
Abstract
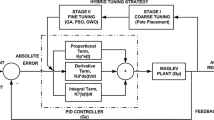
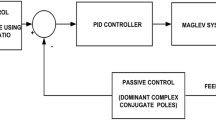
In this paper, a proportional-derivative controller is proposed to reduce the horizontal vibration of a magnetically levitated system having quadratic and cubic nonlinearities to primary and parametric excitations. A second order approximate solution is sought using the method of multiple scales perturbation technique to clarify the nonlinear behavior for both amplitude and phase of the system. The effect of feedback signal gain is studied to indicate the optimum values for best performance. Validation curves are included to compare the approximate solution and the numerical simulation. A comparison with previously published work is included.






























Similar content being viewed by others

Abbreviations
- \( y,\,{\dot{y}},\,{\ddot{y}} \) :
-
Displacement, velocity and acceleration
- \( \mu \) :
-
Linear damping coefficient
- \( \alpha_{2} ,\,\alpha_{3} \) :
-
Quadratic and cubic stiffness nonlinearity parameters
- \( f \) :
-
External excitation force amplitude
- \( \Omega \) :
-
External excitation frequency
- \( p,\,d \) :
-
Proportional and derivative gains
- \( k_{1} ,\,k_{2} ,\,k_{3} \) :
-
Constants dependent on the magnetic forces between magnets
- \( \varepsilon \) :
-
Small perturbation parameter
- \( \sigma_{1} ,\,\sigma_{2} \) :
-
Detuning parameters
References
Jo H, Yabuno H (2009) Amplitude reduction of primary resonance of nonlinear oscillator by a dynamic vibration absorber using nonlinear coupling. Nonlinear Dyn 55:67–78
Jo H, Yabuno H (2010) Amplitude reduction of parametric resonance by dynamic vibration absorber based on quadratic nonlinear coupling. J Sound Vib 329:2205–2217
Yabuno H, Kanda R, Lacarbonara W, Aoshima N (2004) Nonlinear active cancellation of the parametric resonance in a magnetically levitated body. J Dyn Syst Meas Contr 126(3):433–442
Aly M, Alberts T (2012) On levitation and lateral control of electromagnetic suspension maglev systems. J Dyn Syst Meas Control 134:061012-1
Tusset AM, Balthazar JM, Felix JLP (2013) On elimination of chaotic behavior in a non-ideal portal frame structural system, using both passive and active controls. J Vib Control 19(6):803–813
Warminski J, Bochenski M, Jarzyna W, Filipek P, Augustyniak M (2011) Active suppression of nonlinear composite beam vibrations by selected control algorithms. Commun Nonlinear Sci Numer Simulat 16:2237–2248
Shin C, Hong C, Jeong WB (2012) Active vibration control of clamped beams using positive position feedback controllers with moment pair. J Mech Sci Technol 26(3):731–740
El-Ganaini WA, Saeed NA, Eissa M (2013) Positive position feedback controller (PPF) for suppression of nonlinear sytem vibration. Nonlinear Dyn 72:517–537
Eissa M, Sayed M (2006) A comparison between active and passive vibration control of non-linear simple pendulum, Part I: transversally tuned absorber and negative \( G\dot{\varphi }^{n} \) feedback. Math Comput Appl 11(2):137–149
Eissa M, Sayed M (2006) A comparison between active and passive vibration control of non-linear simple pendulum, Part II: Longitudinal tuned absorber and negative \( G{\ddot{\varphi}} \) and \( G\varphi^{n} \) feedback. Math Comput Appl 1(2):151–162
Eissa M, Bauomy HS, Amer YA (2007) Active control of an aircraft tail subject to harmonic excitation. Acta Mech Sin 23:451–462
Eissa M, El-Ganaini WAA, Hamed YS (2005) Saturation, Stability and resonance of non-linear systems. Phys A 356:341–358
Eissa M, Sayed M (2008) Vibration reduction of a three DOF non-linear spring pendulum. Commun Nonlinear Sci Numer Simul 13:465–488
Amer YA, Bauomy HS, Sayed M (2009) Vibration suppression in a twin-tail system to parametric and external excitation. Comput Math Appl 58:1947–1964
Nayfeh AH, Mook DT (1995) Nonlinear oscillations. Wiley, New York
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
The incoming derivation of the magnetic levitation model has been mentioned before in Ref. [1]. From Fig. 31, the repulsive force in the \( \eta \) direction between the total magnetic poles on the surface \( S_{2} \) of magnet A and the total magnetic poles on the surface \( S_{3} \) of magnet B is obtained from Coulomb’s law as mentioned in [1] as follows:
where \( \delta \) denotes the gap between magnets A and B. In addition, \( \lambda_{A} ,\lambda_{B} \) and \( \mu \) respectively signify the magnetic flux densities of magnets A and B, and the magnetic permeability. The repulsive force acting between surfaces S1&S4 and the absorptive forces acting between surfaces S1&S3, and S2&S4 must be also calculated. Taking into account the thickness \( C_{A} \) and \( C_{B} \) of the magnets, the four forces for the four sets of surfaces are calculated using Eq. (40). Summing the four forces where the repulsive forces are regarded as positive and the absorptive ones are regarded as negative yields the repulsive force acting on magnets A and B with gap \( \delta \), then a nonlinear restoring force acting on the main system is derived. Here, the forces between the magnets A&A′, B&B′, A&B′, A′&B are neglected.

Repelling magnets on the main system
In Fig. 32, the magnet A is moved with an external sinusoidal excitation E. Another static Cartesian coordinate system has been considered whose O` is at the upper area of the sinusoidally moved magnet A in the initial static equilibrium state. Here, \( l \) is the constant gap between magnets A and A′ in the initial static equilibrium state. In addition, \( l_{0} \) denotes the width of a mass M including magnets B and B′. The motion of the main system is considered around \( Y_{st} \), which is the gap between magnets A and B in the initial static equilibrium state. The forces acting on magnets B and B′ are \( F(Y - E) \) and \( F(l - l_{0} - Y) \) respectively, and they are expanded with respect to \( \frac{y}{{Y_{st} }} \), where \( Y = y + Y_{st} \) and \( \left| {\frac{y}{{Y_{st} }}} \right| \ll 1 \) are assumed. By considering the Maclaurin expansion up to the third power of \( \frac{y - E}{{Y_{st} }} \) and \( \frac{y}{{Y_{st} }} \) for the forces \( F_{B} \& F_{B^{\prime}} \) respectively, the following equation of motion can be obtained by applying Newton’s second law of motion as follows:
where

Analytical model of the nonlinear magnetic levitation system. a Equilibrium state, b sinusoidally excited state
In Eq. (41), the variable y can be normalized w.r.t the value \( Y_{st} \) and the variable \( t \) can be normalized w.r.t the value \( T = \sqrt {\frac{M}{{K_{R1} + K_{L1} }}} \) as follows:
Inserting Eq. (42) into (41) yields:
where the dot indicates the derivative w.r.t the dimensionless time \( t^{*} \), and \( \mu \) denotes the main system damping coefficient due to the friction. Hereinafter in this discussion, the asterisk (*) is omitted for simplification. The dimensionless parameters in (43) are as follows:
The external excitation E is assumed as a single force as was assumed in [1]. So we can suppose the excitation as \( E = f\cos (\Omega t) \), and Eq. (43) can be as follows:
After applying the PD control signal, Eq. (44) will be as follows:
which is Eq. (1) stated at the start of this paper.
Rights and permissions
About this article

Cite this article
Eissa, M., Kandil, A., Kamel, M. et al. On controlling the response of primary and parametric resonances of a nonlinear magnetic levitation system. Meccanica 50, 233–251 (2015). https://doi.org/10.1007/s11012-014-0069-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11012-014-0069-9