
Abstract
Environmental pollution and air quality are increasingly important topics within the areas of Smart City and state regulations. The aim of the article is to present the progress in the design of the emission monitoring system intended for use in non-industry heating appliances in households. The article analyses potential opportunities in aims of improving the design of a monitoring system that was experimentally tested on small heat source. Geometry modifications, sensor placements and orientation were evaluated using Computational Fluid Dynamics in Ansys Fluent software 2022 R2 including both air and CO/CO2 dispersion models. The final geometry introduced a streamlined funnel along with a separation element, which distributed the air flow evenly between the sensors. The results showed more uniform air flow as the standard deviation of downstream velocity improved from ± 0,693 m/s to ± 0,297 m/s. In conclusion, these outcomes assist in the reduction of air pollution.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In order to achieve the European Union’s objective of reducing emissions by 55% compared to 1990 levels, it is crucial to establish a cost-effective and easily deployable system for real-time monitoring of emission production. Additionally, the goal of achieving carbon neutrality by the year of 2050 is also a strong motivator for developing new and innovative solutions in the market. Emissive substances such as PM10, originating from sources such as roads, industries, and fuel burning, are able to penetrate lung tissues, leading to breathing difficulties. Volatile organic compounds (VOC) and PM2.5, produced by various combustion processes, also causes respiratory issues. CO2, a greenhouse gas, obstructs the oxygen supply to tissues. CH4 and N2O can result in inflammation of the bronchi and lungs. Ambient exposure to higher PM2.5 concentrations decreases average life expectancy at birth by approximately one year, while in more polluted countries shows 1.2–1.9 years [1].
The manner in which air quality data is displayed and gathered is an important factor for applying Smart City concepts. Internet of Things (IoT) platforms exist that graphically represent data acquired from various smart devices. Such existing platforms are for instance “PurpleAir” (2019), “AirBox” (2017) and “ChairSense” (2016) [2]. Sensors are designed such that the change of electrical voltage is proportional (with a known relationship) to the concentration of the desired substance. To inspect the emission production within the city in real time, a large number of nodes are required, which brings up the challenge of financial feasibility.
Based on the 2011 UN urbanization report, urban cities account for 70% of global energy consumption and greenhouse gas emissions although they cover only 2% of the Earth’s surface [3]. Modern monitoring systems applied in Smart Cities are commonly applied in aims of gathering and providing relevant real-time data [4]. Smart sensors that are fully mobile and wireless are deployed into a wireless sensor network (WSN). Lack of thermal insulation and old building lead to very large heat losses, which are compensated with excessive emission production and pollution [5].
Computational Fluid Dynamics (CFD) is often used in order to numerically determine the air flow characteristics in both indoor and outdoor applications, thus computer simulation emerges as the optimal choice for fulfilling these requirements [6]. The master thesis [7] implemented CFD to simulate airflow pattern and gaseous pollutants dispersion of CO2 concentration. This was then used to actively control a demand-controlled ventilation (DCV) which led to energy savings from 33% up to 50%. The model ran Reynolds Averaged Navier-Stokes equations (RANS) along with k -omega viscosity model with Shear Stress Transport (SST) often recommended for simulations with thermal plumes. Study [8] presented calculation of mean age of air within air quality in residential areas. This allows to visualize dangerous zones with very old age air in a quantified manner. Study [9] presented methodology of simulating CO dispersion within Ansys Fluent, where was emphasized that the major problem in accurately predicting flow behaviour is air circulation. The study demonstrated the use of genetic algorithms to determine the optimal positioning of the sensors within a given area.
Study [10] utilizes numerical simulation to demonstrate that a suitable flow rate setting increases the efficiency of particle reduction in the operating table area by up to 54%, which can, in turn, reduce operating costs. Moreover [11], pellets were manufactured with 5% and 10% of face masks mass content, serving as a prospective recyclable fuel source for combustion or pyrolysis applications.
Study [12] demonstrated the design, modelling, and simulation of a capacitive-based PM sensor for personal air quality monitoring. The article emphasized the possibility of the use of laser-based, capacitance-based, and even acoustic-based sensors. The simulation showed the PM2,5 detection accuracy of 95% despite different particle properties. Low-cost sensors, although very effective, often shows performance that does not comply as specified by the manufacturer during testing, or the performance may deteriorate over time (drift phenomena).
In another study [2] a calibration device was constructed, and it aimed for experimental testing of PM sensors, specifically the “Plantower PMS3003”. The 700 US dollar device is able to evaluate 8 sensors within a 6% error margin with the use of the TSI DuskTrak 8530 for data validation. The article concluded that the cylindrical chamber showed 5–10% better uniformity of PM particles than in comparison with a cubic chamber due to particle loss at edges.
The study [13] utilized the simulation of Ammonium nitrate volume fraction within Ansys Fluent 2019. Under the operating conditions, a fan exerts a pressure of 12 Pa, while a rectangular ventilated chamber accommodates an inlet air flow rate ranging from 10 to 15 L per minute. Study compared CFD to experimental setup of a ventilated chamber using the k-epsilon model. The Reynolds number of the inlet air is up to 8 976 which leads to turbulent flow, this enables more favourable mixing and is generally favourable.
Study [14] determined an optimal position of four sensors in a laboratory setting based on CFD strategy. The results showed a difference from 493 ppm CO at background values to 544 ppm at optimum sensor location, which shows sensor placement is important.
This article evaluates possible improvements of the emission monitoring system that has been experimentally tested. The goal is to evaluate the effectiveness of the design changes and alterations with respect to the flow within the measuring device and key performance parameters. The article also aims to address the possibility of installing two sensors placed in series and potential entailed risks with the use of Computational Fluid Dynamics (CFD).
2 Construction of emission monitoring system
There are multiple solutions and method in aiding the 2030 goal of the European Union, by either investing in new IoT platforms, intelligent heating devices or modern filter technology. One of the most critical aspects of a smart city system is information, data itself. With a significant lack of emission monitoring systems that are financially feasible and autonomous [15], the article focuses on the construction of an emission monitoring system. The proposed design is presented in Fig. 1, a prototype constructed from heat resistant material. The design was built according to the three main functions: “to cool, to measure, to send”, which divides the design into three main sections.

First design of the monitoring device - CAD model with comments
The model of the monitoring device consisted of three main parts / sections (Fig. 2):
-
Section I. Cooling system
The temperature of some flue gases reaches temperatures up to 200 °C. Therefore, should the device be placed in proximity of the flue gases, the sensors must not be exposed to temperatures higher than 50◦C as specified by the manufacturer. A copper tube is installed in order to transfer the heat from the fumes to the environment.
-
Section II. Electronics unit
The device is equipped with a micro-computer controller Arduino Uno, a telecommunication module (Wi-Fi, SIM, or Bluetooth technology), a set of two 3.7 V Li-ion batteries to power all systems, and potentially space for a long-range radio antenna to support LoRa communication [16]. The electronics are isolated from the dust/emission by a metal slate as contact would significantly impair its lifetime (dust entering the pins, etc.).
-
Section III. Sensor / Measurement unit
The arguably most critical space is the volume in which the property of incoming air is quantified based on air quality index parameters. The sensor inlets of the are oriented such that the inlet is facing downstream the flue gasses. All sensors are connected via wires, which are guided through small drill holes accessing the electronics unit. A very brief summary of the smart sensors is provided in Table 1.

Real-life prototype made from stainless steel – the interior consisting of part (I) – Cooling unit, part (II) – Electronics unit and part (III) – Sensor & ventilator unit
2.1 Experimental testing and results of the first real-life prototype
The aim of the experimental testing was to demonstrate proof-of-concept of the emission monitoring system in out-of-laboratory environment. The experiment had been conducted outside where the sampling probe was connected to the chimney of a small heat source burning wood. All monitoring sensors were cleaned and installed into the device prior to experimental testing. The time duration of measurement was approximately 15 min and divided into three parts, where different combustion environments and conditions were monitored. The device wirelessly monitored the flue gas and compared the emission concentrations with these conditions:
-
State 1: Burning dry wood (from 0 to 150 s)
-
State 2: Mixture of wood and paper waste (from 150 to 300 s)
-
State 3: Dry grass mixture (from 350 to 400 s).
The device successfully wirelessly indicated a statistically significant increase while burning inappropriate fuel in the form of a grass mixture. After the sensors were validated with reference measurements, it was shown that the largest deviation was present in the MQ-7 sensor (CO) showing between 15 and 20% deviations. The concentration of VOC particles with respect the measurement time is depicted in Fig. 3.

Concentration of VOC with three different conditions of small heat source. Indication of dangerous and abnormal state
Despite successful experiment, the design did not fulfil the requirements of flow and sensor accuracy. Although the air and emission flow were visible and measurable, dispersing through the device the flow was very weak. This led to consider the real-life prototype design to the point where the design was meant to be changed rapidly. This was meant to ensure all the sensors were surrounded by the air and emission flow sufficiently.
3 Design considerations
To reiterate, the aim of the article is to present a redesigned model that shows improved flow and performance characteristics during operation compared to the experimental model. Along with the design of the device itself, the factors that influence the manufacturing process should be also considered [21]. In that meaning, the device should be designed in a way that is easy to make and practical to work with. From the data acquired from the experimental testing it is possible to deduce several factors that influenced the accuracy of the sensors. Different elements and perspectives were considered from the acquired qualitative and quantitative data.
-
1.
Sharp edges and corners: Any sharp edges and changes in the geometry will cause the flow to circulate and produce internal vortices. From this fact, the emission particles would circulate and accumulate within the measurement chamber, which would artificially increase the error.
-
2.
Intersensory interference: It was observed that while some sensors functioned properly connected to one Arduino Uno board, others malfunctioned and did not output the desired parameters.
-
3.
Vortices and return flow: Using smoke as a medium, large circular motion flow was observed within the measurement chamber. Therefore, it is critical to identify which elements and geometry features within the device may trigger this phenomenon.
-
4.
Pressure losses and ventilation power: The flow rate from the outlet of the device was very small during the experiment (evaluated only qualitatively, barely noticeable on hand). Therefore, it is important to understand the relationship between the fan power and pressure difference that it provides along with the flow speed within the device.
-
5.
Uneven distribution of air flow: One of the possible factors on the accuracy of the sensors lies in uneven distribution of air flow along emission concentrations. It is known that cubic or rectangular shaped volumes lead to uneven distributions of particles, specifically in the corners and edges.
3.1 Design of new geometry
The redesign will follow main three requirements that can be summarized in the points below:
-
Minimize pressure losses – As streamline geometry as possible by manufacturing techniques.
-
Minimize return flow – The air flow that flows back into the monitoring chamber must be minimized. This would cause larger emission concentration deviations with respect to true values (particles return back into the chamber and circulate within the chamber).
-
Maximize uniform distribution – The standard deviation of emission particles in the measurement plane should be as small as possible. This would lead to output readings more attuned to reality conditions.
4 Computational fluid dynamics – Improved device designs
The relationship between pressure loss and the number of sensors, or the size of the sensors is unknown. The relationship between the average velocity in the chamber is also unknown with respect to the pressure difference. Therefore, a CFD model was built in aims of evaluating several design characteristics of the monitoring device.
The geometry of the numerical model consisted of a 200 mm long sampling pipe with a diameter of 20 mm. The body consisted of a 100 × 100 × 200 mm rectangular block with 5 mm curved corners. The fans rotation and the shape of the blades produces a pressure difference that forces the air through the space. A dynamic simulation model would be rather computationally expensive; therefore, the boundary condition was used as a pressure difference on the entire cross-sectional area of the device with 12 Pa over a diameter of 60 mm [13]. The geometries of sensors were simplified into cuboid or cylindrical shapes with appropriately sized filles on all edges.
The fluent calculation solved the energy equation, used the k – omega viscosity model with Shear Stress Transfer (SST) settings. The model did not consider the heat produced by the sensors at the nominal power of 0.5 to 2 Watts. Both static and transient solvers were implemented with the convergence rate of 0.001 for all parameters while 10−6 for the momentum equation with a time step of 0.01 s and solver time of 1 s. Quadratic tetrahedral elements were used ranging from 250 000 (simplest geometry) to 1 350 000 (most complex with all four sensors). The solution approach set 1 000 iterations in order to reach convergence point.
4.1 Simulation 1 – Empty device air flow
The first conceptual design intended for simulation does not include the whole electrical part since it was done just to clarify that the sharp edges and too open space are not suitable for the air to flow streamline through the whole interior of the device. This is shown on the Fig. 4a. On the Fig. 4b a simple simulation of air flow can be seen as a clarification of very unwanted large air circulation. This would also circulate the emission particles and keep them inside of the device – that could possibly worsen the future cleaning maintenance of the device and the accuracy of the sensors.

First design: a CAD model, b Velocity magnitude Pathlines, c Velocity contour plot
Just for clarification of this design being not essential for future simulations and later experiments, the simulation of added various emission sensors was also concluded. The result of this simulation is to be seen on Fig. 5. These illustrations depict the cross section at the level of the sensor displaying the normal flow velocity. In ideal terms, the distribution should show a small smooth gradient change of velocity from the surface of the sensor. This would lead to smallest particle concentration deviations. For instance, in Fig. 5a shows that it is not possible/feasible to mount the sensors to the most left side of the chamber. The Fig. 5b. shows a more desirable gradient of flow around the surface of the dust sensor.

Y-direction air flow velocity in sensor planes – a MH - Z19, b PMS5003, c MQ − 7, d MQ – 135
4.2 Simulation 2 – New inner element
As could be seen on previous figures, it was unavoidable for the next simulations to cause the air to flow wider. Therefore, the new upgraded design of the monitoring device includes the special inner element, and it is shown on Fig. 6. The design also includes a larger curved fillet transition inlet to the measurement unit of the monitoring device.

New design features located at areas “a” and “b”
The initial design was solved using the geometry shown in Fig. 6. The first set of simulations focused on the length of the internal element. The longest variant is illustrated below as it showed significant vortices caused by circulating air flow, as shown on Fig. 7.

Example of 4 vortices (circled) caused by air flow in not-well-designed interior of the monitoring device
It seems that the shorter the inner element would be, the better will be the dispersing of the air flow around the element. However, the size of other important parts of the device is crucial for the next simulating process. It needs to be considered that the inner element is able to fit all the needed parts of the device – such as the microcomputer, Li-Ion batteries, cables etc. Thus, for the next step in simulations this shape was the chosen one – having the element approx. 130 mm in size presented in Fig. 8.

Final design of the monitoring device geometry with shortest element
4.3 Simulation 3 – Emission flow
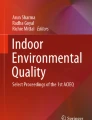
The third simulation makes use of the Species Transport Model in Ansys Fluent. A mixture of CO, CO2, O2 and H2O was used using respective mass fractions to air of 0.01, 0.02, 0.2 and 0.05, this is equivalent to a concentration of 12.247 ppm of CO and 24.5 ppm of CO2 which is above the recommendation limit in 8-hour exposure. Transient analysis is used with a time step of 0.01 s as the distribution of the air mixture changes each time step, which changes. As can be seen in Fig. 9, gravity plays a large role in the direction the CO and CO2 go to. The distribution at the sensor level is depicted on the right of the figure (part b). The top area of the measurement chamber shows a large blue section where the concentration of CO2 is only 2.45 ppm whereas the bottom area measures approximately 19.6 ppm. This deviation shows that the position of the sensor in this design is very sensitive to the measured air quality. This is not desirable as the distribution of the emission particles vary significantly. Figure 9a presents a contour plot of the CO mass concentration illustrating this undesirable flow characteristics, as seen in the strong separation of flow (in red colour). The blue region in Fig. 9b shows a CO mass fraction of only 0,0001 compared to the 0,0005 in the red region. This is a five-fold difference which concludes how important sensor positioning is important.

Transient analysis of CO2 mass fraction distribution in centre plane – Pathlines and distribution of CO2 at sensor plane (a - air flow within the device in 3D, b – horizontal look on the air flow withing the device
Figure 10 describes the same phenomena as in Fig. 9, but for CO. This substance also shows strong separation from the top and bottom side of the monitoring device (this can be seen visually on the gradient of the colour).

Transient analysis of CO molar concentration distribution in centre plane – Pathlines and distribution of CO at sensor plane
4.4 Simulation 4
The final simulation evaluates the influence of the sensors present in the selected design. A total of five sensors are placed into the device, the dust sensor is placed on the bottom as the particulate matter is heaviest and shows highest concentrations on the bottom of the device. On the sides two pairs of CO, CO2 and VOC sensors are mounted to evaluate the feasibility of mounting the sensors in series downstream as shown in Fig. 11. The simulation is static where both inlet and outlet share a pressure boundary condition of 12 Pa difference (produce by fan). Number of nodes was 1 754 352 with a gravitational vector is defined as 9.81 m/s2 in the negative z direction, where sizes of elements at the vicinity of the sensors linearly from 0.5 to 3 mm. The internal volume is 0.001888 m3 or approximately 1.9 L. At this configuration the outlet volumetric flow is 0.001366791 m3/s or approximately 1.3 L/s, which leads to a Air-Change-Rate (ACR) calculated in Eq. 1. This value satisfies the sampling requirement as sensors at the fastest of 1 or 2 s [17].

Placement of simplified five sensors from outlet of device
The total velocity is presented in Fig. 12 using the cross-section at the level of the sensors. As can be seen, the gravitational pull has a large influence on the direction of the air within the device at 12 Pa of pressure difference. The standard deviation of the velocity magnitude is 0.297 m/s whereas compared to the initial design was 0.693 m/s, which shows improvement in air flow distribution.

Placement of simplified five sensors from outlet of device
5 Conclusion
This article aims to assess potential enhancements to the emission monitoring device’s shape and building characteristics, their impact on airflow, and the effectiveness of these design changes. Additionally, it seeks to evaluate the effectiveness of alterations in relation to flow within the measuring device and key performance parameters. The article also explores the feasibility of installing two sensors in series and potential associated risks using Computational Fluid Dynamics (CFD).
The simulation has shown that the gravitational pull has a strong influence on the cross-sectional concentration of emissions. In comparison to the ventilation pressure of 12 Pa the orientation of the device deviated the main trajectory of the flow in both pure air and mixtures of CO, CO2, and water-air.
In comparison with the initial design, the standard deviation of the flow velocity in the normal direction from the improved design was almost three times lower. This means that it is almost 3 standard deviations more likely to have an even distribution of air. This indicates strong evidence that accuracy of emission concentration measurement will be increased.
To conclude the main point of the article - the results of conducted simulations showed significant improvement of air flow through the device which can allow to better measurement of emission concentrations. An improved design with an added inner element will be a case of future construction and pilot testing as it will be a crucial part of future research. This can also have a positive impact for future SMART city monitoring of air contamination, detecting, and later also eliminating the greatest air polluters.
Data availability
Not applicable.
References
Apte JS, Brauer M, Cohen AJ, Ezzati M, Pope CA III (2018) Ambient PM2.5 reduces global and regional life expectancy. Environ Sci Technol Lett 5(9):546–551. https://doi.org/10.1021/acs.estlett.8b00360
Sayahi T, Kaufman D, Becnel T, Kaur K, Butterfield AE, Collingwood S, Zhang Y, Gaillardon P-E, Kelly KE (2019) Development of a calibration chamber to evaluate the performance of low-cost particulate matter sensors. Environ Pollut 255(1):113131. ISSN 0269–7491. https://doi.org/10.1016/j.envpol.2019.113131
Bawa M, Caganova D, Szilva I, Spirkova D (2016) Importance of internet of things and big data in building smart city and what would be its challenges. Smart City 360°. SmartCity 360, SmartCity 360 (2016) (2015). Lecture Notes of the Institute for Computer Sciences, Social Informatics and Telecommunications Engineering, vol 166. Springer, Cham. https://doi.org/10.1007/978-3-319-33681-7_52
Ristvej J, Lacinák M, Ondrejka R (2020) On smart city and safe city concepts. Mob Netw Appl 25:836–845. https://doi.org/10.1007/s11036-020-01524-4
Piotrowski JZ, Orman LJ, Lucas X, Zender-Świercz E, Telejko M, Koruba D (2014) Tests of thermal resistance of simulated walls with the reflective insulation. EPJ Web of Conferences 67:02095. https://doi.org/10.1051/epjconf/20146702095
Fedorko G, Molnar V, Honus S, Neradilova H, Kampf R (2018) The application of simulation model of a milk run to identify the occurrence of failures. Int J Simul 17(3):444–457. https://doi.org/10.2507/IJSIMM17(3)440
Pei P (2018) CFD analysis of dispersion of CO2 in occupied space: Effect of sensor position, Pennsylvania State University, Master Thesis
Yang L, Ye M, He B-J (2013) CFD simulation research on residental indoor air quality. Sci Total Environ 472C:1137–1144. https://doi.org/10.1016/j.scitotenv.2013.11.118. (ISSN 0048-9697)
Mousavi MS, Ashrafi K, Motlagh MSP, Niksokhan MH, Vosoughifar H (2018) Design of a correlated validated CFD and genetic algorithm model for optimized sensors placement for indoor air quality monitoring. Heat Mass Transfer 54:509–521. https://doi.org/10.1007/s00231-017-2138-9
Mičko P, Hečko D, Kapjor A, Nosek R, Kolková Z, Hrabovský P, Čajová Kantová N (2022) Impact of the speed of airflow in a cleanroom on the degree of air pollution. Appl Sci 12(5):2466. https://doi.org/10.3390/app12052466
Čajová Kantová N, Cibula R, Szlek A, Čaja A, Nosek R, Belany P (2023) The energy assessment of COVID-19 medical waste as a potential fuel. Energy Rep 9:4995–5003. https://doi.org/10.1016/j.egyr.2023.04.018
Oluwasanya PW, Rughoobur G, Occhipinti LG (2020) Design, modelling and simulation of a capacitive size-discriminating particulate matter sensor for personal air quality monitoring. IEEE Sens J 20:4. https://doi.org/10.1109/jsen.2019.2950775
Zhang H, Ruan R, Choudhary S, Tan H, Biswas P (2021) Numerical and experimental investigation on the performance of a ventilated chamber for low-cost PM sensor calibration. J Aerosol Sci 151:105680. https://doi.org/10.1016/j.jaerosci.2020.105680. (ISSN 0021-8502)
Waeytens J, Durand S, Sadr S (2019) Experimental Validation of a CFD-based air quality sensor placement strategy to localize indoor source. Conference: Building Simulation 2019. https://doi.org/10.26868/25222708.2019.210177
Liu J, Zhang Z (2023) Integrated energy carbon emission monitoring and digital management system for smart cities. Front Energy Res 11:1221345. https://doi.org/10.3389/fenrg.2023.1221345
González E, Casanova-Chafer J, Romero A, Vilanova X, Mitrovics J, Llobet E (2020) LoRa sensor network development for air quality monitoring or detecting gas leakage events. Sensors 20:6225. https://doi.org/10.3390/s20216225
PMS5003 Series Manual Datasheet by Adafruit Industries LLC, https://www.digikey.com/htmldatasheets/production/2903006/0/0/1/pms5003-series-manual.html. Accessed 25 June 2023
Intelligent Infrared CO2 Module (Model : MH-Z19) User’s Manual, https://www.winsen-sensor.com/d/files/PDF/Infrared%20Gas%20Sensor/NDIR%20CO2%20SENSOR/MH-Z19%20CO2%20Ver1.0.pdf. Accessed 24 June 2023
Technical Data MQ-7 Gas Sensor https://www.sparkfun.com/datasheets/Sensors/Biometric/MQ-7.pdf. Accessed 23 June 2023
Air Quality Gas Sensor (Model : MQ135) Manual. https://www.winsen-sensor.com/d/files/PDF/Semiconductor%20Gas%20Sensor/MQ135%20(Ver1.4)%20-%20Manual.pdf. Accessed 24 June 2023
Balog M, Dupláková D, Szilágyi E, Mindas M, Knapčíková L (2016) Optimization of time structures in manufacturing management by using scheduling software lekin. TEM J 5(3):319–323. https://doi.org/10.18421/TEM53-11
Acknowledgements
This publication has been produced with the support of the projects: APVV-21-0452 Impact of using small electrostatic precipitators to reduce particulate pollutants in domestic fuel combustion, KEGA 028ŽU-4/2023 Implementation of SMART solutions in the regulation of energy machines and equipment into the pedagogical process and VEGA 1/0671/23 Research and development of SMART solutions for monitoring the production of emissions from small heat sources.
Funding
Open access funding provided by The Ministry of Education, Science, Research and Sport of the Slovak Republic in cooperation with Centre for Scientific and Technical Information of the Slovak Republic Agentúra na Podporu Výskumu a Vývoja, APVV-21-0452.
Kultúrna a Edukacná Grantová Agentúra MŠVVaŠ SR, 028ŽU-4/2023.
Vedecká Grantová Agentúra MŠVVaŠ SR a SAV, 1/0671/23.
Author information
Authors and Affiliations
Contributions
M.H. made conceptualization, data validation and referencing relevant scientific literature and contributed funding acquisition. M.N. wrote the original draft, developed the CFD model along documentation of the methodology within the manuscript. J.J. was responsible for the consultation of the theoretical knowledge in emissions and pollutants as well as reviewing the concept of the manuscript. All authors participated in all parts of the article to an approximately equal extent. All authors reviewed the manuscript.
Corresponding author
Ethics declarations
Ethics approval
Not applicable.
Competing interests
The authors declare no competing interests.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Holubčík, M., Jandačka, J. & Nicolanská, M. Improvement of Emission Monitoring System Accuracy in Aims of Increasing Air Quality of Smart City. Mobile Netw Appl (2023). https://doi.org/10.1007/s11036-023-02248-x
Accepted:
Published:
DOI: https://doi.org/10.1007/s11036-023-02248-x