
Abstract
The geometrically nonlinear vibrations of simply supported double-layer graphene sheet systems under in-plane magnetic field are considered in the presented manuscript. The interaction between layers is taken into account due to van der Waals forces. The investigation is based on the nonlocal elasticity theory, Kirchhoff plate theory and von Kármán theory. The effect of the magnetic field is due to the Lorentz force based on Maxwell’s equations. The governing equations are used in mixed form by introducing the stress Airy function. The analytical presentation of the nonlinear frequency ratio for in-phase vibration and anti-phase vibration modes is presented. It is shown that the nonlocal parameter in the compatibility equation can significantly change the vibration characteristics.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The modern industry is developing rapidly in the field of nanotechnology. This fact leads to the need for new studies of the nanostructures (nanobeams, nanoplates, nanoshells) used in the design of sensors, resonators, nanoelectromechanical systems (NEMS), nanooptomechanical structures, energy storage systems, DNA detectors, drug delivery [1,2,3,4,5,6]. One of the important objects of analysis is graphene structures because this nanomaterial has excellent mechanical, electrical, and thermal characteristics [7,8,9]. By the experimental and theoretical studies [10, 11] of nanoobjects, it was also observed that the appearance of size-effect and influence of atomic forces cannot be detected by the classical (local) theory. In order to obtain accurate outcomes, nonclassical continuum theories have been developed. Here it is pertinent to mention the theory of micropolar elasticity [12], the couple stress theory [13,14,15], the nonlocal elasticity theory [16], the strain gradient theory [17]. In the present work, we employed the nonlocal elasticity theory, which is based on the fact that the stress at a given point depends on strains at all other points of structure. This theory was successfully used in various linear problems of single-layer plates [18,19,20,21,22,23] and multi-layer plate system. Pradhan and Phadikar in [24] applied the Navier method for linear vibration problems of single and double-layer plates based on the classical plate theory and first-order shear deformation theory. Bonded linear vibrations of double nanoplate systems are investigated by Murmu and Adhikari [25]. Double orthotropic nanoplates embedded in an elastic medium are investigated by Pouresmaeeli et al. [26].
Nonlinear vibrations of single-layer nano/microplates are studied by Ajri et al. [27] with the help of both the Bubnov–Galerkin and the Runge–Kutta methods. The paper of Ebrahimy and Hosseini [28] is devoted to investigation of nonlinear electroelastic vibration behaviour of double viscoelastic nanoplates by the generalized differential quadrature method. Nonlinear free vibrations of double-layer graphene sheet system located in a polymer matrix aroused by the nonlinear van der Waals interactions are analyzed by Mahdavi et al. [29] via the harmonic balance method. Whereas the differential quadrature method was used for nonlinear vibration analysis of a double-layer graphene sheet by Ravandi et al. [30]. The publication of Jomehzadeh and Saidi [31] is aimed at the nonlinear vibrations of orthotropic multi-layer plates. Mahmoudpour et al. [32] considered FG double-layer plates based on nonlocal strain gradient theory. The Galerkin method in combination with the harmonic balance method are employed in [31, 32]. The nonlocal viscoelastic double-layer nanoplates were studied on the basis of the Galerkin method and the multiple scale method by Wang et al. [33, 34].
Despite notable studies in the considered field, there are still many questions requiring additional research. In the mentioned works [31,32,33,34] related to geometrically nonlinear vibrations of multi-layer nanoplate system, where the authors use a mixed form of governing equations and introduce the Airy function, it is used the compatibility equation in classical form (without taking into account the nonlocal parameter). Note, that a similar approach was applied to single-layer magneto-electro-elastic nanoplates by Farajpour et al. [35], where the influence of the nonlocal parameter in the compatibility equation was indicated. Thus, in contrast to the listed works for multi-layer systems, we propose employing the size-dependent compatibility equation, where the nonlocal parameter is introduced based on the nonlocal constitutive relation.
Also, an obviously important issue is the study of the behaviour of the system under the influence of additional factors, in particular, affected by a magnetic field. Vibrations of single-layer graphene sheets in the uniaxial magnetic field are investigated by Murmu et al. [36] and Kiani [37], where the Navier method is applied. Ritz method for vibration analysis of embedded single-layer graphene sheets in a magnetic field is employed by Mazur and Awrejcewicz [38]. In addition, Zhang et al. [39] analysed vibrations of quadrilateral graphene sheets subjected to an in-plane magnetic field by the element-free kp-Ritz method. Stamenkovíc Atanasov et al. [40] devoted their work to the analysis of double-layer nanoplates under the influence of the magnetic field within the nonlocal plate theory, and the study was carried out on the basis of linear relations. Based on the nonlocal theory, the influence of in-plane magnetic field on the viscoelastic orthotropic multi-nanoplate system embedded in a viscoelastic medium is analysed by Karličić et al. [41]. Vibrations of double bonded orthotropic graphene sheets in 2D-magnetic field and subjected to biaxial in-plane forces are considered by Ghorbanpour Arani [42]. Sobhy and Radwan [43] studied hygrothermal bending of sandwich CNTs-reinforced microplates with viscoelastic core embedded in a viscoelastic medium in 2D magnetic filed based on application of the Navier method. In reviewed works, the study of double- and multi-layer systems in a magnetic field is performed employing the mathematical model based on linear plate theory. It should be emphasized that in the case of single-layer nanoplates, new publications, where the mathematical model is based on nonlinear von Kármán plate theory, have recently appeared. Ghadiri and Hosseini [44] investigated nonlinear vibration and dynamic instability of single-layer graphene sheet under parametric excitation, magnetic field action with help of the Bubnov–Galerkin approach combined with multiple time scales method. Nonlinear vibrations of single-layer graphene sheet in a magnetic field are investigated by Bubnov–Galerkin method in the work [45]. Therefore, the problem of geometrically nonlinear vibration of double-layer nanoplate system in a magnetic field is challenging and still open.
Summing up, the novelty of the work is an investigation of geometrically nonlinear vibration of a double-layer graphene sheet system in a uniaxial magnetic field, whereas the mathematical model contains size-dependent equations including compatibility equation. The main objectives are to determine whether the contribution of the nonlocal compatibility equation is significant, and also to analyze the influence of the Lorentz force caused by the magnetic field on the response curve for both in-phase and anti-phase vibration modes.
2 Mathematical formulation
2.1 Single-layer nanoplate
For the small-scale study of the single-layer graphene sheet (SLGS) the nonlocal elasticity theory is used. According to that theory the stress at a point is a function of strains at all points in the body, and the constitutive relation for the nonlocal stress tensor in an integral form takes the following form [16, 46]
where \(\sigma\), \(\sigma '\) are nonlocal and local stress tensors, \(K \left( |{X} ^ {'} -X|,\tau \right)\) is the nonlocal modulus, \(\tau =e_0\alpha /l\), \(\alpha\) is the internal characteristic length, \(e_0\) stands for a constant appreciate to material, whereas l is external characteristics length. Due to complexity of the integral form, Eq. (1), it is transformed [46] to the differential form:
where \(\mu =(e_0 \alpha )^2\) stands for the nonlocal parameter and \(\nabla ^2=\frac{\partial ^2}{\partial x^2} +\frac{\partial ^2}{\partial y^2}\) is the Laplacian operator.
In the case of isotropic Kirchhoff’s plate, the constitutive relation with regard to Eq. (2) are presented in the following form
where E is Young’s modulus, \(\nu\) is Poisson’s ratio and \(\sigma _{xx}, \sigma _{yy}\), \(\sigma _{xy}\) are components of stress tensor \(\sigma\), whereas \(\varepsilon _{xx}, \varepsilon _{yy}, \varepsilon _{xy}\) are components of strain tensor.
According to the von Kármán nonlinear theory the components of strain tensor have the following form [47]
where u, v, w are displacements in x, y and z directions, respectively. The simple transformation of the relations (4) gives the compatibility equation for strains in the nanoplate middle surface:
The system of the governing equations for nonlinear vibrations of isotropic plate is yielded by application of the the Hamilton’s principle as follows [47]:
with
In Eqs. (6), (7) h stands for thickness and \(\rho\) is the density of the plate. The resultant in-plane forces and moments are as follows [47]:
In view of Eqs. (3), (9), (10), the next relations can be formulated as [48]
Taking into account Eq.(4), the relations (12) are written explicitly
where \(D=\frac{Eh^3}{12(1-\nu ^2)}\) represents flexural nanoplate rigidity. In current investigation we use the mixed form of the governing equations, so the stress Airy function is introduced by the following relations:
and propagation of waves in longitudinal equations is neglected. The Eq. (7) in terms of deflection w and stress Airy function F, considering (13) and (14), can be presented in the following counterpart form
where \(\varDelta ^2=\left(\frac{\partial ^2}{\partial x^2} +\frac{\partial ^2}{\partial y^2}\right)^2\). Expressing the strains \(\varepsilon _{xx}^0, \varepsilon _{yy}^0, \varepsilon _{xy}^0\) from Eq. (11) and substituting them into the the compatibility Eq. (5), the second equation connecting the stress function F and deflection w is obtained
The differential operators L(w, F), L(w, w) in (15), (16) are defined below
2.2 Double-layer nanoplate system
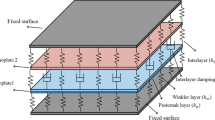
Now we consider the double-layer graphene sheet system (DLGSs). Interaction between two layers regards the action of van der Waals force (vdW) [49, 50]. This interaction is often modeled as the Winkler foundation [33], (Fig. 1). We assume that both nanoplates have the same mechanical properties. Taking into account the equations (15) and (16) the governing equations for each layer are taken as:

Diagram of double-layer graphene sheet system
1-st nanoplate:
where c stands for interaction coefficient. System of of the governing equations for the 1-st nanoplate is supplemented with the boundary conditions:
-
(1)
simply supported movable edges
$$\begin{aligned} \begin{aligned} w_1=0,\frac{{\partial }^2w_1}{{\partial }x^2}+\nu \frac{{\partial }^2w_1}{{\partial }y^2}=0, \frac{{\partial }^2F_1}{{\partial }x{\partial }y}=0,\\ \int _0^b\frac{{\partial }^2F_1}{{\partial }y^2}dy=0,x=0,a, \\ w_1=0,\frac{\partial ^2w_1}{\partial y^2}+\nu \frac{{\partial }^2w_1}{{\partial }x^2}=0, \frac{{\partial }^2F_1}{{\partial }x{\partial }y}=0,\\ \int _0^a\frac{{\partial }^2F_1}{{\partial }x^2}dx=0,y=0,b; \end{aligned} \end{aligned}$$(19) -
(2)
simply supported immovable edges:
$$\begin{aligned} \begin{aligned} w_1=0,\frac{{\partial }^2w_1}{{\partial }x^2}+\nu \frac{{\partial }^2w_1}{{\partial }y^2}=0, \frac{{\partial }^2F_1}{{\partial }x{\partial }y}=0,u_1=0,x=0,a, \\ w_1=0,\frac{{\partial }^2w_1}{{\partial }y^2}+\nu \frac{{\partial }^2w_1}{{\partial }x^2}=0, \frac{{\partial }^2F_1}{{\partial }x{\partial }y}=0,v_1=0, y=0,b,\\ u_1=\int _0^x((1-\mu \nabla ^2 )\frac{1}{Eh}\left(\frac{\partial ^2F_1}{\partial y^2}-\nu \frac{\partial ^2F_1}{\partial x^2}\right)-\frac{1}{2}\left(\frac{\partial w_1}{\partial x})^2\right) dx ,\\ v_1=\int _0^y((1-\mu \nabla ^2 )\frac{1}{Eh}\left(\frac{\partial ^2F_1}{\partial x^2}-\nu \frac{\partial ^2F_1)}{\partial y^2}\right)-\frac{1}{2}\left(\frac{\partial w_1}{\partial y})^2\right) dy ; \end{aligned} \end{aligned}$$(20)
2-nd nanoplate:
the following boundary conditions for \(w_2\) and \(F_2\) are taken:
-
(1)
simply supported movable edges
$$\begin{aligned} \begin{aligned} w_2=0,\frac{{\partial }^2w_2}{{\partial }x^2}+\nu \frac{{\partial }^2w_2}{{\partial }y^2}=0, \frac{{\partial }^2F_2}{{\partial }x{\partial }y}=0,\\ \int _0^b\frac{{\partial }^2F_2}{{\partial }y^2}dy=0,x=0,a, \\ w_2=0,\frac{\partial ^2w_2}{\partial y^2}+\nu \frac{{\partial }^2w_2}{{\partial }x^2}=0, \frac{{\partial }^2F_2}{{\partial }x{\partial }y}=0,\\\int _0^a\frac{{\partial }^2F_2}{{\partial }x^2}dx=0,y=0,b; \end{aligned} \end{aligned}$$(22) -
(2)
simply supported immovable edges
$$\begin{aligned} \begin{aligned} w_2=0,\frac{{\partial }^2w_2}{{\partial }x^2}+\nu \frac{{\partial }^2w_2}{{\partial }y^2}=0, \frac{{\partial }^2F_2}{{\partial }x{\partial }y}=0,u_2=0,x=0,a, \\ w_2=0,\frac{{\partial }^2w_2}{{\partial }y^2}+\nu \frac{{\partial }^2w_2}{{\partial }x^2}=0, \frac{{\partial }^2F_2}{{\partial }x{\partial }y}=0,v_2=0, y=0,b,\\ u_2=\int _0^x((1-\mu \nabla ^2 )\frac{1}{Eh}(\frac{\partial ^2F_2}{\partial y^2}-\nu \frac{\partial ^2F_2}{\partial x^2})-\frac{1}{2}(\frac{\partial w_2}{\partial x})^2) dx ,\\ v_2=\int _0^y((1-\mu \nabla ^2 )\frac{1}{Eh}(\frac{\partial ^2F_2}{\partial x^2}-\nu \frac{\partial ^2F_2)}{\partial y^2})-\frac{1}{2}(\frac{\partial w_2}{\partial y})^2) dy . \end{aligned} \end{aligned}$$(23)
3 Vibrations of double-layer nanoplate system in the magnetic field
The considered DLGSs is supposed to be under the in-plane uniaxial magnetic field, that can influence significantly on its behaviour [36, 37, 40]. The vector of magnetic field strength is defined as
Following [37, 45] and taking into account Maxwell’s relations one can get the Lorentz force for Kirchhoff–Love plate in the form
where \(\eta\) is the magnetic permeability. Thus, the governing system for DLGSs subjected to in-plane uniaxial magnetic field takes the form
4 Nonlinear vibrations of double-layer nanoplate system
We present the deflections \(w_i(x,y,t), i=1,2\) of each nanoplate as
where W(x, y) is shape function and \(y_i(t)\) is generalized coordinate for i-th layer. The shape function depends on the shape of the plate and boundary conditions, and in the considered case of rectangular simply supported nanoplate with sides a and b it has the form
Moreover, substitution (27) into the second and fourth equations of the governing system (26) yields the expressions for stress functions respectively:
where
and \(p_1,p_2\) are defined from the boundary conditions. Thus, for movable boundary conditions (19), (22) \(p_1=0, p_2=0\), while for immovable boundary conditions (20), (23) these coefficients are determined by the following formulas
Further, we replace the deflections and stress functions by their expressions (27), (29) in (18), (21) and apply the Bubnov–Galerkin approach that yields the following system of the coupled second order ordinary differential equations (ODEs)
The coefficients of this system are determined in the following way
whereas the coefficient near the cubed terms is dependent on the boundary conditions type:
-
(1)
for movable plate we have
$$\begin{aligned} \gamma =\frac{E\pi ^4h^3( a^2b^2(a^4+b^4)+4\mu \pi ^2(a^6+b^6))}{16m_0a^4b^4(a^2+4\mu \pi ^2 )(b^2+4\mu \pi ^2 )}, \end{aligned}$$(34) -
(2)
for immovable plate one gets
$$\begin{aligned} \begin{aligned} \gamma&=\frac{E\pi ^4h^3( a^2b^2(a^4+b^4)+4\mu \pi ^2(a^6+b^6))}{16m_0a^4b^4(a^2+4\mu \pi ^2 )(b^2+4\mu \pi ^2 )}+\\&\quad +\frac{E\pi ^4h^3(a^4+b^4+2\nu a^2b^2)}{8a^4b^4m_0(1-\nu ^2)}. \end{aligned} \end{aligned}$$(35)Solving the system (32) is performed by the method of harmonic balance. Presenting the solution as
$$\begin{aligned} y_i=A_i \cos {\omega t}, i=1,2, \end{aligned}$$(36)where \(A_i, \omega\) are amplitude and frequency of vibrations, respectively, and expanding the equation coefficients by cosines, the following system is obtained
$$\begin{aligned} \omega ^2 A_1=\alpha A_1+\beta (A_1-A_2)+\frac{3}{4}\gamma A_1^3, \end{aligned}$$(37)$$\begin{aligned} \omega ^2 A_2=\alpha A_2+\beta (A_2-A_1)+\frac{3}{4}\gamma A_2^3. \end{aligned}$$(38)
Further, we consider two cases:
-
(1)
in-phase vibration (IPV) mode, that means \(A_1 = A_2 = A\), and nonlinear frequency is defined as follows
$$\begin{aligned} \omega _{1N}^2 =\omega _{1L}^2 +\frac{3}{4}\gamma A^2, \omega _{1L}^2 =\alpha , \omega _{1N}=\omega ; \end{aligned}$$(39) -
(2)
anti-phase vibration (APV) mode, in this case \(A_1 =-A_2 = A\), thus, from (37) and (38) the nonlinear resonant frequency is derived as
$$\begin{aligned} \omega _{2N}^2 =\omega _{2L}^2 +\frac{3}{4}\gamma A^2, \omega _{2L}^2 =\alpha +2\beta , \omega _{2N}=\omega . \end{aligned}$$(40)
It should be noted that \(\omega _{1L}, \omega _{2L}\) stand for linear frequencies of in-phase and anti-phase vibrations, respectively. Also it is shown that in case of in-phase vibrations frequency-amplitude ratio (39) does not depend on vdW interaction coefficient c and DLGSs behaves as single-layer nanoplate (Fig. 2).

Schematic diagrams of IPV (a) and APV (b) modes
5 Numerical results
In order to validate the proposed algorithm we consider several problems. Presented formulas for linear frequencies (39), (40) [regarding (33)] in both cases coincide with reported in reference [25] after small transformation. It is worthy to mention that in case of IPV mode the linear frequency of DLGSs is the same as the linear corresponding frequency of SLGS, whereas in APV mode case the frequencies are higher due to vdW interaction. We calculated the natural frequencies of the double-layer isotropic simply supported square plate with side \(a=10nm\). The thickness of each layer is \(h=0.34nm\) and material properties are taken as follows [32, 49]
The vdW interaction is governed by the following fixed parameter \(c=108\) GPa/nm. In the work [32] the nonlocal parameter is neglected (\(\mu =0\)) and authors reported the following values of linear frequencies \(\omega _{1\,L}=0.0663\;\text {THz}, \omega _{2\,L}=2.6726\;\text {THz}\). At same time presented calculation gives \(\omega _{1L}=0.0665\;\text {THz}, \omega _{2L}=2.6752\;\text {THz}\).
The next test problem is aimed at nonlinear vibrations of single-layer plate in framework classical plate theory (\(\mu =0\)). The results are obtained for Poisson’s ratio \(\nu =0.3\) and simply supported boundary conditions (immovable case). Our results are compared with those published in [51,52,53] ones, see Table 1.
As a test study case, the problem of the influence of a unidirectional magnetic field on vibrations of a single-layer graphene sheet is considered. We compared the results with ones presented in [37], where the properties of the plate are taken as follows: \(E=1.06\;\text {TPa}, \nu =0.25, \rho =2300\,\;\text {kg/m}^3, h=0.34\;\text {nm}\). The dimensionless frequency parameter \(\varOmega _{1L}=\omega _{1L}a^2 \sqrt{\frac{\rho h}{D}}\) [37] is calculated for various values of magnetic parameter MP, defined by the formula
and for nonlocal ratio \(\sqrt{\mu }/a\). These results are calculated for square nanoplate \(a/b=1\) (a) as well as nanoribbon \(a/b=10^{-5}\) (b) and presented in Fig. 3. Comparing the results one can conclude that the values of frequency parameters are very close to those obtained by Kiani [37]. We have to mention that in the publication [37] the bending moments are taken into account, but its influence is negligible [41].

Dimensionless frequency parameter \(\varOmega _{1L}\) for various values of magnetic and nonlocal parameters
The objective of the current study is focused on the analysis of the influence of the nonlocal parameter that occurred in the compatibility equation. Some researchers used the compatibility equation [see Eqs. (18), (21)] in the classical form (\(\mu =0\)). On the contrary, in this work, we considered three options for the derivation of the governing equations: the classical plate theory (CPT), the nonlocal plate theory with the classical compatibility equation (CCE) and the nonlocal compatibility equation (NCE). The numerical results are presented for DLGSs with the material properties presented in Eq. (41), the geometrical parameters \(a=10\;\text {nm}, h = 0.34 \;\text {nm}\) and interaction coefficient is \(c = 108 \;\text {GPa/nm}\). The nonlocal parameter is taken as \(\mu =2\;\text {nm}^2\) for the nonlocal elasticity theory (NCE, CCE). The nonlinear frequency ratios \(\omega _{1N}/ \omega _{1L}\) and \(\omega _{2N}/ \omega _{2L}\) are calculated for two cases of boundary conditions and presented in Fig. 4 (movable boundary conditions), Fig. 5 (immovable boundary conditions). It can be seen a difference in the results of the nonlocal theory with CCE and NCE for all considered cases. Moreover, for the simply supported immovable DLGSs, IPV mode, see Fig. 5a, the values of the nonlinear ratio \(\omega _{1N}/ \omega _{1L}\) found by the nonlocal theory are higher than the ones obtained by the classical plate theory. While for the simply supported movable plate the values of nonlinear ratio obtained by nonlocal theory with NCE are lower than the results of the classical theory, see Fig. 4a. It should be emphasized, that despite a negligible change in the nonlinear frequency ratio \(\omega _{2N}/ \omega _{2L}\) depending on the amplitude in the case of anti-phase vibration mode, the results of the nonlocal theory with NCE differ from the results of the nonlocal theory with CCE and classical plate theory (\(\mu =0\)). The values of the \(\omega _{2N}/ \omega _{2L}\) obtained by the nonlocal theory with NCE are lower than the corresponded ones by using classical plate theory as well as the nonlocal theory with CCE for movable and immovable boundary conditions.

Nonlinear frequency ratio for simply supported movable DLGSs for CPT, nonlocal theory with CCE, NCE

Nonlinear frequency ratio for simply supported immovable DLGSs for CPT, nonlocal theory with CCE, NCE
The influence of the magnetic field is investigated for a rectangular DLGSs with an aspect ratio \(b/a=2\), side size \(a=10\;\text {nm}\), and layer thickness \(h=0.34\;\text {nm}\), whereas material properties (41), and interaction parameter \(c=108\;\text {GPa/nm}\). In Table 2 one can find the values of dimensionless frequencies
for several values of nonlocal parameter \(\mu\) and magnetic parameter MP, introduced by the formula (42)
Analyzing data in Table 2, it can be noted that an increase in the magnetic parameter MP brings an increase in the values of the frequency parameters, while with an increase in the small-scale parameter \(\mu\), the values of the frequency parameters decrease. Also, it is worth noting that in the case of anti-phase vibration mode the influence of the considered magnetic field is insignificant, as well as the effect of the change in the nonlocal parameter \(\mu\). The Figs. 6 and 7 show the amplitude-frequency dependencies for various values of the magnetic parameter MP. It can be mentioned the significant influence of the magnetic field on the considering characteristics for in-phase mode, including the more pronounced one for the immovable simply supported boundary conditions. An increase in the value of the magnetic parameter contributes to a decrease in the value of the frequency ratio. In the case of anti-phase mode vibrations of DLGSs, the effect of the magnetic field is negligible.

Nonlinear frequency ratio for movable simply supported DLGSs for \(MP=0,10,20,30,40,50, \mu =2\)

Nonlinear frequency ratio for immovable simply supported DLGSs for \(MP=0,10,20,30,40,50, \mu =2\)
6 Concluding remarks
The nonlinear vibrations of double-layer graphene sheet systems are studied. The governing equations of the problem are based on the nonlocal elasticity theory, Kirchhoff hypothesis, the von Kármán equations and are presented in the mixed form with the Airy function. Two graphene sheets are bonded by van der Waals force. Considered DLGSs is subjected to an in-plane uniaxial magnetic field, and the Lorentz force is included in the governing system.
The investigation of the influence of the nonlocal parameter in the compatibility equation is performed. It is concluded that the nonlocal parameter in the compatibility equation can significantly change the results and should be taken into account in order to achieve reliable results. It is shown that for all considered cases (movable and immovable boundary conditions, in-phase and anti-phase vibration modes) the values of the nonlinear frequency ratio obtained by the nonlocal theory are lower with NCE than with CCE. If in the case of anti-phase vibration mode, due to a very small difference in results, accounting for the nonlocal parameter may be omitted, then in the case of in-phase vibration mode this parameter in the compatibility equation plays an important role. The influence of the magnetic field is significant in the case of IPV mode, with an increase in the magnetic parameter MP, the value of the linear frequency parameter increases. It should be noted the effect of MP on the nonlinear amplitude-frequency characteristics as well.
References
Bu IY, Yang CC (2012) High-performance ZnO nanoflake moisture sensor. Superlattices Microstruct 51(6):745–753. https://doi.org/10.1016/j.spmi.2012.03.009
Hoa ND, Duy NV, Hieu NV (2013) Crystalline mesoporous tungsten oxide nanoplate monoliths synthesized by directed soft template method for highly sensitive NO2 gas sensor applications. Mater Res Bull 48(2):440–448. https://doi.org/10.1016/j.materresbull.2012.10.047
Kriven WM, Kwak SY, Wallig MA, Choy JH (2004) Bio-resorbable nanoceramics for gene and drug delivery. MRS Bull 29(1):33–37. https://doi.org/10.1557/mrs2004.14
Bi L, Rao Y, Tao Q, Dong J, Su T, Liu F, Qian W (2013) Fabrication of large-scale gold nanoplate films as highly active SERS substrates for label-free DNA detection. Biosens Bioelectron 43(1):193–199. https://doi.org/10.1016/j.bios.2012.11.029
Zhong Y, Guo Q, Li S, Shi J, Liu L (2010) Heat transfer enhancement of paraffin wax using graphite foam for thermal energy storage. Solar Energy Mater Solar Cells 94(6):1011–1014. https://doi.org/10.1016/j.solmat.2010.02.004
Lin Q, Rosenberg J, Chang D, Camacho R, Eichenfield M, Vahala KJ, Painter O (2009) Coherent mixing of mechanical excitations in nano-optomechanical structures. Nat Photo 4(4):236–242. https://doi.org/10.1038/nphoton.2010.5
Balandin AA (2011) Thermal properties of graphene and nanostructured carbon materials. https://doi.org/10.1038/nmat3064
Castro Neto AH, Guinea F, Peres NM, Novoselov KS, Geim AK (2009) The electronic properties of graphene. Rev Mod Phys 81(1):109–162. https://doi.org/10.1103/RevModPhys.81.109
Lee C, Wei X, Kysar JW, Hone J (2008) Measurement of the elastic properties and intrinsic strength of monolayer graphene. Science 321(5887):385–388. https://doi.org/10.1126/science.1157996
Kasuya A, Sasaki Y, Saito Y, Tohji K, Nishina Y (1997) Evidence for size-dependent discrete dispersions in single-wall nanotubes. Phys Rev Lett 78(23):4434–4437. https://doi.org/10.1103/PhysRevLett.78.4434
Juhasz JA, Best SM, Brooks R, Kawashita M, Miyata N, Kokubo T, Nakamura T, Bonfield W (2004) Mechanical properties of glass-ceramic A-W-polyethylene composites: effect of filler content and particle size. Biomaterials 25(6):949–955. https://doi.org/10.1016/j.biomaterials.2003.07.005
Cosserat E, Cosserat F (1909) Theory of deformable bodies. A. Herman and Sons, Paris
Mindlin RD, Tiersten HF (1962) Effects of couple-stresses in linear elasticity. Arch Ration Mech Anal 11(1):415–448. https://doi.org/10.1007/BF00253946
Toupin RA (1962) Elastic materials with couple-stresses. Arch Ration Mech Anal 11(1):385–414. https://doi.org/10.1007/BF00253945
Koiter WT (1964) Couple stresses in the theory of elasticity, I and II. Proc Ned Akad Wet B 67:17–44
Eringen AC (1972) Linear theory of nonlocal elasticity and dispersion of plane waves. Int J Eng Sci 10(5):425–435. https://doi.org/10.1016/0020-7225(72)90050-X
Lam DC, Yang F, Chong AC, Wang J, Tong P (2003) Experiments and theory in strain gradient elasticity. J Mech Phys Solids 51(8):1477–1508. https://doi.org/10.1016/S0022-5096(03)00053-X
Aghababaei R, Reddy JN (2009) Nonlocal third-order shear deformation plate theory with application to bending and vibration of plates. J Sound Vib 326(1–2):277–289. https://doi.org/10.1016/j.jsv.2009.04.044
Analooei HR, Azhari M, Heidarpour A (2013) Elastic buckling and vibration analyses of orthotropic nanoplates using nonlocal continuum mechanics and spline finite strip method. Appl Math Model 37(10–11):6703–6717. https://doi.org/10.1016/j.apm.2013.01.051
Bastami M, Behjat B (2017) Ritz solution of buckling and vibration problem of nanoplates embedded in an elastic medium. Sigma J Eng Natl Sci 35(2):285–302
Singh PP, Azam MS, Ranjan V (2018) Analysis of free vibration of nano plate resting on Winkler foundation. In: Vibroengineering procedia, vol 21. JVE International, pp. 65–70. https://doi.org/10.21595/vp.2018.20406. ISSN 23450533
Sobhy M (2014) Natural frequency and buckling of orthotropic nanoplates resting on two-parameter elastic foundations with various boundary conditions. J Mech 30(5):443–453. https://doi.org/10.1017/jmech.2014.46
Mohammadi M, Goodarzi M, Ghayour M, Alivand S (2012) Small scale effect on the vibration of orthotropic plates embedded in an elastic medium and under biaxial in-plane pre-load via nonlocal elasticity theory, Technical Report 2
Pradhan SC, Phadikar JK (2009) Nonlocal elasticity theory for vibration of nanoplates. J Sound Vib 325(1–2):206–223. https://doi.org/10.1016/j.jsv.2009.03.007
Murmu T, Adhikari S (2011) Nonlocal vibration of bonded double-nanoplate-systems. Compos B Eng 42(7):1901–1911. https://doi.org/10.1016/j.compositesb.2011.06.009
Pouresmaeeli S, Ghavanloo E, Fazelzadeh SA (2013) Vibration analysis of viscoelastic orthotropic nanoplates resting on viscoelastic medium. Compos Struct 96:405–410. https://doi.org/10.1016/j.compstruct.2012.08.051
Ajri M, Seyyed Fakhrabadi MM (2018) Nonlinear free vibration of viscoelastic nanoplates based on modified couple stress theory. J Comput Appl Mech 49(1):44–53. https://doi.org/10.22059/jcamech.2018.228477.129
Ebrahimy F, Hosseini SHS (2016) Nonlinear electroelastic vibration analysis of NEMS consisting of double-viscoelastic nanoplates. Appl Phys A. https://doi.org/10.1007/S00339-016-0452-6
Mahdavi MH, Jiang L, Sun X. Nonlinear free vibration analysis of an embedded double layer graphene sheet in polymer medium. Int J Appl Mech. https://doi.org/10.1142/S1758825112500391
Ravandi AK, Karimi A, Navidbakhsh M (2014) Erratum: Numerical analysis for nonlocal nonlinear vibration of a double layer graphene sheet integrated with ZnO piezoelectric layers. J Vib Control. https://doi.org/10.1177/1077546314561036)
Jomehzadeh E, Saidi AR. A study on large amplitude vibration of multilayered graphene sheets. Comput Mater Sci. https://doi.org/10.1016/j.commatsci.2010.10.045
Mahmoudpour E, Hosseini-Hashemi SH, Faghidian SA (2019) Nonlinear resonant behaviors of embedded thick FG double layered nanoplates via nonlocal strain gradient theory. Microsyst Technol 25(3):951–964. https://doi.org/10.1007/s00542-018-4198-2
Wang Y, Li F, Jing X, Wang Y Nonlinear vibration analysis of double-layered nanoplates with different boundary conditions. Phys Lett Sect A Gen At Solid State Phys. https://doi.org/10.1016/j.physleta.2015.04.002
Wang Y, Li FM, Wang YZ (2015) Nonlinear vibration of double layered viscoelastic nanoplates based on nonlocal theory. Physica E 67:65–76. https://doi.org/10.1016/j.physe.2014.11.007
Farajpour A, Hairi Yazdi MR, Rastgoo A, Loghmani M, Mohammadi M (2016) Nonlocal nonlinear plate model for large amplitude vibration of magneto-electro-elastic nanoplates. Compos Struct 140:323–336. https://doi.org/10.1016/j.compstruct.2015.12.039
Murmu T, McCarthy MA, Adhikari S (2013) In-plane magnetic field affected transverse vibration of embedded single-layer graphene sheets using equivalent nonlocal elasticity approach. Compos Struct 96:57–63. https://doi.org/10.1016/j.compstruct.2012.09.005
Kiani K (2014) Revisiting the free transverse vibration of embedded single-layer graphene sheets acted upon by an in-plane magnetic field. J Mech Sci Technol 28(9):3511–3516. https://doi.org/10.1007/s12206-014-0811-1
Mazur O, Awrejcewicz J (2020) Ritz method in vibration analysis for embedded single-layered graphene sheets subjected to in-plane magnetic field. Symmetry 12(4):515. https://doi.org/10.3390/SYM12040515
Zhang LW, Zhang Y, Liew KM (2017) Vibration analysis of quadrilateral graphene sheets subjected to an in-plane magnetic field based on nonlocal elasticity theory. Compos B Eng 118:96–103. https://doi.org/10.1016/J.COMPOSITESB.2017.03.017
Atanasov MS, Karličić D, Kozić P (2017) Forced transverse vibrations of an elastically connected nonlocal orthotropic double-nanoplate system subjected to an in-plane magnetic field. Acta Mech 228(6):2165–2185. https://doi.org/10.1007/s00707-017-1815-6
Karličić D, Cajić M, Adhikari S, Kozić P, Murmu T (2017) Vibrating nonlocal multi-nanoplate system under inplane magnetic field. Eur J Mech A Solids 64:29–45. https://doi.org/10.1016/J.EUROMECHSOL.2017.01.013
Ghorbanpour Arani AH, Maboudi MJ, Ghorbanpour Arani MJ, Amir S (2013) 2D-Magnetic field and biaxiall in-plane pre-load effects on the vibration of double bonded orthotropic graphene sheets. J Solid Mech 5(2):193–205
Sobhy M, Radwan AF (2020) Influence of a 2D magnetic field on hygrothermal bending of sandwich CNTs-reinforced microplates with viscoelastic core embedded in a viscoelastic medium. Acta Mech 231:71–99. https://doi.org/10.1007/s00707-019-02531-7
Ghadiri M, Hosseini SHS (2019) Parametrically excited nonlinear dynamic instability of reinforced piezoelectric nanoplates. Eur Phys J Plus 134:8. https://doi.org/10.1140/EPJP/I2019-12784-9
Mazur O, Awrejcewicz J. Nonlinear vibrations of embedded nanoplates under in-plane magnetic field based on nonlocal elasticity theory. J Comput Nonlinear Dyn. https://doi.org/10.1115/1.4047390
Eringen AC (1983) On differential equations of nonlocal elasticity and solutions of screw dislocation and surface waves. J Appl Phys 54(9):4703–4710. https://doi.org/10.1063/1.332803
Volmir AS (1972) Nonlinear dynamics of plates and shells. Nauka, Moscow
Zhang LW, Zhang Y, Liew KM (2017) Modeling of nonlinear vibration of graphene sheets using a meshfree method based on nonlocal elasticity theory. Appl Math Model 49:691–704. https://doi.org/10.1016/j.apm.2017.02.053
He XQ, Kitipornchai S, Liew KM (2005) Resonance analysis of multi-layered graphene sheets used as nanoscale resonators. Nanotechnology 16(10):2086–2091. https://doi.org/10.1088/0957-4484/16/10/018
He XQ, Wang JB, Liu B, Liew KM (2012) Analysis of nonlinear forced vibration of multi-layered graphene sheets. Comput Mater Sci 61:194–199. https://doi.org/10.1016/j.commatsci.2012.03.043
Chu HN (1956) Influence of large amplitudes on free flexural vibrations of rectangular elastic plates. J Appl Mech 23:532–540
Sheikh AH, Mukhopadhyay M (1996) Large amplitude free flexural vibration of stiffened plates. AIAA J 34(11):2377–2383. https://doi.org/10.2514/3.13404
Rao SR, Sheikh AH, Mukhopadhyay M (1993) Large-amplitude finite element flexural vibration of plates/stiffened plates. J Acoust Soc Am 93(6):3250–3257. https://doi.org/10.1121/1.405710
Funding
This study was funded by the Grant OPUS 14 No. 2017/27/B/ST8/01330. Conflict of interest: Author J. Awrejcewicz has received research grant OPUS 14 from the Polish National Science Centre.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Mazur, O., Awrejcewicz, J. The nonlocal elasticity theory for geometrically nonlinear vibrations of double-layer nanoplate systems in magnetic field. Meccanica 57, 2835–2847 (2022). https://doi.org/10.1007/s11012-022-01602-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-022-01602-9