
Abstract
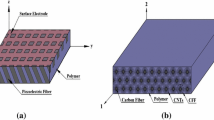
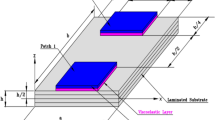
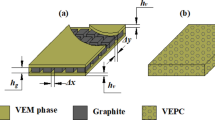
This paper deals with the analysis of active constrained layer damping (ACLD) of geometrically nonlinear vibrations of sandwich plate with orthotropic laminated composite faces separated by a flexible core. The constraining layer of the ACLD treatment is composed of the vertically/obliquely reinforced 1–3 piezoelectric composites. The Golla–Hughes–McTavish method has been implemented to model the constrained viscoelastic layer of the ACLD treatment in time domain. The first-order shear deformation theory and the Von Kármán type nonlinear strain displacement relations are used for analyzing this coupled electro-elastic problem. A three dimensional finite element model of smart laminated composite sandwich plate integrated with ACLD patches has been developed to investigate the performance of these patches for controlling the geometrically nonlinear vibrations of the plates. The numerical results indicate that the ACLD patches significantly improve the damping characteristics of the sandwich plates with laminated cross-ply and angle-ply facings for suppressing their geometrically nonlinear vibrations. Particular emphasis has been placed on investigating the effect of the variation of piezoelectric fiber orientation angle on the performance of the ACLD treatment.























Similar content being viewed by others
References
Aboudi, J.: Micromechanical prediction of the effective coefficients of thermo-piezoelectric multiphase composites. J. Intell. Mater. Syst. Struct. 9, 713–722 (1998)
Altenbach, H., Altenbach, J., Kissing, W.: Mechanics of composite structural elements. Springer, Berlin/Heidelberg (2004)
Arafa, M., Baz, A.: Dynamics of active piezoelectric damping composites. Compos. Part B 31, 255–264 (2000)
Bailey, T., Hubbard, J.E.: Distributed piezoelectric polymer active vibration control of a cantilever beam. J. Guid. Control Dyn. 8, 605–611 (1985)
Baz, A.: Active constrained layer damping. U.S. Patent 5,485,053 (1996)
Baz, A., Poh, S.: Performance of an active control system with piezoelectric actuators. J. Sound Vib. 126, 327–343 (1988)
Burlayenko, V., Sadowski, T.: Analysis of structural performance of aluminum sandwich plater with foam-filled hexagonal honeycomb core. Comput. Mater. Sci. 45, 658–662 (2009)
Dunn, M.L., Taya, M.: Micromechanics predictions of the effective electro elastic modulli of piezoelectric composites. Int. J. Solids Struct. 30, 161–175 (1993)
Ganapathi, M., Varadan, T.K., Sarma, B.S.: Nonlinear flexural vibrations of laminated orthotropic plates. Comput. Struct. 39, 685–688 (1991)
Gao, J.X., Shen, Y.P.: Active control of geometrically nonlinear transient vibration of composite plates with piezoelectric actuators. J. Sound Vib. 264, 911–928 (2003)
Ghosh, K., Batra, R.C.: Shape control of plates using piezoceramic elements. AIAA J. 33(7), 1354–1357 (1995)
Kant, T., Kommineni, J.R.: Large amplitude free vibration analysis of cross-ply composite and sandwich laminates with a refined theory and Co finite elements. Comput. Struct. 50(1), 123–134 (1994)
Khare, R.K., Garg, A.K., Kant, T.: Free vibration of sandwich laminates with two higher-order shear deformable facet shell element models. J. Sandw. Struct. Mater. 7(6), 553–554 (2005)
Lim, Y.-H., Varadan, V.V., Varadan, K.V.: Closed loop finite element modeling of active constrained layer damping in the time domain analysis. Smart Mater. Struct. 11, 89–97 (2002)
Mallik, N., Ray, M.C.: Effective coefficients of piezoelectric fiber-reinforced composites. AIAA J. 41(4), 704–710 (2003)
Mc Tavish, D.J., Hughes, P.C.: Modelling of linear viscoelastic space structures. J. Vib. Acoust. 115, 103–113 (1993)
Mallikarjuna, Kant, T.: Finite element transient response of composite and sandwich plates with a higher order theory. ASME J. Appl. Mech. 57, 1084–1086 (1990)
Margaretha, J.L., Daniel, J.I., William, R.S.: Hybrid damping models using the Golla–Hughes–McTavish method with internally balanced model reduction and output feedback. Smart Mater. Struct. 9, 362–371 (2000)
Meng, G., Ye, L., Dong, X.J., Wei, K.X.: Closed loop finite element modeling of piezoelectric smart structures. Shock Vib. 13(1), 1–12 (2006)
Moita, J.M.S., Soares, C.M.M., Soares, C.A.M.: Geometrically nonlinear analysis of composite structures with integrated piezoelectric sensors and actuators. Compos. Struct. 57, 253–261 (2002)
Nayak, A.K., Shenoi, R.A., Moy, S.S.J.: Damping prediction of composite sandwich plates using assumed strain plate bending elements based on Reddy’s higher-order theory. In: 43rdAIAA/ASME/ASCE/AHS Structures, Structural Dynamics and Materials Conference, Denver, April 2002, Paper No.1243, pp. 1–11
Nayek, A.K., Shenoi, R.A., Moy, S.S.J.: Dynamic response of composite sandwich plates subject to initial stresses. Compos. Part A 37, 1189–1205 (2006)
Noor, A.K., Burton, W.S., Bert, C.W.: Computational models for sandwich panels and shells. Appl. Mech. Rev. Trans. ASME 49(3), 155–199 (1996)
Pai, P.F., Nafeh, A.H., Oh, K., Mook, D.T.: A refined nonlinear model of composite plates with integrated piezoelectric actuators and sensors. Int. J. Solids. Struct. 30(12), 1603–1630 (1993)
Ray, M.C.: Optimal control of laminated shells with piezoelectric sensor and actuator layers. AIAA J. 41, 1151–1157 (2003)
Ray, M.C., Pradhan, A.K.: Performance of vertically reinforced 1–3 piezoelectric composites for active damping of smart structures. Smart Mater. Struct. 15(1), 631–641 (2006)
Ray, M.C., Pradhan, A.K.: On the use of vertically reinforced 1–3 piezoelectric composites for hybrid damping of laminated composite plates. Mech. Adv. Mater. Struct. 14(4), 245–261 (2007)
Ray, M.C., Shivakumar, J.: Active constrained layer damping of geometrically nonlinear transient vibrations of composite plates using piezoelectric fiber-reinforced composite. Thin Wall. Struct. 47, 178–189 (2009)
Reddy, J.N.: Geometrically nonlinear transient analysis of laminated composite plates. AIAA J. 21(4), 621–629 (1983)
Reddy, J.N.: Mechanics of laminated composite plates theory and analysis. CRC Press, Boca Raton (1997)
Reddy, J.N., Chao, W.C.: Large deflection and large amplitude free vibrations of laminated composite material plates. Comput. Struct. 13, 341–347 (1981)
Ruan, X., Chou, T.W.: A 3-D connectivity model for effective piezoelectric properties of yarn composites. J. Compos. Mater. 36(14), 1693–1708 (2002)
Sarangi, S. K., Ray, M. C.: Smart damping of geometrically nonlinear vibrations of laminated composite beams using vertically reinforced 1–3 piezoelectric composites. Smart Mater. Struct. (2010)
Sarangi, S.K., Ray, M.C.: Active damping of geometrically nonlinear vibrations of laminated composite plates using vertically reinforced 1–3 piezoelectic composites. Acta Mech. 222, 363–380 (2011)
Smith, W.A., Auld, B.A.: Modelling 1–3 composite piezoelectrics: thickness mode oscillations. IEEE Trans. Ultrason. Ferroelect. Freq. Control 31, 40–47 (1991)
Tan, P., Tong, L.: A microelectromechanics model for 3-D PFRC materials. J. Compos. Mater. 36(2), 127–141 (2002)
Xu, S.X., Koko, T.S.: Finite element analysis and design of actively controlled piezoelectric smart structures. Finite Elem. Anal. Des. 40(3), 241–262 (2004)
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
In Eq. (28), the matrices \( \left[ {{\text{Z}}_{1} } \right],\,\left[ {{\text{Z}}_{2} } \right],\,\left[ {{\text{Z}}_{3} } \right],\,\left[ {{\text{Z}}_{4} } \right],\, \left[ {{\text{Z}}_{5} } \right],\,\left[ {{\text{Z}}_{6} } \right],\,\left[ {{\text{Z}}_{7} } \right],\,\left[ {{\text{Z}}_{8} } \right],\,\left[ {{\text{Z}}_{9} } \right] \) and \( \left[ {{\text{Z}}_{10} } \right] \) are given by
where
The various submatrices \( \left[ {{\mathbf{B}}_{tbi} } \right],\,\left[ {{\mathbf{B}}_{rbi} } \right],\,\left[ {{\mathbf{B}}_{tsi} } \right] \) and \( \left[ {{\mathbf{B}}_{rsi} } \right] \) appearing in Eq. (29)
The various rigidity matrices and the rigidity vectors for electro-elastic coupling appearing in the above elemental matrices are given by
Rights and permissions
About this article
Cite this article
Kumar, R.S., Ray, M.C. Active constrained layer damping of geometrically nonlinear vibrations of smart laminated composite sandwich plates using 1–3 piezoelectric composites. Int J Mech Mater Des 8, 359–380 (2012). https://doi.org/10.1007/s10999-012-9201-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10999-012-9201-y