
Abstract
The effect of a delay feedback control (DFC), realized by displacement in the Duffing oscillator, for parameters which generate strange chaotic Ueda attractor is investigated in this paper. First, the classical Duffing system without time delay is analysed to find stable and especially unstable periodic orbits which can be stabilized by means of displacement delay feedback. The periodic orbits are found with help of the continuation method using the AUTO97 software. Next, the DFC is introduced with a time delay and a feedback gain parameters. The proper time delay and feedback gain are found in order to destroy the chaotic attractor and to stabilize the periodic orbit. Finally, chatter generated by time delay component is suppressed with help of an external excitation.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The first proponent of the chaos theory was Henri Poincaré, who in the 1880s, studying a three-body problem, found nonperiodic orbits which are not forever increasing nor approaching a fixed point. Since that time chaos has been observed in a number of experiments although it has not been defined. Yoshisuke Ueda on November 27, 1961 at Kyoto University was experimenting with analog computers and noticed “randomly transitional phenomena” in the specific Duffing’s oscillator. Currently scientists are looking for efficient methods to avoid that interesting, but in many cases—from technical point of view—dangerous phenomena. On the other hand, not only the Duffing but also other nonlinear systems exhibit instabilities and chaos. Therefore great attention has been paid to stabilize them. Time delay effect is one of the ideas to achieve this aim. Time delays are common feature of many physical, biological and engineering systems. There are systems where time delay is present intrinsically due to processing time, mechanical properties etc., for instance in technological cutting processes. On the other hand, there are systems where time delay is introduced externally in order to stabilize unstable periodic orbits (UPO) and unstable steady states (USS). Various methods of controlling unstable and chaotic systems have been developed in the past 20 years and applied to real systems in physics, chemistry, biology, and medicine [9]. Pyragas [24] was the first who introduced delay feedback control (DFC) to stabilize UPO embedded in a chaotic attractor. This method, known as time delay auto-synchronization (TDAS), bases on constructing the control force from the difference of the current state to the state one period in the past, so that the control signal vanishes when the stabilization of the target orbit is attained. Next, the TADS method was improved by introducing multiple delays (extended TADS or ETADS) [9].
DFC is applied usually for stabilization of the UPO [5, 7, 14, 23, 25] and also to control unstable fixed points (FP) [3, 7, 9, 14, 33]. Separate class of delay differential equations (DDE) are the neutral delay differential equations (NDDE). Its stability and asymptotic properties are described in [2, 13].
DFC method proposed by [24] works very well in case of the UPO if time delay is precisely equal to the period of the UPO and the feedback gain is strong enough. Note that only the stability properties of the orbit are changed, while the orbit itself and its period remain unaltered. If the orbit has an odd number of the real Floquet multipliers greater than unity, the delayed feedback can never stabilize it [1].
Usually in the literature DFC is applied to stabilize the Rössler system [1, 7, 14, 23] but only selected papers are devoted to the Duffing’s oscillator [8, 10, 22] which in its various forms is used to describe many nonlinear systems. The Ueda’s oscillator can be considered as a special case of the Duffing’s system which natural frequency equals to zero. Chaotic vibrations for this system exist for some set of parameters and initial conditions.
In general, dynamical systems with time delay are important class of systems, especially in the control theory, but on the other hand time delay is very often encountered in various technical systems, such as electric, pneumatic and hydraulic networks, chemical and machining processes, etc. These problems are described by DDE which indeed are a type of differential equations where time derivatives at the current moment of time depend on the solution and possibly on its derivatives at previous moments. For instance, in cutting processes the effect of time delay generates harmful vibrations—a so called regenerative chatter [6, 11, 12, 15, 26, 27, 30–32]. This one and another kind of chatter in real processes are very often investigated by means of various methods of nonlinear time series analysis [16–21, 28].
The DDE exhibit much more complicated dynamics than ordinary differential equations since a time delay could cause a stable equilibrium to become unstable and lead to chaotic motions. Therefore, this is very important from practical point of view to control chaotic systems by means of DFC method and to control the systems which are time delayed by nature, e.g. cutting processes with regenerative chatter [27, 32].
In this paper, at the beginning we consider the effect of time delay in the Ueda’s oscillator in order to stabilize the chaotic attractor by a proper selection of the DFC parameters: the time delay and the feedback gain. Next, the problem, how the chatter vibrations generated by the time delay system can be suppressed by external excitation is presented.
2 Ueda’s attractor
The classical Duffing’s oscillator is defined by the nonlinear non-autonomous equation
This model describes the dynamics of a periodically driven point mass in a single or double-well potential, depending on the parameters. The Ueda’s oscillator is a special case of Duffing’s oscillator where the natural frequency is equal to zero (ω 0 = 0). With additional assumption of δ = 0.05, λ = 1 and γ = 1 the bifurcation diagram with the external force amplitude (f) as a branching parameter shows the regions of regular and chaotic motion (Fig. 1). The chaotic regions are emphasized by the largest Lyapunov exponent (LLE) depicted by the blue line. The shaded region underneath means positive value of the LLE. For further investigation, the typical Ueda’s chaotic attractor, obtained for f = 7.5, has been chosen (Fig. 2). According to the theory of the DFC, the UPO can be stabilized, providing they exist. To find the UPO the continuation method has been applied. In this aim the AUTO97 software has been engaged [4]. The results are depicted in the bifurcation diagram (Fig. 3) where the external excitation amplitude (f) is used as the bifurcation parameter, and a stands for the vibrations’ amplitude. In the region where the chaotic Ueda’s attractor exists (f = 7.5) there are three UPOs, with periods 1, 2 and 4 T, note that: \( T = \frac{2\pi }{\lambda } \).

Bifurcation diagram of the Ueda’s oscillator for δ = 0.05, λ = 1, γ = 1 and ω 0 = 0

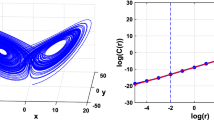
Chaotic Ueda’s attractor obtained for the parameters δ = 0.05, λ = 1, γ = 1, ω 0 = 0, f = 7.5 and the initial conditions \( x_{0} = 0,\;\dot{x}_{0} = 0 \)

Bifurcation diagram of periodic solutions of Ueda’s oscillator for δ = 0.05, λ = 1, γ = 1, ω 0 = 0
Increasing the external force amplitude (f) from zero (Fig. 3) leads to the saddle-node bifurcation occurrence. One unstable and two stable solutions exist in the range of excitation amplitude from 0.12 to 0.43, depending on initial conditions. For f = 2, the first period doubling bifurcation (PDB) appears. Simultaneously, the 1 T period solution losses its stability (dashed line) and the new solutions of period 1 and 2 T occur. The next PDBs lead to 2, 4 and 8 T period solutions, that are marked by the colour lines. Finally, the cascade of PDBs leads to chaos which cannot be observed in Fig. 3 but is visible in Fig. 1, where the positive largest Lyapunov exponent (LLE) is shaded. At the external force amplitude equal ca. 8 some of the solutions regain stability. Then, the stable periodic orbits (solid line) coexist with the UPO (dashed lines, Fig. 3).
According to the DFC theory, the Ueda’s chaotic attractor can be stabilized with the help of time delay which corresponds to the period of the selected UPO (1, 2, 4 or 8 T). The choice of time delay seems to be quite obvious, but the feedback gain should be discussed. The analysis of chaos control is presented thoroughly in the next section.
3 Chaos control
In order to control the Ueda’s chaotic attractor the time delay τ with feedback gain α is added to the original Duffing’s system (1). Thus a modified Ueda’s oscillator with the DFC is defined by the equation
For the excitation amplitude’s value f = 7.5 the chaotic attractor exists (Fig. 2) together with four UPOs of periods 1, 2, 4, and 8 T. Therefore, the feedback gain α is tested here, in case when the time delay τ equals to 1, 2, 4, and 8 T, respectively (Fig. 4). The numerical simulation of Eq. ( 2 ) is conducted in Matlab-Simulink using 4-th order Runge–Kutta procedure with variable integration step and the relative tolerance of 10−6. In order to calculate the maximal Lyapunov exponent (LLE, the blue line in Figs. 4, 5) of the system with time delay, the method of synchronization, developed by Stefanski [29] is applied.

Bifurcation diagram of Ueda’s oscillator with delay feedback control and feedback gain α as a bifurcation parameter, time delay τ is equal to 1 T (a), 2 T (b), 4 T (c), 8 T (d)

Bifurcation diagram of Ueda’s attractor with delay feedback control, time delay τ is a bifurcation parameter. The feedback gain α = 0.1
The unstable T-periodic orbit can be successfully stabilized (Fig. 4a), when the feedback gain α is greater than 0.065 and lesser than 0.13. When α > 0.13 various scenarios of motion are possible, depending on initial conditions, that is periodic of period 3 T or quasi-periodic motion. This situation lasts till α = 0.215, and next the DFC system works only partially, because a chaotic attractor exists together with a quasi-periodic motion for some initial conditions. Stabilization of 2 T period orbit with the time delay τ = 2 T looks promisingly, as well (Fig. 4b). In the region when 0.25 < α < 0.4 chaos is fully suppressed and the system response frequency is exactly equal to the external force frequency λ = 1. It has been expected, that time delay τ = 2 T results in stabilization of the orbit with period 2 T while the system response period is 1 T.
The stabilization test of the 4 T period solution leads to motion 3 T period (Fig. 4c) in spite of the fact, that stabilization of the 4 T period orbit was expected here. Comparing the bifurcation diagrams in Fig. 4a, c, one can notice that at the feedback gain α ≈ 0.15 the same 3 T period solution exists, both for the time delay τ = 1 T and τ = 4 T. When the time delay τ = 8 T there is no stabilization of any periodic orbits in the analysed range of the feedback gain α. This orbit has an odd number of the real Floquet multipliers greater than unity. This problem will be studied in the future.
On the other hand, chaos can be controlled by adjusting time delay τ. This is a second key parameter of the DFC, which influences the system dynamics. According to a typical approach to the problem only the time delay which is equal to the period of UPO is able to stabilize the orbit and avoid chaos. Therefore, now the value of the time delay τ is investigated at the feedback gain α = 0.1. In this case, the solution of period T is expected to be stable when τ = T. This is of course true but, the regular vibrations periodic or quasi-periodic) are also possible for other time delays in the places when the Largest Lyapunow Exponent LLE equals zero (see Fig. 5). However the widest region of synchronization and periodic motion appears when τ ≈ 1/3 T and τ ≈ 3 T for the analysed system. All these phenomena are illustrated in the bifurcation diagram presented in Fig. 5, where for convenience, the upper scales of the period T corresponding to time delay τ is added.
In the case of τ ≈ 1/3 T, a periodic solution also exists, even though the vibrations’ amplitude is the smallest one. This can have applicable aspects in mechanical systems which should be controlled in order to avoid chaos and large amplitudes of vibrations.
4 Chatter control
An orthogonal cutting process can be depicted as a one degree of freedom model (see Fig. 6) with an equivalent mass of the tool (it is assumed m = 1), viscoelastic properties represented by the dash-pot (δ) and a nonlinear spring of Duffing’s type. The spring force is denoted as F s (Eq. (5)). The chip thickness (h) is the difference between the current positions of the cutting tool x(t) and its position in the time instant corresponding to one revolution earlier x(t − τ) in case of turning or one flute earlier in case of milling. The time delay τ is connected with the spindle’s speed Ω. The instantaneous chip thickness h(t) is given by:
where h 0 is the initial chip’s thickness. The delay differential equation of motion is written as:
F r is the cutting force generated by the regenerative mechanism, F s is the stiffness force given by the equations:

Scheme of cutting process with regenerative mechanism
Equation (4) with substitution (5) can be converted to the form:
Equation (6) is solved numerically in Matlab-Simulink using 4-th order Runge–Kutta procedure with variable integration step and the relative tolerance of 10−6. The same numerical procedure is used in the previous section solving Eq. (2).
Investigation of Eq. (6) leads to the so called stability lobes diagram (SLD) presented in Fig. 7. The colour map shows maximal displacement (called vibrations amplitude) of the system in the plane of Ω and α, obtained for parameters: \( \omega_{0}^{2} = 2 \) , δ = 0.1, γ = 0.25 and initial conditions x(0) = 3.5, x’(0) = v 0 = 0. The red colour corresponds to the biggest amplitude. In contrast to the linear system in the considered model, vibrations depend on initial conditions (x 0, v 0). For example, the parameters of point 1 (Ω = 2.5 and α = 0.25) give the limit cycle represented by the green line or the trivial solution represented by the blue point of equilibrium in Fig. 8. The basin of attraction of these solutions is shown in Fig. 9. If the initial conditions of numerical simulations are chosen from the blue region (in Fig. 9), then we get the blue trivial solution (Fig. 8). Whereas the initial conditions are selected from the green area of Fig. 9 (big initial conditions), the green solution is an output of the analysed system. This basin of attraction is made by repeating simulations at the same parameters starting from various initial conditions (x 0, v 0).

Dependence of vibrations’ amplitude on parameters Ω and α for the initial condition x(0) = 3.5

Trivial (blue) and non-trivial (green) solutions in the phase space. (Color figure online)

Attraction basin of trivial and non-trivial solutions
According to our idea, chatter vibrations can be suppressed by introducing external excitation treated as chatter control system (CCS) with the amplitude f and the frequency λ. Then the equation of motion takes the form
Equation (7) is similar to the Eq. (2), which is has been analysed in the previous section for the sake of chaos control by delay component. Equation (7) has only modified natural frequency (ω0) by adding α. Now, chatter vibrations generated by the time delay component can be supressed by external excitation. The same excitation produces chaos in Sect. 3. The question of selection of f and λ is a key point at the moment. For the parameters corresponding to point 1 (Fig. 7, Ω = 2.5 and α = 0.25) a set of parameters (f, λ) is tested numerically (in Matlab-Simulink as mentioned above) in order to find these of them, which reduce chatter vibrations’ amplitude. The results of the simulations are presented in the map (Fig. 10), where colours correspond to the value of maximal displacement of x in the steady state. The maximal displacement of x is called vibrations’ amplitude or chatter’s amplitude, because this kind of vibrations in cutting process is known as chatter. The minimum of the vibrations’ amplitude is obtained for f = 0.35 and λ = 1.6010 (white point), which is taken to further analysis. The time series in Fig. 11 presents a response of the delay system both with activated and not activated chatter control unit. The chatter vibrations’ amplitude decreases about 10 times when CCS is on. That proves the idea works properly.

Chatter vibrations amplitude with respect to external excitction amplitude (f) and frequency (λ)

Time series for a regenerative system with activated (f = 0.35 and λ = 1.6010) and disactivated (f = 0) chatter control unit
However, CCS has a fault because it is difficult to match the external excitation (λ) and the frequency (f) in order to suppress chatter vibrations. In the analysed case the chatter frequency f c is read out from the time series when CCS is off (Fig. 11). The value of chatter frequency is 2π/3 at rotational speed Ω = 2.5 whereas, the external excitation frequency (f), which fulfil assumption of chatter suppression is about π/2 (λ = 1.6010).
However, not all initial conditions guarantee the decrease of chatter vibrations. Only relatively small initial conditions (x 0, v 0) chosen from the brown region, presented in Fig. 12 give an improvement in cutting process (see the brown time series in Fig. 11). When initial conditions are selected from the green basin the high amplitude of chatter vibrations still exist in the system (see green time series in Fig. 11). Interestingly, CCS suppresses vibrations even for big initial conditions, which lie in the right branch of the basin (Fig. 12). The basin of attraction is made classically by repeating simulations at the same parameters starting from various initial conditions (x 0, v 0). The green time series (Fig. 11) corresponds to the green basin (Fig. 12) and the brown time series (Fig. 11) refers to the initial conditions from the brown basin (Fig. 12).

Attraction basin of the green and the brown solutions with activated chatter control system. (Color figure online)
5 Conclusions
Delay feedback is one of control methods commonly used in engineering. There are although systems where time delay is present due to their natural properties and then delay is a source which generates vibrations as well. Here, DFC is applied in order to destroy chaotic attractor and to stabilize the UPO. The classical approach says, that time delay corresponding to the period of unstable orbit can stabilize it and result in the avoidance of chaotic solutions. The results presented in this paper point out other possibilities. It has been shown, that the time delay equal to 1/3 T can successfully destroy strange attractor which transforms into periodic solution. Then, the periodic orbit is more beneficial because of its smaller amplitude.
Additionally, the idea of chatter vibrations avoidance generated by the time delay effect in a manufacturing process is discussed here. It is demonstrated, that by introducing external excitation with proper frequency, amplitude and initial conditions, chatter in regenerative model of cutting can be suppressed. However, a selection of the external excitation parameters is not a simple task. This can be done numerically, as it is presented in the paper, but more general conclusions can be drawn after the analysis of periodic orbits stability.
References
Balanov A, Janson N, Scholl E (2005) Delayed feedback control of chaos: bifurcation analysis. Phys Rev E 71:16222-1–16222-9
Blyuss KB, Kyrychko YN, Hovel P, Scholl E (2008) Control of unstable steady states in neutral time-delayed systems. Eur Phys J B 65(4):571–576
Choe CU, Flunkert V, Hovel P, Benner H, Scholl E (2007) Conversion of stability in systems close to a Hopf bifurcation by time-delayed coupling. Phys Rev E 75(4):046206
Doedel E, Champneys A, Fairgrieve T, Kuznetsov Y (1998) AUTO 97: continuation and bifurcation software for ordinary differential equations (with HomCont)
Fiedler B, Flunkert V, Hovel P, Scholl E (2010) Delay stabilization of periodic orbits in coupled oscillator systems. Philos Trans R Soc A 368(1911):319–341
Fofana MS (2003) Delay dynamical system and applications to nonlinear machine tool chatter. Chaos Solitons Fractals 17:731–747
Guzenko PYu, Hovel P, Flunkert V, Scholl E, Fradkov AL (2008) Adaptive tuning of feedback gain in time-delayed feedback control. Saint Petersburg, Russia
Hamdi M, Belhaq M (2012) Control of bistability in a delayed duffing oscillator. Adv Acoust Vib 2012:1–5
Hovel P, Scholl E (2005) Control of unstable steady states by time-delayed feedback methods. Phys Rev E 72(4):046203
Hu H, Dowell EH, Virgin LN (1998) Resonances of a harmonically forced duffing oscillator with time delay state feedback. Nonlinear Dyn 15(311):327
Kecik K, Rusinek R, Warminski J (2013) Modeling of high-speed milling process with frictional effect. Proceedings of the Institution of Mechanical Engineers, Part K. J Multi-body Dyn 227(1):3–11
Kecik K, Rusinek R, Warminski J, Weremczuk A (2012) Chatter control in the milling process of composite materials. J Phys Conf Ser 382:012012
Kyrychko YN, Blyuss KB, Hovel P, Scholl E (2009) Asymptotic properties of the spectrum of neutral delay differential equations. Dyn Syst 24(3):361–372
Lehnert J, Hovel P, Flunkert V, Guzenko PYu, Fradkov AL, Scholl E (2011) Adaptive tuning of feedback gain in time-delayed feedback control. Chaos 043111:1–6
Lipski J, Litak G, Rusinek R, Szabelski K, Teter A, Warminski J, Zaleski K (2002) Surface quality of a work material’s influence on the vibrations of the cutting process. J Sound Vib 252(4):737–739
Litak G, Rusinek R (2011) Vibrations in stainless steel turning: multifractal and wavelet approaches. J VibroEng 13(1):102–108
Litak G, Rusinek R (2012) Dynamics of a stainless steel turning process by statistical and recurrence analyses. Meccanica 47(6):1517–1526
Litak G, Rusinek R, Teter A (2004) Nonlinear analysis of experimental time series of a straight turning process. Meccanica 39:105–112
Litak G, Syta A, Rusinek R (2011) Dynamical changes during composite milling: recurrence and multiscale entropy analysis. Int J Adv Manuf Technol 56(5–8):445–453
Litak G, Kecik K, Rusinek R (2013) Cutting force response in milling of Inconel: analysis by wavelet and Hilbert–Huang Transforms. Lat Am J Solids Struct. 10(1):133–140
Litak G, Polyakov YS, Timashev SF, Rusinek R (2013) Dynamics of stainless steel turning: analysis by flicker-noise spectroscopy. Physica A 392(23):6052–6063
Lu WLY (2009) Vibration control for the primary resonance of the duffing oscillator by a time delay state feedback. Int J Nonlinear Sci 8(3):324–328
Mensour B, Longtin A (1998) Chaos control in multistable delay-differential equations and their singular limit maps. Phys Rev E 58(1):410–422
Pyragas K (1992) Continuous control of chaos by self-controlling feedback. Phys Lett A 170:421–428
Pyragas K (2006) Delayed feedback control of chaos. Philos Trans R Soc A 364(1846):2309–2334
Rusinek R, Kecik K, Warminski J, Weremczuk A (2012) Dynamic model of cutting process with modulated spindle speed. AIP Conference Proceedings 1493(1):805–809
Rusinek R, Weremczuk A, Warminski J (2011) Regenerative model of cutting process with nonlinear duffing oscillator. Mech Mech Eng 15(4):129–143
Sen AK, Litak G, Syta A, Rusinek R (2012) Intermittency and multiscale dynamics in milling of fiber reinforced composites. Meccanica
Stefanski A, Dabrowski A, Kapitaniak T (2005) Evaluation of the largest Lyapunov exponent in dynamical systems with time delay. Chaos Solitons Fractals 23:1651–1659
Stepan G (2001) Modelling nonlinear regenerative effect in metal cutting. Philos Trans R Soc Lond A 1781(359):739–757
Stepan G, Szalai R, Insperger T (2004) Nonlinear dynamics of high-speed milling subjected to regenerative effect. In: Radons G, Neugebauer R (eds) Nonlinear dynamics of production systems. Wiley, New York, pp 111–127
Weremczuk A, Kecik K, Rusinek R, Warminski J (2013) The dynamics of the cutting process with duffing nonlinearity. Eksploatacja i Niezawodnosc Maintenance and Reliability 15(3):209–213
Yanchuk S, Wolfrum M, HĂ vel P, SchĂ ll E (2006) Control of unstable steady states by long delay feedback. Phys Rev E 74(2):026201-1–026201-7
Acknowledgments
The work is financially supported under the project of National Science Centre according to the decision no. DEC-2011/01/B/ST8/07504.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
About this article
Cite this article
Rusinek, R., Mitura, A. & Warminski, J. Time delay Duffing’s systems: chaos and chatter control. Meccanica 49, 1869–1877 (2014). https://doi.org/10.1007/s11012-014-9874-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-014-9874-4