
Abstract
Context
The biodiversity faces an underlying threat from landscape fragmentation resulting from rapid urbanization. Examining the future trajectory of landscape fragmentation is imperative to understanding the impact of current spatial planning constraints on natural and semi-natural habitat preservation, ecosystem services, and sustainability.
Methods
We employed a Patch-generating Land Use Simulation (PLUS) model to simulate and predict the land use and landscape pattern changes in Lushan City under two distinct scenarios: “Planning Constraints (PC)” and “Natural Development (ND)”. We then identified an appropriate landscape fragmentation index (LFI) that effectively captured the fragmentation essence. To determine the optimal scale, we adopted an experimental approach using both the moving window (MW) method and the semi-variance function. By constructing a LFI spatiotemporal sequence and conducting trend analysis, we identified the potential fragmentation areas (PFA) with significant fragmentation tendencies.
Results
The spatial planning constraints will (1) prevent the encroachment of construction land into 2.14 km2 of cropland, 0.21 km2 of forest, and 0.13 km2 of grassland; (2) shift the highly fragmented area from the northeastern portion of Lushan to the planned area defined by the development boundary; (3) mitigate and decelerate the trend of landscape fragmentation in natural and semi-natural landscapes, decrease PFA by 7.74 km2 and preserve 15.61 km2 of natural landscapes. (4) still leave 29.42% of forest and 22.82% of grassland at risk of fragmentation.
Conclusions
Spatial planning constraints will effectively control the potential fragmentation in natural and semi-natural landscapes by changing the spatial distribution of LFI and PFA. This control mechanism will greatly exclude the anthropogenic impact and ensure the conservation of habitats. The habitats remaining within PFA should be focused in future eco-management optimization.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The deleterious repercussions of land use and land cover (LULC) changes associated with urbanization have been extensively documented (Hasan et al. 2020). These changes, characterized by the loss and fragmentation of natural and semi-natural landscapes with habitat patches, have emerged as a potential threat to biodiversity conservation efforts (Piano et al. 2020). The ramifications of landscape fragmentation manifest through compromised habitat connectivity (Wang et al. 2014). Its ecological repercussions extend further, with the emergence of ecological risks (Gong et al. 2015) and impediments to ecosystem services (Mitchell et al. 2015) and landscape sustainability (Wu 2021), thus exacerbating the need for comprehensive understanding and addressing fragmentation issues. Additionally, recognizing that LULC management contributes to addressing existing and future ecological risks or pressures (García-Ruiz et al. 2020; Svensson et al. 2020), numerous nations have developed spatial planning constraint policies aimed at curbing the unrestrained expansion of construction areas while alleviating disaster risks (Saarikoski et al. 2018). However, whether such policy interventions deliver benefits by influencing the future trajectory of landscape fragmentation remains uncertain. Therefore, conducting a predictive investigation into these potential influences becomes essential to inform decision-making to ensure effective landscape conservation and ecological management under urbanization pressures.
Fragmentation denotes a transformative process where larger patches undergo division into smaller, isolated patches, resulting in the transformation of the cohesive and homogeneous landscapes into a complex, heterogeneous, and discontinuous assemblage of discrete patches (Zou et al. 2022). Its historical trajectory and evolution have been detected in multiple regions (Gbanie et al. 2018; Qiu et al. 2019), predominantly revealing escalating trends in cropland fragmentation (Wei et al. 2020), greenspace partitioning (Mitchell & Devisscher 2022) and some wetland fracture (Athukorala et al. 2021) as urbanization advances. However, numerous pertinent studies fail to reach a consensus on the following two paramount challenges, and some even lack careful consideration and treatment.
First, how to effectively characterize fragmentation. To quantitatively capture the essence of fragmentation across various scales, researchers often employ filtering or combination techniques to manipulate several landscape pattern indices to avoid the bias and one-sidedness of using one single index (Shrestha et al. 2012). However, the indices’ redundancy may lead to overlapping reflections of fragmentation (Zhang et al. 2021; Zhou et al. 2022). As simultaneously explaining several indices is inefficient and lacks direct interpretation, dimensionality reduction methods such as Principal Component Analysis (PCA) (Lemoine-Rodríguez et al. 2020) or Pearson’s Correlation Test (Wei et al. 2020) are frequently employed, allowing for the construction of composite indicator characterizing multiple fragmentation features collectively. Otherwise, some novel techniques, such as the Getis statistic (Fan & Myint 2014) and Gray-Level Co-occurrence Matrices (Park & Guldmann 2020), still exhibit more limitations in a comprehensive description of landscape evolution and ecological significance as compared to landscape indices.
The second pivotal challenge revolves around the scale effect and dependency, which profoundly influence the interpretation of landscape pattern indices (Wu 2004). Due to the inherent grain size and spatial heterogeneity, selecting an appropriate scale is paramount since excessively small and large scales can yield undesirable outcomes (Chen et al. 2019; Yao et al. 2019). Therefore, the optimal scale selection represents a pivotal prerequisite for the accurate characterization of fragmentation (Ai et al. 2022). Determining the scale by the traditional Patch Matrix Model method is indeed a formidable task, exacerbated by the discontinuous distribution of numerical findings across different spatial extents (Hagen-Zanker 2016). In this regard, the Gradient Model (GM) has emerged as a recommended approach for expressing continuous spatial variables (Lausch et al. 2015). Among the representative GMs, the Moving Window (MW) approach, with its adjustable window size, enables the computation of diverse landscape indices at various scales. Besides, the integration of geostatistical modeling with MW helps with identifying the most accurate scale for calculating each landscape pattern index (He et al. 2007; Parsons et al. 2022). Additionally, the MW method yields improved spatial continuity in the results and facilitates the visualization and description of internal variations in landscape fragmentation and spatial patterns (Liu et al. 2021a).
In addition to addressing the challenges of fragmentation characterization, scholars are concerned about the impacts of spatial constraints on the landscape. The LULC, changing in time and space, fundamentally shapes the evolution of landscape patterns (Ossola et al. 2021), which provides a manipulable pathway for planning and governance to exert anthropogenic forces on the landscape. These forces, embodied in urban growth management policies (UGMPs) or more representative in spatial planning constraints (Kirby et al. 2023), are manifested through managing spatial scope and area targets, encompassing constraints on urban expansion, protection of natural habitats with connectivity (Luo et al. 2020), preservation of cropland (Penghui et al. 2020), and maximization of the landscape services (Marinelli et al. 2021). For instance, the United States has formulated more than 150 urban growth boundaries comprehensively (Avin & Bayer 2003), recognized for their contribution to sustainable landscapes (Forman 2008). Nevertheless, with common modeling, document analysis, and case study methodologies, existing studies examining the impact of planning and governance on the landscape are primarily retrospective, lacking insights into future scenarios.
Efficient spatial planning policies should be forward-looking and depend on better future benefits and sound knowledge of development scenarios. Several scholars have incorporated spatial planning constraints into LULC prediction modeling. Particularly, the Patch-generating Land Use Simulation (PLUS) model (Liang et al. 2021) has been widely applied to simulate urban expansion under various ecological constraint scenarios (Guo et al. 2022; Li et al. 2022), providing more robust support for planning decisions compared to previous models such as the CA model (Liao et al. 2019), CLUE-S model (Verburg et al. 2002), and FLUS model (Liang et al. 2018). Several scholars have focused on the potential impact that spatial or ecological constraints on the urban flood risk (Zhao et al. 2023) or carbon emission (Luo et al. 2023) based on LULC prediction. However, little research has explored the role of constraints in shaping future landscape fragmentation. Providing a representative case, the Chinese government has officially mandated a territorial spatial planning system and the scientific demarcation of the “Three Zones and Three Lines” (3Z3L) since 2019 (https://www.gov.cn/zhengce/2019-11/01/content_5447654.htm). This spatial planning constraint policy is expected to exert a substantial influence on Chinese LULC dynamics and the resulting landscape pattern evolution. Although many researchers acknowledge the policy’s significance, the 3Z3L plan has its limitations and potential for improvement (Li et al. 2019), where uncertainties persist regarding its effects on detailed ecological processes like landscape fragmentation. By integrating this policy into modeling frameworks, we can better simulate and predict the landscape trajectory with fragmentation under practical future scenarios.
Based on the preceding context, we pose the following critical scientific questions: (1) How can landscape pattern indices or metrics, applied at appropriate scales, effectively characterize the extent of landscape fragmentation? (2) How have spatial planning constraints like the 3Z3L influenced the landscape fragmentation trajectory in the future? To address these issues, our study focused on Lushan City, a county-scale region that demands an urgent examination of fragmentation due to its abundant natural and semi-natural landscapes. Our primary objective was to investigate the spatiotemporal dynamics of landscape fragmentation, forecast its future trajectory, and scrutinize the impacts of spatial planning constraints within Lushan. Innovatively, by conducting a comparative analysis under two scenarios: “Planning Constraints (PC)” and “Natural Development (ND)”, our findings shed light on how planning and governance affect landscape patterns and fragmentation trajectory. These insights can guide policymakers in the refinement of planning strategies, effectively mitigating fragmentation as a threat to habitat preservation, ecosystem services, and landscape sustainability.
Materials and methods
Study area
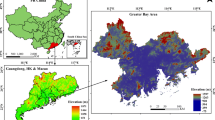
Lushan City (115°49′42′′-116°8′18′′E, 29°9′6′′-29°38′32′′N), a county-level city located within Jiujiang City in the northern region of Jiangxi Province, China, encompasses a regional area of approximately 764.54 km2 (Fig. 1). The topography exhibits a significant altitude difference, with higher elevations found in the northwest and lower elevations in the southeast. The largest freshwater lake in China, the Poyang Lake, is located east of Lushan. As of 2020, the predominant LULC types are natural or semi-natural landscapes, consisting of cropland (31.05%), forest (32.65%), and water (27.95%). The proportion of construction land was 3.72%, while the primary urban area was predominantly situated in the eastern part of the administrative jurisdiction. Given the distribution and composition of the landscape in Lushan, the city places a high priority on addressing the potential risk of fragmentation within its natural and semi-natural landscapes in the future and is heavily reliant on spatial planning constraints.

a Location and elevation map. DEM: the digital elevation model, representing altitude. b Map of LULC of Lushan in 2020. c 2020 LULC type area proportion. d Map of 3Z3L spatial constraints. e 3Z3L constraint zone area proportion
Nowadays, the environmental protection strategy, outlined in the Lushan 3Z3L phase plan, encompasses two significant areas of ecological importance: the Lushan Nature Reserve, characterized by its forest landscape, and the Poyang Lake Nature Reserve, known for its wetland ecosystem. These areas fall within the Ecological Protection Red Line (EPRL), with a total extent of 364.15 km2. The EPRL designates strict ecological protection measures to safeguard the integrity and functioning of these critical natural habitats. Furthermore, 3Z3L also assigns 77.98 km2 of land as Permanent Basic Cropland (PBC). The PBC serves as the minimum requirement for sustaining regional agricultural development and food security. In contrast to the flexibility of the Urban Development Boundary (UDB), which allows for minor adjustments, the EPRL and PBC boundaries are firmly established and non-negotiable. These demarcations reflect the commitment of Lushan to prioritize the conservation and sustainable management of its natural resources, underscoring the significance of environmental protection and the maintenance of essential cropland for the long-term well-being of its city and inhabitants.
Data source and processing
Our research process involves several stages, including data collection, variable calculation, variable integration, time series clustering, and influence factor analysis. The intricacies and interconnections of the procedure are illustrated in Fig. 2, providing a visual representation of the research workflow. We first conducted predictive simulations to anticipate changes in LULC and landscape patterns from 2025 to 2050 under PC and ND. Subsequently, we constructed a detailed LFI series from 2000 to 2050 in Lushan. Furthermore, we employed trend analysis techniques to identify areas with significant fragmentation trends as the potential fragmentation areas (PFA). Finally, we conducted a statistical and comparative analysis of the results under the two scenarios to summarize conclusions.

Technical flowchart of the methodology. LULC land use and land cover; PLUS Patch-generating Land Use Simulation; 3Z3L “Three Zones and Three Lines” Plan; Sen-slope & MK-test Theil-Sen Median trend analysis with the Mann–Kendall test
To improve the accuracy of simulation and prediction endeavors, we integrated multiple data sources, including LULC data, spatial constraints, and driver data. The LULC data originates from China’s Multi-Period Land Use Land Cover Remote Sensing Monitoring Data Set (Xu et al. 2022a). It classifies land into six primary categories: cropland, forest, grassland, water, construction land, and unutilized land (Table A1.). For data verification, we employed high-definition imageries from Google Earth (http://www.google.com/earth). The accuracy of our data categorization exceeded 85% within the study area, meeting the rigorous requirements of analysis (Liu & Wang 2018).
To account for spatial constraints and regulatory measures, we obtained regional constraint data from the Lushan Natural Resources Bureau. This dataset comprised two components: (1) precise administrative shapefile boundaries specific to Lushan, surpassing the publicly available administrative data in accuracy, and (2) shapefile data representing the 3Z3L control zones, which we further processed into integer raster data. The integer raster assigned a value of 0 to areas falling within the EPRL and PBC (land use conversion prohibited), unconstrained areas a value of 1 (regular conversion possibility), and CDB a value of 2 (higher conversion possibility).
In our study, we considered three dimensions, namely topography circumstances (Brovkina et al. 2017), climatic elements (Arficho & Thiel 2020), and human activities (Li et al. 2021; Zheng et al. 2021), as sources of variability in the landscape. From these dimensions, we selected six quantifiable drivers to incorporate into our analysis and standardized the data collection years to 2015 for all drivers, except for the digital elevation model (DEM). The year 2015 was determined to ensure consistency in simulation requirements and verifiability of simulated results. Regarding topographic conditions, we incorporated two variables derived from the DEM (Jarvis et al. 2008): elevation (ELE) and slope (SLO). Climatic elements were represented by the annual temperature average (TA) and annual precipitation average (PA) from the Annual Spatial Interpolation Dataset of Meteorological Elements in China (Xu et al. 2022b). To ensure applicability, we employed the inverse distance weighted average interpolation method to generate continuous TA and PA surfaces. Human activity-related drivers included population density (PD) and distance to road (DTR). PD was derived from a gridded population dataset obtained from WorldPop (www.worldpop.org.uk) for China. DTR was determined using road network data sourced from OpenStreetMap (www.openhistoricalmap.org), and Euclidean distance was employed for calculation. To ensure the integrity of data analysis, we conducted a variance inflation factor (VIF) covariance analysis to identify and address any data duplication or collinearity issues. The VIF values for all drivers remained below 10, indicating no significant covariance concerns and confirming the suitability of the selected drivers for subsequent model fitting and training process. Last but not least, ArcGIS Pro 2.5 was employed to acquire a spatial resolution of 30 m × 30 m for all data by using resampling or spatial interpolation techniques, and the administrative boundary of Lushan served as the mask for data extraction.
Methods
PLUS model coupled with Markov chain
The PLUS model is a hybrid approach combining Cellular Automata based on Random Seed (CARS) initialization with a rule mining framework using the Land Expansion Analysis Strategy (LEAS). The LEAS module employs a random forest algorithm, which gets configured with uniform sampling, multiple decision trees of 20, and a sampling rate of 0.01 for training with the same number of features and drivers. Using the control unique variable method, which involved deciding whether or not to enter the 3Z3L planning constraint shapefile data into the CARS module, we simulated the PC and ND scenarios. A Markov model was employed to develop probability matrices and establish the anticipated number of land types and neighborhood weight parameters for CARS, based on the 2015 and 2020 LULCs, as shown in Table A2.
After training the PLUS model, we performed a rigorous consistency test to evaluate the model’s predictive accuracy. This involved calculating the Kappa coefficient between the predicted LULC results for 2020 and the actual observed 2020 LULC data. The Kappa coefficients for the PC and ND scenarios were 0.9553 and 0.9586, respectively, indicating a high level of agreement between the predicted and observed LULC patterns. Furthermore, the overall prediction accuracy for the PC scenario was 96.80%, while for the ND scenario, it was 97.05%. Notably, the prediction accuracies for every land use category exceeded 90%, underscoring the robust predictive capabilities of the PLUS model. Moreover, our trained model had commendable performance in independent replications, maintaining a low root mean square error (RMSE) around 0.0238. This underscores the precision and robustness of our approach, offering robust validation for our methodology.
Selection and calculation of landscape pattern indices
To comprehensively characterize landscape fragmentation, we essentially employed a diverse set of landscape pattern indices at the landscape level. Indices at the landscape level are particularly well-suited for capturing spatially continuous landscape patterns (Liu et al. 2021a, b). Therefore, for the construction of the LFI, we utilized 12 landscape pattern indices representing six categories of fragmentation characteristics, each serving a distinct purpose and reflecting a positive or negative correlation with landscape fragmentation (Table 1). For the sake of comprehensiveness, we left the indices with collinearity at this stage. The collinearity would be fully addressed by subsequent PCA processing. All these landscape indices were calculated using FRAGSTATS 4.2 software, and their corresponding calculation formulas are provided in Table A3 for reference.
Moving window method and landscape scale selection
As a widely employed approach for conducting multiscale analysis, the MW technique builds upon the concept of moving average filtering (McDonnell 1981). To determine the optimal scale of the windows for indices calculation at the landscape level, we employed the geostatistical semi-variance function. Equation (1) elucidates how the semi-variance function quantifies the statistical correlation strength as a function of distance:
where: Var represents the variance; Z denotes the pixel value at a given position; and the semi-variance function value, r, is a function that depends on the locations si and sj. Initially, the function exhibits an ascending trend followed by a subsequent flattening of the function curve with scale increasing, yielding parameters such as Sill, Nugget, Partial Sill, and Range ( Vargas-Guzman et al. 2000; Burrough 2001). The magnitude of the Nugget-to-Sill ratio emerging after fitting the semi-variance function signifies the level of geographic variability and spatial autocorrelation. The Nugget-to-Sill is prone to decrease following increasing scales. The smaller its value, the more prominent the spatial autocorrelation is, and the more stable it is (Yao et al. 2019). However, the exceedingly large scales can elicit a risk of information loss (Chen et al. 2019).
In this study, for each investigated landscape pattern index, we generated and fitted semi-variance functions using circular windows of varying diameters, with intervals of 250 m. To ensure consistency, a Gaussian function was consistently employed for curve fitting for each index at different window sizes, mitigating potential discrepancies in the parameters. The Nugget-to-Sill ratio variation curves for the indices across different window scales are displayed in Fig. 3. We adopted the principle of high spatial stability and minimum information loss to determine the optimal scale. By observing the stabilization of both individual and average Nugget-to-Sill ratio of selected landscape indices at 1000 m and above (Ai et al. 2022), we can identify the optimal window scale with a diameter of 1000 m.

Nugget-to-Sill ratio curves of different landscape indices: a 6 indices including AI, CONTAG, DIVISION, ED, LPI, LSI; b 6 indices including MESH, PD, PLADJ, SHDI, SPLIT, TECI; c average curve of 12 indices. The meanings of abbreviations can be found in Table 1
Landscape fragmentation index construction
After the landscape indices selection and scale determination, we constructed the LFI using PCA. To ensure the comparability of the chosen landscape pattern indices, we initially studentized their values. Before constructing, the validity of the PCA was confirmed by subjecting the results to the Kaiser–Meyer–Olkin (KMO) measure of sampling adequacy test. As presented in Table A4, the KMO values of 0.850 ± 0.006, along with the associated significance level, indicate the suitability and applicability of the PCA approach. The first principal component, which possessed eigenvalues of 81.456% ± 1.219% (exceeding the threshold of 80%), was selected as the representative component for constructing the LFI. Consistent with common perception, we used the opposite of the first principal component as LFI to ensure its positive correlation with the degree of fragmentation. The LFI represents a linear combination of 12 indices, assigned weights as follows: AI (−0.328), CONTAG (−0.114), DIVISION (0.324), ED (0.325), LPI (−0.274), LSI (0.325), MESH (−0.324), PD (0.208), PLADJ (−0.326), SHDI (0.246), SPLIT (0.115), and TECI (0.384). Employing the ArcGIS Pro 2.5 Spatial Analyst toolkit and the Arcpy library, we successfully implemented the PCA and computed the LFI.
Trend analysis methods
The integration of the Theil-Sen Median trend analysis approach with the Mann–Kendall (MK) test proves highly effective in investigating long-term changes and identifying trends (Guo et al. 2018; Abbaszadeh et al. 2022). By this approach, we were able to assess the significance of the temporal trends observed in the spatiotemporal series of the LFI. The Sen method slope estimate is non-parametric, effective, and insensitive to measurement errors and specialized data (Michael 1984), with the formula shown in Eq. (2):
where: xi and xj are the ith and jth values in the time series, respectively, reflecting the overall rate of change during the period. To assess the significance of trends, we employed the MK test, a non-parametric and widely adopted statistical trend test method. This test does not assume a normal distribution for the observed values and is resilient to the presence of missing data and outliers (Ahani et al. 2012). The calculation formula (3) for the MK test, which uses the test statistic Z for the significance test, is as follows:
where: the S is a statistic calculated by xi and xj; Var(S) represents the estimated variance of S. The formulas (4, 5) of S and Var(S) are as follows:
where: the sgn represents the signum function; the n equals 8, representing the time points number from 2015 to 2050, consistent with the time horizon operated by the PLUS model. The applicability of statistic Z when n = 8 has been checked (Gilbert 1987; Kendall 1948; Mann 1945). The test significance p-value was computed using a bilateral test according to statistic Z, where a lower p-value indicates a higher significance. The discriminant information regarding the trend categories is presented in Table A5. To conduct the MK test, we utilized the Arcpy and pymannkendall packages in Python 3.6. Lastly, we extracted areas with significant fragmentation trends while excluding small patches and holes to obtain the PFA.
Results
Comparison of LULC projection results
The LULC of Lushan in 2000 and 2020 are illustrated in Fig. 4a and b, respectively. Over this period, the construction land area of Lushan experienced a substantial increase from 8.37 to 28.43 km2, indicating a steady development in urbanization. The primary growth directions of the construction land were in the eastern and southern regions of the former town, as well as the northeastern part of Lushan. In contrast, Fig. 5a reveals notable changes in proportion. Specifically, during the same time frame, the farmland in Lushan underwent a significant reduction of 15.57 km2. Additionally, forest and grassland areas experienced shrinkage by 2.82 and 0.94 km2, respectively. Notably, 44.11 km2 of land underwent conversion between different land types, with cropland-construction type accounting for 36.96% of the total conversion area. Cropland constituted 77.89% of the newly developed construction land (as depicted in Fig. 5b and c). These findings indicate that the urban expansion of Lushan over the past two decades has resulted in significant encroachment on semi-natural landscapes and a certain level of landscape compression or reduction.

LULC of Lushan from 2000 to 2050: a 2000; b 2020; c 2050 under the ND scenario; d 2050 under the PC scenario

Accumulation graph under different scenarios: a land use area proportion; b land use transfer area; c new construction land occupation of other landscapes. LULC land use and land cover; ND the scenario of natural development; PC the scenario of planning constraints; History historical changes from 2000 to 2020
The projected land use outcomes for the year 2050 under the ND and PC scenarios, were respectively displayed in Fig. 4c and d. The detailed spatiotemporal change process is shown in Fig. A1. In the ND scenario, the majority of the construction land patches in Lushan exhibit continued growth and expansion in the future, building upon the existing patches. Notably, while the scattered patches in the western region do not experience significant growth, substantial expansion occurs in the central, western, and northeastern patches. Conversely, under the PC scenario, the expansion of construction land exhibits a more concentrated growth pattern within a spatial range in Lushan, aligning with the planned development area designated by the UDB.
By 2050, the distribution of LULC will exhibit no significant variation between the ND and PC scenarios. Both will increase the proportion of construction land and decline the percentage of natural and semi-natural landscape areas (Fig. 5a). Under the ND scenario, a larger area of land (3.72 km2) will undergo conversion compared to the PC (as shown in Fig. 5b). The conversion from cropland to construction land will occur at the highest rate in both scenarios. Notably, a concerning imbalance has emerged in the ratio of cropland to forest over the past 20 years, with forest areas shrinking to accommodate cropland preservation. In the future, both scenarios will also raise concerns regarding the encroachment of urban growth on natural and semi-natural landscapes. The anticipated effects under the ND scenario are revealed in Fig. 5c that new construction land will encroach upon 18.58 km2 of agricultural land, 1.22 km2 of woodland, and 0.27 km2 of grassland. However, in the PC scenario, the encroachment will be reduced to 16.44 km2 of cropland, 1.01 km2 of forest, and 0.12 km2 of grassland. These findings underscore the effectiveness of the 3Z3L plan in restraining the expansion of construction land while safeguarding natural and semi-natural landscapes and their associated habitats.
Spatiotemporal variation characteristics of landscape fragmentation index
The LFI spatial distributions in 2000 and 2020 are presented in Fig. 6a and b, respectively. To facilitate visual comparison, we applied manual classification to the image colors, dividing them into equal intervals, and marking of obvious differences. During this period, the LFI values in the majority of the Lushan area range below −0.75, indicating relatively low fragmentation in most areas. Furthermore, the areas with darker colors and higher values indicate the expansion of fragmented patches (perceptible changes in the orange marking boxes), suggesting an increasing trend of landscape fragmentation in the Lushan over the past two decades. Consistent with the direction of construction land expansion, areas characterized by high fragmentation with LFI > 0.5 are predominantly located in northeastern and western regions.

LFI spatial distribution map of Lushan in different years: a 2000; b 2020; c 2050 under the ND scenario; d 2050 under the PC scenario. LFI: landscape fragmentation index; Marking boxes in orange: new high-fragmented areas from 2000 to 2020; Marking boxes in green: different high-fragmented areas under two scenarios
The projected spatiotemporal LFI dynamics of Lushan in 2050 under the ND and PC scenarios, are shown in Fig. 6c and d, respectively. The detailed spatiotemporal series are shown in Fig. A2. Under the ND scenario, the overall increasing trend of LFI and landscape fragmentation observed in Lushan is maintained. There is an augmentation in the area exhibiting LFI values increasing in the southern and southwestern regions of Lushan, with a particularly pronounced expansion of high values observed in the northeast. Under the PC scenario, the degree of landscape fragmentation in northeastern Lushan is less pronounced compared to ND. In contrast, the central and western regions of Lushan exhibit a greater degree of landscape fragmentation (perceptible changes in the green marking boxes), aligning with the designated development area of the UDB.
3Z3L influences the future spatial patterns of landscape fragmentation. We tallied the average LFI values across several landscape types for cross-sectional comparison (Table A6.). The overall average LFI of Lushan increases within the range of −0.975 to −0.784. By 2050, the different landscape categories in the region will experience varying degrees of fragmentation: water < forest < cropland < grassland < construction land < unutilized land. In terms of future trends, the LFI values from 2025 to 2050 will exhibit no significant differences between the two scenarios (p = 0.546 > 0.05, N = 12), as illustrated in Fig. 7a. This finding suggests that the 3Z3L plan may be ineffective in curbing the overall fragmentation trend of Lushan. The variations in LFI between natural and semi-natural landscapes under the two scenarios are depicted in Fig. 7b, c, and d. Notably, landscape fragmentation is significantly lower under the PC scenario compared to the ND scenario for grasslands (p = 0.0068 < 0.05, N = 12), forests (p = 0.0010 < 0.05), and croplands (p = 0.0390 < 0.05, N = 12). These findings underscore the effectiveness of the 3Z3L plan in reducing and mitigating the fragmentation of natural and semi-natural landscapes.

LFI time series line chart under two scenarios in different landscapes: a on Lushan overall average; b in cropland landscape; c in forest landscape; d in grassland landscape. LFI landscape fragmentation index; ND the scenario of natural development; PC the scenario of planning constraints; History historical changes from 2000–2020
Statistical analysis of potential fragmentation areas
The spatial representations of the LFI trends under the two scenarios are shown in Fig. 8a, b, and c, with 46 to 47% of Lushan demonstrating “No obvious change”. These areas are primarily concentrated in the eastern and southern water bodies, the northwestern forest region, and some southern parts. Besides, only small part of locations demonstrates an LFI decline, representing a decreasing trend of landscape fragmentation. Of particular interest is the distribution and percentage of areas experiencing a significant increase in LFI, accounting for approximately 30–31% of the locations. These areas serve as the PFA in our study (Fig. 8d and e). The PFA under the PC scenario is smaller than that under the ND scenario, with the reduced patches primarily located in northern Lushan. The total PFA is estimated to be 240.18 km2 under the ND scenario and 232.44 km2 under the PC scenario, as depicted in Fig. 8f.

a Accumulation diagram of LFI trend under two scenarios; b LFI trend spatial distribution diagram under ND scenario; c LFI trend spatial distribution diagram under PC scenario; d PFA and its internal landscape type under ND scenario; e PFA and its internal landscape type under PC scenario; f landscape type area within PFA under two scenarios
Concurrently, the implementation of the 3Z3L plan brings about modifications in the PFA spatial distribution, leading to mitigation of fragmentation in some landscapes. Under the ND scenario, the PFA encompasses 112.44 km2 of cropland, 82.03 km2 of forest, 16.49 km2 of grassland, and 10.13 km2 of water. In comparison, the PC scenario yields marginal increments in the area of cropland (+ 1.79 km2) and water (+ 1.98 km2) within the PFA, while experiencing substantial decreases in the areas of grassland (−9.00 km2) and forest (−8.59 km2). To explain further, under the PC scenario, there is 1.79 km2 of semi-natural landscapes becoming part of the PFA while safeguarding 15.61 km2 of the natural landscape from being identified as PFA. Despite the effectiveness of the 3Z3L plan in imposing spatial constraints, we discerned that there is still a significant trend of landscape fragmentation affecting 48.11% of cropland, 29.42% of forests, and 22.82% of grassland in Lushan. Consequently, more concerted efforts should be directed toward preventing habitat fragmentation within these natural and semi-natural landscape areas.
Discussion
Mitigating effect of spatial planning constraints on fragmentation
One of the pivotal findings of our study is that the 3Z3L plan will relatively mitigate the fragmentation risk of the natural landscapes over the next 3 decades. Our results align with previous research (Crossman et al. 2007; Dorning et al. 2015), confirming the effectiveness of the spatial plan constraints in preventing the fragmentation of forests particularly, and facilitating the conservation and restoration of ecosystems within the region. These findings hold significant implications for biodiversity conservation and ecological security in Lushan, which is endowed with valuable natural landscape resources. The impact of the 3Z3L plan on the fragmentation of semi-natural cropland landscapes is more nuanced. For one thing, it slightly expands the distribution area of cropland within the PFA; for another, it mitigates the loss of cropland and slows down the overall fragmentation trend of cropland. This relationship between landscape fragmentation and cropland consumption is consistent with other study findings (Pili et al. 2019).
Our findings demonstrate that landscape spatial planning constraints will exert an influence on future landscape patterns and fragmentation trajectory, but detailed ecological implications from these changes are complex for different landscape types. In this study, we can generally speculate that the fragmentation mitigation of natural and semi-natural landscapes will positively affect the ecosystem services supply and flow and contribute to regional landscape sustainability. However, the concrete impacts within a specific type of landscape stay uncertain. Despite these complexities, the PFA serves as a valuable reminder during policy implementation, highlighting the importance of considering landscape fragmentation in planning and management strategies. PFA reveals that part of natural and semi-natural landscapes remains with a significant fragmentation trend. The government must enforce the protection of these habitats by strictly implementing the red line policy, developing targeted ecological management programs, and reducing potential threats from nearby towns.
Model application considerations
In this study, our primary approach centered on the application of the PLUS model, a foundational tool for predicting landscape patterns and fragmentation dynamics. This endeavor involved a meticulous sequence of procedures within the LEAS and CARS components, utilizing both the tuning reference and training datasets. Within the LEAS module, we assessed the contributions of six drivers to the LULC change. The relative significances of these drivers, as determined from their respective weights, are elucidated as follows: DTR (0.262), PD (0.213), ELE (0.229), SLO (0.036), PA (0.134), and TA (0.056). These findings underscore the predominant influence exerted by factors associated with human activities on the transformative dynamics of landscape patterns, while elevation emerges as a pivotal natural driver. Notably, within this gamut of factors, emerges as the foremost contributor, a consequence inevitably entwined with the extensive construction and transformation activities occurring along road networks. The established link between linear infrastructures like roads and landscape connectivity decline and fragmentation underscores the necessity for prioritizing their layout in future urban planning endeavors (Huang et al. 2022). In the broader landscape research domain, previous scholars have deliberated on the integration of supplementary factors into their models, encompassing variables such as regional gross domestic product, soil texture, and distance to water (Huiran et al. 2015; Li et al. 2016). Nevertheless, researchers must exercise judicious discretion when contemplating the inclusion of additional drivers, considering both the potential enhancement of model accuracy and the risk of encountering issues related to duplicated variables, which, if left unchecked, may culminate in model overfitting.
By incorporating the 3Z3L plan into our model within the CARS module and leveraging the “conversion constraint” function, we were able to meticulously forecast and compare LULC changes under both the ND and PC conditions. Previous studies have explored different methods for identifying conversion constraints, such as the utilization of remote sensing ecological indices for the identification of areas boasting high ecological quality (Li et al. 2022), or the delineation of varying levels of ecological security patterns as spatial eco-constraints (Guo et al. 2022). In our study, we focused on the control of spatial planning constraints as a solitary variable, meticulously aligning these spatial eco-constraints stipulated by the developed plan, ensuring their pragmatic relevance and congruence with real-world conditions. The entire no-conversion zone encompassed both EPRL and PBC areas, assuming the strict enforcement of the 3Z3L plan. However, several dimensions warrant further investigation. These encompass the assessment of the degree to which zoning management policies are stringently enforced, the examination of the efficacy of protected areas in forestalling encroachments, the simulation of plausible scenarios involving activities like indiscriminate logging or illicit construction owing to lax oversight, the evaluation of the ensuing environmental repercussions, and the formulation of viable solutions to address emergent challenges of this nature.
About scale and implications of landscape pattern indices
In the quest to determine the optimal scale for our study, we delved into the geostatistics of the 12 landscape pattern indices, employing a semi-variance function. Our analysis reveals that a diameter size of 1000 m stood as the most suitable scale for this investigation. In addition, we find that the Nugget-to-Sill ratio curve shape and optimal scale findings may exhibit variability across different studies (Li et al. 2014; Wu et al. 2020). The difference can be attributed to several factors, including the inherent characteristics of the landscape pattern indices themselves, the spatial resolution of LULC data, and potential errors during LULC data interpretation. Therefore, when scrutinizing landscape patterns, researchers should exercise judiciousness in selecting appropriate scales based on the specific fitting characteristics of each index, particularly when employing the MW method. In this way, landscape indices are ensured to effectively capture the pertinent spatial patterns and furnish precise insights into the landscape dynamics.
The weight vector of the LFI reveals the correlations of individual landscape indices with the landscape fragmentation degree. AI, CONTAG, LPI, MESH, and PLADJ exhibit a negative correlation, while DIVISION, ED, LSI, PD, SHDI, SPLIT, and TECI show a positive correlation. These findings are congruent with outcomes reported in prior studies (Liu et al. 2021a, b; Wang et al. 2022a, b). Noteworthy is the consideration of the temporal instability witnessed in the landscape indices curve, as elucidated in Fig. A3. After confirmation of the stability and accuracy of the simulation model, we are convinced that this temporal instability arises from the intricate nature of patch shape and distribution, serving as an objective reflection of LULC changes transpiring across different years. Similar instability phenomena have been found in other studies (Gbanie et al. 2018; Jiao et al. 2019).
The LFI effectively amalgamates fragmentation characteristics emanating from diverse facets of landscape patches. It plays a crucial role in bias reduction and neutralizing instability inherent in landscape indices. Consequently, it emerges as a robust weighted metric, demonstrating resilience against significant fluctuations induced by abrupt shifts in a single index (Langford et al. 2006). However, we acknowledge that the LFI might not possess the sensitivity to discern subtle differences in some characteristics of fragmentation. By comparison of Figs. 7a and A3, some individual indices composing the LFI, such as CONTAG and PD, notably demonstrate subtle but real distinctions between two scenarios, which are imperceptible to the LFI. Thus, while the LFI furnishes comprehensive spatiotemporal insights into fragmentation patterns, it can only serve as a reference point. Future research endeavors should delve deeper into distinct LFI and develop novel methodologies for more intricate and nuanced landscape fragmentation analysis and interpretation.
Furthermore, we also emphasize that certain landscape indices, such as AI, PD, and PLADJ, undergo more significant changes after 2020 than in the preceding years (as shown in Fig. A3). We posit that this phenomenon is attributable to systematic noise stemming from the simulation mechanism of the PLUS model. Our observations unveiled the emergence of some edge minor irregularities or serrations during the conversing process, arising from the neighborhood effects employed in the PLUS model. Some sensitive indices captured these changes while others failed. However, it is paramount to underscore that this noise did not exert much impact on our findings and conclusions. This is attributed to the fact that, first, the constructed LFI constructed by PCA avoided the accumulation of noise effects. Because the PCA method has an image-denoising capability that removes most of the effects of noise at an overall level (Paul et al. 2023). Second, with the robust LFI and applicable non-parametric trend test, our analysis under two scenarios is comparable. The LFI and trend values for analysis are insensitive to noise and keep tenable comparison conclusions.
Limitations and future perspective
This study acknowledges several limitations deserving of consideration. Firstly, investigating the reasons for landscape fragmentation remains constrained due to the lack of exploration into landscape pattern indices at patch and class levels. This limitation impedes a more profound understanding of the underlying causes of landscape fragmentation. To overcome this, future research endeavors should expand the repertoire of landscape pattern indices considered, encompassing various scales and landscape analysis levels to unravel the complex drivers of fragmentation.
Secondly, while we introduced the LFI as a descriptor of the fragmentation level, we did not conduct a comprehensive comparison with alternative methodologies for landscape fragmentation analysis. A thorough comparative assessment would provide insights into the relative strengths and weaknesses of our approach. Future studies should prioritize such comparisons to enhance the robustness and validity of fragmentation assessments. Furthermore, the development of a more rational and scientific method for characterizing and analyzing landscape fragmentation is essential. This entails the establishment of unified judgment criteria or thresholds that can guide researchers and policymakers in assessing the severity of fragmentation accurately.
Thirdly, the spatial resolution of our data remains a limitation, particularly when examining detailed planned projects such as roads, highways, pipelines, and other linear infrastructures. While it is recognized and valuable to conduct relatively macro-view fragmentation studies (Justeau Allaire et al. 2021; Bowler et al. 2022), some specific or local impacts may be obscured at our current resolution. Similarly, researchers often face a trade-off between spatial resolution and temporal coverage when working with LULC or remote sensing data. To address this challenge in future research, technological advancements like image fusion and deep learning could be leveraged to create datasets that offer the advantages of both high spatial resolution and long-term coverage. This advancement would empower researchers to simulate and explore the impacts of detailed planning elements with unprecedented precision, shedding light on their effects on landscape fragmentation dynamics.
In conclusion, while this study has contributed valuable insights into landscape fragmentation, these acknowledged limitations underscore the need for continued research and innovation in the field. Addressing these constraints will pave the way for a more comprehensive and precise understanding of the landscape fragmentation process, ultimately guiding effective landscape management and conservation efforts.
Conclusion
The primary instrument used in this study was the PLUS model, enabling the simulation and forecasting of LULC and landscape pattern changes of Lushan under the ND and PC scenarios. By constructing a spatiotemporal LFI series and conducting trend analysis, we identified areas exhibiting significant landscape fragmentation trends. Through thoroughly analyzing the PFA and 3Z3L plan influence on landscape fragmentation, we arrived at the following salient findings:
-
1)
Over the last two decades, Lushan has undergone rapid urbanization, leading to substantial encroachments on semi-natural landscapes and the compression of its natural landscapes. This period has seen a discernible fragmentation trend, accentuating the urgency of addressing this issue.
-
2)
Urban expansion and landscape fragmentation will persist by 2050. However, the implementation of the 3Z3L plan will promise alleviation of construction land expansion when compared to the ND scenario. Spatial planning constraints will provide significant protection for more natural and semi-natural landscapes and associated habitats from encroachment by new urban development.
-
3)
While the 3Z3L plan will have a limited impact on the overall level of landscape fragmentation in Lushan, it will exert a significant influence on the spatial distribution of LFI. This spatial reconfiguration will lead to the overall mitigation of fragmentation trends across natural and semi-natural landscapes and the reduction of PFA, effectively preventing some natural landscapes from being degraded into PFA.
-
4)
Following the implementation of the 3Z3L plan, certain natural habitats will remain within the PFA, facing high fragmentation risk. Prioritizing the protection of these vulnerable patches and associated habitats is imperative, necessitating to focus on optimization and adjustment of the 3Z3L plan and eco-management measures.
In summary, this case study presents a spatiotemporal perspective on fragmentation trajectory research. It contributes to understanding how planning and governance influence landscape configurations and fragmentation dynamics. Moreover, it provides an opportunity to incorporate landscape fragmentation risk into eco-management optimization and landscape sustainability. Policymakers can leverage this knowledge to optimize and adjust the existing range of spatial constraints, focusing on habitats within PFA to develop targeted protection and management measures for high fragmentation areas.
Data availability
The datasets generated and analyzed during the current study are available from the corresponding author upon reasonable request.
References
Abbaszadeh TN, Mohd SHZ, Salehi S, Chanussot J, Janalipour M (2022) Remotely-sensed ecosystem health assessment (RSEHA) model for assessing the changes of ecosystem health of Lake Urmia Basin. Int J Image Data Fusion 13(2):180–205
Ahani H, Kherad M, Kousari MR, Rezaeian-Zadeh M, Karampour MA, Ejraee, F.,... Kamali, S. (2012) An investigation of trends in precipitation volume for the last three decades in different regions of Fars province. Iran Theor Appl Climatol 109(3–4):361–382
Ai J, Yu K, Zeng Z, Yang L, Liu, Y.,... Liu, J. (2022) Assessing the dynamic landscape ecological risk and its driving forces in an island city based on optimal spatial scales: Haitan Island. China Ecol Indic 137:108771
Arficho M, Thiel A (2020) Does land-use policy moderate impacts of climate anomalies on LULC change in dry-lands? An empirical enquiry into drivers and moderators of LULC change in Southern Ethiopia. Sustainability (Basel, Switzerland) 12(15):6261
Athukorala D, Estoque RC, Murayama Y, Matsushita B (2021) Impacts of urbanization on the Muthurajawela Marsh and Negombo Lagoon, Sri Lanka: implications for landscape planning towards a sustainable urban wetland ecosystem. Remote Sens 13(2):316
Aunap R, Uuemaa E, Roosaare J, Mander U, Martin-Duque JF, Brebbia C, A.,... Mander, U. (2006) Spatial correlograms and landscape metrics as indicators of land use changes. Geo-Environ Landsc Evol II 89:305–315
Avin U, Bayer M (2003) Right-sizing urban growth boundaries (69, pp 22). Chicago: American Planning Association (Reprinted)
Bowler E, Lefebvre V, Pfeifer M, Ewers RM (2022) Optimising sampling designs for habitat fragmentation studies. Methods Ecol Evol 13(1):217–229
Brovkina O, Zemek F, Novotný J, Heřman M, Štěpánek P (2017) Analysing changes in land cover in relation to environmental factors in the districts of Znojmo and Třebíč (Czech Republic). Eur J Environ Sci 7(2):108–118
Burrough PA (2001) GIS and geostatistics: essential partners for spatial analysis. Environ Ecol Stat 8(4):361–377
Chen L, Gao Y, Zhu D, Yuan Y, Liu, Y.,... Shah, T. I. (2019) Quantifying the scale effect in geospatial big data using semi-variograms. PLoS ONE 14(11):e225139
Crossman ND, Bryan BA, Ostendorf B, Collins S (2007) Systematic landscape restoration in the rural-urban fringe: meeting conservation planning and policy goals. Biodivers Conserv 16(13):3781–3802
Dorning MA, Koch J, Shoemaker DA, Meentemeyer RK (2015) Simulating urbanization scenarios reveals tradeoffs between conservation planning strategies. Landsc Urban Plan 136:28–39
Echeverria C, Gatica P, Fuentes R (2013) Habitat edge contrast as an indicator to prioritize sites for ecological restoration at the landscape scale. Nat Conserv 11(2):170–175
Fan C, Myint S (2014) A comparison of spatial autocorrelation indices and landscape metrics in measuring urban landscape fragmentation. Landsc Urban Plan 121:117–128
Forman. (2008) Urban regions. Cambridge University Press, Cambridge
García-Ruiz JM, Lasanta T, Nadal-Romero E, Lana-Renault N, Álvarez-Farizo B (2020) Rewilding and restoring cultural landscapes in Mediterranean mountains: opportunities and challenges. Land Use Policy 99:104850
Gbanie S, Griffin A, Thornton A (2018) Impacts on the urban environment: land cover change trajectories and landscape fragmentation in post-war Western Area, Sierra Leone. Remote Sens (Basel, Switzerland) 10(1):129
Gilbert. (1987) Statistical methods for environmental pollution monitoring. Van Nostrand Reinhold Co, New York
Gong J, Yang J, Tang W (2015) Spatially explicit landscape-level ecological risks induced by land use and land cover change in a national ecologically representative region in China. Int J Environ Res Public Health 12(11):14192–14215
Guo M, Li J, He H, Xu J, Jin Y (2018) Detecting global vegetation changes using Mann-Kendal (MK) trend test for 1982–2015 time period. Chin Geogra Sci 28(6):907–919
Guo R, Wu T, Wu X, Luigi S, Wang Y (2022) Simulation of urban land expansion under ecological constraints in Harbin-Changchun urban agglomeration. China Chin Geogr Sci 32(3):438–455
Hagen-Zanker A (2016) A computational framework for generalized moving windows and its application to landscape pattern analysis. Int J Appl Earth Obs Geoinf 44:205–216
Hasan SS, Zhen L, Miah MG, Ahamed T, Samie A (2020) Impact of land use change on ecosystem services: a review. Environ Dev 34:100527
He Z, Zhao W, Chang X (2007) The modifiable areal unit problem of spatial heterogeneity of plant community in the transitional zone between oasis and desert using semivariance analysis. Landsc Ecol 22(1):95–104
Huang D, Zhu S, Liu T (2022) Are there differences in the forces driving the conversion of different non-urban lands into urban use? A case study of Beijing. Environ Sci Pollut Res Int 29(5):6414–6432
Huiran H, Chengfeng Y, Jinping S (2015) Scenario simulation and the prediction of land use and land cover change in Beijing, China. Sustainability 7(4):4260–4279
Jarvis A, Reuter HI, Nelson A, Guevara E (2008) Hole-filled SRTM for the globe version 4, available from the CGIAR-CSI SRTM 90m database: https://srtm.csi.cgiar.org
Jiao M, Hu M, Xia B (2019) Spatiotemporal dynamic simulation of land-use and landscape-pattern in the Pearl River Delta, China. Sustain Cities Soc 49:101581
Justeau Allaire D, Vieilledent G, Rinck N, Vismara P, Lorca X, Birnbaum, P.,... Carvahlo, S. (2021) Constrained optimization of landscape indices in conservation planning to support ecological restoration in New Caledonia. J Appl Ecol 58(4):744–754
Kendall MG (1948) Rank correlation methods. Griffin, Oxford
Kirby MG, Scott AJ, Luger J, Walsh CL (2023) Beyond growth management: a review of the wider functions and effects of urban growth management policies. Landsc Urban Plan 230:104635
Langford WT, Gergel SE, Dietterich TG, Cohen W (2006) Map misclassification can cause large errors in landscape pattern indices: examples from habitat fragmentation. Ecosystems (NY) 9(3):474–488
Lausch A, Blaschke T, Haase D, Herzog F, Syrbe R, Tischendorf, L.,... Walz, U. (2015) Understanding and quantifying landscape structure: a review on relevant process characteristics, data models and landscape metrics. Ecol Model 295:31–41
Lemoine-Rodríguez R, Inostroza L, Zepp H (2020) The global homogenization of urban form. An assessment of 194 cities across time. Landsc Urban Plan 204:103949
Li D, Ding S, Liang G, Zhao Q, Tang, Q.,... Kong, L. (2014) Landscape heterogeneity of mountainous and hilly area in the western Henan Province based on moving window method. Acta Ecol Sin 34(12):3414–3424
Li X, Wang Y, Li J, Lei B (2016) Physical and socioeconomic driving forces of land-use and land-cover changes: a case study of Wuhan City, China. Discret Dyn Nat Soc 2016:1–11
Li H, Peng J, Yanxu L, Yi Na H (2017) Urbanization impact on landscape patterns in Beijing City, China: a spatial heterogeneity perspective. Ecol Ind 82:50–60
Li M, Wang C, Zhang X (2019) Identification of the candidate areas of ecological protection red lines based on water conservation function in territory spatial planning. Geogr Res 38(10):2447–2457
Li C, Yang M, Li Z, Wang B (2021) How will Rwandan land use/land cover change under high population pressure and changing climate? Appl Sci 11(12):5376
Li J, Gong J, Guldmann JM, Yang J, Zhang Z (2022) Simulation of land-use spatiotemporal changes under ecological quality constraints: the case of the Wuhan urban agglomeration area, China, over 2020–2030. Int J Environ Res Public Health. https://doi.org/10.3390/ijerph19106095
Liang X, Liu X, Li X, Chen Y, Tian H, Yao Y (2018) Delineating multi-scenario urban growth boundaries with a CA-based FLUS model and morphological method. Landsc Urban Plan 177:47–63
Liang X, Guan Q, Clarke KC, Liu S, Wang B, Yao Y (2021) Understanding the drivers of sustainable land expansion using a patch-generating land use simulation (PLUS) model: a case study in Wuhan, China. Comput Environ Urban Syst 85:101569
Liao J, Shao G, Wang C, Tang L, Huang Q, Qiu Q (2019) Urban sprawl scenario simulations based on cellular automata and ordered weighted averaging ecological constraints. Ecol Ind 107:105572
Lin Y, An W, Gan M, Shahtahmassebi A, Ye Z, Huang L, Wang K (2021) Spatial grain effects of urban green space cover maps on assessing habitat fragmentation and connectivity. Land (Basel) 10(10):1065
Liu C, Wang C (2018) Spatio-temporal evolution characteristics of habitat quality in the Loess Hilly region based on land use change: a case study in Yuzhong county. Acta Ecol Sin 38(20):7300–7311
Liu C, Zhang F, Carl Johnson V, Duan P, Kung H (2021a) Spatio-temporal variation of oasis landscape pattern in arid area: human or natural driving? Ecol Ind 125:107495
Liu F, Wang W, Wang J, Zhang X, Ren J, Liu Y (2021b) Multi-scale analysis of the characteristics of the changing landscape of the typical mountainous region of Southwest China over the past 40 years. PeerJ 9:e10923
Llausas A, Nogue J (2012) Indicators of landscape fragmentation: the case for combining ecological indices and the perceptive approach. Ecol Ind 15(1):85–91
Luo Y, Wu J, Wang X, Wang Z, Zhao Y (2020) Can policy maintain habitat connectivity under landscape fragmentation? A case study of Shenzhen, China. Sci Total Environ 715:136829
Luo H, Li Y, Gao X, Meng X, Yang, X.,... Yan, J. (2023) Carbon emission prediction model of prefecture-level administrative region: a land-use-based case study of Xi’an city, China. Appl Energy 348:121488
Mann HB (1945) Nonparametric tests against trend. Econometrica 13(3):245–259
Marinelli MV, Valente D, Scavuzzo CM, Petrosillo I (2021) Landscape service flow dynamics in the metropolitan area of Córdoba (Argentina). J Environ Manage 280:111714
McDonnell MJ (1981) Box-filtering techniques. Comput Gr Image Process 17(1):65–70
Michael S (1984) Understanding robust and exploratory data analysis. J R Stat Soc. https://doi.org/10.2307/2988240
Mitchell MGE, Devisscher T (2022) Strong relationships between urbanization, landscape structure, and ecosystem service multifunctionality in urban forest fragments. Landsc Urban Plan 228:104548
Mitchell MGE, Bennett EM, Gonzalez A (2015) Strong and nonlinear effects of fragmentation on ecosystem service provision at multiple scales. Environ Res Lett 10(9):94014
Nasehi S, Imanpour Namin A (2020) Assessment of urban green space fragmentation using landscape metrics (case study: district 2, Tehran city). Model Earth Syst Environ 6(4):2405–2414
Ossola A, Cadenasso ML, Meineke EK (2021) Valuing the role of time in urban ecology. Front Ecol Evol. https://doi.org/10.3389/fevo.2021.620620
Park Y, Guldmann J (2020) Measuring continuous landscape patterns with gray-level co-occurrence matrix (GLCM) indices: an alternative to patch metrics? Ecol Ind 109:105802
Parsons IL, Boudreau MR, Karisch BB, Stone AE, Norman DA, Webb S, L, Street GM (2022) Aiming for the optimum: examining complex relationships among sampling regime, sampling density and landscape complexity to accurately model resource availability. Landsc Ecol 37(11):2743–2756
Paul D, Chakraborty S, Das S (2023) Robust principal component analysis: a median of means approach. IEEE Trans Neural Netw Learn Syst. https://doi.org/10.1109/TNNLS.2023.3298011
Penghui J, Manchun L, Liang C (2020) Dynamic response of agricultural productivity to landscape structure changes and its policy implications of Chinese farmland conservation. Resour Conserv Recycl 156:104724
Piano E, Souffreau C, Merckx T, Baardsen LF, Backeljau T, Bonte, D.,... Hendrickx, F. (2020) Urbanization drives cross-taxon declines in abundance and diversity at multiple spatial scales. Glob Change Biol 26(3):1196–1211
Pili S, Serra P, Salvati L (2019) Landscape and the city: Agro-forest systems, land fragmentation and the ecological network in Rome, Italy. Urban For Urban Green 41:230–237
Qiu L, Pan Y, Zhu J, Amable GS, Xu B (2019) Integrated analysis of urbanization-triggered land use change trajectory and implications for ecological land management: a case study in Fuyang, China. Sci Total Environ 660:209–217
Saarikoski H, Primmer E, Saarela S, Antunes P, Aszalós R, Baró F, Young J (2018) Institutional challenges in putting ecosystem service knowledge in practice. Ecosyst Serv 29:579–598
Shrestha MK, York AM, Boone CG, Zhang S (2012) Land fragmentation due to rapid urbanization in the Phoenix Metropolitan area: analyzing the spatiotemporal patterns and drivers. Appl Geogr (Sevenoaks) 32(2):522–531
Svensson J, Neumann W, Bjärstig T, Zachrisson A, Thellbro, C.,... Sveriges, L. (2020) Landscape approaches to sustainability—aspects of conflict, integration, and synergy in national public land-use interests. Sustainability (Basel, Switzerland) 12(12):5113
Torres A, Jaeger JAG, Alonso JC (2016) Multi-scale mismatches between urban sprawl and landscape fragmentation create windows of opportunity for conservation development. Landsc Ecol 31(10):2291–2305
Vargas-Guzman JA, Myers DE, Warrick AW (2000) Derivatives of spatial variances of growing windows and the variogram. Math Geol 32(7):851–871
Verburg PH, Soepboer W, Veldkamp A, Limpiada R, Espaldon V, Mastura SS (2002) Modeling the spatial dynamics of regional land use: the CLUE-S model. Environ Manage 30(3):391–405
Wang X, Blanchet FG, Koper N, Tatem A, Tatem A (2014) Measuring habitat fragmentation: an evaluation of landscape pattern metrics. Methods Ecol Evol 5(7):634–646
Wang J, Zhang J, Xiong N, Liang B, Wang Z, Cressey EL (2022) Spatial and temporal variation, simulation and prediction of land use in ecological conservation area of Western Beijing. Remote Sens 14(6):1452
Wang L, Zhang S, Xie Y, Liu Y, Liu Y (2022) How does different cropland expansion trajectories affect cropland fragmentation? Insights from three urban agglomerations in Yangtze River Economic Belt, China. Front Ecol Evol. https://doi.org/10.3389/fevo.2022.927238
Wei L, Luo Y, Wang M, Su S, Pi, J.,... Li, G. (2020) Essential fragmentation metrics for agricultural policies: linking landscape pattern, ecosystem service and land use management in urbanizing China. Agric Syst 182:102833
Wu J (2004) Effects of changing scale on landscape pattern analysis: scaling relations. Landsc Ecol 19(2):125–138
Wu J (2021) Landscape sustainability science (II): core questions and key approaches. Landsc Ecol 36(8):2453–2485
Wu L, He D, You W, Ji Z, Huang X (2020) A gradient analysis of coastal landscape fragmentation change in Dongshan Island, China. Acta Ecol Sin 40(3):1055–1064
Xu X, Liu J, Zhang S, Li R, Yan C, Wu S (2022) China’s multi-period land use land cover remote sensing monitoring data set (CNLUCC). Resour Environ Sci Data Registration Publ Syst. https://doi.org/10.12078/2022082501
Xu X, Liu J, Zhang S, Li R, Yan C, Wu S (2022) Annual spatial interpolation dataset of meteorological elements in China. Resour Environ Sci Data Registration Publ Syst. https://doi.org/10.12078/2022082501
Yao X, Yu K, Deng Y, Liu J, Lai Z (2019) Spatial variability of soil organic carbon and total nitrogen in the hilly red soil region of Southern China. J For Res 31(6):2385–2394
Zhang Y, Yin H, Zhu L, Miao C (2021) Landscape fragmentation in Qinling-Daba mountains nature reserves and its influencing factors. Land 10(11):1124
Zhang Y, Sharma S, Bista M, Li M (2022) Characterizing changes in land cover and forest fragmentation from multitemporal Landsat observations (1993–2018) in the Dhorpatan Hunting Reserve. Nepal J For Res 33(1):159–170
Zhao H, Gu T, Tang J, Gong Z, Zhao P (2023) Urban flood risk differentiation under land use scenario simulation. iScience 26(4):106479
Zheng Q, Chen W, Li S, Yu L, Zhang X, Liu, L.,... Liu, C. (2021) Accuracy comparison and driving factor analysis of LULC changes using multi-source time-series remote sensing data in a coastal area. Eco Inform 66:101457
Zhou Y, Chen T, Feng Z, Wu K (2022) Identifying the contradiction between the cultivated land fragmentation and the construction land expansion from the perspective of urban-rural differences. Eco Inform 71:101826
Zou L, Wang J, Bai M (2022) Assessing spatial–temporal heterogeneity of China’s landscape fragmentation in 1980–2020. Ecol Ind 136:108654
Acknowledgements
The authors would like to thank the project team members for their collaboration. We are grateful for the joint guidance and support from two universities, Shanghai Jiao Tong University and East China Normal University. Thanks for the data and technology support from the Digital Engineering Technology Innovation Center for Territorial and Spatial Ecological Governance. Thanks for the data review from Tongji Urban Planning & Design Institute. Thanks for the funding from the National Natural Science Foundation of China.
Funding
This research was funded by (1) Big Data-Driven Ecological Security and Natural Resources Early Warning Plan, Major Program of National Fund of Philosophy and Social Science, National Natural Science Foundation of China (Grant No. 19JZD023); (2) Ecological Control of Water Sources in the Yangtze River Delta Green Ecological Integration Demonstration Area Based on Matching Supply and Demand of Ecosystem Services and Transboundary Flows, Young Scientists Fund, National Natural Science Foundation of China (Grant No. 72104232); (3) Synergistic Ecosystem Services and Optimization of Multifunctional Land Regulation in Shanghai and Its Surrounding Areas, Science and Technology Innovation Plan, Shanghai Science and Technology Commission (Grant No. 23692117800).
Author information
Authors and Affiliations
Contributions
ZZ: Data curation, Methodology, Formal analysis, Software, Results analysis, Roles/Writing—original draft. GH: Conceptualization, Supervision, Visualization. WC: Writing—review & editing. QZ: Software, Validation. XL: Field investigation and Data review. FD: Field investigation and Data review. YC: Writing—review & editing, Funding acquisition, Project administration.
Corresponding author
Ethics declarations
Competing interests
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Zhang, Z., He, G., Cai, W. et al. Spatial planning constraints will mitigate the fragmentation trajectory of natural and semi-natural landscapes: a case of Lushan City, China. Landsc Ecol 39, 59 (2024). https://doi.org/10.1007/s10980-024-01857-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10980-024-01857-5