
Abstract
According to a pre-strain strategy, a wrinkled structure for measuring the contact pressure between the intestinal wall and the vibro-impact capsule robot is proposed for the potential application of early bowel cancer detection. An analytical model of this wrinkled structure is established by using an energy method. Based on Hertz theory, a theoretical expression for the elastic modulus of bowel tissue and the amplitude of this structure, so the current generated, is obtained. It is found that the sensitivity of the structure is dependent on its wrinkled amplitude. Our simulation results show that, for a static capsule, the greater the contact pressure between the wrinkled structure and the capsule is, the greater the current of this mechanism is generated, indicating the bowel tissue becomes stiffer. For a dynamic capsule, our simulation results reveal that the faster the average velocity of the capsule is, the greater the current is generated. These relationships are explained by modelling the hoop pressure of the intestine on the capsule robot validated via finite element analysis. The findings of this paper can provide design guidelines for fabricating the proposed mechanism integrated onto the vibro-impact capsule robot for diagnostic and locomotion tracking purposes.









Similar content being viewed by others

Data availability
The numerical data sets generated and analysed during the present study are available from the corresponding author on reasonable request.
References
Dupont PE, Nelson BJ, Goldfarb M, Hannaford B, Menciassi A, O’Malley MK, Simaan N, Valdastri P, Yang GZ (2021) A decade retrospective of medical robotics research from 2010 to 2020. Sci Robot 6(60):eabi8017
Slawinski PR, Obstein KL, Valdastri P (2015) Capsule endoscopy of the future: what’s on the horizon? World J Gastroenterol WJG 21(37):10528
Singeap A-M, Stanciu C, Trifan A (2016) Capsule endoscopy: the road ahead. World J Gastroenterol 22(1):369
Sahafi A, Wang Y, Rasmussen C, Bollen P, Baatrup G, Blanes-Vidal V, Herp J, Nadimi E (2022) Edge artificial intelligence wireless video capsule endoscopy. Sci Rep 12(1):1–10
Ciuti G, Caliò R, Camboni D, Neri L, Bianchi F, Arezzo A, Koulaouzidis A, Schostek S, Stoyanov D, Oddo C et al (2016) Frontiers of robotic endoscopic capsules: a review. J Micro-Bio Robot 11(1):1–18
Mahmood S, Schostek S, Schurr MO, Bergsland J, Balasingham I, Fosse E (2022) Robot-assisted magnetic capsule endoscopy; navigating colorectal inclinations. Minim Invasive Therapy Allied Technol 31(6):930–938
Schiffman JD, Fisher PG, Gibbs P (2015) Early detection of cancer: past, present, and future. Am Soc Clin Oncol Edu Book 35(1):57–65
Crosby D, Lyons N, Greenwood E, Harrison S, Hiom S, Moffat J, Quallo T, Samuel E, Walker I (2020) A roadmap for the early detection and diagnosis of cancer. Lancet Oncol 21(11):1397–1399
Gerson LB, Fidler JL, Cave DR, Leighton JA (2015) ACG clinical guideline: diagnosis and management of small bowel bleeding. Off J Am College Gastroenterol ACG 110(9):1265–1287
Liu Y, Tian J, Manfredi L, Terry BS, Prasad S, Rahman I, Marlicz W, Koulaouzidis A (2022) A survey of small bowel modelling and its applications for capsule endoscopy. Mechatronics 83:102748
Sinnott MD, Cleary PW, Harrison SM (2017) Peristaltic transport of a particulate suspension in the small intestine. Appl Math Modell 44:143–159
Valdastri P, Simi M, Webster RJ III (2012) Advanced technologies for gastrointestinal endoscopy. Ann Rev Biomed Eng 14:397–429
Barducci L, Norton JC, Sarker S, Mohammed S, Jones R, Valdastri P, Terry BS (2020) Fundamentals of the gut for capsule engineers. Progress Biomed Eng 2(4):042002
Ciuti G, Menciassi A, Dario P (2011) Capsule endoscopy: from current achievements to open challenges. IEEE Rev Biomed Eng 4:59–72
Le VH, Hernando L-R, Lee C, Choi H, Jin Z, Nguyen KT, Go G, Ko S-Y, Park J-O, Park S (2015) Shape memory alloy-based biopsy device for active locomotive intestinal capsule endoscope. Proc Inst Mech Eng Part H J Eng Med 229(3):255–263
Hanscom M, Cave DR (2022) Endoscopic capsule robot-based diagnosis, navigation and localization in the gastrointestinal tract. Front Robot AI 9:896028
Kwack WG, Lim YJ (2016) Current status and research into overcoming limitations of capsule endoscopy. Clin Endosc 49(1):8–15
Charoen A, Guo A, Fangsaard P, Taweechainaruemitr S, Wiwatwattana N, Charoenpong T, Rich HG (2022) Rhode island gastroenterology video capsule endoscopy data set. Sci Data 9(1):1–6
Alazemi AJ, Iqbal A (2022) A compact and wideband MIMO antenna for high-data-rate biomedical ingestible capsules. Sci Rep 12(1):1–13
Zhou H, Alici G (2019) A novel magnetic anchoring system for wireless capsule endoscopes operating within the gastrointestinal tract. IEEE/ASME Trans Mechatron 24(3):1106–1116
Kim HM, Yang S, Kim J, Park S, Cho JH, Park JY, Kim TS, Yoon E-S, Song SY, Bang S (2010) Active locomotion of a paddling-based capsule endoscope in an in vitro and in vivo experiment (with videos). Gastrointest Endosc 72(2):381–387
Sun Z-J, Ye B, Qiu Y, Cheng X-G, Zhang H-H, Liu S (2014) Preliminary study of a legged capsule robot actuated wirelessly by magnetic torque. IEEE Trans Magn 50(8):1–6
Gao J, Yan G (2015) Locomotion analysis of an inchworm-like capsule robot in the intestinal tract. IEEE Trans Biomed Eng 63(2):300–310
Zhang H, Yan Y, Gu Z, Wang Y, Sun T (2016) Friction enhancement between microscopically patterned polydimethylsiloxane and rabbit small intestinal tract based on different lubrication mechanisms. ACS Biomater Sci Eng 2(6):900–907
Dickson I (2018) Gas-sensing gut capsules. Nature Rev Gastroenterol Hepatol 15(3):131
Srinivasan SS, Alshareef A, Hwang AV, Kang Z, Kuosmanen J, Ishida K, Jenkins J, Liu S, Madani WAM, Lennerz J et al (2022) Robocap: Robotic mucus-clearing capsule for enhanced drug delivery in the gastrointestinal tract. Sci Robot 7(70):eabp9066
Nguyen KT, Hoang MC, Choi E, Kang B, Park J-O, Kim C-S (2020) Medical microrobot-A drug delivery capsule endoscope with active locomotion and drug release mechanism: proof of concept. Int J Control Autom Syst 18(1):65–75
Ye D, Xue J, Yuan S, Zhang F, Song S, Wang J, Meng MQ-H (2022) Design and control of a magnetically-actuated capsule robot with biopsy function. IEEE Trans Biomed Eng 69(9):2905–2915
Guo B, Liu Y, Prasad S (2019) Modelling of capsule-intestine contact for a self-propelled capsule robot via experimental and numerical investigation. Nonlinear Dyn 98(4):3155–3167
Kawano S, Kojima M, Higuchi Y, Sugimoto M, Ikeda K, Sakuyama N, Takahashi S, Hayashi R, Ochiai A, Saito N (2015) Assessment of elasticity of colorectal cancer tissue, clinical utility, pathological and phenotypical relevance. Cancer Sci 106(9):1232–1239
Chen L-D, Wang W, Xu J-B, Chen J-H, Zhang X-H, Wu H, Ye J-N, Liu J-Y, Nie Z-Q, Lu M-D et al (2017) Assessment of rectal tumors with shear-wave elastography before surgery: comparison with endorectal us. Radiology 285(1):279–292
Cortegoso Valdivia P, Robertson AR, De Boer NK, Marlicz W, Koulaouzidis A (2021) An overview of robotic capsules for drug delivery to the gastrointestinal tract. J Clin Med 10(24):5791
Liu L, Towfighian S, Hila A (2015) A review of locomotion systems for capsule endoscopy. IEEE Rev Biomed Eng 8:138–151
Kim J-S, Sung I-H, Kim Y-T, Kwon E-Y, Kim D-E, Jang Y (2006) Experimental investigation of frictional and viscoelastic properties of intestine for microendoscope application. Tribol Lett 22(2):143–149
Kim J, Sung I, Kim Y, Kim D, Jang Y (2007) Analytical model development for the prediction of the frictional resistance of a capsule endoscope inside an intestine. Proc Inst Mech Eng Part H J Eng Med 221(8):837–845
Zhou H, Alici G, Than TD, Li W (2012) Modeling and experimental investigation of rotational resistance of a spiral-type robotic capsule inside a real intestine. IEEE/ASME Trans Mechatron 18(5):1555–1562
Zhang C, Liu H, Tan R, Li H (2012) Modeling of velocity-dependent frictional resistance of a capsule robot inside an intestine. Tribol Lett 47(2):295–301
Guo B, Ley E, Tian J, Zhang J, Liu Y, Prasad S (2020) Experimental and numerical studies of intestinal frictions for propulsive force optimisation of a vibro-impact capsule system. Nonlinear Dyn 101(1):65–83
Tian J, Liu Y, Chen J, Guo B, Prasad S (2021) Finite element analysis of a self-propelled capsule robot moving in the small intestine. Int J Mech Sci 206:106621
Slawinski PR, Oleynikov D, Terry BS (2015) Intestinal biomechanics simulator for robotic capsule endoscope validation. J Med Eng Technol 39(1):54–59
Woo SH, Kim TW, Mohy-Ud-Din Z, Park IY, Cho J-H (2011) Small intestinal model for electrically propelled capsule endoscopy. Biomed Eng Online 10(1):1–20
Li P, Kothari V, Terry BS (2015) Design and preliminary experimental investigation of a capsule for measuring the small intestine contraction pressure. IEEE Trans Biomed Eng 62(11):2702–2708
Li P, Kreikemeier-Bower C, Xie W, Kothari V, Terry BS (2017) Design of a wireless medical capsule for measuring the contact pressure between a capsule and the small intestine. J Biomech Eng 139(5):051003
Camboni D, Massari L, Chiurazzi M, Caliò R, Alcaide JO, D’Abbraccio J, Mazomenos E, Stoyanov D, Menciassi A, Carrozza MC, Dario P, Oddo CM, Ciuti G (2021) Endoscopic tactile capsule for non-polypoid colorectal Tumour detection. IEEE Trans Med Robot Bionics 3(1):64–73
Choong C-L, Shim M-B, Lee B-S, Jeon S, Ko D-S, Kang T-H, Bae J, Lee SH, Byun K-E, Im J et al (2014) Highly stretchable resistive pressure sensors using a conductive elastomeric composite on a micropyramid array. Adv Mater 26(21):3451–3458
Cai Y-W, Zhang X-N, Wang G-G, Li G-Z, Zhao D-Q, Sun N, Li F, Zhang H-Y, Han J-C, Yang Y (2021) A flexible ultra-sensitive triboelectric tactile sensor of wrinkled PDMS/MXene composite films for E-skin. Nano Energy 81:105663
Khang D-Y, Jiang H, Huang Y, Rogers JA (2006) A stretchable form of single-crystal silicon for high-performance electronics on rubber substrates. Science 311(5758):208–212
Bi H, Wang B, Su C, Zhang B, Ouyang H, Huang Y, Deng Z (2021) Buckling Behaviour of a stiff thin film on a finite-thickness bi-layer substrate. Int J Solids Struct 219:177–187
Bi H, Wang B, Ouyang H, Deng Z, Zhang B (2021) Nonlinear dynamic instability of wrinkled film-substrate structure under axial load. Nonlinear Dyn 106(4):2807–2827
Liu Y, Páez Chávez J (2017) Controlling multistability in a vibro-impact capsule system. Nonlinear Dyn 88(2):1289–1304
Páez Chávez J, Liu Y, Pavlovskaia E, Wiercigroch M (2016) Path-following analysis of the dynamical response of a piecewise-linear capsule system. Commun Nonlinear Sci Numer Simul 37:102–114
Su M, Xu W, Zhang Y, Yang G (2021) Response of a vibro-impact energy harvesting system with bilateral rigid stoppers under gaussian white noise. Appl Math Modell 89:991–1003
Liu Y, Pavlovskaia E, Hendry D, Wiercigroch M (2013) Vibro-impact responses of capsule system with various friction models. Int J Mech Sci 72:39–54
Gu X, Deng Z (2018) Dynamical analysis of vibro-impact capsule system with Hertzian contact model and random perturbation excitations. Nonlinear Dyn 92(4):1781–1789
Van CN, Ho K-T, La N-T, Ngo Q-H, Nguyen K-T, Hoang T-D, Chu N-H, Nguyen V-D et al (2022) Dynamic response of vibro-impact capsule moving on the inclined track and stochastic slope. Meccanica 58(2–3):421–439
Ma Y, Xue Y, Jang K-I, Feng X, Rogers JA, Huang Y (2016) Wrinkling of a stiff thin film bonded to a pre-strained, compliant substrate with finite thickness. Proc R Soc A Math Phys Eng Sci 472(2192):20160339
Huang Z, Hong W, Suo Z (2005) Nonlinear analyses of wrinkles in a film bonded to a compliant substrate. J Mech Phys Solids 53(9):2101–2118
Wang B, Zhang B, Bi H, Ouyang H, Huang Y, Wang S (2022) Theoretical predictions and evolutions of wrinkles in the film-intermediate layer-substrate structure under compression. Int J Solids Struct 250:111699
Chen L, Lee H, Guo Z, McGruer NE, Gilbert K, Mall S, Leedy KD, Adams GG (2007) Contact resistance study of noble metals and alloy films using a scanning probe microscope test station. J Appl Phys 102(7):074910
Kwon H, Jang S-S, Park Y-H, Kim T-S, Kim Y-D, Nam H-J, Joo Y-C (2008) Investigation of the electrical contact behaviors in au-to-au thin-film contacts for RF mems switches. J Micromech Microeng 18(10):105010
Fan Z, Cong Y, Zhang Z, Li R, Wang S, Yan K (2019) Shear wave elastography in rectal cancer staging, compared with endorectal ultrasonography and magnetic resonance imaging. Ultrasound Med Biol 45(7):1586–1593
Yan Y, Liu Y, Manfredi L, Prasad S (2019) Modelling of a vibro-impact self-propelled capsule in the small intestine. Nonlinear Dyn 96(1):123–144
Zhang J, Liu Y, Zhu D, Prasad S, Liu C (2022) Simulation and experimental studies of a vibro-impact capsule system driven by an external magnetic field. Nonlinear Dyn 109(3):1501–1516
Liu Y, Páez Chávez J, Guo B, Birler R (2020) Bifurcation analysis of a vibro-impact experimental rig with two-sided constraint. Meccanica 55(12):2505–2521
Acknowledgements
The authors acknowledge the support from the National Natural Science Foundation of China (No. 12172282), the State Key Laboratory of Mechanics and Control of Mechanical Structures (Nanjing University of Aeronautics and Astronautics, MCMS-E-0221K01), and the State Key Laboratory of Intelligent Manufacturing Equipment and Technology (Huazhong University of Science and Technology, IMETKF2023007). Mr Jiyuan Tian would like to acknowledge the financial support from China Scholarship Council for his CSC-Exeter PhD scholarship (award no. 201908060172). The first author, Dr Haohao Bi, would like to thank the support from the China Scholarship Council (CSC) which sponsors his visit to the University of Exeter where this work was conducted.
Author information
Authors and Affiliations
Corresponding authors
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest concerning the publication of this manuscript.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
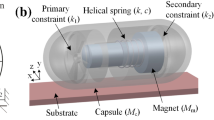
When the magnetic inner mass is excited by an external magnetic field, the capsule moves in the intestine, and its motion can be modelled via the following equations,
where \(F_{\textrm{e}}= P_{\textrm{d}}\cos (\omega t)\) is the excitation, \(F_{\textrm{f}}\) denotes environmental resistance. According to the contact case between the magnet and the capsule, the mutual interactive force \(F_{\textrm{i}}\) can be written as
where \(Z_{\textrm{m}}\) and \(V_{\textrm{m}}\) are the displacement and velocity of the magnet, \(Z_{\textrm{c}}\) and \(V_{\textrm{c}}\) are the displacement and velocity of the capsule, and \(G_1 = 1.6~{\textrm{mm}}\) is a gap between the magnet and the constraint. Because the friction models have no significant effect on the dynamics of the capsule, the frictional resistance acting on the capsule \(F_{\textrm{f}}\) is modelled as the Coulomb friction and is expressed as
where \(P_{\textrm{f}} = 2.5~{\textrm{N}}\) denotes the static friction and is identified by experiment [38].
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Bi, H., Tian, J., Zhang, B. et al. Utilisation of a wrinkled film-based structure for the sensing measurement of a vibro-impact capsule robot. Meccanica 58, 2151–2164 (2023). https://doi.org/10.1007/s11012-023-01712-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-023-01712-y