
Abstract
A catastrophic landslide struck the Xiaoba village in Fuquan, Guizhou, southwestern China at about 8:30 p.m. (Beijing Time, UTC + 8) on August 27, 2014. The landslide and induced impulse water waves destroyed two villages and killed 23 persons. By reprocessing seismic signals from a seismic network deployed in the surrounding area of the landslide, we recognized the event from low-frequency seismic signals and subsequently performed a long-period seismic waveform inversion to obtain its force–time history. The inversion results reveal that the maximum force for the landslide is 5 × 109 N, and the duration of the landslide is 38.4 s. The landslide reached its maximum velocity of 12.4 m/s at 13.2 s after its initiation, and the mass center plugged into the quarry at 24.2 s. Based on the inversion results, we estimated basal friction of the landslide. We found the friction coefficient rapidly reduces to a relatively steady-state value of ~ 0.4 at a steady-state distance of 35 m and subsequently reduces in a near-linear manner that satisfies the empirical formula \( \mu = - 1.4d + 0.44 \), where \( d \) is sliding distance in km. The reduction in friction revealed by the formula is compatible with the finding of previous studies for landslides of similar volume in landslide acceleration stage. However, our result does not make it possible for the friction coefficient to increase again in landslide deceleration stage that a velocity-dependent friction law would allow. The friction variation patterns can be used to constrain input parameters in numerical landslide simulation, which can predicate runout distance and deposit areas for massive landslides to carry out landslide hazard assessment.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Friction of a landslide is a key parameter to determine its velocity distribution, runout distance and deposit areas, hence controlling the disaster formation process. Friction weakening or reduction, resulting in unexpected long-runout for large landslides, has been widely reported (Lucas et al. 2014) and is believed to be caused by acoustic fluidization based on numerical simulation (Johnson et al. 2016). Empirical laws for friction reduction with increasing landslide volume and sliding velocity have been proposed by coupling numerical modeling of landslides over the real 3D topography and comparing with either field observation of landslide deposits or seismic data (Lucas et al. 2014; Yamada et al. 2016a, 2018; Delannay et al. 2017; Spreafico et al. 2018). However, we still need more case studies to support the friction reduction observed in former studies. Unfortunately, direct measurements for basal friction of large landslides are almost impossible to be carried out due to their unpredictability and destructiveness.
In the recent decades, broadband seismic signals are more and more frequently used in landslide research. The applications include determining the time and location of a landslide (e.g., Lin et al. 2010; Kao et al. 2012; Chen et al. 2013; Hibert et al. 2014b; Levy et al. 2015), quickly estimating the volume and slide distance (e.g., Dammeier et al. 2011; Hibert et al. 2011; Yamada et al. 2012; Lin et al. 2015; Chao et al. 2016; Manconi et al. 2016), and performing long-period waveform inversion to obtain force–time history of landslides (e.g., Moretti et al. 2012; Allstadt 2013; Ekström and Stark 2013; Yamada et al. 2013; Hibert et al. 2014a, 2015; Moretti et al. 2015; Chao et al. 2017; Hibert et al. 2017a, b; Li et al. 2017, 2019b; Kääb et al. 2018). Studies show that quantitative extraction and analysis of landslide seismic signals can help to explain the key stages and processes of landslides and understand their inherent mechanism and geological characteristics (e.g., Favreau et al. 2010; Ekström and Stark 2013; Petley 2013). In addition, based on landslide force history inversion, landslide basal friction can be directly estimated considering a block model (Brodsky et al. 2003; Allstadt 2013; Yamada et al. 2013; Zhao et al. 2015; Li et al. 2017) or obtained from combined analysis with numerical landslide simulation (Moretti et al. 2012, 2015; Yamada et al. 2016a, 2018; Kääb et al. 2018), providing a novel approach to estimate dynamic parameters of landslides.
In this study, we first recognize the landslide from reprocessed seismograms and perform a long-period seismic waveform inversion to obtain its force–time history. We then estimate velocities and displacements of the sliding body from the inversion results to understand its movement characteristics. Finally, we calculate landslide basal friction coefficients and discuss their variation patterns with sliding distance.
2 The Xiaoba landslide
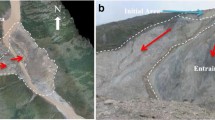
A catastrophic landslide occurred at about 8:30 p.m. (Beijing Time, UTC + 8, used throughout this paper) on August 27, 2014, in Fuquan, Guizhou, China. After the movement on the slope, the sliding mass plunged into the water-filled quarry in front, inducing impulse water waves that destroyed two villages, damaged 77 houses, killed 23 persons and injured 22 others (Xing et al. 2016; Lin et al. 2018). As shown in Fig. 1a, the landslide consists of a source area and an accumulation area. The source area is located on a slope with an altitude between 1290 and 1410 m. By comparing topographic changes before and after the landslide, the total volume of the sliding mass is estimated to be 1.41 million m3. The accumulation area is located right in front of the slope with elevations ranging from 1286 to 1231 m. It is further divided into four subzones, i.e., zone a, b, c and d in Fig. 1a. Zone a consists of the quarry in front of the source area and part of the opposite slope at the southeast side and collects most of the deposited material with a volume of approximately 1.1 million m3. Zones b, c and d are located to the east of zone a, and their depositional volumes are 0.17, 0.15 and 0.2 million m3, respectively (Xing et al. 2016). Field investigations, deformation monitoring and numerical analyses reveal that unfavorable geological structure in the source area was a determinant precondition, and the combined effects of excavation and continuous rainfall were essential factors that directly triggered the landslide (Lin et al. 2018).

a Geological map of the Xiaoba landslide (adapted from Fig. 2 in Xing et al. 2016). b Vertical section along the black straight line in a before (red) and after (black) the landslide. Landslide shape (green solid line), velocity distribution (blue solid line) and mean velocity (blue dotted line) at 9.2 s from the simulation of Xing et al. (2016). The black box is enlarged in c. Color lines in subfigures a, c represent the estimated horizontal and vertical trajectories of the mass center from the inverted force–time history. Black solid circles correspond to the times denoted using dashed lines in Fig. 6
3 Broadband seismic observations
No seismic event has been related to the Xiaoba landslide since seismic signals generated by the event are lacking in high-frequency energy (Fig. 2). We believe that high-frequency signals were generated during the landslide; but their energy was weak and decayed rapidly during the propagation. Therefore, they were not recorded by any seismic stations. When reprocessing seismic signals from a seismic network deployed in the surrounding area of the event, we paid more attention to long-period signals. Using a fourth-order Butterworth filter, we filtered the seismic signals in a frequency band of 20–50 s and plotted the vertical waveforms along the epicentral distances for seismic stations calculated using the location of the landslide (Fig. 3). We choose this frequency band to detect landslide events because duration of a landslide is generally tens of seconds. From the result, we detected a seismic event occurred at approximately 8:03:40 p.m. with linear time lags for each seismic station, showing a best-fit seismic wave propagation velocity of ~ 3.2 km/s, a typical value for landslide signals (Lin 2015). By applying the approach developed by Lin et al. (2015), we further acquired its landslide seismic magnitude (Lm) to be 2.6, which is comparable to that of the Xinmo landslide whose volume and Lm are 4.46 million m3 and 3.6, respectively (Fan et al. 2017), suggesting a large-scale landslide. We used the following procedure to calculate the Lm for the Xiaoba landslide. First, we filtered the vertical displacement (μm) in a frequency band of 20–50 s; and then determined the maximum amplitude. Finally, we calculated the Lm by using the maximum amplitude and epicentral distance in the empirical formula proposed by Lin et al. (2015). Although the empirical formula was derived by best-fitting seismic data in Taiwan region, its application can be extended to other regions, since it uses long-period seismic data whose attenuation characteristics are relatively stable in different regions.

Broadband seismic records of the Xiaoba landslide at the a GYA and b ZYT seismic stations. The red vertical lines show the start and end of the event. Original record, high-pass-filtered record at 1 Hz and low-pass-filtered record at 0.1 Hz are provided from top to bottom

Seismograms recorded at broadband seismic stations in the surrounding area of the landslide and filtered using a frequency band of 20–50 s. The magenta-dashed line gives the best-fit propagation velocity of 3.2 km/s for seismic waves
4 Landslide force history
Different from a double-couple (DC) representation for an earthquake source (Aki and Richards 2002), a landslide source is better represented by a single force (SF) model (e.g., Kanamori and Given 1982; Kanamori et al. 1984; Hasegawa and Kanamori 1987; Dahlen 1993; Fukao 1995; Chao et al. 2017). It means that a landslide source is equivalent to a time series of force vectors exerted on surface of the solid earth while unloading and reloading, corresponding to bulk acceleration and deceleration of the landslide. During the process, long-period seismic signals are generated and subsequently recorded at seismic stations (e.g., Moretti et al. 2012; Ekström and Stark 2013; Hibert et al. 2014a, 2015; Chao et al. 2016). In computational seismology, a landslide source could be theoretically treated as a moving point mass with time-varying forces, a combination of gravitation, centripetal forces and friction (e.g., Zhao et al. 2015; Gualtieri and Ekström 2018). However, to simplify computation it is most frequently assumed to be at a fixed location. The assumption is valid for seismic stations with an epicentral distance that is much greater than horizontal dimension of the landslide. Based on the SF representation and the fixed point mass assumption for a landslide source, a landslide seismic record at a given station could be stated as the convolution of the time series of force vectors in the source area with Green’s Functions (e.g., Moretti et al. 2012; Allstadt 2013; Ekström and Stark 2013; Yamada et al. 2013; Hibert et al. 2014a; Li et al. 2017). Landslide force history inversion is the opposite process, deconvolving Green’s Functions with seismic records to obtain time series of force vectors.
There are two major kinds of approaches in the implementation of the inversion algorithm. One approach parameterizes the time-varying force as a sequence of partially overlapping isosceles triangles and solve for the amplitude of each triangle by best fitting the synthetic and recorded seismograms in a least-square sense (e.g., Ekström and Stark 2013; Hibert et al. 2014a, 2015; Chao et al. 2016; Kääb et al. 2018; Schöpa et al. 2018). The other approach directly deconvolves Green’s Functions with seismic records to obtain time series of force vectors with or without prior constraints on start and end times of the event (e.g., Allstadt 2013; Yamada et al. 2013; Moretti et al. 2015; Li et al. 2017; Gualtieri and Ekström 2018; Li et al. 2019a). Basically, these two approaches can give similar results and main differences come from the different frequency bands of seismic data used in the inversion (Moore et al. 2017).
Using the second approach and the algorithm developed by Li et al. (2017), we performed an inversion of the long-period seismic signals with a frequency band between 0.015–0.05 Hz (20–66.7 s) to determine force–time history of the Xiaoba landslide. As shown in Fig. 2, duration of the seismic event is approximately 57.6 s. Therefore, we chose this frequency band to carry out the inversion instead of the one previously used in detection of the event (20–50 s) to cover the broadest cycle of the acceleration and deceleration within possibility. The frequency band of seismic data used in the inversion must fully include the acceleration and deceleration stages of the landslide. Otherwise, the trajectory of the landslide cannot be reconstructed due to the lack of low-frequency energy, and the calculation based on the inversion results is also unreliable. Uncertainties in the waveform inversion mainly result from the quality of the seismic data. As demonstrated by Chao et al. (2016), only seismic stations with good signal-to-noise ratio (SNR) are sufficient to produce reliable inversion results. Moretti et al. (2015) showed that the force could be recovered with a good accuracy by using only one seismic station as long as the seismic data quality is high enough. Table 1 gives the SNR for the seismic traces at the closest six seismic stations, from which we selected ten traces with good SNR to carry out the waveform inversion. For seismic data processing, we first removed instrumental response for each seismic record to get displacement; and subsequently band pass filtered the seismic records in the desired frequency band using a fourth-order Butterworth filter; finally we resampled seismic records to 0.2 s. Green’s Functions are calculated for each seismic station using a matrix propagation method developed by Wang (1999). The velocity model used in calculation is derived from Crust1.0 (https://igppweb.ucsd.edu/~gabi/crust1.html). Location of the landslide was simultaneously acquired using a refined grid search method. We calculated Green’s Functions at each source node shown in Fig. 4 using black points and determined the corresponding force–time history by best-fitting synthetic waveforms to the seismic data in a least-square sense. Contour lines of normalized residuals are provided in Fig. 4, indicating that the inversion converged to the actual landslide location (Xing et al. 2016; Lin et al. 2018) with an error of ~ 3.0 km. The best-fitting landslide location allows us to confirm that the seismic energy recorded by seismic stations was indeed generated by the landslide. The location error is negligible compared to the epicentral distances for seismic stations used in the inversion. Also, long-period seismic signals are not sensitive to spatial dimension of hundred-to-ten meters. Therefore, the inverted forces would not be influenced much by the location error.

Distribution of seismic stations used in the study (blue triangles) and contour lines of normalized inversion residuals. The red star represents the landslide location determined using the grid search approach
To improve computational efficiency, the inversion was carried out in the frequency domain and an inverse Fourier transform was subsequently performed on the solution to determine force–time histories for three components. The well-fit synthetic and recorded seismic waveforms shown in Fig. 5 and the high cross-correlation (CC) and variance reduction (VR) between synthetic and recorded seismograms provided in Table 1 suggest a high quality in the inversion results. To analyze the inversion stability, we followed the approach of Moretti et al. (2015); firstly extracted 80–100% seismic traces to carry out the inversion, and secondly determined the 90% confidence interval for the multiple inversion results, shown in Fig. 6. We observe that the inversion results are very stable.

Synthetic (red lines) and recorded (black lines) seismograms. Red-dotted lines indicate that the seismic trace is not used in the inversion. Station name and distance (km)/azimuth (degree) are given at the left of each trace. The maximum amplitude of the three components is given in μm to the right of the traces

Inverted force–time history for the Xiaoba landslide (red solid lines) and 90% confidence interval of the solution estimated using multiple inversions with randomly selected seismograms (pink area)
Figure 7a shows the results of the inversion for the landslide force history, revealing that the landslide started at 08:03:56.6 p.m. The maximum force for the landslide is 5 × 109 N, and the duration of the landslide is 38.4 s. Since the inversion results represent force–time series exerting on surface of the solid earth, the forces acting on the sliding body can be easily calculated by simply multiplying by − 1 according to the action–reaction law (e.g., Kanamori and Given 1982; Allstadt 2013; Yamada et al. 2013; Li et al. 2017). Integrating the force–time history with respect to time once and twice, respectively, and dividing by an average mass of the sliding body, we estimated its velocities and displacements. Figure 7b, c shows the absolute velocity and displacement of the sliding body. The mass of the sliding body used in the calculation is estimated to be 2.961 × 109 kg using a volume of 1.41 × 106 m3 (Xing et al. 2016; Lin et al. 2018) and a density of 2.1 × 103 kg/m3, which Xing et al. (2016) found to be suitable for simulating the landslide-induced impulse water generation and propagation. Estimations for the landslide mass using empirical relationships of Chao et al. (2016) and Ekström and Stark (2013) are 2.052 × 109 kg and 2.736 × 109 kg, respectively, providing independent constraint on sliding mass rapidly after event occurrence with high reliability. Reconstructed horizontal path of the sliding body in Fig. 1a gives the best-fit azimuth of 132°, comparing perfectly with the satellite image after the sliding (Lin et al. 2018). Projecting the horizontal components of the displacement of the sliding body to its movement direction, we acquired a movement profile for the mass center along the path that is plotted in Fig. 1c.

a Inverted force–time history for the Xiaoba landslide. Estimated absolute velocity (b) and displacement (c) of the sliding body. d Estimated basal landslide friction coefficients along time. Vertical black-dashed lines divide the landslide into three stages
5 Dynamics of the Xiaoba landslide
Based on the inversion results, we divide the landslide into three stages. In the first stage (0–13.2 s), the sliding body gradually accelerates after a smooth initiation and reaches its maximum velocity of 12.4 m/s at 13.2 s. This result is consistent with the dynamic simulation for the landslide carried out by Xing et al. (2016). The simulation gave maximum front velocity and mean velocity of 27.6 m/s and 10.6 m/s, respectively, occurring 9.2 s after the initiation (Fig. 1b). Keep in mind that the inversion treated the sliding body as a point mass, therefore, the inversion results mainly represent movement characteristics of the mass center and are more like a mean velocity of the sliding mass. Using the location of the mass center in the source area before sliding as a starting point, we superpose the inverted horizontal and vertical trajectories of the sliding mass on profiles of the landslide (Fig. 1a, c) for comparison. In the second stage (13.2–24.2 s), the sliding body decelerates due to reduction in the dip angle along the path. As shown in Fig. 1b, the mass center reaches the toe of the slope at the end of this stage. Figure 1a, b reveals that both of the reconstructed horizontal and vertical paths of the mass center for the first two stages fit perfectly with the satellite image and the landslide profile after the landslide, suggesting that the mass center moved on the slope during the first two stages (0–24.2 s) and left the slope, plunging into the quarry in the third stage (24.2–38.4 s). In this stage, forces exerting on surface of the solid earth involve interactions with water, generating impulse wave that caused significant damage to local residents (Xing et al. 2016). As the additional interaction mechanism is involved, the action–reaction law between the sliding body and the solid earth does not work anymore. Therefore, the estimated velocity and displacement (Fig. 6b, c) for this stage become meaningless. Nevertheless, we observed the maximum force for this stage to be 2.56 × 109 N, suggesting a strong interaction with water. In this stage, the highest force existed in the north–south direction. As shown in Fig. 1a, the depositional areas of zones b, c and d are located to the east of zone a, i.e., the quarry, indicating that the forces generated by the water impulse were fully released in the east–west direction by flushing over the bank and the forces in the north–south direction were recorded by the seismic stations.
As initially proposed by Brodsky et al. (2003), landslide basal friction can be estimated from seismic observations based on a block model. They consider all components of the force in their formula, but choose to only use the horizontal one in the calculation, since in previous researches landslide sources are frequently treated as a nearly horizontal single force (e.g., Kanamori and Given 1982; Kanamori et al. 1984; Dahlen 1993). However, with the development of the long-period seismic inversion, three-dimensional forces of landslides are rebuilt and the vertical forces are also taken into account in the estimation of landslide basal friction (e.g., Allstadt 2013; Yamada et al. 2013; Zhao et al. 2015; Li et al. 2017). Using the following equation (e.g., Yamada et al. 2013; Li et al. 2017), we calculated basal friction coefficient for the landslide:
where f is the total force, m is the mass of the sliding body, \( g \) is the gravitational acceleration, \( \theta \) is the dip angle of the slope, and \( \mu \) is the basal friction coefficient. Projecting the inversion results onto the sliding path, we acquired the force (Fig. 8a) on the sliding body with a shape that is very similar to the theoretical simulation (Brodsky et al. 2003). The sliding mass was estimated to be 2.961 × 109 kg. Different from the approach of Yamada et al. (2013) and Li et al. (2017), in which they only used the mean dip angle in calculation, we used the varying dip angle for each location (Fig. 8b), and the calculated basal friction coefficients are provided in Fig. 8c. Neglecting boundary effects at both sides, we observed that the friction coefficient rapidly decreases during the first 9.5 s of the landslide and reached a relatively steady-state value of ~ 0.4 at a steady-state distance (Dc) of 35 m. These values are consistent with the results of Yamada et al. (2013). After that, the friction coefficient reduces in a near-linear manner with the best-fit formula as follows:
where \( d \) is the sliding distance in km.

a Inverted total force exerted on the sliding body. b Dip angle along the slope calculated from the inversion results (black line) and slope angle derived from the DTM using a distance increment of 2 m (red line). c Estimated basal landslide friction coefficients along sliding distance. The red-dashed line shows the variation pattern of friction coefficient resolved from linear regression. The short-dashed line shows the steady-state distance (Dc)
Empirical laws of effective friction reduction with increasing landslide volume and sliding velocity have been proposed based on numerical modeling of landslides over the real 3D topography (Lucas et al. 2014; Delannay et al. 2017; Spreafico et al. 2018). The empirical law with respect to landslide volume gives a friction coefficient of 0.33 for the Xiaoba landslide using the volume of 1.41 × 106 m3. This result is very close to our mean value of 0.31 (excluding boundary effects). If we take into account the friction coefficient during the initial accelerating stage, our mean value is 0.37 (Fig. 9a), slightly larger than that estimated from the empirical law. This result is consistent with Moretti et al. (2015), who found that the best-fitting friction coefficient for the Mount Meager landslide was 0.33, lower than that estimated by Allstadt (2013) (0.38). Lucas et al. (2014) interpreted the volume dependence of landslide effective friction as velocity dependence and gave a function with best-fitting parameters to describe the relationship in between. As a comparison, we show our friction coefficients with the sliding velocity in Fig. 9b. At the acceleration stage, our result fits perfectly with their predicated curve, especially after the stable state velocity; however, at the deceleration stage, our result does not make it possible for the friction coefficient to increase again that a velocity-dependent friction law would allow, indicating that changes in the landslide basal status occurred in the acceleration stage can affect the effective friction in the deceleration stage. By comparing the forces obtained from a numerical simulation to those resolved from seismic waveform inversion, Yamada et al. (2018) derived velocity-dependent friction laws for four landslides occurred in Japan with volumes of 2–8 × 106 m3. We compare our result with their friction law for the Nonoo landslide whose volume is the closest to the Xiaoba landslide. As illustrated by Fig. 9b, the reduction in friction with respect to velocity is observed by both results. However, their friction law does not distinguish between the acceleration stage and the deceleration stage. Our result gives reduction in friction in the acceleration stage which is compatible with their friction law but with larger values and continues to decrease in the deceleration stage showing different characteristics and smaller values. Their result is like the average of our results for the two stages.

a Comparison with other studies. Results of the x marks are obtained by the numerical simulation benchmarked by the deposits, circles are obtained by the numerical simulation benchmarked by the seismic signals, and triangles are obtained by the force history of seismic waveform inversion (adapted from Fig. 7b in Yamada et al. (2018)). b The estimated basal friction coefficient as a function of the flow velocity (color solid circles), the empirical relationship from Lucas et al. (2014) (red line) and the friction law for the Nonoo landslide (black line) from Yamada et al. (2018)
6 Conclusions
We recognized the seismic event related to the catastrophic Xiaoba landslide occurred at about 8:04 p.m. (Beijing Time, UTC + 8) on August 27, 2014, from band-pass-filtered seismic records in a frequency band of 20–50 s. We performed a long-period seismic waveform inversion and obtained the force–time history for the landslide. The inversion results reveal that the maximum force for the landslide is 5 × 109 N, and the duration of the landslide is 38.4 s. Based on the inversion results, we divided the landslide into three stages with durations of 13.2 s, 11 s and 14.2 s, respectively. The landslide reached its maximum velocity of 12.4 m/s at the end of the first stage, and the mass center plugged into the quarry at the second stage. The last stage of the landslide involves interactions with water in the quarry below the source area, generating a maximum force of 2.56 × 109 N.
Weak interaction and fragmentation occurring during the landslide characterized by lacking high-frequency energy in seismic records and perfect inversion results allow us to study dynamic evolution of basal friction for the landslide. We estimated basal landslide friction coefficients from the inversion results, using the varying dip angle for each mass center location. We conclude that the friction coefficient rapidly reduces to a relatively steady-state value of ~ 0.4 at a distance of 35 m and subsequently reduces in a near-linear manner that satisfies the formula \( \mu = - 1.4d + 0.44 \), where \( d \) is sliding distance in km. The reduction in friction revealed by the formula is compatible with the finding of Yamada et al. (2018) for landslides of similar volume. However, our result does not make it possible for the friction coefficient to increase again in landslide deceleration stage that a velocity-dependent friction law would allow; indicating that changes in the landslide basal status occurred in the acceleration stage can affect the effective friction in the deceleration stage. The friction variation patterns can be used to constrain input parameters in numerical landslide simulations as have been done by (Moretti et al. 2015) and (Yamada et al. 2016b, 2018) based on the results from (Allstadt 2013) and (Yamada et al. 2013), respectively. By comparing basal friction coefficients estimated from long-period seismic waveform inversion for other landslides and the prediction using the formula, it is also possible to study interactions and fragmentations occurred during the landslide and the energy budget involved in the process.
References
Aki K, Richards PG (2002) Quantitative seismology: theory and methods, 2nd edn. University Science Books, Sausalito
Allstadt K (2013) Extracting source characteristics and dynamics of the August 2010 Mount Meager landslide from broadband seismograms. J Geophys Res Earth Surf 118:1472–1490. https://doi.org/10.1002/jgrf.20110
Brodsky EE, Gordeev E, Kanamori H (2003) Landslide basal friction as measured by seismic waves. Geophys Res Lett 30:2236. https://doi.org/10.1029/2003GL018485
Chao W-A, Zhao L, Chen S-C, Wu Y-M, Chen C-H, Huang H-H (2016) Seismology-based early identification of dam-formation landquake events. Sci Rep 6:19259. https://doi.org/10.1038/srep19259
Chao W-A, Wu Y-M, Zhao L, Chen H, Chen Y-G, Chang J-M, Lin C-M (2017) A first near real-time seismology-based landquake monitoring system. Sci Rep 7:43510. https://doi.org/10.1038/srep43510
Chen C-H et al (2013) A seismological study of landquakes using a real-time broad-band seismic network. Geophys J Int 194:885–898. https://doi.org/10.1093/gji/ggt121
Dahlen FA (1993) Single-force representation of shallow landslide sources. Bull Seismol Soc Am 83:130–143
Dammeier F, Moore JR, Haslinger F, Loew S (2011) Characterization of alpine rockslides using statistical analysis of seismic signals. J Geophys Res Earth Surf 116:F04024. https://doi.org/10.1029/2011JF002037
Delannay R, Valance A, Mangeney A, Roche O, Richard P (2017) Granular and particle-laden flows: from laboratory experiments to field observations. J Phys D Appl Phys 50:053001. https://doi.org/10.1088/1361-6463/50/5/053001
Ekström G, Stark CP (2013) Simple scaling of catastrophic landslide dynamics. Science 339:1416–1419. https://doi.org/10.1126/science.1232887
Fan X et al (2017) Failure mechanism and kinematics of the deadly June 24th 2017 Xinmo landslide, Maoxian, Sichuan, China. Landslides 14:2129–2146. https://doi.org/10.1007/s10346-017-0907-7
Favreau P, Mangeney A, Lucas A, Crosta G, Bouchut F (2010) Numerical modeling of landquakes. Geophys Res Lett 37:L15305. https://doi.org/10.1029/2010GL043512
Fukao Y (1995) Single-force representation of earthquakes due to landslides or the collapse of caverns. Geophys J Int 122:243–248. https://doi.org/10.1111/j.1365-246X.1995.tb03551.x
Gualtieri L, Ekström G (2018) Broad-band seismic analysis and modeling of the 2015 Taan Fjord, Alaska landslide using Instaseis. Geophys J Int 213:1912–1923. https://doi.org/10.1093/gji/ggy086
Hasegawa H, Kanamori H (1987) Source mechanism of the magnitude 7.2 Grand Banks earthquake of November 1929: double couple or submarine landslide? Bull Seismol Soc Am 77:1984–2004
Hibert C, Mangeney A, Grandjean G, Shapiro NM (2011) Slope instabilities in Dolomieu crater, Réunion Island: from seismic signals to rockfall characteristics. J Geophys Res Earth Surf 116:F04032. https://doi.org/10.1029/2011JF002038
Hibert C, Ekström G, Stark CP (2014a) Dynamics of the Bingham Canyon Mine landslides from seismic signal analysis. Geophys Res Lett 41:4535–4541. https://doi.org/10.1002/2014GL060592
Hibert C et al (2014b) Automated identification, location, and volume estimation of rockfalls at Piton de la Fournaise volcano. J Geophys Res Earth Surf 119:1082–1105. https://doi.org/10.1002/2013JF002970
Hibert C, Stark C, Ekström G (2015) Dynamics of the Oso-Steelhead landslide from broadband seismic analysis. Nat Hazards Earth Syst Sci 15:1265–1273. https://doi.org/10.5194/nhess-15-1265-2015
Hibert C et al (2017a) Single-block rockfall dynamics inferred from seismic signal analysis. Earth Surf Dyn 5:283–292. https://doi.org/10.5194/esurf-5-283-2017
Hibert C et al (2017b) Spatio-temporal evolution of rockfall activity from 2007 to 2011 at the Piton de la Fournaise volcano inferred from seismic data. J Volcanol Geoth Res 333–334:36–52. https://doi.org/10.1016/j.jvolgeores.2017.01.007
Johnson BC, Campbell CS, Melosh HJ (2016) The reduction of friction in long runout landslides as an emergent phenomenon. J Geophys Res Earth Surf 121:881–889. https://doi.org/10.1002/2015JF003751
Kääb A et al (2018) Massive collapse of two glaciers in western Tibet in 2016 after surge-like instability. Nat Geosci 11:114–120. https://doi.org/10.1038/s41561-017-0039-7
Kanamori H, Given JW (1982) Analysis of long-period seismic waves excited by the May 18, 1980, eruption of Mount St. Helens—a terrestrial monopole? J Geophys Res Solid Earth 87:5422–5432. https://doi.org/10.1029/JB087iB07p05422
Kanamori H, Given JW, Lay T (1984) Analysis of seismic body waves excited by the Mount St. Helens eruption of May 18, 1980. J Geophys Res Solid Earth 89:1856–1866. https://doi.org/10.1029/JB089iB03p01856
Kao H et al (2012) Locating, monitoring, and characterizing typhoon-linduced landslides with real-time seismic signals. Landslides 9:557–563. https://doi.org/10.1007/s10346-012-0322-z
Levy C, Mangeney A, Bonilla F, Hibert C, Calder ES, Smith PJ (2015) Friction weakening in granular flows deduced from seismic records at the Soufrière Hills Volcano, Montserrat. J Geophys Res Solid Earth 120:7536–7557. https://doi.org/10.1002/2015JB012151
Li Z, Huang X, Xu Q, Yu D, Fan J, Qiao X (2017) Dynamics of the Wulong landslide revealed by broadband seismic records. Earth Planets Space 69:27. https://doi.org/10.1186/s40623-017-0610-x
Li W, Chen Y, Liu F, Yang H, Liu J, Fu B (2019a) Chain-style landslide hazardous process: constraints from seismic signals analysis of the 2017 Xinmo Landslide, SW China. J Geophys Res Solid Earth 1:1. https://doi.org/10.1029/2018jb016433
Li Z-y, Huang X-h, Yu D, Su J-r, Xu Q (2019b) Broadband-seismic analysis of a massive landslide in southwestern China: dynamics and fragmentation implications. Geomorphology 336:31–39. https://doi.org/10.1016/j.geomorph.2019.03.024
Lin C-H (2015) Insight into landslide kinematics from a broadband seismic network. Earth Planets Space 67:8. https://doi.org/10.1186/s40623-014-0177-8
Lin CH, Kumagai H, Ando M, Shin TC (2010) Detection of landslides and submarine slumps using broadband seismic networks. Geophys Res Lett 37:L22309. https://doi.org/10.1029/2010GL044685
Lin CH, Jan JC, Pu HC, Tu Y, Chen CC, Wu YM (2015) Landslide seismic magnitude. Earth Planet Sci Lett 429:122–127. https://doi.org/10.1016/j.epsl.2015.07.068
Lin F, Wu LZ, Huang RQ, Zhang H (2018) Formation and characteristics of the Xiaoba landslide in Fuquan, Guizhou, China. Landslides 15:669–681. https://doi.org/10.1007/s10346-017-0897-5
Lucas A, Mangeney A, Ampuero JP (2014) Frictional velocity-weakening in landslides on Earth and on other planetary bodies. Nat Commun 5:3417. https://doi.org/10.1038/ncomms4417
Manconi A, Picozzi M, Coviello V, De Santis F, Elia L (2016) Real-time detection, location, and characterization of rockslides using broadband regional seismic networks. Geophys Res Lett 43:6960–6967. https://doi.org/10.1002/2016GL069572
Moore JR, Pankow KL, Ford SR, Koper KD, Hale JM, Aaron J, Larsen CF (2017) Dynamics of the Bingham Canyon rock avalanches (Utah, USA) resolved from topographic, seismic, and infrasound data. J Geophys Res Earth Surf 122:615–640. https://doi.org/10.1002/2016JF004036
Moretti L, Mangeney A, Capdeville Y, Stutzmann E, Huggel C, Schneider D, Bouchut F (2012) Numerical modeling of the Mount Steller landslide flow history and of the generated long period seismic waves. Geophys Res Lett 39:L16402. https://doi.org/10.1029/2012GL052511
Moretti L, Allstadt K, Mangeney A, Capdeville Y, Stutzmann E, Bouchut F (2015) Numerical modeling of the Mount Meager landslide constrained by its force history derived from seismic data. J Geophys Res Solid Earth 120:2579–2599. https://doi.org/10.1002/2014JB011426
Petley DN (2013) Characterizing giant landslides. Science 339:1395–1396. https://doi.org/10.1126/science.1236165
Schöpa A, Chao WA, Lipovsky BP, Hovius N, White RS, Green RG, Turowski JM (2018) Dynamics of the Askja caldera July 2014 landslide, Iceland, from seismic signal analysis: precursor, motion and aftermath. Earth Surf Dyn 6:467–485. https://doi.org/10.5194/esurf-6-467-2018
Spreafico MC, Wolter A, Picotti V, Borgatti L, Mangeney A, Ghirotti M (2018) Forensic investigations of the Cima Salti Landslide, northern Italy, using runout simulations. Geomorphology 318:172–186. https://doi.org/10.1016/j.geomorph.2018.04.013
Wang R (1999) A simple orthonormalization method for stable and efficient computation of Green’s functions. Bull Seismol Soc Am 89:733–741
Xing A, Xu Q, Zhu Y, Zhu J, Jiang Y (2016) The August 27, 2014, rock avalanche and related impulse water waves in Fuquan, Guizhou, China. Landslides 13:411–422. https://doi.org/10.1007/s10346-016-0679-5
Yamada M, Matsushi Y, Chigira M, Mori J (2012) Seismic recordings of landslides caused by Typhoon Talas (2011), Japan. Geophys Res Lett 39:L13301. https://doi.org/10.1029/2012GL052174
Yamada M, Kumagai H, Matsushi Y, Matsuzawa T (2013) Dynamic landslide processes revealed by broadband seismic records. Geophys Res Lett 40:2998–3002. https://doi.org/10.1002/grl.50437
Yamada M, Mangeney A, Matsushi Y, Moretti L (2016a) Estimation of dynamic friction of the Akatani landslide from seismic waveform inversion and numerical simulation. Geophys J Int 206:1479–1486. https://doi.org/10.1093/gji/ggw216
Yamada M, Mori J, Matsushi Y (2016b) Possible stick-slip behavior before the Rausu landslide inferred from repeating seismic events. Geophys Res Lett 43:9038–9044. https://doi.org/10.1002/2016GL069288
Yamada M, Mangeney A, Matsushi Y, Matsuzawa T (2018) Estimation of dynamic friction and movement history of large landslides. Landslides 15:1963–1974. https://doi.org/10.1007/s10346-018-1002-4
Zhao J et al (2015) Model space exploration for determining landslide source history from long-period seismic data. Pure appl Geophys 172:389–413. https://doi.org/10.1007/s00024-014-0852-5
Acknowledgements
We are grateful to Dr. Yanlu Ma from the China Earthquake Networks Center for his helpful comments on the calculation of Green’s Functions. The seismic data used in this study are provided by the China Earthquake Networks Center (http://www.cenc.ac.cn/). The velocity model used in the inversion is from Crust1.0 (https://igppweb.ucsd.edu/~gabi/crust1.html). RDSEED (http://ds.iris.edu/ds/nodes/dmc/manuals/rdseed/) and SAC software packages (http://ds.iris.edu/files/sac-manual/) were used for the seismic data processing. QSEIS06 (https://www.gfz-potsdam.de/) was used to calculate Green’s Functions. This research is financially supported by National Key Basic Research Program of China (Grant No. 2013CB733200). We would like to extend special thanks to anonymous reviewers for their valuable suggestions, which greatly improved the quality of this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Yu, D., Huang, X. & Li, Z. Variation patterns of landslide basal friction revealed from long-period seismic waveform inversion. Nat Hazards 100, 313–327 (2020). https://doi.org/10.1007/s11069-019-03813-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11069-019-03813-y