
Abstract
A novel approach is suggested for reducing traffic conflicts in at-grade (2D) urban networks. Intersections without primary vehicular conflicts are defined as zero traffic conflict (ZTC) designs. A complete classification of maximal ZTC designs is presented, including designs that combine driving on the right side in some streets and driving on the left side in other streets. It is shown that there are 9 four-way and 3 three-way maximal ZTC intersection designs, to within mirror, rotation, and arrow reversal symmetry. Vortices are used to design networks where all or most intersections are ZTC. Increases in average travel distance, relative to unrestricted intersecting flow, are explicitly calculated for grid-networks of sizes 10 by 10, 10 by 20 and 20 by 20 nodes with evenly distributed origins and destinations. The exact increases depend primarily on various short-range conditions, such as the access to the network. The average distance increase in most cases examined is up to four blocks. These results suggest that there is a potential for the new designs to be relevant candidates in certain circumstances, and that further study of them is worthwhile.











Similar content being viewed by others


Notes
Note that even in unrestricted networks, the shortest distance may be longer than the rectilinear distance.
References
Blunden WR, Bunton RB (1962) An analysis of route factors for one-way and two-way street systems. Proceeding of 1st conference, Australian Road Research Board 1:443–454. Australian Road Research Board, Melbourne
Boyles SD (2012) Bush-based sensitivity analysis for approximating subnetwork diversion. Transport Res Part B 46(1):139–155
Cantarella GE, Vitetta A (2006) The multi-criteria road network design problem in an urban area. Transport 33:567–588
Cova TJ, Johnson JP (2003) A network flow model for lane-based evacuation routing. Transport Res Part A 37:579–604
Frank L, Bradley M, Kavage S, Chapman J, Lawton TK (2008) Urban form, travel time, and cost relationships with tour complexity and mode choice. Transport 35:37–54
Fuerstenberg K (2009) Cooperative intersection safety: user needs and operational requirements for cooperative intersection safety system. Deliverable D3.1. http://www.intersafe-2.eu/public/public-documents/deliverables/d3_1_intersafe-2_user_needs_and_requirements_v1-05-final.pdf, accessed December 17, 2011
HCM (2010) Highway capacity manual. Transportation Research Board of the National Academies, Washington
Holroyd EM (1966) Theoretical average journey lengths in circular towns with various routeing systems. Report 43, Transport and Road Research Laboratory, Crowthorne, Berkshire, UK
Holroyd EM (1968) Routeing traffic in a square town to minimize route-crossings. Road Research Laboratory technical note, Crowthorne, Berkshire, UK. Beiträge zur Theorie des Verkehrflusses, Strassenbau und Strassenverkehrstechnik 86:166–175
Holroyd EM, Miller AJ (1966) Route crossings in urban areas. Proceeding of 3rd conference, Australian Road Research Board 3:394–419, Australian Road Research Board, Melbourne
HSM (2010) Highway safety manual. The American Association of State Highway and Transportation Officials, Washington
Hummer JE (1998) Unconventional left turn alternatives for urban and suburban arterials: part one. Institute of Transportation Engineering Journal 68(9):26–29
Karoonsoontawong A, Waller ST (2010) Integrated network capacity expansion and traffic signal optimization problem: robust bi-level dynamic formulation. Network Spatial Econ 10:525–550. doi:10.1007/s11067-008-9071-x
Kornhauser AL (2005) Personal rapid transit for New-Jersey. http://www.princeton.edu/~alaink/Orf467F04/NJ%20PRT%20Final%20Small.pdf, accessed June 6, 2012
Lin DY, Xie C (2011) The pareto-optimal solution set of the equilibrium network design problem with multiple commensurate objectives. Network Spatial Econ 11:727–751. doi:10.1007/s11067-010-9146-3
Marshall WE, Garrick NW (2010) Effect of street network design on walking and biking. Transportation Research Record: Journal of the Transportation Research Board 2198:103–115
Marshall WE, Garrick NW (2011) Does street network design affect traffic safety? Accid Anal Prev 43:769–781
Mathew TV, Sharma S (2009) Capacity expansion problem for large urban transportation networks. ASCE J Transport Eng 135(7):406–415
Miandoabchi E, Zanjirani Farahani R, Wout Dullaert W, Szeto WY (2012) Hybrid evolutionary metaheuristics for concurrent multi-objective design of urban road and public transit networks. Network Spatial Econ Published on line. doi:10.1007/s11067-011-9163-x
Parsons GF (2007) The parallel flow intersection: a new two-phase signal alternative. Institute of Transportation Engineering Journal 77(10):28–32
Santos B, Antunes A, Miller EJ (2008) Integrating equity objectives in a road network design model. Transportation Research Record: Journal of the Transportation Research Board 2089:35–42
Sohn K (2011) Multi-objective optimization of a road diet network design. Transportation Research Part A 45:499–511
Tabernero V, Sayed T (2006) Upstream signalized crossover intersection an unconventional intersection scheme. ASCE J Transport Eng 132(11):907–911
Uchida K, Sumalee A, Watling D, Connors R (2007) A study on network design problems for multi-modal networks by probit-based stochastic user equilibrium. Network Spatial Econ 7(3):213–240
Ukkusuri SV, Waller ST (2008) Linear programming models for the user and system optimal dynamic network design problem: formulations, comparisons and extensions. Network Spatial Econ 8:383–406. doi:10.1007/s11067-007-9019-6
Tong CO, Wong SC (1997) The advantages of a high density, mixed land use, linear urban development. Transport 24:295–307
Vance C, Hedel R (2007) The impact of urban form on automobile travel: disentangling causation from correlation. Transport 34:575–588
Vaughan R (1987) Urban spatial traffic patterns. Pion Limited, London
Vitins BJ, Axhausen KW (2009) Optimization of large transport networks using the ant colony heuristic. Comput Aided Civ Infrastruct Eng 24(1):1–14
Vitins BJ, Schüssler N, Axhausen KW (2012) Comparison of hierarchical network design shape grammars for roads and intersection. Paper presented at the 91th Annual Meeting of the Transportation Research Board, Washington DC
Wang DZW, Lo HK (2010) Global optimum of the linearized network design problem with equilibrium flows. Transportation Research Part B 44:482–492
Won JM, Karray F (2007) A genetic algorithm with cycle representation and contraction digraph model for Guideway Network design of Personal Rapid Transit. IEEE Congress on Evolutionary Computation
Acknowledgements
This research was partially supported by the Israeli Science Foundation, US-Israel Bi-National Science Foundation (BSF), and the Joan and Robert Arnow Chair of Theoretical Astrophysics. Comments and suggestions by David Boyce and two anonymous referees are greatly appreciated.
Author information
Authors and Affiliations
Corresponding author
Appendix: classification of maximal connected zero-traffic-conflict intersection designs
Appendix: classification of maximal connected zero-traffic-conflict intersection designs
In Section 3 we presented a few zero-traffic-conflict (ZTC) intersection designs which we consider most useful. The list there is in fact an almost comprehensive list of all maximal ZTC intersection designs. It is clear that eliminating a turning movement from any ZTC design yields a ZTC design. A ZTC design is maximal if adding any other turning movement, including the possibility of driving on the left side of the road, leads to crossing conflicts. (We do assume that in each road all traffic in the same direction travels on the same side.) A classification of all maximal ZTC designs is therefore useful because all other ZTC designs can be derived from the maximal ones.
For obvious reasons we consider only connected designs, where every permitted arriving direction to the intersection is connected to at least one permitted direction leaving the intersection, and vice versa. (For example, a design where all four legs are one way and leading to the intersection is not considered.) Figure 12 shows six additional zero-traffic-conflict designs of four-leg intersections. Designs 12a and 12b are equivalent to within symmetry operations, and so are 12c and 12d. All six designs are presented to support the following discussion. These are more peculiar designs, as through traffic switches from driving on one side of the road to the other. These designs are presented here for completeness of the classification, despite the low likeliness that they might turn out to be useful in any realistic network configuration.
The designs in Figs. 2 and 12 are maximal, and so is 3b. Design 3a is not maximal because the W-S and E-N turning movements can be added, leading to the design in 2b. Designs 3c, 3d and 3e are also not maximal because the W-S turning movement can be added, leading to the designs 2c, 2d and 2b respectively. Although not maximal, the ZTC intersection designs in 3a, 3c, 3d & 3e may be the best possible option in certain constellations of link direction permissions, as illustrated by the network designs in Figs. 4, 5, 6, 7, and 8.
Lemma 1
if there is a turning movement between a pair of neighboring legs (a corner) in a ZTC intersection, there is a sidewalk turning movement between the same approaches.
Proof
Suppose that the legs are south and east, and that there is a permitted turning movement turning right from south to east (S-E). If S-E is not a sidewalk turning movement, there should be a turning movement that separates the S-E turn from one of the sidewalk. This separating movement should travel south on the left (east) side of the south leg, travel west on the left (south) side of the east leg, or both. The only movement that can separate the S-E turn from the sidewalk without crossing it is the E-S left turn. If permitted, the E-S would be a sidewalk turning movement; otherwise, the S-E turning movement is a sidewalk turning movement.
Lemma 2
If there are two neighboring one way legs, the intersection design is not a maximal ZTC.
Proof
Suppose the west and south legs are one way (for example, as in Fig. 3(c, d & e)). If the one-way direction of the west leg is away from the intersection (west-bound), a W-S right turn can be added by reversing the direction of the SW sidewalk lane in one or both legs. If the one-way direction of the west leg is towards the intersection (east-bound), a S-W sidewalk left turn can be added.
Theorem 1
Any maximal connected zero-traffic-conflict intersection is equivalent by reflection, rotation and/or arrow reversal operation to one of the nine designs: 2a, 2b, 2c, 2d, 3b, 12a, 12c, 12e and 12 f.
Proof
To demonstrate that this is indeed a full classification, we distinguish between cases according to their sidewalk turning movements. The first level of the classification is whether there are sidewalk turns at all corners or not. The second level of the classification is based on combinations of directions (left or right) of sidewalk turns.
-
Case I
there are sidewalk turning movements at all four corners.
-
A.
All four sidewalk turns are in the same direction. By mirror symmetry we can assume right turns at all corners, i.e. sidewalk turns are S-E; E-N; N-W; and W-S. Traffic in all legs is driving on the right. These are the conditions on regular roads. There are four corresponding maximal ZTC possibilities: two through movements (Fig. 2(a)); two left movements (Fig. 2(b)); through and left movements coming from the same leg (Fig. 2(c)); through and left movements going to the same leg (Fig. 2(d)).
-
B.
Three sidewalk turns are in the same direction and one is in the opposite direction. The legs on both sides of the opposite direction sidewalk turn are one-way, and therefore by Lemma 2 the resulting designs cannot be maximal ZTC. (See Fig. 3(c, d & e) for illustration).
-
C.
There are sidewalk right turns at two neighboring corners and sidewalk left turns at the other two corners. By rotation symmetry we can assume that the sidewalk turns are S-E, E-N, S-W and W-N. There is a one way street, south to north; and two-way traffic on the other approaches, east and west. A maximal design is obtained by adding one turning movement from the following three options: S-N through along the one way street (Fig. 3(b)); E-W through (Fig. 12(a)); or W-E through (Fig. 12(b)). Note that there is mirror symmetry between the last two.
Fig. 12 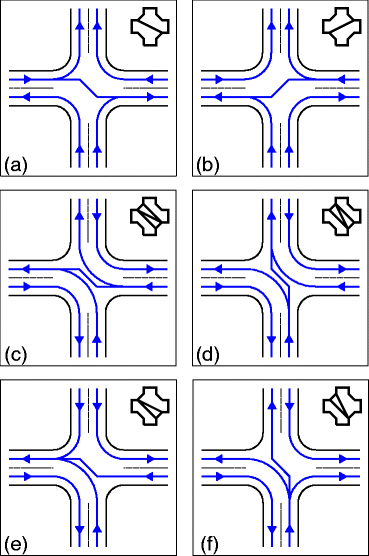
Additional maximal connected zero-traffic-conflict four-leg intersection designs
-
D.
There are sidewalk right turns at two diagonal corners and sidewalk left turns at the other two corners. By rotation symmetry we can assume that the sidewalk turns are S-E, N-E, N-W and E-W, as in design 3a. All legs are one-way, and by Lemma 2 the resulting design cannot be maximal ZTC.

-
Case II
there is a corner without sidewalk turning movement.
If one of the legs of the corner is one-way, we can add a sidewalk turning movement according to the directions of the two-way leg, by allowing if necessary, traffic in the opposite direction of the one-way leg. If the two-way traffic is driving on the same side of the road on both legs, then a sidewalk turn can be added. So, both legs must be two-way, and driving on opposite sides of the road.
-
A.
Traffic along the corner sidewalks travels towards the intersection. Suppose by symmetry that the corner is south-east, so traffic on the south leg traffic travels on the right, and on the east leg traffic travels on the left. Now consider the condition of connectivity, applied to the east side of the south leg with possible connections {S-E, S-N, S-W}, and the south side of the east leg with possible connections {E-S, E-W, E-N}, both travelling towards the intersection. If S-E is permitted, traffic arriving from the east leg is blocked, and the condition of connectivity is violated. If E-S is permitted, traffic arriving from the south leg is blocked, and again the condition of connectivity is violated. S-N and E-W cross each other, so either S-W or E-N must be permitted. By symmetry suppose that S-W is permitted. The only movement that can connect to the south-bound direction on the south leg (driving on the west side) is W-S, so traffic on the west leg travels on the right. This means that W-E crosses S-W, and the only turning movement that can connect to the east-bound traffic on the east leg (driving on the north side) is N-E. There are three permitted movements: W-S, N-E & S-W; and four remaining non-conflicting movements: N-W, E-N, E-W & S-N. If N-W is permitted, the only remaining connection for the west-bound traffic on the east leg is E-W. Otherwise, E-N can be permitted with either S-N or E-W. To summarize, there are three possibilities: a) W-S & N-E & S-W & E-N & S-N (Fig. 12(d)); b) W-S & N-E & S-W & E-N & E-W (Fig. 12(c)); and c) W-S & N-E & S-W & E-W & N-W (Fig. 12(e)).
-
B.
Traffic along the corner sidewalks travels away from the intersection. Suppose by symmetry that the corner is north-west, so on the west leg traffic travels on the right, and on the north leg traffic travels on the left. Most of the analysis is equivalent to the analysis of case A, except that the design in Fig. 12(f) replaces the design in Fig. 12(e).
Theorem 2
All maximal connected zero-conflict-traffic three-leg intersection designs are equivalent to one of the designs shown in Fig. 1(d e or f).
Comment
Figure 1(a and b) allow part of the turning movements in the mirror image of Fig. 1(d), therefore they are not maximal. For example Fig. 1(b) allows NS, NE, ES, while SN could be added without sacrificing NS. Figure 1(c) allows part of the turning movements in Fig. 1(e), i.e. NS, ES, and EN, but not SE, and therefore it is not maximal either.
Proof
By rotation symmetry we can assume that the three leg intersection has north south and east legs, as in Fig. 1. First we show that in a maximal design there will be three sidewalk movements. Suppose by contradiction that there is no sidewalk movements between one pair of legs, for example the north and south legs. By Lemma 1 this means that there is no movement between the north and south legs. Among the remaining four possible turns, S-E, E-S, N-E & E-N, only three can be accommodated without crossing conflicts, leaving either the south or north legs as one-way. The resulting design is not maximal since the direction of traffic closest to the west side of the two-way leg can be extended to the other (one-way) leg, in contradiction to the assumption that there is no movement connecting the north and south legs.
To examine combinations of sidewalk movements according to Lemma 2, note that a north-south sidewalk movement is equivalent to a “right turn,” and a south-north sidewalk movement is equivalent to a “left turn”. If all sidewalk movements are in the same direction, by symmetry we can assume that they are all right turns, leading to the three possible maximal designs shown in Fig. 1(d, e, and f). Otherwise, there are two sidewalk movements in one direction and one opposite direction sidewalk movement. The legs on both sides of the opposite direction sidewalk movements are one-way, and by Lemma 2 the resulting design cannot be maximal ZTC.
Rights and permissions
About this article
Cite this article
Eichler, D., Bar-Gera, H. & Blachman, M. Vortex-Based Zero-Conflict Design of Urban Road Networks. Netw Spat Econ 13, 229–254 (2013). https://doi.org/10.1007/s11067-012-9179-x
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11067-012-9179-x