
Abstract
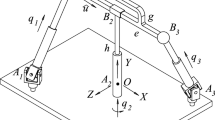
This paper deals with a new, six degrees-of-freedom parallel manipulator comprising a platform, three links and three two-wheel carts supporting the links. The wheels are independently driven, allowing the manipulator a workspace which is limited only by the lengths of the links and the size of the plane on which the carts move. The direct and inverse dynamic problems of the manipulator are solved. It is shown that the Jacobian associated with the direct problem becomes identically singular when used to solve the inverse problem, and hence must be redefined; and that once redefined, it losses its standard structure and cannot be used to solve the direct problem. Three solution methods to the inverse problem are presented and are shown to lead to indistinguishable results.
Similar content being viewed by others


References
Internet cite: http://www-sop.inria.fr/coprin/equipe/merlet/merlet_eng.html
Merlet, J.P.: Parallel Robots. Kluwer Academic Publishers (2000)
Tahmasebi, F., Tasi, W.L.: On the stiffness of a novel six degrees-of-freedom parallel manipulator. J. Robot. Syst. 12(12), 845–856 (1995)
Ben-Horin, R., Shoham, M.: Construction of a six degrees of freedom parallel manipulator with three planarly actuated links. Proceedings of The ASME Design Engineering Technical Conferences and Computers in Engineering Conference, (August 18–22, 1996)
Ben-Horin, R., Shoham, M., Djerassi, S.: Kinematics, dynamics and construction of a planarly actuated robot. Robot. Comput. Integr. Manuf. 14(2), 163–172 (1998)
Ostrovskaya, S., Angeles, J., Spiteri, R.: Dynamics of a mobile robot with three ball-wheels. Int. J. Robot. Res. 19(4) 383–393 (2000)
Shoval, S., Shoham, M.: Sensory redundant parallel mobile mechanism. IEEE International Conference on Robotics and Automation. Seoul, Korea (2001)
Shoval, S.: Stability of multi tracked robot traveling over steep slopes. IEEE International Conference on Robotics and Automation. New Orleans (2004)
Muller. A., Maisser, P.: Kinematic and dynamics properties of parallel manipulators. J. Multibody Syst. Dyn. 5(3), 223–249 (2001)
Dombiak, P., Shoham, M., Grossman, G.: A parallel six degrees-of-freedom inflatable robot. ASME Mechanism and Robotics Conference Baltimore (2000)
Kane T.R., Likins P.W., Levinson D.A.: Spacecraft dynamics. McGraw-Hill, New-York (1983)
Djerassi, S.: Determination of noncontributing forces and noncontributing impulses in three-phase motions. J. Appl. Mech. 64, 582–589 (1997)
Faux I.D., Pratt, M.J.: Computational geometry for design and manufacture. Ellis Horwood Ltd. (1979)
Djerassi, S., Bambeger, H.: Constrained forces and the method of auxiliary generalized speeds. ASME J. Appl. Mech. (2002)
Ben-Horin, R.: Criteria for analysis of parallel robots. Ph.D. Thesis, Technion, Haifa (1998)
Internet cite: Commercial software tools for multibody dynamic analysis. http://www.ae.gatech.edu/∼obauchau/dymore/SoftwareTools.html, Bauchau, O. A.
Kane, T.R., Levinson, D.A.: Dynamics: Theory and application. McGraw-Hill, New-York (1985)
Wehage, R.A., Haug, E.J.: Generalized coordinates partitioning for dimension reduction analysis of constrained dynamical systems. J. Mech. Des. 104, 247–255 (1982)
Kim, S.S., Vanderploeg, M.J.: QR decomposition for state space representation of constrained mechanical systems. J. Mech. Transm. Autom. Des.108, 183–188 (1986)
Kamman, J.W., Huston, R.L.: Dynamics of constrained multibody dynamics. J. Appl. Mech. 51, 899–903 (1984)
Singh, R.P., Likins, P.W.: Singular value decomposition for constrained dynamical systems. J. Appl. Mech. 52, 943–948 (1985)
Amirouche, F.M.L., Jia T., Ider, S.K.: A recursive householder transformation for complex dynamical systems with constraints. J. Appl. Mech. 55, 729–734 (1988)
Liang, C.D., Lance, G.M.: A differentiable null-space method for constrained dynamic analysis. J. Mech. Transm. Autom. Des. 109, 405–411 (1987)
Fliess, M., Levine, J., Martin, P., Rouchon, P.: Flatness and defect of non-linear systems. Int. J. Control 61(6), 1327–1361 (1995)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Horin, P.B., Djerassi, S., Shoham, M. et al. Dynamics of a six degrees-of-freedom parallel robot actuated by three two-wheel carts. Multibody Syst Dyn 16, 105–121 (2006). https://doi.org/10.1007/s11044-006-9016-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11044-006-9016-4