
Abstract
In this paper, the fixed-time pinning synchronization problem of an intermittently coupled complex network is investigated. An intermittently coupled complex network with delay is presented for the first time. A new fixed-time stability lemma is developed, which is less conservative than the existing results. A more economical controller is designed under intermittent pinning control strategy. Sufficient conditions are developed to realize fixed-time synchronization. Numerical simulations are conducted to verify the effectiveness and feasibility of the obtained results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
During the last decades, complex networks have been employed to model multitudinous real natural and artificial systems, such as biological network [1], neural network [2], scientific network [3], communication network [4], etc. The dynamical behaviors of complex network mainly contain structural identification [5], diffusion [6], consensus [7], and synchronization [8]. Among them, the network synchronization has been massively researched by numerous scholars because of its precise interpretation of diverse natural phenomena and numerous potential applications in practical systems.
In fact, it is difficult for complex networks to realize self-synchronization through the coupling among network nodes. Fortunately, scholars proposed many productive control methods to reach synchronization, such as impulse control [9, 10], adaptive control [11, 12], feedback control [8, 13] and so on [14,15,16,17,18,19]. Since real-world complex systems typically involve massive nodes and edges, it is a natural idea to decrease the number of controlled nodes to avoid controlling excessive nodes. Pinning control can apply some local feedback input to a fraction of nodes, and the state of other nodes is changed through the interaction among nodes. There are plenty of research achievements [20,21,22,23] in this field, and it has received widespread application.
In the above control strategies, control actions are continuous, which may be infeasible in some practical systems with finite transmission bandwidth. In order to overcome this defectiveness, discontinuous control methods are produced. Particularly, intermittent control is classified as a discontinuous control strategy. It was first proposed by Zochowski in 2000 [24] and has already got close concern due to its low control cost and extensive application in engineering. A control period of intermittent control strategy is decomposed into rest time and work time. That is to say, it is deactivated during the rest time and activated during work time. However, it is conservative and unrealistic for periodicity intermittent control. Aperiodically intermittent strategy has broader applications due to its handy implementation. For instance, the intermittent control of wind power generation is obviously aperiodic [25]. Utilizing aperiodically intermittent control strategies, numerous achievements are obtained about synchronization in complex networks [26,27,28].
It is noted that the above-proposed results are concerning on the asymptotic or exponential synchronization, in which the complex networks achieve synchronization in infinite horizon. In fact, the dynamical networks of practical engineering need to synchronize in a finite time [29]. Together with the faster convergence speed, interference suppression, and strong robustness, finite-time synchronization became popular. Nevertheless, the initial conditions of the considered systems are always not finite or known in advance, so the expected setting time could not be estimated. Under this circumstance, fixed-time synchronization [23, 30, 31] have been introduced to address the above problem, which can promise that settling time is not relevant to any incipient value. By employing different controllers [32], Xu Yuhua studied the fixed-time synchronization of complex systems. In [33], the mixed stochastic complex network with delay realized fixed-time synchronization by the proposed intermittent controller.
However, most intermittent controllers can essentially be regarded as semi-intermittent control strategies in the proposes of achieving fixed-time synchronization, in which a part of the controller must be activated constantly, such as the linear control term. The scheme of semi-intermittent control is inappropriate in the system of signal interruption. In [34,35,36,37], the authors put forward a complete intermittent controller and achieved finite-time synchronization. Recently, complete intermittent controllers were used in quaternion-valued neural networks [36], complex-valued networks [37], and other kinds of systems to realize finite-time synchronization. Nevertheless, it will be difficult to solve the issues of fixed-time synchronization by the complete intermittent control because fixed-time control would involve sophisticated nonlinear analysis. Fortunately, a complete feasible intermittent controller was devised to reach fixed-time synchronization in [38].
Nevertheless, it is noted that the above-mentioned results are about continuously coupled networks. There are interferences such as delay, noise, and so on in the application of the network. Different components in the system may not always be connected, resulting in intermittent coupling between network nodes, that is, the topology of the network is dynamically changing. As discontinuous coupling networks, pulse-coupled networks [39] were introduced into the study of complex networks in 2008, in which coupling exists only in isolated moments and at other times, nodes are considered not interconnected. In addition to transient information communication, there is also intermittent information communication between different components. For example, certain multi-agent systems are required to exchange information within a predetermined time frame, such as memory resistor-based circuits. And in some multi-agent systems, each agent only shares the information with other agents on some disconnected time spans due to the limitation of sensing ranges, communication obstacles and equipment failures. Figure 1 depicts the intermittent coupling mechanism in the presented system: for any time span \((t_{2k} ,t_{2k + 2} ]\), \((t_{2k} ,t_{2k + 1} ]\) is the coupling time; and \((t_{2k + 1} ,t_{2k + 2} ]\) is the decoupling time. There is interaction among neighbors in communication or coupling time; in decoupling time, the communication among nodes is disappearing. In contrast with continuous coupling networks, the decoupling time of intermittent coupling is beneficial for the cooperation and communication of different nodes. Different from pulse coupled networks, information sharing among nodes occurs throughout all the coupling time interval, instead of at certain discrete time points. Nevertheless, there are few achievements about intermittently coupled networks. In intermittently coupled complex networks, Hu considered synchronization by using an adaptive controller [40, 41]. It is certainly worth exploring the fixed-time synchronization problems in an intermittently coupled network.

The sketch of simplified intermittent coupling
Based on the objectivity of intermittent coupling and the differences with continuous or impulsive coupling, there are the following interesting and meaningful challenges: How to model intermittently coupled dynamical networks? How to design a complete intermittent and economical controller to achieve fixed-time synchronization for intermittently coupled networks? Unfortunately, there seem to be very few reported results at present to explore these challenging problems of intermittently coupled dynamical networks.
Inspired by the aforementioned analysis, we study the fixed-time pinning synchronization problem of an intermittently coupled complex network. The highlights are primarily captured in the following three folds:
-
(1)
Different from traditional continuously coupled complex network [30, 31, 36], an intermittently coupled dynamical network with time-varying delay is constructed in this paper. An index function \(\delta_{k} (t)\) is introduced to describe the discontinuities of coupling between nodes.
-
(2)
A new fixed-time stability lemma with complete aperiodically intermittent characteristic is proposed. The settling time is irrelevant to the initial values of our network systems and has superiority in increasing convergence speed and reducing convergence time than existing results.
-
(3)
An economical intermittent controller is proposed to reach fixed-time synchronization. A function \(sig( \cdot )\) is introduced to simplify the controller and the pinning method is considered to avoid imposing controllers to all node, which can reduce more control costs.
Notations: The set of nonnegative integers are represented by \(N_{ + }\), \(R^{n}\) and \(R^{n \times m}\) stand for \({\text{n}}\)-dimensional real column vector space and \(n \times m\) real matrices, individually. In describes unit matrix with n dimensions. \(\lambda_{\min } (A)\) is appointed to be the minimum eigenvalue of \(A \in R^{n \times m}\). \(\left\| x \right\|\) denotes the 2-norm of \(x \in R^{n}\). \({\text{diag}}\{ c_{1} ,c_{2} ,...,c_{n} \}\) describes the diagonal matrix, where ci denotes the \(i\) th diagonal element. Symbol \(\otimes\) denotes Kronecker product. \(C([ - \tau ,0],R^{n} )\) means continuous function space.
2 Model Description and Preliminaries
Considering a kind of intermittently coupled complex network, it can be depicted by
where \(x_{i} = (x_{i1} (t),x_{i2} (t),x_{i3} (t)\;...,x_{in} (t))^{T} \in R^{n}\) is the state vectors, nonlinear vector function \(f:R^{ + } \times R^{n} \times R^{n} \to R^{n}\) represents the node dynamics, time-varying function \(d(t)\) is time-varying delay appearing inside the dynamical nodes and meets \(0 \le d(t) \le d\), \(c > 0\) represents the coupling weight. \(B = [b_{ij} ] \in R^{N \times N}\) denotes weighted adjacency matrix. It satisfies: for \(i \ne j\), assume the \({\text{j}}\) th and \({\text{i}}\) th node are connect by an edge, it establishes \(b_{ij} = b_{ji} > 0\), or else, \(b_{ij} = b_{ji} = 0\); for \(i = j\), it establishes \(b_{ii} = 0\). \(u_{i} (t)\) is the controller for the \({\text{i}}\) th node. \(L = [l_{ij} ] \in R^{N \times N}\) is the corresponding Laplacian matrix, which is established by \(l_{ii} = \sum\nolimits_{j = 1,j \ne i}^{N} {b_{ij} }\), and \(l_{ij} = - b_{ij} (i \ne j)\).
The index function \(\delta_{k} (t)\) is defined as
Remark 1
The numerous excellent results of network synchronization are extensively concentrated on continuous coupling networks. This article investigates a new complex network with discontinuous coupling, namely intermittent coupling [40, 41]. The discontinuities of coupling between nodes are represented by the index function \(\delta_{k} (t)\). When \(\delta_{k} (t) = 1\), there are coupling among nodes, while \(\delta_{k} (t) = 0\), the coupling among nodes disappears. Moreover, \([t_{2k} ,t_{2k + 1} )\) and \([t_{2k + 1} ,t_{2k + 2} )\) are used to represent the time interval instead of \([t_{k} ,s_{k} )\) or \([s_{k} ,t_{k + 1} )\) ( in the time span \([t_{k} ,t_{k + 1} )\), \([t_{k} ,s_{k} )\) is the work time and \([s_{k} ,t_{k + 1} )\) is the rest time). The main purpose is that it will make the expression for setting time solutions more concise.
Accordingly, the isolated node performs the following dynamics.
in which \(s(t) = (s_{1} (t)\;s_{2} (t)\;...\;s_{n} (t))^{T} \in R^{n}\).
The error system is defined to be \(e_{i} (t) = x_{i} (t) - s(t)\), then we have
in which \(\overline{f}(t,e_{i} (t),e_{i} (t - d(t))) = f(t,x_{i} (t),x_{i} (t - d(t))) - f(t,s(t),s(t - d(t)))\).
Definition 1
In our intermittently coupled complex network, if there can find a setting time Tf, which meets \(\mathop {\lim }\limits_{{t \to T_{f} }} \left\| {e_{i} (t)} \right\| = 0\) and \(e_{i} (t) = 0\), for \(\forall t \ge T_{f}\), where \(T_{f} \le T_{\max }\), and regardless of the initial conditions of (1) and (3), \(T_{\max }\) is not dependent on the incipient values in the system, then the fixed-time synchronization is achieved.
Assumption 1
For vector function \( y_{1} (t),y{\ominus }_{2} (t) \in R^{n} \), when \(t \in [0, + \infty )\), there exist.
in which both of \(\chi\), \(\gamma\) are known positive constant.
Assumption 2
The time-delay function \(d(t)\) conforms to \(\dot{d}(t) \le \tilde{d} < 1\).
Assumption 3
[38] In the pinning scheme, the isolated system can reach any nodes of network (1).
In order to determine how many nodes are pinned, a matrix \(\ell = diag\{ \ell_{1} ,\ell_{2} ,...,\ell_{n} \}\) is introduced, in which the element is defined as: if the ith node is pinned, \(\ell_{i} > 0\); otherwise \(\ell_{i} = 0\). If Assumption 3 holds, \(\Gamma_{\ell } = L + \ell\) is positive-definite matrix, and we have \(\lambda_{\min } (\Gamma_{\ell } ) > 0\).
To present the controller more concisely, a new function \(w_{i} (t)\) is introduced as:
Then, the compact form of Eq. (5) is
in which \(e(t) = [e_{1}^{T} (t)\;e_{2}^{T} (t)\;...\;e_{N}^{T} (t)]^{T}\) and \(w(t) = [w_{1}^{T} (t)\;w_{2}^{T} (t)\;...\;w_{N}^{T} (t)]^{T}\).
For intermittently coupled network (1), a complete intermittent pinning controller is designed in the below way:
where \(\mu = r + sig(e^{T} (t)(\Gamma_{\ell } \otimes I_{n} )e(t) + \frac{\zeta }{{1 - \tilde{d}}}\int_{t - d(t)}^{t} {e^{T} (s)} (\Gamma_{\ell } \otimes I_{n} )e(s)ds - 1)\), and \(1 < r < 2\). c, \(\alpha\), \(\tilde{d}\) and \(\zeta\) are all positive constants. Moreover, \(\alpha\) is a tunable parameter, \(sig^{\mu } (w_{i} (t)) = (sig^{\mu } (w_{i1} (t)),...,sig^{\mu } (w_{in} (t)))^{T}\), and \(sig^{\mu } (w_{ij} (t)) = sig(w_{ij} (t))\left| {w_{ij} (t)} \right|^{\mu }\).
Remark 2
To realize fixed-time stability, the authors in [38] proposed the following controller:
There are four parts within working intervals: (1) the first part \(- c\ell_{i} e_{i} (t)\) stands for linear feedback term to satisfy Lyapunov stability; (2) the second part \(- c(\frac{\zeta }{{1 - \tilde{d}}}\int_{t - d(t)}^{t} {w_{i}^{T} (s)w_{i} (s)ds} )\frac{{w_{i} (t)}}{{\left\| {w_{i} (t)} \right\|^{2} }}\) is introduced to offset the impact from time delay; (3) the third part \(- \alpha_{1} sig^{{p_{1} }} (w_{i} (t))\) \(- \alpha_{1} (\frac{\zeta }{{1 - \tilde{d}}}\int_{t - d(t)}^{t} {w_{i}^{T} (s)w_{i} (s)ds} )^{{\frac{{p_{1} + 1}}{2}}} \frac{{w_{i} (t)}}{{\left\| {w_{i} (t)} \right\|^{2} }}\) is considered to drive synchronization error \(e_{i} (t)\) from 1 to 0; and (4) the last part \(- \alpha_{2} sig^{{p_{2} }} (w_{i} (t)) - \alpha_{2} (\frac{\zeta }{{1 - \tilde{d}}}\int_{t - d(t)}^{t} {w_{i}^{T} (s)w_{i} (s)ds} )^{{\frac{{p_{2} + 1}}{2}}} \frac{{w_{i} (t)}}{{\left\| {w_{i} (t)} \right\|^{2} }}\) can help ei(t) reach to 1, when \(e_{i} (t) > 1\). From (7), when \(t \in \left[ {t_{2k} ,t_{2k + 1} } \right)\), the controller is rewritten as: \(- c\ell_{i} e_{i} (t) - c(\frac{\zeta }{{1 - \tilde{d}}}\int_{t - d(t)}^{t} {w_{i}^{T} (s)w_{i} (s)ds} )\frac{{w_{i} (t)}}{{\left\| {w_{i} (t)} \right\|^{2} }} - \alpha sig^{\mu } (w_{i} (t)) - \alpha (\frac{\zeta }{{1 - \tilde{d}}}\int_{t - d(t)}^{t} {w_{i}^{T} (s)w_{i} (s)ds} )^{{\frac{\mu + 1}{2}}} \frac{{w_{i} (t)}}{{\left\| {w_{i} (t)} \right\|^{2} }}\). When \(e^{T} (t)(\Gamma_{\ell } \otimes I_{n} )e(t) + \frac{\zeta }{{1 - \tilde{d}}}\int_{t - d(t)}^{t} {e^{T} (s)} (\Gamma_{\ell } \otimes I_{n} )e(s)ds > 1\), it is known that \(sig( \cdot ) = 1\), and \(\mu = r + 1 > 1\), it can help \(e_{i} (t)\) reach to 1; when \(e^{T} (t)(\Gamma_{\ell } \otimes I_{n} )e(t) + \frac{\zeta }{{1 - \tilde{d}}}\int_{t - d(t)}^{t} {e^{T} (s)} (\Gamma_{\ell } \otimes I_{n} )e(s)ds\) \(< 1\), it implies \(sig( \cdot ) = - 1\), and \(0 < \mu = r - 1 < 1\), it can help ei(t) from 1 to 0. It can be intuitively known that the proposed controller has fewer terms and is simpler than (8). Compared with the economic controller proposed in [30, 31], on the one hand, the developed controller in this paper is designed to be intermittent one; on the other hand, the pinning control method is considered in the controller (7), which can avoid imposing controllers to all nodes. In other words, the controller (7) can be regarded as a more economic controller.
Remark 3
In this paper, the intermittent controller (7) is constructed in complete intermittent way. It is different from semi-intermittent controller [15, 33], in which the linear feedback term is added when \(t \in [t_{2k} ,\;t_{2k + 2} )\). This severely restricts their application in practical. However, the proposed controller (7) only appears in the work interval and dissipates during the rest interval. Therefore, this intermittent controller is not only more advantageous for practical application, but also more cost-effective for control implementation.
Based on the aforementioned substance, we rewrite the error system(4) by :
where \(F(t,e(t),e(t - d(t))) = [\overline{f}^{T} (t,e_{1} (t),e_{1} (t - d(t))),...,\overline{f}^{T} (t,e_{N} (t),e_{N} (t - d(t)))]\), \(\Omega = [\Omega _{1}^{T} ,\Omega _{2}^{T} ,...,\Omega _{N}^{T} ]^{T}\), \( {\mho } = [{\mho }_{1}^{T} ,{\mho }_{2}^{T} ,...,{\mho }_{N}^{T} ]^{T} \), \( {\Omega }_{i} = \left( {\frac{\zeta }{{1 - \tilde{d}}}\int_{{t - d(t)}}^{t} {w_{i}^{T} (s)w_{i} (s)ds} } \right)\frac{{w_{i} (t)}}{{\left\| {w_{i} (t)} \right\|^{2} }} \), \( {\mho }_{i} = (\frac{\zeta }{{1 - \tilde{d}}}\int_{{t - d(t)}}^{t} {w_{i}^{T} (s)} w_{i} (s)ds)^{{\frac{{\mu + 1}}{2}}} \frac{{w_{i} (t)}}{{\left\| {w_{i} (t)} \right\|^{2} }} \) and \( sig^{\mu } (w(t)) = [(sig^{\mu } (w_{1} (t)))^{T} ,...,(sig^{\mu } (w_{n} (t)))^{T} ]^{T} \).
Lemma 1
[38] In an undirected communication topology, for Laplacian matrix \({\mathcal{L}} \in R^{N \times N}\), one has.
\(\Xi^{T} ({\mathcal{L}} \otimes I_{N} )\Delta = \frac{1}{2}\sum\limits_{i = 1}^{N} {\sum\limits_{j = 1}^{N} {\psi_{ij} (\Xi_{i} - \Xi_{j} )^{T} (\Delta_{i} - \Delta_{j} )} }\),
In which \(\Xi = [\Xi_{1}^{T} ,\Xi_{2}^{T} ,..,\Xi_{N}^{T} ]^{T} \in R^{nN}\), \(\Delta = [\Delta_{1}^{T} ,\Delta_{2}^{T} ,..,\Delta_{N}^{T} ]^{T} \in R^{nN}\).
Lemma 2
[42] For vector \(\kappa \in R^{nl}\) and any positive semi-definite matrix \(S \in R^{l \times l}\), we have.
where \({\mathcal{P}} \in R^{n \times n}\) and \({\mathcal{Q}} \in R^{n \times n}\) should be symmetric matrix and positive definite matrix, respectively.
Lemma 3
[31] Let \(\omega_{1} ,\omega_{2} ,...,\omega_{i} \ge 0\). Then, for \(0 < r_{1} < 1\) and \(r_{2} > 1\),
\(\sum\limits_{i = 1}^{n} {\omega_{i}^{{r_{1} }} } \ge (\sum\limits_{i = 1}^{n} {\omega_{i} } )^{{r_{1} }}\), \(\sum\limits_{i = 1}^{n} {\omega_{i}^{{r_{2} }} } \ge n^{{1 - r_{2} }} (\sum\limits_{i = 1}^{n} {\omega_{i} } )^{{r_{2} }}\).
Lemma 4
[38] In an undirected communication topology, if \({\rm M} \in R^{N \times N}\) is the Laplacian matrix, at the same time, if the pinning control matrix \(\ell = diag\{ \ell_{1} ,\ell_{2} ,...,\ell_{n} \}\) satisfies Assumption 3, then \(\lambda_{\min } (\Gamma_{\ell }^{ - 1} (\Gamma_{\ell } {\rm M} + {\rm M}\Gamma_{\ell } )) \le 0\) can be established.
Lemma 5
[38] Suppose that the time sequence \(t_{k}\) satisfies that \(\mathop {\lim }\limits_{k \to + \infty } t_{k} = + \infty\) and \(0 = t_{0} < t_{1} < ... < t_{k} < ...\), then the non-negative function \({\mathbb{V}}(t)\) fulfills.
in which \(0 < p_{1} < 1\), \(p_{2} > 1\), \({\upxi }\), \(\alpha_{1}\), \(\alpha_{2}\) \(\eta > 0\). Afterwards, when there is the condition that \(\frac{{{\upxi }(t_{2k + 1} - t_{2k} )}}{{\eta (t_{2k + 2} - t_{2k + 1} )}} = \lambda_{k} > 1\), \(\forall k \in N_{ + }\) holds, \({\mathbb{V}}(t) \equiv 0\), \(\forall t \ge T_{2}\) can be established, in which T2 denotes the setting time with the expression.
\(T_{2} = t_{{2k^{\prime\prime}}} + \frac{1}{{\upxi }}[\frac{1}{{2 - p_{1} }}\ln (1 + \frac{{\upxi }}{{\alpha_{1} }}) + \frac{1}{{p_{2} - 1}}\ln (1 + \frac{{\upxi }}{{\alpha_{2} }}) - \eta \sum\nolimits_{i = 0}^{{k^{\prime\prime} - 1}} {(\lambda_{i} - 1)(t_{2i + 2} - t_{2i + 1} )} ]\),
\(k^{\prime\prime} = \max \{ k \in N_{ + } :\frac{1}{{1 - p_{1} }}\ln (1 + \frac{{\upxi }}{{\alpha_{1} }}) + \frac{1}{{p_{2} - 1}}\ln (1 + \frac{{\upxi }}{{\alpha_{2} }}) - \eta \sum\nolimits_{i = 0}^{{k^{\prime\prime} - 1}} {(\lambda_{i} - 1)(t_{2i + 2} - t_{2i + 1} )} > 0\}\).
Lemma 6
For the system (1), if \({\mathbb{V}}(t) > 0\) for \(t \ge 0\) and \({\mathbb{V}}(t)\) satisfies.
where \({\upxi }\), \(\alpha\), \(\eta\) are positive constants and \(1 < r < 2\), \(T_{con} (t_{{k_{1} }} ,t_{{k_{2} }} )\) and \(T_{res} (t_{{k_{1} }} ,t_{{k_{2} }} )\) are all the control and rest span length in \([t_{{k_{1} }} ,t_{{k_{2} }} )\), individually, and if \(\frac{{{\upxi }T_{con} (t_{2k} ,t_{2k + 2} )}}{{\eta T_{res} (t_{2k} ,t_{2k + 2} )}} = \lambda_{k} > 1,\forall k \in N_{ + }\) holds, there is \({\mathbb{V}}(t) \equiv 0\), \(\forall t \ge T_{2}\), in which \(T_{2}\) represents the setting time, and for any initial value, \(T_{2}\) is estimated by:
in which \(k^{\prime\prime} = \max \{ k \in N_{ + } :\frac{2}{r(2 - r)}\ln (1 + \frac{{\upxi }}{\alpha }) - \eta T_{res} (t_{0} ,t_{{2k^{\prime\prime}}} )\sum\nolimits_{i = 0}^{{k^{\prime\prime} - 1}} {(\lambda_{i} - 1)} > 0\}\).
Proof
The proof is consisted of two parts:
-
(1)
proving the existence of a settling-time T1, which makes inequality \({\mathbb{V}}(T_{1} ) = 1\) established, in addition, \({\mathbb{V}}(t) \le 1\) for all \(t \ge T_{1}\);
-
(2)
furthermore, proving the existence of a convergence time \(T_{2}\), which makes equality \({\mathbb{V}}(T_{2} ) = 0\) established, in addition, \({\mathbb{V}}(t) \equiv 1\) for all \(t \ge T_{2}\).
When \({\mathbb{V}}(t) \ge 1\) for all \(t > 0\), we rewrite the inequality (11) by
Considering \(\upsilon_{1} (0) = {\mathbb{V}}(0)\), the following function is introduced on the basis of (12)
there is \(0 \le {\mathbb{V}}(t) \le \upsilon_{1} (t)\) when \(t \in [0, + \infty )\). Suppose there is a fixed time T1 that makes \(\upsilon_{1} (T_{1} ) \le 1\) tenable, \({\mathbb{V}}(T_{1} ) \le 1\) can be derived according to squeeze theorem. Simplify the expression of \(\upsilon_{1} (t)\) by introducing a new function \(U_{1} (t)\) to facilitate subsequent analysis and calculation, in which \(U_{1} (t) = \upsilon_{1}^{ - r} (t)\). The substituted inequality is represented as follows:
in which \({\tilde{\xi }} = r{\upxi }\), \(\tilde{\theta } = \frac{{\tilde{\alpha }}}{{{\tilde{\xi }}}}\),\(\tilde{\alpha } = r\alpha\) \(\tilde{\eta } = r\eta\).
Solving the ordinary differential Eq. (14) leads
For all \(t \in [t_{2k} ,t_{2k + 1} )\), by using mathematical induction, one gets
\({\tilde{\xi }}T_{con} (t_{0} ,t_{2k} ) - \tilde{\eta }T_{res} (t_{0} ,t_{2k} ) = \tilde{\eta }T_{res} (t_{0} ,t_{2k} )\sum\limits_{i = 0}^{k - 1} {(\lambda_{i} - 1)}\) can be acquired. Furthermore, let \(\Theta_{1} (t) = \exp \{ \tilde{\eta }T_{res} (t_{0} ,t_{2k} )\sum\limits_{i = 0}^{k - 1} {(\lambda_{i} - 1)} \} \exp \{ - \tilde{\eta }T_{res} (t_{2k} ,t)\}\), it can be concluded \(U_{1} (t) \ge \tilde{\theta }\Theta_{1} (t) - \tilde{\theta }\).
When \(t \in [t_{2k + 1} ,t_{2k + 2} )\), it is evident that
where \(\Pi_{1} (t) = \exp \{ \tilde{\eta }T_{res} (t_{0} ,t_{2k} )\sum\limits_{i = 0}^{k - 1} {(\lambda_{i} - 1)} + {\tilde{\xi }}T_{con} (t_{2k} ,t_{2k + 2} )\}\).
The inequality (18) can be derived from the above analysis:
Denote a new function \(\Lambda_{1} (t)\):
It can be seen that when \(\Lambda_{1} (T_{1} ) = 1\), one can acquire \(U_{1} (t) \ge 1\) based on \(U_{1} (t) = \upsilon^{ - r} (t)\), and \(\upsilon (T_{1} ) \le 1\) for \(U_{1} (t) = \upsilon^{ - r} (t)\), then, \({\mathbb{V}}(T_{1} ) \le 1\) can be acquired. Therefore, \({\mathbb{V}}(t)\) converges from \({\mathbb{V}}(t) > 1\) to \({\mathbb{V}}(t) \le 1\). Moreover, it can be verified that \(\Lambda_{1} (t_{{2k^{\prime}}} ) < 1\), \(\Lambda_{1} (t_{{2(k^{\prime} + 1)}} ) \ge 1\) and \(\mathop {\lim }\limits_{{t \to t_{{2(k^{\prime} + 1)}}^{ - } }} \Lambda_{1} (t) \ge \Lambda_{1} (t_{{2(k^{\prime} + 1)}} ) \ge 1\). when \(t \in [t_{{2k^{\prime} + 1}} ,t_{{2k^{\prime} + 2}} ]\), \(\Lambda_{1} (t)\) is a nonincreasing function, then, \(\Lambda_{1} (t_{{2k^{\prime} + 1}} ) \ge 1\) can be derived. Similarly, \(\mathop {\lim }\limits_{{t \to t_{{2k^{\prime} + 1}}^{ - } }} \Lambda_{1} (t) = \Lambda_{1} (t_{{2k^{\prime} + 1}} ) \ge 1\). Since \(\Lambda_{1} (t)\) is an increasing function within the interval \([t_{{2k^{\prime}}} ,t_{{2k^{\prime} + 1}} ]\), combined with the zero point theorem, we have \(T_{1} \in [t_{{2k^{\prime}}} ,t_{{2k^{\prime} + 1}} )\) such that \(\Lambda_{1} (T_{1} ) = 1\).
From the above analysis, the setting-time T1 can be estimated by
in which \(k^{\prime} = \max \{ k \in N_{ + } :\frac{1}{r}\ln (1 + \frac{{{\tilde{\xi }}}}{{\tilde{\alpha }}}) - \eta T_{res} (t_{0} ,t_{{2k^{\prime}}} )\sum\nolimits_{i = 0}^{{k^{\prime} - 1}} {(\lambda_{i} - 1)} > 0\}\).
For all \(t > T_{1}\), when \(0 \le {\mathbb{V}}(t) \le 1\), (11) can be rewritten in the below way:
Based on (20), the following system is introduced
It is easy to see that \(0 \le {\mathbb{V}}(t) \le \upsilon_{2} (t)\) when \(t \ge T_{1}\). Assume that there is a time T2 that makes \(\upsilon_{2} (T_{2} ) = 0\) tenable, \({\mathbb{V}}(T_{2} ) = 0\) can be derived according to squeeze rule. When \(t \ge T_{2}\), \({\mathbb{V}}(T_{1} ) \equiv 0\). Simplify the expression of \(\upsilon_{2} (t)\) by introducing a new function \(U_{2} (t)\) to facilitate subsequent analysis and calculation, in which \(U_{2} (t) = \upsilon_{2}^{2 - r} (t)\). The substituted inequality is represented by:
in which \({\hat{\xi }} = (2 - r){\upxi }\), \(\hat{\alpha } = (2 - r)\alpha\), \(\hat{\theta }{ = }\frac{{\hat{\alpha }}}{{{\hat{\xi }}}}\) \(\hat{\eta } = (2 - r)\eta\).
Solving the ordinary differential Eq. (22) yields:
For \(t \in [t_{2k} ,t_{2k + 1} )\), perform the following recursive processing on Eq. (24):
According to the derivation of (16), it has
Combining with the constant variation formula and the first equation of (23), one has
Substituting (26) into (25) yields
From the above analysis of T1, the following equality can be derived:
Let \(\Theta_{2} (t) = \exp \{ \frac{2 - r}{r}\ln (1 - \hat{\theta }) - \eta (2 - r)T_{res} (t_{0} ,t_{2k} )\sum\limits_{i = 0}^{k - 1} {(\lambda_{i} - 1)} - {\hat{\xi }}T_{con} (t_{2k} ,t)\}\), and \(\Psi = 1 + \hat{\theta }\). To sum up, one has \(\dot{U}_{2} (t) = \Psi \Theta_{2} (t) - \hat{\theta }\), \(t \in \left[ {t_{2k} ,t_{2k + 1} } \right)\).
When \(t \in [t_{2k + 1} ,t_{2k + 2} )\), it is evident that
Where \( \Pi _{2} (t) = \exp \{ \frac{{2 - r}}{r}\ln (1 - {\theta }) - (2 - r)\eta T_{{res}} (t_{0} ,t_{{2k}} )\sum\limits_{{i = 0}}^{{k - 1}} {(\lambda _{i} - 1)} - {\text{{xi }T}}_{{con}} (t_{{2k}} ,t_{{2k + 2}} )\} \).
On account of the aforementioned analyses, the below inequality is obtained:
Denote a new function
Apparently, \(\mathop {\lim }\limits_{{t \to t_{{2(k^{\prime\prime} + 1)}}^{ - } }} \Lambda_{2} (t) \le \Lambda_{2} (t_{{2(k^{\prime} + 1)}} )\), and \(\Lambda_{2} (t)\) is not decreasing within interval \([t_{2k + 1} ,t_{2k + 2} )\). It can be derived \(\mathop {\lim }\limits_{{t \to t_{{2(k^{\prime\prime} + 1)}}^{ - } }} \Lambda_{2} (t) = 0\) and \(\Lambda_{2} (t_{{2k^{\prime\prime}}} ) = 0\). Furthermore, when \(t \in [t_{{2k^{\prime\prime}}} ,t_{{2k^{\prime\prime} + 1}} )\), \(\Lambda_{2} (t)\) is a decreasing function, together with the fact \(\Lambda_{2} (t_{{2k^{\prime\prime}}} ) > 0\), there exists \(T_{2} \in [t_{{2k^{\prime\prime}}} ,t_{{2k^{\prime\prime} + 1}} )\) satisfying \(\Lambda_{2} (t) > 0\) for \(t \in [t_{{2k^{\prime\prime}}} ,T_{2} )\) and \(\Lambda_{2} (t) = 0\) for \(t \in [T_{2} ,t_{{2k^{\prime\prime} + 1}} )\). Then, we have \(\Lambda_{2} (T_{2} ) = 0\) when \(U_{2} (T_{2} ) = 0\), and \(\upsilon (T_{2} ) = U_{2}^{{\frac{1}{1 - \mu }}} (T_{2} ) = 0\). According to \(0 \le {\mathbb{V}}(t) \le \upsilon (t)\), \({\mathbb{V}}(T_{2} ) = 0\) is therefore obtained.
From the above analysis, the setting time T2 can be described by \(\Lambda_{2} (T_{2} ) = 0\) as follows.
\(T_{2} = t_{{2k^{\prime\prime}}} + \frac{1}{{\upxi }}[\frac{2}{r(2 - r)}\ln (1 + \frac{{\upxi }}{\alpha }) - \eta T_{res} (t_{0} ,t_{{2k^{\prime\prime}}} )\sum\nolimits_{i = 0}^{{k^{\prime\prime} - 1}} {(\lambda_{i} - 1)} ]\).
The proof is completed.
Remark 4
The emphasis of the present work is achieving fixed-time synchronization by using aperiodic complete intermittent controller (7). Therefore, in rest interval \(t \in [t_{2k + 1} ,t_{2k + 2} )\), a relaxation condition \( {\dot{\mathbb{V}}}(t) \le \rho {\mathbb{V}}(t) \) is considered here. Lemma 6 provides a new fixed-time stability result to avoid the inconvenience by imposing controller (7).
Remark 5
According to the above meaning of \(\mu\) and \({\mathbb{V}}(t)\), \(\mu = r + sig({\mathbb{V}}(t) - 1)\) can be obtained. It is seen that \(\mu\) is related to \({\mathbb{V}}(t)\). Therefore, the part of μ that works can be selected by the value of \({\mathbb{V}}(t)\). If there is \({\mathbb{V}}(t) \ge 1\), \(r + sig({\mathbb{V}}(t) + 1) \ge 1\) is obtained. When \({\mathbb{V}}(t) < 1\), \(0 < r + sig({\mathbb{V}}(t) + 1) < 1\) can be obtained. Obviously, the value of μ varies within different ranges of \({\mathbb{V}}(t)\). In order to distinguish it from other cases, μ is represented by r.
Remark 6
In the Lemma 5 of [38], it was done by artificially ignoring the smaller term. For example, when \({\mathbb{V}}(t) > 1\), and \(0 < p_{1} < 1\), \(- \alpha {\mathbb{V}}^{{p_{1} }} (t)\) plays a smaller role than \(- \alpha_{2} {\mathbb{V}}^{{p_{2} }} (t)\), so it is obviously reasonable to ignore \(- \alpha_{1} {\mathbb{V}}^{{p_{1} }} (t)\). Fortunately, this method will shrink the differential inequality again. We introduce a sign function \(\mu = r + sig({\mathbb{V}}(t) - 1)\), where the value of \(\mu\) is determined by the relationship between \({\mathbb{V}}(t)\) and 1. That is to say, there is no effect of neglecting certain term, so a more accurate setting-time can be obtained. The setting-time in [38] is given by.
In comparison with [38], Lemma 6 can pursue a smaller setting-time, which is consistent with previous speculations.
3 Main Results
In this section, we shall explore fixed-time synchronization issue in the intermittently coupled network (1) under controller (7). The following content expounds the main results.
Theorem 1.
Based on the premise that the Assumption 1–3 hold, if there exists constant \(\zeta \ge 2\gamma > 0\) such that.
in which \({\upxi } = - 2\chi + 2c\lambda_{\min } (\Gamma_{\ell } ) - \frac{\zeta }{{1 - \tilde{d}}} > 0\), \(\eta = 2\chi + \frac{\zeta }{{1 - \tilde{d}}}\), then the fixed-time synchronization of network (1) could be obtained under controller (7). Additionally, the setting-time T2 can be estimated as
where \(k^{\prime\prime} = \max \{ k \in N_{ + } :\frac{2}{r(2 - r)}\ln (1 + \frac{{\upxi }}{\alpha }) - \eta T_{res} (t_{0} ,t_{{2k^{\prime\prime}}} )\sum\nolimits_{i = 0}^{{k^{\prime\prime} - 1}} {(\lambda_{i} - 1)} > 0\}\), \(\alpha = 2\alpha \lambda_{{_{\min } }}^{{\frac{1}{2}(1 + r + sig({\mathbb{V}}(t) - 1))}} (\Gamma_{\partial } ) > 0\).
Proof
In order to make the proof process brief, let \(\rho = r + sig({\mathbb{V}}(t) - 1)\). The below Lyapunov functional is considered.
where \( {\mathbb{V}}_{1} (t) = e^{T} (t)(\Gamma _{\ell } \otimes I_{n} )e(t) \), \( {\mathbb{V}}_{2} (t) = \frac{\zeta }{{1 - \tilde{d}}}\int_{{t - d(t)}}^{t} {e^{T} (s)(\Gamma _{\ell } \otimes I_{n} )e(s)ds} \).
Denote the derivative of \( {\mathbb{V}}(t) \) by \( {\dot{\mathbb{V}}}(t) \), and calculate it as below
When \(t \in [t_{2k} ,t_{2k + 1} )\), \(k = 1,2,3,...\), according to the expression of \( \dot{e}(t) \), it can be obtained
Combining with Lemma 1 and Assumption 1, we have
By virtue of Lemma 2, it can be obtain:
Additionally,
The above derivation results are combined as follows:
When \({\mathbb{V}}(t) > 1\), relying on Lemma 3, we have
and
The above derivation results are combined by the following:
According to (36-39), we have
in which \( {{\xi }} = - 2\chi + 2c\lambda _{{\min }} (\Gamma _{\ell } ) - \frac{\zeta }{{1 - \tilde{d}}} > 0,\;\;\alpha = 2\alpha (nN)^{{\frac{{1 - \rho }}{2}}} \lambda _{{\min }} ^{{\frac{{1 + \rho }}{2}}} (\Gamma _{\ell } ) > 0 \).
When \({\mathbb{V}}(t) < 1\), the following derivation is made according to Lemma 3:
and
The above derivation results are combined in following way:
According to (46-48), we have
in which \( \xi = - 2\chi + 2c\lambda _{{\min }} (\Gamma _{\ell } ) - \frac{\zeta }{{1 - \tilde{d}}} > 0,\;\alpha = 2\alpha \lambda _{{\min }} ^{{\frac{{1 + \rho }}{2}}} (\Gamma _{\ell } ) > 0 \).
From the expression of \(\dot{e}(t)\), when \(t \in [t_{2k + 1} ,t_{2k + 2} )\), we obtain
where \( \zeta > 2\gamma \) and \(\eta = 2\chi + \frac{\zeta }{{1 - \tilde{d}}}\).
Finally, combining Lemma 6 with (32), (33), (45), (50) and (49), there are \({\mathbb{V}}(t) \equiv 1\) for all \(t \ge T_{2}\). From \(\left\| {e(t)} \right\| \le \sqrt {\frac{{{\mathbb{V}}(t)}}{{\lambda_{\min } (\Gamma_{\ell } )}}}\), for all \(t \ge T_{2}\), it can be concluded that \(\left\| {e_{i} (t)} \right\| \equiv 0\). From Definition 1, the fixed-time synchronization of intermittently coupled network (1) can be achieved under aperiodic intermittent pinning controller (7). Furthermore, the settling-time is apparently small and more accurate than the estimated value T2 defined in (35). The proof is completed.
Remark 7
During the partial analytical process of above certification, we discuss \( - 2\alpha e^{T} (t)(\Gamma _{\ell } \otimes I_{n} )sig^{{r + sig(V(t) + 1)}} (w(t)) - 2\alpha e^{T} (t)(\Gamma _{\ell } \otimes I_{n} ){\mho } \) in two cases: \({\mathbb{V}}(t) \ge 1\) and \({\mathbb{V}}(t) < 1\). On the basis of the definition \(\rho = r + sig({\mathbb{V}}(t) - 1)\), when \({\mathbb{V}}(t) \ge 1\), \(\rho \ge 1\); when \({\mathbb{V}}(t) < 1\), \(0 < \rho < 1\). Furthermore, for the two different cases of \(p_{1} > 1\), \(0 < p_{2} < 1\), the scaling of \(\sum\nolimits_{i = 1}^{n} {\omega_{i}^{p} }\) in Lemma 3 is not entirely the same. Therefore, it is necessary to discuss the \({\mathbb{V}}(t)\) partition case.
Remark 8
For controller (7), the pinned nodes are selected as follows: firstly, through Tarjan’s algorithm, decide components which are composed of all connecting nodes; then, choose one node from each component, randomly. The chosen nodes are pinned nodes, Specially, if a node is isolated, it should be pinned. The pinned nodes satisfy Assumption 3. Under the condition of ensuring that the network can achieve synchronization, there are minimal number of pinned nodes.
Consider the periodic intermittent coupling case, the index function defined by
in which, \(T > 0\) and \({\mathfrak{m}} > 0\) represent control period and represents control rate, respectively. Then, a periodic intermittent controller is devised as
The meanings of the other parameters are the same as in controller (7).
Corollary 1
If there exist constants \(\zeta \ge 2\gamma > 0\) such that \(c > \frac{{2\chi + \frac{\zeta }{{1 - \tilde{d}}}}}{{2\lambda_{\min } (\Gamma_{\ell } )}}\) and \(\frac{\eta }{\xi + \eta } < {\mathfrak{m}}\), where \(\xi = - 2\chi + 2c\lambda_{\min } (\Gamma_{\ell } ) - \frac{\zeta }{{1 - \tilde{d}}} > 0\), \(\eta = 2\chi + \frac{\zeta }{{1 - \tilde{d}}}\), then the fixed-time synchronization is achieved in network (1) under the periodic intermittent pinning controller (52). Additionally, the settling-time is estimated as.
where \(k^{\prime\prime} = \max \{ k \in N_{ + } \frac{2}{r(2 - r)}\ln (1 + \frac{\xi }{\alpha }) - k^{\prime\prime}((\xi + \eta ){\mathfrak{m}} - \eta )T > 0\}\), \(\alpha = 2\alpha \lambda_{\min }^{{\frac{1}{2}(1 + r + sig(V(t) - 1))}} (\Gamma_{A} ) > 0\).
4 Simulation Results
In this section, three numerical simulation examples are used to visually demonstrate the correctness and availability of the theoretical results.
4.1 Demonstrations of the Proposed Method
Example1. The delayed Lorenz system is taken as network node:
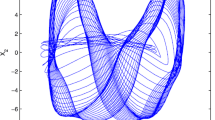
where \(\Upsilon = \left[ {\begin{array}{*{20}c} { - 10} & {10} & 0 \\ {28} & { - 1} & 0 \\ 0 & 0 & { - 8/3} \\ \end{array} } \right]\), \(s(t) = \left( {\begin{array}{*{20}c} {s_{1} (t)} \\ {s_{2} (t)} \\ {s_{3} (t)} \\ \end{array} } \right)\), \(f_{1} (s(t)) = \left( {\begin{array}{*{20}c} 0 \\ { - s_{1} (t)s_{3} (t)} \\ {s_{1} (t)s_{2} (t)} \\ \end{array} } \right)\), \(f_{2} (s(t - d(t))) = \left( {\begin{array}{*{20}c} 0 \\ {6s_{2} (t - d(t))} \\ 0 \\ \end{array} } \right)\) and \(d(t) = 1\). The chaotic behavior of the system (53) is depicted by Fig. 2. Furthermore, the delayed Lorenz system (53) satisfies Assumption 1 when \(\chi = 3.5064\) and \(\gamma = 0.1\). The time-delay function satisfies \(\dot{d}(t) \le \tilde{d} < 1\) which is consistent with Assumption 2.

The chaotic attractor of system (53)
Consider network (1) with five nodes, in which the coupling strength is \(\nabla = 50\), and \(B = \left[ {\begin{array}{*{20}c} 0 & 1 & 0 & 0 & 0 \\ 1 & 0 & 1 & 0 & 0 \\ 0 & 1 & 0 & 0 & 0 \\ 0 & 0 & 0 & 0 & 1 \\ 0 & 0 & 0 & 1 & 0 \\ \end{array} } \right]\).
The initial conditions are \(x_{1} (\upsilon ) = (\begin{array}{*{20}c} {1.1} & {0.5} & { - 0.1} \\ \end{array} )^{T}\), \(x_{2} (\upsilon ) = ( - \begin{array}{*{20}c} {0.7} & {0.5} & {0.2} \\ \end{array} )^{T}\), \(x_{3} (\upsilon ) = (\begin{array}{*{20}c} 2 & { - 0.4} & { - 3} \\ \end{array} )^{T}\), \(x_{4} (\upsilon ) = (\begin{array}{*{20}c} {0.4} & { - 0.3} & { - 1} \\ \end{array} )^{T}\), \(x_{5} (\upsilon ) = (\begin{array}{*{20}c} {0.5} & {0.6} & { - 0.8} \\ \end{array} )^{T}\), \(\upsilon \in [ - 1,0]\). And the time sequences \(\{ t_{2k} \}\) and \(\{ t_{2k + 1} \}\) are defined as:
\(\{ t_{2k + 1} \} = \{ 0.07,0.14,0.26,0.35,0.49,0.66,0.87,1.24,1.39,1.54,1.63,1.76,2,..,\}\).
To measure the extent of synchronization is achieved, we introduce synchronization square error \(E(t) = \sum\nolimits_{i = 1}^{5} {\left\| {e_{i} (t)} \right\|^{2} }\) as a quantity index. When the control actions are removed, the trajectory of E(t) is drawn by Fig. 3, which shows that synchronization cannot be reached.

Trajectory of E(t) without controller
Next, the complete intermittent controller (7) is added to network (54) with the parameters \(\alpha = 1\), \(\zeta = 0.2\), \(r = 1.5\), \(\tilde{d} = 0\), \(c{ = 50}\) and \(\ell = {\text{diag}}\{ 1,0,0,0,1\}\) which is pinning control matrix. By some simple calculation, if \(\lambda_{\min } (\Gamma_{\ell } ) = 0.1981\) and \(\gamma = - 0.2971\), Assumption 3 will hold. And the estimated setting-time is \(T_{f} = 6.7558\). The trajectory of synchronization square error (denoted by E0(t)) with controller (7) is depicted in Fig. 4. It is obviously to see that the synchronization of intermittently coupled complex network can be realized via our proposed aperiodically intermittent pinning controller. Furthermore, according to Fig. 4, it is apparent that the synchronization can be achieved when \(t = 2.3{\text{s}}\). This is considerably smaller than \(T_{f} = 6.7558{\text{s}}\).

Trajectory of E0(t) with controller (7)
In the following, it will be verified the estimated setting-time of fixed-time synchronization is not dependent of the incipient conditions. Therefore, we magnify the initial values by a factor of ten to observe the setting-time. The synchronization square error (denoted by E1(t)) is portrayed in Fig. 5. Moreover, based on comparing the synchronization time shown in Figs. 4 and 5, it can be concluded that the setting-time is similar for different initial conditions. Thus, it can be quite evident that the characteristics of fixed-time synchronization are verified.

Trajectory of E1(t) with controller (7)
4.2 Comparisons of the Other Results
Example 2
In [38], the authors investigated fixed-time synchronization in complex networks with continuous coupling via controller (8).
We describe the network [38] with 5 nodes in the following way:
The same parameters and initial values as in SubSect. 4.1 and [38] are used in this example. For the purpose of comparison, the designed controller (7) and controller (8) proposed in [38] are used to complex network (54), respectively. According to [38], the parameter of controller (8) are given as: \(c = 50\), \(\alpha_{1} = 1\), \(\alpha_{2} = 1\), \(p_{1} = 0.5\), \(p_{2} = 1.5\), and \(\zeta = 0.2\).
Figure 6 plots the synchronization square error (expressed by E01(t)) with controller (7) and the synchronization square error (expressed by E2(t)) with controller (8). According to Fig. 6, It is not difficult to conclude that the synchronization square error E2(t) converges faster and has small error, which shows the effectiveness of our controller (7).

Trajectories of E01(t) and E2(t) under controller (7) and controller in [38]
Example 3
In this example, the controller (8) proposed in [38] is applied to the intermittently coupled network (1) with \(c = 50\), \(\alpha_{1} = 1\), \(\alpha_{2} = 1\), \(p_{1} = 0.5\), \(p_{2} = 1.5\) and \(\zeta = 0.2\). The trajectories of synchronization square error under controller (7) (denoted by E0(t)) and controller (8) in [38] (denoted by E3(t)) are shown by Fig. 7. It could be found that the synchronization under controller in [38] is realized at about \(t = 5{\text{s}}\), while the synchronization time is \(t = 2.3{\text{s}}\) by using controller (7). Obviously, our proposed method can possess smaller convergence time. Moreover, it is noted that the synchronization square error E0(t) can be smaller than E3(t).

Trajectories of E0 (t) and E3(t) under controller (7) and controller in [38]
5 Conclusion
This paper investigates the fixed-time synchronization of intermittently coupled network with time-varying delay under complete intermittent controller. A novel fixed-time stability lemma is proven. An aperiodically intermittent economical controller is designed. Several fixed-time synchronization conditions have been exported and the settling-time is independent from any initial values. The obtained results have been demonstrated by numerical simulations. It is noted that the index function is defined to be identical to all nodes in this work, the case of non-uniformity for the index function can be further considered. Moreover, the estimation of setting-time is related to controller parameters and model parameters, the preassigned-time synchronization problem can be further considered to address it. These challenging problems bring the future research direction.
References
Strogatz SH, Stewart I (1993) Coupled oscillators and biological synchronization. Sci Am 269(6):102–109
Yao W et al (2023) Event-triggered control for robust exponential synchronization of inertial memristive neural networks under parameter disturbance. Neural Netw 164:67–80
Barabási, A. L. (2003). Linked: The new science of networks: 409–410.
Shoreh AH, Kuznetsov NV, Mokaev TN (2022) New adaptive synchronization algorithm for a general class of complex hyperchaotic systems with unknown parameters and its application to secure communication. Physica A 586:126466
Liu J, Mei G, Wu X, Lü J (2018) Robust reconstruction of continuously time-varying topologies of weighted networks. IEEE Trans Circuits Syst I Regul Pap 65(9):2970–2982
Niu R, Wu X, Lu JA, Lü J (2019) Adaptive diffusion processes of time-varying local information on networks. IEEE Trans Circuits Syst II Exp Briefs 66(9):1592–1596
Singh VK, Natarajan V (2021) Finite-dimensional controllers for consensus in a leader-follower network of marginally unstable infinite-dimensional agents. IEEE Control Syst Lett 6:590–595
Xu D, Liu Y, Liu M (2021) Finite-time synchronization of multi-coupling stochastic fuzzy neural networks with mixed delays via feedback control. Fuzzy Sets Syst 411:85–104
Ali MS, Yogambigai J (2017) Exponential stability of semi-Markovian switching complex dynamical networks with mixed time varying delays and impulse control. Neural Process Lett 46:113–133
Wu S, Li X, Ding Y (2021) Saturated impulsive control for synchronization of coupled delayed neural networks. Neural Netw 141:261–269
Shanmugam L, Mani P, Rajan R, Joo YH (2018) Adaptive synchronization of reaction–diffusion neural networks and its application to secure communication. IEEE Transactions on Cybernetics 50(3):911–922
Ren H, Peng Z, Gu Y (2020) Fixed-time synchronization of stochastic memristor-based neural networks with adaptive control. Neural Netw 130:165–175
Li HL, Hu C, Zhang L, Jiang H, Cao J (2022) Complete and finite-time synchronization of fractional-order fuzzy neural networks via nonlinear feedback control. Fuzzy Sets Syst 443:50–69
Wang J, Feng J, Lou Y, Chen G (2020) Synchronization of networked harmonic oscillators via quantized sampled velocity feedback. IEEE Trans Autom Control 66(7):3267–3273
Li, N., & Wang, P. (2021, July). Synchronization of complex networks with simple fixed-time semi-intermittent control. In: 2021 40th Chinese Control Conference (CCC) (pp. 546–551). IEEE.
Zhou W, Hu Y, Liu X, Cao J (2022) Finite-time adaptive synchronization of coupled uncertain neural networks via intermittent control. Phys A 596:127107
Wang JA (2017) Synchronization of delayed complex dynamical network with hybrid-coupling via aperiodically intermittent pinning control. J Franklin Inst 354(4):1833–1855
Zhou P, Shi J, Cai S (2020) Pinning synchronization of directed networks with delayed complex-valued dynamical nodes and mixed coupling via intermittent control. J Franklin Inst 357(17):12840–12869
Ding S, Wang Z (2020) Event-triggered synchronization of discrete-time neural networks: a switching approach. Neural Netw 125:31–40
Hu C, Jiang H (2015) Pinning synchronization for directed networks with node balance via adaptive intermittent control. Nonlinear Dyn 80:295–307
Ling G, Liu X, Ge MF, Wu Y (2021) Delay-dependent cluster synchronization of time-varying complex dynamical networks with noise via delayed pinning impulsive control. J Franklin Inst 358(6):3193–3214
Shen Y, Shi J, Cai S (2021) Exponential synchronization of directed bipartite networks with node delays and hybrid coupling via impulsive pinning control. Neurocomputing 453:209–222
Polyakov A (2011) Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans Autom Control 57(8):2106–2110
Liu X, Chen T (2014) Synchronization of nonlinear coupled networks via aperiodically intermittent pinning control. IEEE Transact Neural Netw Learn Syst 26(1):113–126
Yu J, Hu C, Jiang H, Teng Z (2011) Exponential synchronization of Cohen-Grossberg neural networks via periodically intermittent control. Neurocomputing 74(10):1776–1782
Mei J, Jiang M, Wang B, Liu Q, Xu W, Liao T (2014) Exponential p-synchronization of non-autonomous Cohen-Grossberg neural networks with reaction-diffusion terms via periodically intermittent control. Neural Process Lett 40(2):103–126
Zhou P, Shen Y, Cai S (2019) Nonperiodic intermittent control for pinning synchronization of directed dynamical networks with internal delay and hybrid coupling. Physica A 531:121737
Wang P, Feng J, Su H (2019) Stabilization of stochastic delayed networks with Markovian switching and hybrid nonlinear coupling via aperiodically intermittent control. Nonlinear Anal Hybrid Syst 32:115–130
Fang, J., Yin, N., Wei, D., Liu, H., & Deng, W. (2023). Improved finite-time synchronization of coupled discontinuous neural networks under adaptive sliding mode control. International Journal of Dynamics and Control, 1–13.
Li N, Wu X, Feng J, Lü J (2020) Fixed-time synchronization of complex dynamical networks: a novel and economical mechanism. IEEE Transact Cybernetics 52(6):4430–4440
Liu X, Shao S, Hu Y, Cao J (2022) Fixed-time synchronization of multi-weighted complex networks via economical controllers. Neural Process Lett 54(6):5023–5041
Xu Y, Wu X, Li N, Lu JA, Li C (2022) Synchronization of complex networks with continuous or discontinuous controllers based on new fixed-time stability theorem. IEEE Transact Syst, Man, Cybernetics: Syst 53(4):2271–2280
Wang M, Qiu J, Yan Y, Zhao F, Chen X (2022) Fixed-time synchronization of stochastic complex networks with mixed delays via intermittent control. IFAC-PapersOnLine 55(3):96–101
Fan Y, Liu H, Zhu Y, Mei J (2016) Fast synchronization of complex dynamical networks with time-varying delay via periodically intermittent control. Neurocomputing 205:182–194
Liu M, Jiang H, Hu C (2017) Finite-time synchronization of delayed dynamical networks via aperiodically intermittent control. J Franklin Inst 354(13):5374–5397
Zhou Y, Wan X, Huang C, Yang X (2020) Finite-time stochastic synchronization of dynamic networks with nonlinear coupling strength via quantized intermittent control. Appl Math Comput 376:125157
Jing T, Zhang D, Mei J, Fan Y (2019) Finite-time synchronization of delayed complex dynamic networks via aperiodically intermittent control. J Franklin Inst 356(10):5464–5484
Dong Y, Chen J, Cao J (2022) Fixed-time pinning synchronization for delayed complex networks under completely intermittent control. J Franklin Inst 359(14):7708–7732
Han X, Lu JA, Wu X (2008) Synchronization of impulsively coupled systems. Int J Bifurcation Chaos 18(05):1539–1549
Hu C, He H, Jiang H (2021) Edge-based adaptive distributed method for synchronization of intermittently coupled spatiotemporal networks. IEEE Trans Autom Control 67(5):2597–2604
Hu C, He H, Jiang H (2020) Synchronization of complex-valued dynamic networks with intermittently adaptive coupling: A direct error method. Automatica 112:108675
Bernstein DS (2009) Matrix mathematics: theory, facts, and formulas. Princeton University Press
Acknowledgements
This work is supported by the National Natural Science Foundation of China (62003077), Major Science and Technology Project of Shanxi Province (202201090301013), the Key Research and Development Program of Shanxi Province (202202150401005, 202202100401002), Shanxi Provincial Technology Innovation Center (202104010911033) and the Fundamental Research Program of Shanxi Province (20210302123210, 202203021222186).
Author information
Authors and Affiliations
Contributions
Conceptualization: Jian-An Wang, Mingjie Li, Zhicheng Zhao Investigation: Jian-An Wang, Cai Ruirui Methodology: Jian-An Wang, Cai Ruirui, Zhang Junru, Jie Zhang Simulation: Ruirui Cai, Zhang Junru Writing—original draft preparation: Jian-An Wang, Ruirui Cai, Zhang Junru Writing—review and editing: Jian-An Wang, Jie Zhang, Mingjie Li All authors have read and agreed to the published version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Wang, JA., Cai, R., Zhang, J. et al. Fixed-Time Pinning Synchronization of Intermittently Coupled Complex Network via Economical Controller. Neural Process Lett 56, 51 (2024). https://doi.org/10.1007/s11063-024-11441-2
Accepted:
Published:
DOI: https://doi.org/10.1007/s11063-024-11441-2