
Abstract
The paper addresses the fixed-/preassigned-time synchronization of stochastic memristive neural networks (MNNs) with uncertain parameters and mixed delays. Adaptive sliding mode control (ASMC) technology is mainly utilized. First, a proper sliding surface is constructed and the adaptive laws are given. Also, the synchronization control scheme is designed, which can ensure error system to realize fixed-time stability. Second, preassigned-time sliding mode control scheme is mainly provided to realize fast synchronization of MNNs. The presented theoretical methods can guarantee the error system convergence and stability for reaching and sliding mode within preassigned-time. And the synchronization criteria and explicit expression of settling time (ST) are acquired, where ST is not related with initial values and controller parameters but can be predefined perferentially. Finally, the calculation example is offered to interpret the practicability and availability of the innovations in this paper.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Since the memristor was found by Chua [1] and was achieved by HP Laboratory [2], memristive neural networks (MNNs) have acquired much attention for their application superiority in different fields, including associative memory [3], pattern recognition [4] and secure communication [5]. Especially, synchronization of MNNs has become an important field of complex networks and dynamic system. Up to now, many results have been obtained for the deterministic MNNs [6,7,8]. Robust analysis approach was investigated in [6], which realized finite-time synchronization (FTS) of the master–slave delayed MNNs. The article achieved exponential synchronization of MNNs with time-varying delay via the linear feedback control [7]. However, due to the error of modeling and the influence of perturbations, practical systems often exist some uncertain factors, such as unknown parameters and stochastic perturbations. These uncertain factors make the system unstable, chaotic, and even oscillating. Thus, it is very practical to investigate uncertain MNNs. Moreover, time delay affects the synchronization and stability of system due to signal transmission is not instantaneous [9], such as remote control system. And since the existence of parallel paths, distributed delays are also common [10,11,12,13]. The author studied adaptive synchronization of MNNs which include mixed delays and stochastic perturbation [14]. In practice, stochastic perturbations may lead to instability and performance degradation of neural networks. In fields such as secure communication, risk control, and bioinformatics, stochastic neural networks are more suitable for practical applications. Therefore, it is necessary to study the memristor-based stochastic neural networks. This article discusses the asymptotical synchronization for memristor-based multi-layers networks with delays under stochastic noise [15]. However, there exist few results that based on MNNs synchronization with unknown parameters, stochastic perturbations and mixed delays. It is essential to give relevant results.
For uncertain systems, effective control methods can make system run more stable. In recent years, several effective control schemes have been found, containing impulsive control [16], fuzzy control [17], SMC [18, 19] and adaptive control [20, 21], which have been proposed to deal with MNNs synchronization. It should be emphasized that SMC has great anti-interference ability and rapid dynamic response property, which has been widely used in uncertain networks synchronization. For example, the SMC strategy was designed for the discrete-time NNs synchronization, and sufficient conditions are given in [19]. When some parameters of system are unknown or unattainable, the SMC is ineffective. In contrast, ASMC provides a feasible scheme. This control scheme has both the online identification function of adaptive control and the anti-interference property of SMC, and its performance in uncertain system is satisfactory [22,23,24,25]. For example, the researchers [22] concentrated on ASM observer for the stability of uncertain nonlinear systems, and estimated the unknown disturbance in finite time. The multiple chaotic systems synchronization with perturbations is discussed in [23], and the adaptive laws and SM controllers were designed to deal with perturbations. However, above literature rarely consider the synchronization time, which cannot guarantee fast convergence of the error system for MNNs.
Since Kanebkov proposed finite-time stability [26] for fast convergence problem, and many related results subsequently appeared [27,28,29]. In [27], the FTS criterion of delayed NNs is obtained by Lyapunov functions and integral formula method. Liu et al. [28] designed two controllers with saturation function to avoid chattering, which realize bipartite FTS of MNNs. Nevertheless, the ST of FTS is relevant to initial states and the FTS is disabled when the initial values are huge or unknown. To overcome this defect, Polyakov [30] put forward fixed-time stability theory. So it’s not surprising that there are many results about fixed-time synchronization (FXTS) [31,32,33,34,35,36]. For instance, an adaptive pinning control scheme was designed to save resources and achieve the self-regulation function, which ensured FXTS for delayed NNs in [33]. Xiao et al. [34] studyed FXTS of multidimension-valued NNs, and applied spreading Cauchy-Schwarz inequality to design the nonlinear controllers. The problem of improved fixed-time stability for delayed fractional-order systems is studied in [35], and the results are extended to study fractional-order NNs with time-delays in FXTS. Therefore, FXTS is more flexible and has broader application prospects compared with FTS. Through above analysis, it is very interesting to study the FXTS of uncertain MNNs with mixed-delays. But, the ST of FXTS only give a maximum upper bound of stable time, which is often much larger than actual stable time. In order to further accelerate convergence speed of the system, it is urgent to explore an approach to adjust ST directly. To be sure, preassigned-time synchronization (PATS) is not relevant to any initial values and arbitrary parameters, which attracts people’s attention in recent years [37,38,39,40]. The preassigned-time stability of the discontinuous system was discussed, and the new theorem was developed by hyperbolic-tangent function [38]. Hu et al. [40] developed fresh conditions of MNNs PATS and a new controller without linear feedback term, the ST is more precise than [33].
To the best of our knowledge, there are no relevant results concerning FXTS and PATS of MNNs. It is challenging to develop concise and precise estimations on ST. Motivated by the above discussions, we throw light on the FXTS and PATS of MNNs. The contributions are organized as follows.
-
(i)
The FXTS and PATS framework of uncertain MNNs are constructed. The relationships among unknown weight, mixed delays, stochastic perturbations and synchronization capability are discussed. Compared with [20, 21], which contains only unknown parameters, the model designed is more general in this paper.
-
(ii)
An ASMC scheme is proposed to track unknown parameters and solve the mismatched parameters problem, which guarantees the fast convergence of error system.
-
(iii)
Some synchronization criteria of FXTS and PATS are derived. Compared to results about finite-time synchronization of NNs in [20], The obtained ST of FXTS overcome the dependence on initial values. And obtained ST of PATS guarantee the arbitrary setting of ST, then the degree of freedom and practicability of system synchronization are greatly increased.
2 Model Formulations and Preliminaries
Consider the drive system as
where \( p,q=1,2,3,...,n \), \( {x_p}\left( t \right) \) is \( {p_{th}} \) neuron state. \( {f_q}\left( \cdot \right) \) and \( {g_q}\left( \cdot \right) \) are bounded activation functions, and satisfy Lipschitz condition with \( {f_q}\left( 0 \right) = {g_q}\left( 0 \right) = 0 \), where \( \left| {{f_q}\left( \cdot \right) } \right| \le {M_1} \), \( \left| {{g_q}\left( \cdot \right) } \right| \le {M_2} \), \({M_1}> 0,{M_2} > 0 \). \( {{\textbf{a}}_{pq}}\left( \cdot \right) ,{{\textbf{b}}_{pq}}\left( \cdot \right) \) and \({{\textbf{r}}_{pq}}\left( \cdot \right) \) are connection weight coefficients, and \({\textbf{c}_p} > 0 \). \( {\tau (t)} \) is discrete delay and holds \(0 \le \tau \left( t \right) \le m. \) \( h\left( t \right) \) is distributed delay and meets \( 0 \le h\left( t \right) \le d \), where \( m> 0,d > 0 \). \({\chi _{pq}}\left( \cdot \right) \in {R^n} \) is noise intensity function. Complete probability space \( (\Psi ,F,P) \) occures brownian motion \( {w_q}\left( t \right) \). Initial value of (1) is \({x_p}\left( s \right) = {\Omega _p}\left( s \right) = {\left( {{\Omega _1}\left( s \right) ,{\Omega _2}\left( s \right) , \ldots ,{\Omega _p}\left( s \right) } \right) ^T} \in C\left( {\left[ { - \ell ,0} \right] ,{R^n}} \right) ,\ell \mathrm{{ = max}}\left\{ {d,m} \right\} ,\) \({{\textbf{a}}_{pq}}\left( {{x_p}\left( t \right) } \right) ,{{\textbf{b}}_{pq}}\left( {{x_p}\left( t \right) } \right) \) and \({{\textbf{r}}_{pq}}\left( {{x_p}\left( t \right) } \right) \) are given as
where \( {T_{pq}},{{T'}_{pq}},{{T''}_{pq}} \) represent resistances of memristors \( {W_{pq}},{{W'}_{pq}},{{W''}_{pq}} \) respectively. \( sig{n_{pq}} = 1 \) when \( p=q \), otherwise, \( sig{n_{pq}} = -1 \). \( {W_{pq}},{{W'}_{pq}},{{W''}_{pq}} \) represent memristors between \( {f_q}\left( {{x_q}\left( t \right) } \right) \) and \( {{x_p}\left( t \right) } \), \( {g_q}\left( {{x_q}\left( {t - \tau \left( t \right) } \right) } \right) \) and \( {{x_p}\left( t \right) } \), \( \int _{t - h\left( t \right) }^t {{f_q}\left( {{x_q}\left( s \right) } \right) } ds \) and \( {{x_p}\left( t \right) } \) respectively. \( {C_p} \) is capacitor, the \( {x_p}\left( t \right) \) is the \({\mathrm{{C}}_{\mathrm{{p }}}}^\prime s\) voltage. The connection weights are used as

where  are all constants. \( {H_q} \) is a positive constant and \( {H _q} \) represents jump threshold of memristor. The set-valued mappings are described as
are all constants. \( {H_q} \) is a positive constant and \( {H _q} \) represents jump threshold of memristor. The set-valued mappings are described as

where \(\overline{co} \) is convex closure. According to the theory of differential inclusion, (1) is transformed into
where \( K\left[ {{{\textbf{a}}_{pq}}\left( {{x_p}\left( t \right) } \right) } \right] ,K\left[ {{{\textbf{b}}_{pq}}\left( {{x_p}\left( t \right) } \right) } \right] \) and \(K\left[ {{{\textbf{r}}_{pq}}\left( {{x_p}\left( t \right) } \right) } \right] \) represent the convex closures of the sets \(\left[ {{{\textbf{a}}_{pq}}\left( {{x_p}\left( t \right) } \right) } \right] \), \(\left[ {{{\textbf{b}}_{pq}}\left( {{x_p}\left( t \right) } \right) } \right] \), \( \left[ {{{\textbf{r}}_{pq}}\left( {{x_p}\left( t \right) } \right) } \right] \) With \({a_{pq}}\left( {{x_p}\left( t \right) } \right) \in K\left[ {{{\textbf{a}}_{pq}}\left( {{x_p}\left( t \right) } \right) } \right] \), \({b_{pq}}\left( {{x_p}\left( t \right) } \right) \in K\left[ {{{\textbf{b}}_{pq}}\left( {{x_p}\left( t \right) } \right) } \right] \), \({r_{pq}}\left( {{x_p}\left( t \right) } \right) \in K\left[ {{{\textbf{r}}_{pq}}\left( {{x_p}\left( t \right) } \right) } \right] \), the (2) is equivalent to
where \( {{\textbf{a}}_{pq}}\left( \cdot \right) ,{{\textbf{b}}_{pq}}\left( \cdot \right) \) and \({{\textbf{r}}_{pq}}\left( \cdot \right) \) are unkown connection weights.
Assumption 1
\( {\chi _{pq}} =:{R_ + } \times R \times R \rightarrow R \) satisfies Lipschitz condition and linear growth condition with \( {\chi _{pq}}\left( {t,0,0} \right) = 0, \) it has
where \( {\eta _{pq}}> 0,{\mu _{pq}} > 0 \). The response system is described as
where \({{u_p}(t)}\) are suitable adaptive control inputs, \( {{{\hat{c}}}_p}(t),{{{\hat{a}}}_{pq}}(t) \) and \( {{{{\hat{b}}}_{pq}}(t)} \) are tunable weights.
Define the synchronization error as \( {e_p}\left( t \right) = {y_p}\left( t \right) - {x_p}\left( t \right) \), and it yields
where \( {\sigma _{pq}}(t,{e_q}(t),{e_q}(t - {\tau _q}(t))) = {\chi _{pq}}(t,{y_q}(t),{y_q}(t - {\tau _q}(t))) - {\chi _{pq}}(t,{x_q}(t),{x_q}(t - {\tau _q}(t)))\). Consider stochastic nonlinear systems as
where \(\theta (t)\) denotes system state with \(\theta \left( {{t_0}} \right) = {\theta _0}\), \(\Psi \left( \cdot \right) \) and \(\Upsilon \left( \cdot \right) \) are nonlinear continuous function and noise intensity function respectively.
Remark 1
In recent years, the dynamics of memristor-based neural networks have been extensively studied, which have led to many successful applications in a variety of areas, including signal processing, pattern recognition, prediction model, etc. In practice, stochastic perturbations may lead to instability and performance degradation of neural networks. In risk control, oncology, bioinformatics and other related fields, stochastic neural networks are more suitable for practical applications than ordinary neural networks Therefore, it is necessary to study the memristor-based stochastic neural networks. It should be noted that the synchronization problem of stochastic neural networks studied in our paper focuses more on theoretical analysis and does not explore it from a practical application perspective. This will also be one of our important future work. In order to achieve fixed-time stability and preassigned-time stability of error system (5), some definitions and lemmas are taken into account.
Definition 1
[41] Where \( {T_\nu }> 0,{\Gamma _p} > 0 \), for any initial state \( {\theta _0} \) of \( {\theta _0}\left( t \right) \in {R^n} \), there are conditions satisfy: (i) The origin can achieve the globally stochastically finite-time stable. (ii)The expectation of \( {T\left( {{\theta _0},w\left( t \right) } \right) } \) meets
where \( {\Gamma _p} \) denotes the maximum value of the ST.
Definition 2
[20] Define the vector function \( \Phi \left( \sigma \right) \) as
Lemma 1
[42] If the Lyapunov function \( V\left( {t,\theta \left( t \right) } \right) \in {C^{2,1}}:{R^ + } \times {R^n} \rightarrow {R_ + } \) satisfies
then the stochastic system (6) realizes fixed-time stability, and the ST is calculated as
where \( {c_1}> 0,{c_2} > 0 \), \(0< {\phi _1} < 1,{\phi _2} > 1\).
Lemma 2
[39]For (6), if Lyapunov function \( V\left( \cdot \right) \) is a continuous strictly monotonically decreased function and satisfies: (i)\( {T_c} \in \left\{ {{b_1},...,{b_n}} \right\} > 0 \) is a parameter that can be set. (ii)For any \( V\left( \cdot \right) > 0 \) and satisfies
where \(\varpi = 1 + \frac{{{\varphi _2} - 1}}{{1 - {\varphi _1}}},v = \frac{1}{{1 - {\varphi _1}}}\frac{{{2^{\varpi - 1}}}}{{{b_2}^{\frac{1}{\varpi }}\left( {\varpi - 1} \right) }}{b_1}^{\frac{{1 - \varpi }}{\varpi }},\) \(0< {\varphi _1} < 1,{\varphi _2} > 1\), and \( {{b_1}},{{b_2}} \) are positive constants. Then the system will achieve globally preassigned-time stable.
Lemma 3
[20] For any positive constants \({{\textrm{K}_p}}\) and \(0 < {\upsilon _1} \le 1,{\upsilon _2} > 1\), it gets
3 Main Results
In this part, the error system achieves FXT stability and PAT stability by designing the ASMC controller. And sufficient criteria of FXTS and PATS are deduced.
3.1 Fixed-Time Synchronization of Stochastic MNNs
Construct the sliding-mode surface (SMS) as
where \(m> 0,0< {\theta _{\mathrm{{3}}}} < 1,{\theta _4} > 1\). Based on the designed sliding mode control scheme, FXTS of MNNs will be ahieved. Then in order to prove fixed-time accessibility of SMS, consider the control input as
where \( {\beta _p},\beta '_p,{l_p},{k_p},{{k'}_p},m \) are positive constants, \( {\alpha _p}(t) \) is the gain of adaptive controller, \( 0< {\theta _1} < 1,{\theta _2} > 1,\) and \(\omega = {\left( {\left\| {{\hat{C}}(t)} \right\| + {\theta _C}} \right) ^{{\theta _1} + 1}} + {\left( {\left\| {{\hat{C}}(t)} \right\| + {\theta _C}} \right) ^{{\theta _2} + 1}}\). \({\hat{C}}(t) = diag\left\{ {{{{\hat{c}}}_1}(t),{{{\hat{c}}}_1}(t),...,{{{\hat{c}}}_1}(t)} \right\} \in {R^{n \times n}}\) is estimated of C. In order to achieve estimation for unknown weights, the following adaptive laws for weights and controller are given
where \( {\phi _p}> 0,\phi '_p > 0. \)
Remark 2
Due to the error of modeling and the influence of perturbations, practical systems often exist some uncertain factors, such as unknown parameters and stochastic perturbations. SMC has strong anti-interference ability and fast dynamic response characteristics, and has been widely used in uncertain network synchronization. Meanwhile, the adaptive strategy is the powerful tool of identifying unkown parameters and can automatically adjust by different updating laws. The drive system weights are unknown in this paper. Therefore, the weight update laws are constructed to identify the unkown weights of drive system, and controller update law promotes system convergence.
Assumption 2
The matrice C is bounded with \( {\theta _C} > 0 \) and satisfies \(\left\| C \right\| \le {\theta _C}.\)
Based on the adaptive control input (8), the fixed-time synchronization of MNNs is discussed.
Theorem 1
The error system (5) will arrive SMS under controller (8), if the following conditions hold
and the ST can be calculated as
where \( {i_1} = \mathop {\min }\limits _{1 \le p \le n} \left\{ {{\beta _p},{l_p},{k_p},{\phi _p}} \right\} {2^{\frac{{{\theta _1} + 1}}{2}}},{i_2} = {n^{\frac{{1 - {\theta _2}}}{2}}}\mathop {\min }\limits _{1 \le p \le n} \left\{ {{{\beta '}_p},{l_p},{{k'}_p},{{\phi '}_p}} \right\} {2^{\frac{{{\theta _2} + 1}}{2}}},0< {\theta _1} < 1,{\theta _2} > 1. \)
Proof
The Lyapunov function is considered as
where
Based on \( It{\hat{o}} \) formula and Assumption 1, it can deduce that
According to (12)-(15), it has
Using Young’s inequality, one obtains
and
where \({\rho _q}\) and \({\zeta _q}\) are positive Lipschitz constants. With Assumption 2, it yields
Therefore, it obtains
Substituting (17)-(20) into (16), it gains
Further calculation under Theorem 1, the inequality (21) gets
where \( {i_1} = \mathop {\min }\limits _{1 \le p \le n} \left\{ {{\beta _p},{l_p},{k_p},{\phi _p}} \right\} {2^{\frac{{{\theta _1} + 1}}{2}}},{i_2} = {n^{\frac{{1 - {\theta _2}}}{2}}}\mathop {\min }\limits _{1 \le p \le n} \left\{ {{{\beta '}_p},{l_p},{{k'}_p},{{\phi '}_p}} \right\} {2^{\frac{{{\theta _2} + 1}}{2}}},0< {\theta _1} < 1,{\theta _2} > 1. \) The ST is calculated as (11). Next, it is proved that the error on SMS converges to 0 in fixed-time. \(\square \)
Theorem 2
The error system (5) can converge to 0 on the SMS (7). And the \( {T_{\nu 2}} \) is
where \( {m_1}> 0,{m_2}> 0,0< {\theta _3} < 1,{\theta _4} > 1. \) By using the conditions of \( {s_p}(t) = 0,{{\dot{s}}_p}(t) = 0 \), and it follows that
Proof
Lyapunov functional is provided as
The derivation of \( {V\left( t \right) } \) is
where \( {m_1} = m{2^{\frac{{{\theta _3} + 1}}{2}}},{m_2} = m{2^{\frac{{{\theta _4} + 1}}{2}}}{n^{\frac{{1 - {\theta _4}}}{2}}} \). Through the above proof that the error on SMS converges to 0 in fixed-time under adaptive controller,and the ST is shown in (23). \(\square \)
Remark 3
From (7), a first-order SMS is constructed, that is, the integral SMS, which the degree of freedom of sliding variable s is 1. The time evolution of the system state is driven to slide along the SMS and stay on the SMS. In accordance with Theorem 1, the error system slides along the SMS in \( {T_{\nu 1}} \); based on Theorem 2, the error system evolves in a neighborhood around the SMS in \( {T_{\nu 2}} \). Consequently, the total time is \( T = {T_{\nu 1}} + {T_{\nu 2}} \). And it can be known from (11) and (23) that the ST of FXTS is correlated with the controller parameters \({\beta _p},{{\beta '}_p},{l_p},{k_p},{{k'}_p},{\phi _p},{{\phi '}_p}\). When chattering occures, \({\mathop {{\textrm{sign}}}} ( \cdot )\) in the controller (8) can be replaced by \(\frac{{{e_p}\left( t \right) }}{{\left| {{e_p}\left( t \right) } \right| + 0.01}}\).
Remark 4
For [21], the asymptotic synchronization of MNNs is investigated, which ST of asymptotic synchronization may be infinitely long. Compared with FTS in [27, 28], the FXTS can make the system errors tend to 0 faster, which has more practical application value. The ST of FXTS compared to FTS can be adjusted by controller parameters regardless of the system initial values.
Remark 5
Different from [20], which NNs only considered time-delayed and unknown parameters, this paper considers unknown parameters, mixed delays and stochastic perturbations, so the obtained results are more comprehensive and general. In other words, [20] can be regarded as a special case of this paper.
This part discusses the synchronization of MNNs in fixed-time, and the ST can be regulated by parameters. However, the ST that can be set arbitrarily by users is worth studying in the current. Next part will study PATS of MNNs.
3.2 Preassigned-Time Synchronization of Sochastic MNNs
This part presents a novel SMS that guarantee the system achieving PATS.
where \(m> 0,0< {\theta _{\mathrm{{3}}}} < 1,{\theta _4} > 1\). To prove the preassigned-time accessibility of SMS, the adaptive controller is designed as
the controller parameters are mentioned as (8). The adaptive laws \(\mathop {{{{\hat{a}}}_{pq}}}\limits ^ \cdot (t),\mathop {{{{\hat{b}}}_{pq}}}\limits ^ \cdot (t)\) and \(\mathop {{\hat{c}}{}_p}\limits ^ \cdot \left( t \right) \) are consistent with (9), and
where \( {\phi _p}> 0,{\phi '_p} > 0. \)
Based on the controller (28), the following results are derived.
Theorem 3
If the inequalitis (10) hold, the PATS of MNNs can be achieved at preassigned-time \( {T_{c1}}\), and \({v_1}\) satisfy
where \(\varpi = 1 + \frac{{{\theta _2} - 1}}{{1 - {\theta _1}}}\), \( {i_3} = \mathop {\min }\limits _{1 \le p \le n} \left\{ {{\beta _p},{l_p},{k_p},{\phi _p}} \right\} {2^{\frac{{{\theta _1} + 1}}{2}}},{i_4} = {n^{\frac{{1 - {\theta _2}}}{2}}}\mathop {\min }\limits _{1 \le p \le n} \left\{ {{{\beta '}_p},{l_p},{{k'}_p},{{\phi '}_p}} \right\} {2^{\frac{{{\theta _2} + 1}}{2}}},0< {\theta _1} < 1,{\theta _2} > 1. \)
Proof
Consider appropriate Lyapunov function as (12), it yields
where \( {i_3} = \mathop {\min }\limits _{1 \le p \le n} \left\{ {{\beta _p},{l_p},{k_p},{\phi _p}} \right\} {2^{\frac{{{\theta _1} + 1}}{2}}},{i_4} = {n^{\frac{{1 - {\theta _2}}}{2}}}\mathop {\min }\limits _{1 \le p \le n} \left\{ {{{\beta '}_p},{l_p},{{k'}_p},{{\phi '}_p}} \right\} {2^{\frac{{{\theta _2} + 1}}{2}}},0< {\theta _1} < 1,{\theta _2} > 1. \) The above derivation satisfies the condition of lemma 2, and the error reaches SMS at preassigned-time \( {T_{c1}}\) under Theorem 3. Next the following is to prove that the error on SMS converges to 0 at preassigned-time \( {T_{c2}}\).
Theorem 4
The system (5) converges to 0 on the SMS (26) at preassigned-time \( {T_{c2}}\), and \({v_2}\) satisfy
where \(\varpi = 1 + \frac{{{\theta _4} - 1}}{{1 - {\theta _3}}}\), \( 0< {\theta _3} < 1,{\theta _4} > 1. \) According to the condition \( {s_p}(t) = 0,{{\dot{s}}_p}(t) = 0 \), we get
where \({{\dot{e}}_{p}}(t)\) is described as formula (24).
Proof
The following Lyapunov functional is developed
The derivation of \( {V\left( t \right) } \) is calculated in the same way as (26), the following formula is calculated.
where \( {m_3} = m{2^{\frac{{{\theta _3} + 1}}{2}}},{m_4} = m{2^{\frac{{{\theta _4} + 1}}{2}}}{n^{\frac{{1 - {\theta _4}}}{2}}} \). The above proof is derived that the error on SMS converges to 0 at preassigned-time \( {T_{c2}}\) under adaptive controller. \(\square \)
Remark 6
From [27] and [28], the ST of FTS connects with initial values. In addition, the error system cannot converge in finite time, when the condition of large initial values. In cases where the initial values are difficult to obtain, then FXTS can be used. However, compared with the ST that can not guarantee the accuracy in FXTS, the ST of PATS can be set directly. In this literature, when PATS of MNNs is realized, the error system slides along the SMS within preassigned-time \( {T_{c1}}\) and the error system evolves in a neighborhood around the SMS within preassigned-time \( {T_{c2}}\). Compared with FTS and FXTS, \( {T_{c1}}\) and \( {T_{c2}}\) is independent of initial values and controller parameters, which can be set directly. As a result, it is not difficult to conclude the total time \( T = {T_{c1}} + {T_{c2}} \). PATS of MNNs is more practical compared with FXTS from the above.
Remark 7
Some authors have studied the synchronization by using the linear matrix inequality method, where the computational complexity of the problem increases with the increase of the number of decision variables [44]. When multiple types of delays exist at the same time, the state of the system is seriously delayed, which makes it more challenging to achieve synchronization of drive and response systems. Therefore, based on Lyapunov function and inequality technology, the FXTS and PATS problems are studied by designing adaptive state feedback controller. The discrete time delay and distributed time delay compensation terms are introduced into the controller to overcome the inffuence of mixed time delays, and further realize the synchronization of the system. The conditions obtained are easy to verify.

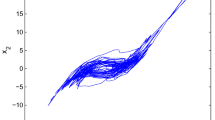
\( {x_1}\left( t \right) \) and \( {y_1}\left( t \right) \) with controller

\( {x_2}\left( t \right) \) and \( {y_2}\left( t \right) \) with controller

The trajectories of FXTS errors of MNNs with controller

The trajectories of FXTS SMS

The trajectories of PATS errors of MNNs with controller
4 Numerical Examples
For drive system and response system, we simplify connection weights as
where

The trajectories of PATS SMS

The trajectories of adaptive laws

The trajectories of adaptive laws

The trajectories of adaptive laws

The trajectories of adaptive laws of the controller
The switching threshold is \( {H _q} = 1.\) The delays are \( {\tau _1}\left( t \right) = {\tau _2}\left( t \right) = \sin \left( t \right) \) and \({h_1}\left( t \right) = {h_2}\left( t \right) = \frac{{{e^t}}}{{{e^t} + 1}}. \)
The activation functions are
The stochastic perturbation is \({\chi _{11}}(t,{x_1}(t),{x_1}(t - {\tau _1}(t))) = {\chi _{21}}(t,{x_1}(t),{x_1}(t - {\tau _1}(t))) = \sin \left( {{x_1}(t)} \right) + 0.5{x_1}\left( {t - {\tau _1}(t)} \right) ,{\chi _{12}}(t,{x_2}(t),{x_2}(t - {\tau _2}(t))) = {\chi _{22}}(t,{x_2}(t),{x_2}(t - {\tau _2}(t))) = 0.5\sin \left( {{x_2}(t)} \right) + 0.7{x_2}\left( {t - {\tau _2}(t)} \right) . \) The initial values are \( {x_0} = \left[ { 6,- 8} \right] ,{y_0} = \left[ { - 10,13} \right] . \)
To achieve stochastic MNNs FXTS, the parameters are choosed as \( {\rho _1} = {\rho _2} = 1,{\zeta _1} = {\zeta _2} = 1.5,{c_1}\mathrm{{ = }}{c_2}\mathrm{{ = 1}}, {M_1} = {M_2} = 1,m = 1,{\mu _{11}} = {\mu _{12}} = {\mu _{21}} = {\mu _{22}} = 1,{\eta _{11}} = {\eta _{12}} = {\eta _{21}} = {\eta _{22}} = 1. \) And controller parameters are set as \( {\varepsilon _1} \ge 1.55,{\varepsilon _2} \ge 2.52,{\gamma _1} \ge 6,{\gamma _2} \ge 9.4,{\lambda _1} \ge 21.35,{\lambda _2} \ge 22.175,{\delta _1} \ge 15.45,{\delta _2} \ge 15.1. \) Thus, the controller parameters \( {u_p}\left( t \right) \) can be set as \( {\varepsilon _1} = 1.55,{\varepsilon _2} = 2.52,{\gamma _1} = 6,{\gamma _2} = 9.4,{\lambda _1} = 21.35,{\lambda _2} = 22.175,{\delta _1} = 15.45,{\delta _2} = 15.1.\) Furthermore, other parameters can be choosen as \( {\beta _1} = {\beta _2} = 1,{{\beta '}_1} = {{\beta '}_2} = 1.5,{l_1} = {l_2} = 0.15,{k_1} = {k_2} = 1,{{k'}_1} = {{k'}_2} = 1.5,q = 6,{\phi _1} = {\phi _2} = 3,{{\phi '}_1} = {{\phi '}_2} = 3,{\theta _1} = 0.25,{\theta _2} = 1.2,{\theta _3} = 0.5,{\theta _4} = 2.\) Based on above values, the upper bound of ST is about 1.4s. The state curves of \(x_1(t)\) and \(y_1(t)\), \(x_2(t)\) and \(y_2(t)\) finally reach consensus from Figs. 1 and 2. And Fig. 3 indicates the errors converge to 0. From Fig. 4, the SMS tends to be stable. Thus, the theoretical result is effective. However, \({T_{\nu 1}} + {T_{\nu 2}}=25.5s\) is obtained by calculating from (11) and (22), the system synchronization takes at least 25.5s in practice, which means the practical ST is much larger than the theoretical ST. Therefore, in order to realize the fast convergence of the system, it is necessary to investigate PATS of MNNS.
Based on same parameters as FXTS, we set \({T_{c1}} = 0.7s,{T_{c2}} = 0.7s\). As shown in Fig. 5, the errors converge to 0 at preassigned time 1.4s. The ST in PATS is the set value, which is not affected by any parameters. The SMS is shown in Fig. 6. It is not hard to see from Fig. 7 to Fig. 10 that MNNs can implement PATS with adaptive laws of the controller. Constructing weight update laws to identify unknown weights of drive systems. It indicates that the proposed ASMC scheme is effective through above description.
5 Conclusion
The FXTS and PATS of stochastic MNNs is considered in this paper. The influence of mixed delays, stochastic perturbations and unknown parameters are taken into account of MNNs. The adaptive controller and SMS are designed to deal with the uncertainties. Some sufficient conditions and ST of FXTS and PATS are deduced by calculation. The simulation example indicates the applicability through the developed scheme. Event-triggered control (ETC) is an economical control method, which can decrease unnecessary traffic over the network and reduce computational cost. Meanwhile, the fractional-order MNNs (FMNNs) are also derived much attention in synchronization and stability [43]. In addition, in order to achieve the security of information transmission, image encryption has become an important application. Therefore, the synchronization of FMNNs via ETC and its application in image encryption will be our main research direction in the future.
References
Chua L (1971) Memristor-the missing circuit element. IEEE Trans Circuit Theory 18(5):507–519
Strukov DB, Snider GS, Stewart DR et al (2008) The missing memristor found. Nature 453(7191):80–83
Tan Z, Ali MK (2001) Associative memory using synchronization in a chaotic neural network. Int J Mod Phys C 12(01):19–29
Zhang Y, Cui M, Shen L et al (2019) Memristive quantized neural networks: a novel approach to accelerate deep learning on-chip. IEEE Trans Cybern 51(4):1875–1887
Shanmugam L, Mani P, Rajan R et al (2018) Adaptive synchronization of reaction-diffusion neural networks and its application to secure communication. IEEE Trans Cybern 50(3):911–922
Yang X, Ho DWC (2015) Synchronization of delayed memristive neural networks: Robust analysis approach. IEEE Trans Cybern 46(12):3377–3387
Abdurahman A, Jiang H (2016) New results on exponential synchronization of memristor-based neural networks with discontinuous neuron activations. Neural Netw 84:161–171
Li R, Gao X, Cao J (2019) Exponential synchronization of stochastic memristive neural networks with time-varying delays. Neural Process Lett 50(1):459–475
Aouiti C, Bessifi M (2021) Finite-time and fixed-time synchronization of fuzzy clifford-valued cohen-grossberg neural networks with discontinuous activations and time-varying delays. Int J Adapt Control Signal Process 35(12):2499–2520
Liu Y, Zhang G, Hu J (2023) Fixed-time anti-synchronization and preassigned-time synchronization of discontinuous fuzzy inertial neural networks with bounded distributed time-varying delays. Neural Process Lett 55:3333–3353. https://doi.org/10.1007/s11063-022-11011-4
Wang L, Zeng Z, Ge MF et al (2018) Global stabilization analysis of inertial memristive recurrent neural networks with discrete and distributed delays. Neural Netw 105:65–74
Luo Y, Wang Z, Wei G et al (2016) Robust \( H\infty \) filtering for a class of two-dimensional uncertain fuzzy systems with randomly occurring mixed delays. IEEE Trans Fuzzy Syst 25(1):70–83
Aouiti C, Jallouli H (2022) New results on stabilization of complex-valued second-order memristive neural networks with mixed delays and discontinuous activations functions. Comput Appl Math 41(8):423
Song Y, Sun W (2017) Adaptive synchronization of stochastic memristor-based neural networks with mixed delays. Neural Process Lett 46(3):969–990
Xiang JL, Ren JW, Tan MC (2022) Stability analysis for memristor-based stochastic multi-layer neural networks with coupling disturbance. Chaos, Solitons & Fractals 165(1):112771
Hu C, Jiang H, Teng Z (2009) Impulsive control and synchronization for delayed neural networks with reaction-diffusion terms. IEEE Trans Neural Networks 21(1):67–81
Wu ZG, Shi P, Su H et al (2013) Sampled-data fuzzy control of chaotic systems based on a T-S fuzzy model. IEEE Trans Fuzzy Syst 22(1):153–163
Ding S, Wang J, Zheng WX (2015) Second-order sliding mode control for nonlinear uncertain systems bounded by positive functions. IEEE Trans Industr Electron 62(9):5899–5909
Sun B, Cao Y, Guo Z et al (2020) Synchronization of discrete-time recurrent neural networks with time-varying delays via quantized sliding mode control. Appl Math Comput 375:125093
Li S, Peng X, Tang Y et al (2018) Finite-time synchronization of time-delayed neural networks with unknown parameters via adaptive control. Neurocomputing 308:65–74
Yang Z, Luo B, Liu D et al (2017) Adaptive synchronization of delayed memristive neural networks with unknown parameters. IEEE Trans Syst Man Cybern Syst 50(2):539–549
Rabiee H, Ataei M, Ekramian M (2019) Continuous nonsingular terminal sliding mode control based on adaptive sliding mode disturbance observer for uncertain nonlinear systems. Automatica 109:108515
Chen X, Park JH, Cao J et al (2017) Sliding mode synchronization of multiple chaotic systems with uncertainties and disturbances. Appl Math Comput 308:161–173
Li H, Shi P, Yao D et al (2016) Observer-based adaptive sliding mode control for nonlinear markovian jump systems. Automatica 64:133–142
Xu W, Qu S, Zhao L et al (2020) An improved adaptive sliding mode observer for middle-and high-speed rotor tracking. IEEE Trans Power Electron 36(1):1043–1053
Kamenkov G (1953) On stability of motion over a finite interval of time. J Appl Math Mech 17(2):529–540
Zhang Z, Cao J (2018) Novel finite-time synchronization criteria for inertial neural networks with time delays via integral inequality method. IEEE Trans Neural Netw Learn Syst 30(5):1476–1485
Chang Q, Park JH, Yang Y (2022) The optimization of control parameters: finite-time bipartite synchronization of memristive neural networks with multiple time delays via saturation function. IEEE Trans Neural Netw Learn Syst. https://doi.org/10.1109/TNNLS.2022.3146832
Wang JL, Wang Q, Wu HN et al (2020) Finite-time output synchronization and \( H\infty \) output synchronization of coupled neural networks with multiple output couplings. IEEE Trans Cybern. https://doi.org/10.1109/TCYB.2020.2964592
Polyakov A (2011) Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans Autom Control 57(8):2106–2110
Aouiti C, Bessifi M (2022) Finite-time and fixed-time sliding mode control for discontinuous nonidentical recurrent neural networks with time-varying delays. Int J Robust Nonlinear Control 32(3):1194–1208
Aouiti C, Bessifi M (2021) Sliding mode control for finite-time and fixed-time synchronization of delayed complex-valued recurrent neural networks with discontinuous activation functions and nonidentical parameters. Eur J Control 59:109–122
Zhang Z, Wei X, Wang S et al (2022) Fixed-time pinning common synchronization and adaptive synchronization for delayed quaternion-valued neural networks. IEEE Trans Neural Netw Learn Syst. https://doi.org/10.1109/TNNLS.2022.3189625
Xiao J, Cheng J, Shi K et al (2021) A general approach to fixed-time synchronization problem for fractional-order multidimension-valued fuzzy neural networks based on memristor. IEEE Trans Fuzzy Syst 30(4):968–977
Udhayakumar K, Rihan FA, Rakkiyappan R et al (2022) New fixed-time stability theorems for delayed fractional-order systems and applications. IEEE Access 10:63230–63244. https://doi.org/10.1109/ACCESS.2022.3183149
Udhayakumar K, Shanmugasundaram S, Janani K et al (2022) Fixed-time synchronization of delayed impulsive inertial neural networks with discontinuous activation functions via indefinite LKF method. J Franklin Inst 359(2):1361–1384
Gan Q, Li L, Yang J et al (2022) Improved results on fixed-/preassigned-time synchronization for memristive complex-valued neural networks. IEEE Trans Neural Netw Learn Syst 33(10):5542–5556
Cai Z, Huang L, Wang Z (2023) Particular functions-based preassigned-time stability of discontinuous system: novel control scheme for fuzzy neural networks. IEEE Trans Fuzzy Syst 31(3):1020–1030
Chen C, Mi L, Liu Z et al (2021) Predefined-time synchronization of competitive neural networks. Neural Netw 142:492–499
Hu C, He H, Jiang H (2020) Fixed/preassigned-time synchronization of complex networks via improving fixed-time stability. IEEE Trans Cybern 51(6):2882–2892
Yu J, Yu S, Li J et al (2019) Fixed-time stability theorem of stochastic nonlinear systems. Int J Control 92(9):2194–2200
Ren H, Peng Z, Gu Y (2020) Fixed-time synchronization of stochastic memristor-based neural networks with adaptive control. Neural Netw 130:165–175
Udhayakumar K, Rihan FA, Rakkiyappan R et al (2022) Fractional-order discontinuous systems with indefinite LKFs: an application to fractional-order neural networks with time delays. Neural Netw 145:319–330
Liu D, Zhu S, Ye E (2017) Synchronization stability of memristor-based complex-valued neural networks with time delays. Neural Netw 96:115–127
Acknowledgements
This work was supported in part by the National Natural Science Foundation of China, under grants 62173175, 61877033,and in part by Talent Introduction and Cultivation Plan for Youth Innovation of Universities in Shandong Province. The University-Industry Collaborative Education Program (Grant No. 201801256007), and the Horizontal Scientific Research Project of Linyi University under (Grant Nos. HX180050, HX2000032).
Author information
Authors and Affiliations
Contributions
Conceptualization, J.G. and X.C.; methodology, J.G., C.W. and T.J.; software, J.G. and T.J.; investigation, J.G., T.J., C.W.and J.Q.; writing-original draft preparation, J.G.; funding acquisition, X.C. and C.W. All authors have read and agreed to the published version of the manuscript.
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare no Conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Gao, J., Chen, X., Qiu, J. et al. Adaptive Sliding Mode Fixed-/Preassigned-Time Synchronization of Stochastic Memristive Neural Networks with Mixed-Delays. Neural Process Lett 56, 205 (2024). https://doi.org/10.1007/s11063-024-11669-y
Accepted:
Published:
DOI: https://doi.org/10.1007/s11063-024-11669-y