
Abstract
Context
Neutral landscape models generate virtual landscapes that enable computer-based exploration of the effects of spatial patterns on ecological processes free from the restrictions of real-world experimentation. For some questions in landscape ecology it is critical to incorporate human landscape features, such as networks, that are an integral part of human-influenced landscapes.
Objectives
This paper outlines an approach to produce a neutral landscape model that uses the human geography principle of least-cost movement to create a network of human sites (buildings, camps, mines, settlements, farms, factories, etc.) and routes (trails, roads, railways, canals, powerlines, etc.).
Methods
We used a least-cost modelling framework to create sites prioritised on least-cost catchment areas and routes based on least-cost paths. The location of sites and routes is determined by an underlying cost-surface that defines how movement costs vary across the landscape. The range of possible network patterns was quantified via raster network metrics and was compared to real-world network data.
Results
The proposed neutral landscape model produces networks with a wide range of possible patterns, and using real-world data can guide the selection of parameters that mimic human activity in a variety of land cover classes in real-world landscapes.
Conclusions
This network neutral landscape model extends the potential of neutral landscape models for research into human-influenced landscapes. We provide the code used to generate our examples under a permissive open-source licence.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
A neutral landscape model (NLM) generates a virtual landscape that enables computer-based exploration of the effects of spatial patterns on ecological processes, free from the restrictions of real-world experimentation (With and King 1997; Wang and Malanson 2008; Turner and Gardner 2015). A wide array of NLMs are available, which vary in that they can have categorical, continuous, hierarchical, fractal, or spectral properties, and have been discussed and illustrated in previous review and methods papers (Wang and Malanson 2008; Etherington et al. 2015).
NLMs usually seek to create spatial patterns that mimic natural landscape features, such as elevational gradients or vegetation distributions, without representing the underlying generating processes. However, because landscape patterns often result from social-ecological processes (Turner and Gardner 2015), landscape ecologists require NLMs that mimic human landscape features. For example, NLMs that mimic landscapes dominated by human activity have been developed (Langhammer et al. 2019; Etherington et al. 2022), but we also need methods that can extend existing NLMs to include networks of human features such as sites (e.g., buildings, camps, mines, settlements, farms, factories) and routes (e.g., trails, roads, railways, canals, powerlines). These human networks have been an integral part of human-influenced landscapes for millennia, and act as landscape conduits and filters that affect ecological processes (Forman 1995).
To develop a network NLM of human sites and routes, we take inspiration from human geography models for the location of sites and routes developed by the German geographers von Thünen, Weber, Christaller, and Lösch in the 19th and early 20th centuries (Haggett 1965). The fundamental principle is least-cost movement, recognising that some parts of a landscape will be more costly to traverse in terms of energy, money, or time, and, therefore, that important sites and routes will be located to minimise movement costs. This principle of least-cost movement for site and route locations is also consistent with landscape ecology, as the geocomputation technique of least-cost modelling is commonly used by ecologists to explore landscape connectivity (Etherington 2016). The required input is a cost-surface raster that quantifies how movement costs (in terms of energy expenditure, financial cost, or time taken) vary across the landscape as a function of one or more landscape factors, such as land cover or slope. Cells with higher costs in the cost-surface raster are less preferable for movement, and cells attributed with null data or infinite costs are complete barriers to movement.
Using the principle of least-cost movement and the method of least-cost modelling, we outline an approach to produce novel NLMs that represent human networks developed from site and route patterns. This approach may be applied to extend existing NLMs to include a human network and hence better understand the effects of human landscape patterns on social-ecological processes.
NLM Algorithm
Locating sites
Sites represent fixed locations of human activity, such as buildings, cities, towns, mines, or camps. We use point locations to represent sites with the meaning of these points varying as a function of spatial scale. For example, in landscapes with smaller spatial extents and spatial grain (or resolution), these points could represent individual farm buildings, whereas in landscapes with larger extents or coarser grain they could represent whole farms.
A Halton point process (Halton and Smith 1964) was used to create a user-specified number of sites across all finite cells of the cost-surface, or optionally site locations can be limited to a specified region of the cost-surface (Fig. 1a). The Halton point pattern was used because it is a non-random deterministic method like least-cost modelling that always produces the same result for the same analytical conditions, and it produces an irregular pattern that more evenly samples space than a purely random pattern (Wong et al. 1997; Robertson et al. 2013). While the Halton points will not be the true optimal set of site locations, human landscape features are unlikely to be located optimally, given planning inefficiencies and historical contingencies (Haggett 1965; Forman 1995), so this is not a serious concern, especially as NLMs need only produce realistic patterns rather than realistically represent generating processes.

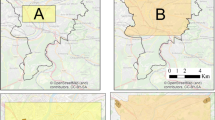
Example of locating sites where (a) a Halton point sample of nine sites is generated in a specified region, and (b) the sites are ranked in priority order from largest to smallest least-cost catchment area generated from the underlying cost-surface. In this example no data values can be envisaged as water, and with costs increasing as a function of elevation with infinite cost for mountains above a certain elevation threshold
Human sites usually have a natural order of importance. For example, settlements that are better connected to wider parts of the landscape are generally larger and offer more services to populations within their catchment areas (Haggett 1965). Therefore, in our model sites were priority ordered based on their least-cost catchment area. Least-cost catchments were calculated as least-cost (or shortest-path) Voronoi diagrams (Okabe et al. 2000) that identify the regions of space closest to each site in least-cost terms (Herzog 2013, 2014). Sites were then ranked in priority order from largest to smallest catchment area (Fig. 1b).
Locating routes
Routes represent bidirectional pathways of human movement, communication, or activity, such as roads, railways, or powerlines. Routes were defined by least-cost paths for (i) intra-landscape routes, and (ii) inter-landscape routes.
Intra-landscape routes are established between neighbouring sites. The Gabriel graph (Gabriel and Sokal 1969) has been used successfully to create virtual road networks (Galin et al. 2011; van Strien and Grêt-Regamey 2016). Therefore, neighbouring sites were identified based on a Gabriel graph (Fig. 2a), and intra-landscape routes were then created as least-cost paths between the neighbouring sites. Sites were connected by routes based on the priority order given to sites with the larger catchment areas defined during site location (Fig. 2a). Each time a least-cost path route is generated, the cost values for cells selected as part of a route are given a new cost value of one to recognise that the establishment of a route would reduce future movement costs across the landscape. This process is important to encourage new routes to connect with existing routes to form a coherent network. Without this encouragement, routes are likely to run parallel to one another and would require merging in a subsequent step (Galin et al. 2011).

Example of locating routes where (a) neighbouring sites are defined by a Gabriel graph and are connected in priority order by intra-landscape routes, and (b) all sites are connected in priority order to landscape edge cells by inter-landscape routes. All routes are least-cost paths generated from the underlying cost-surface
In creating a network of routes, it is important to recognise that NLMs usually represent a subset of a larger landscape. Therefore, inter-landscape routes need to be created as part of the NLM to mimic connections to neighbouring landscapes. This is an important step, as without these inter-landscape routes the NLM risks incorporating an unrealistic edge effect in which there is an absence of routes around the edge of the landscape. To prevent this, landscape edge cells are first identified as all finite cost-surface cells that are in the first or last row or column of the landscape, or that neighbour a contiguous group of null value cells that include the first or last row or column of the landscape (Fig. 2b). If we imagine the null value cells represent bodies of water, this process attempts to mimic that a coastline in a rectilinear landscape could be a landscape edge via a port whereas a lakeshore would not. After completing the intra-landscape routes for each site, the NLM algorithm creates an inter-landscape route for each site as the least-cost path from the site to the landscape edge cells and updates the cost values for the route as per the intra-landscape routes. The process of locating intra- and inter-landscape routes results in the final NLM that contains a network, in which all sites are connected by routes to each other and the landscape edge (Fig. 2b).
NLM network patterns and realism
Network patterns
Our network NLM requires only two required input parameters: (i) a cost-surface and (ii) a number of sites to connect with routes. As with any NLM, we may ask how network patterns vary as a function of these input parameters, and how well the resultant network patterns mimic real-world network patterns. To examine these questions we followed the framework presented by Saura and Martínez-Millán (2000) that used landscape pattern metrics to examine the range of NLM patterns that could be produced by varying input parameters, and then compared the range of NLM patterns to patterns from real landscapes.
There are many metrics for characterising spatial networks (Barthélemy 2011). However, as our least-cost modelling based NLM uses a raster data model to integrate with existing NLMs (Etherington et al. 2015), we need to adapt any network metric to a form that is suitable for raster data. In doing so, we have followed the advice of Turner and Gardner (2015) and chose to minimise the number of metrics and to use computationally simple metrics that are easily interpreted. Therefore, we focus on the fundamental properties of network density and shape (Haggett 1965) via two simple metrics adapted to a raster data model. Our first raster network metric relates to network density, but as we are working with a raster data, we can most logically express this as the ‘network proportion’ (NP) which is the proportion of the landscape cells containing a network route. Our second raster network metric captures changes in network shape via the ‘mean patch proportion’ (MPP), which is the mean size of patches. In this case, patches are defined as contiguous non-route parts of the landscape, created by the division of a landscape by routes. The mean match proportion is thus expressed as the mean of the patch sizes as a proportion of the whole landscape. As proportions, both NP and MPP metrics scale between zero and one, making it possible to directly compare these indicator values between landscapes. As landscape metrics are sensitive to scale (Turner and Gardner 2015) we note that all raster network metric analyses were calculated for landscapes with 5 × 5 km extents and 25 m grain.
Using some simple examples of landscapes with uniform costs it becomes evident that changes in landscape costs and the number of sites interact in their effects on the NP and MPP metrics. In general terms, increasing the number of sites creates denser networks that increase NP and decrease MPP, while increasing the landscape cost creates more tree-like networks that decrease NP and increase MPP (Fig. 3). When a wider range of landscape costs and number of sites are considered, clear gradients form that demonstrate that a wide range of network patterns can be created by our network NLM by changing the two required input parameters (Fig. 4).

Examples of how the network neutral landscape model patterns vary as a function of the two input parameters of landscape cost and number of sites. All landscapes are uniform in cost and have 5 × 5 km extents with 25 m grain, with landscape cost increasing from top to bottom and number of sites increasing from left to right. Network patterns are quantified via the network proportion (NP) and mean patch proportion (MPP) raster network metrics that both range between zero and one

Systematic exploration of how the network proportion (NP) and mean patch proportion (MPP) raster network pattern metrics vary for uniform cost landscapes with 5 × 5 km extents with 25 m grain as a function of the network neutral landscape model input parameters of landscape cost and number of sites (also expressed as site density). Note, the x and y axes are not linearly scaled, and the letters represent the specific examples illustrated in Fig. 3
Network realism
While a range of network patterns can be created, a logical next question is how well these patterns mimic real-world networks. To examine this question, we analysed road networks of New Zealand in landscapes dominated by one of four different land cover classes: urban (settlements, urban parkland, and transport infrastructure), forestry (planted and harvested production forest), grassland (intensive pastoral grazing), and cropland (perennial and short-rotation crops). We used Halton point sampling (Robertson et al. 2013) to identify points of origin for 50 landscapes with extents of 5 × 5 km and grain of 100 m (the minimum mapping unit of the underlying land cover data) that were covered by at least 75% of each target land cover class (MWLR 2020). The road network in each of these 5 × 5 km landscapes was extracted at a grain of 25 m from 1:50,000 road data (LINZ 2023) for which the NP and MPP raster network metrics were then calculated. The distributions of NP and MPP values clearly demonstrate that in New Zealand different land cover classes are associated with different road network characteristics. Urban road networks have a much higher NP (Fig. 5a) and much lower MPP (Fig. 5b) values when compared to the other land cover classes, meaning that urban landscape road networks were the most dense and interconnected networks. The cropland, forestry, and grassland road networks all had similar amounts of roads and hence NP values that were much lower than urban road networks (Fig. 5a). While there was significant overlap in MPP values there does appear to be some difference in road network shape with agricultural networks with lower MPP values being the most interconnected in shape, while grassland networks with the higher MPP values are the most tree-like in shape (Fig. 5b).

Distribution of network proportion (NP) and mean patch proportion (MPP) raster network pattern metrics for 50 road networks in four different types of landscapes of New Zealand with 5 × 5 km extents with 25 m grain. Distributions show the median, inter-quartile, and 5th and 95th percentile values
Comparing the range of network patterns that can be created (Fig. 4) to the range of network patterns observed in real landscapes (Fig. 5) allowed us to identify parameter combinations that create network patterns that mimic observed network patterns for each land cover class (Fig. 6). For example, while there are multiple parameter combinations that produce NLM network patterns with NP and MPP values that mimic those of urban road networks, it is only when using a landscape cost of 1.1 and a site density of 15.36 sites km−2 that the NLM network pattern’s density and shape both mimic real-world urban road networks (Fig. 6a). Therefore, we can be confident that using these cost and site parameters will produce NLM network patterns that mimic real-world urban road networks. For cropland, grassland, and forestry land cover class road networks there are multiple cost and site parameter combinations that will produce NLM network patterns that will mimic both the density and shape of real-world road networks (Fig. 6b-d).

For a systematic exploration of network neutral landscape model input parameters of landscape cost and number of sites (also expressed as site density), the parameter combinations that fall within the 5th to 95th percentile range of the network proportion (NP) and mean patch proportion (MPP) raster network pattern metrics for 50 road networks from each different type of real-world New Zealand landscapes are shown
To demonstrate how existing NLMs can be extended to include our network NLM, we use an example of a 5 × 5 km extent and 25 m grain Perlin noise NLM (Etherington 2022) that has been categorised into urban, cropland, grassland, and forestry land cover classes (Fig. 7). With reference to the sets of parameters that we now know will produce road networks that mimic real-world patterns we can select appropriate cost and site parameters for the urban (cost = 1.1, site density = 15.36 sites km−2), cropland (cost = 2.2, site density = 1.92 sites km−2), grassland (cost = 2.2, site density = 0.96 sites km−2), and forestry (cost = 8.8, site density = 7.68 sites km−2) land cover classes to add a network NLM that we are confident mimics real-world road networks in New Zealand (Fig. 7).

An example of how a four class 5 × 5 km extent and 25 m grain neutral landscape model can be extended to include a network neutral landscape model. Each land cover class has a landscape cost and number sites combination of input parameters that are known to produce network patterns that mimic those observed in New Zealand
Discussion
While the least-cost modelling framework underpinning our NLM is deterministic, a broad range of network patterns can be created via changes in the cost-surface and number of sites parameters. Therefore, once appropriately parameterised, we believe our network NLM can produce patterns that mimic human activity in a variety of landscapes. Users of this network NLM could follow a similar approach that we used here for road networks in New Zealand land cover classes to ensure they are selecting cost and site parameters that will produce network patterns appropriate for their specific application.
We believe that using a least-cost modelling framework as the basis for the NLM should make this NLM readily accessible to landscape ecologists, given the frequency with which least-cost modelling is used in landscape connectivity research (Etherington 2016). However, as least-cost modelling has its theoretical roots in transport geography (Warntz 1957) with the first computerised methods developed for planning road routes (Turner 1978) and further applications including planning routes of powerlines (Huber and Church 1985) and footpaths (Rees 2004), least-cost modelling is also extremely well suited for developing a variety of contemporary human networks. Least-cost modelling is also commonly used in other human-focused geographical disciplines; for example, in archaeology to understand locational choices of sites and routes in prehistory (Herzog 2014). This link with archaeological applications is important, because NLMs have also been advocated for palaeoecological contexts (Perry et al. 2016) in which human processes often contribute to landscape pattern. Therefore, while least-cost modelling has well-established applications to transport geography in contemporary landscapes, we envisage that our NLM could be applied in palaeoecological contexts as well.
Our network NLM could be further developed to introduce additional realism. For example, hierarchical ordering is an important principle of human geography relating to locations of sites and routes. Sites at each hierarchical level have non-overlapping territories, and higher hierarchical levels have fewer sites and larger territories. Sites are connected by routes at each hierarchical level to form a hierarchical network of routes in which higher sites are connected by higher routes (Haggett 1965). Hierarchical structuring is consistent with the use of hierarchical structures in generating NLMs in landscape ecology (O’Neill et al. 1992; Etherington 2022; Etherington et al. 2022) and virtual hierarchical road networks have been created for use in computer graphics (Galin et al. 2011). Other examples of introducing additional realism could include the use of more advanced forms of least-cost modelling. Anisotropic directionality could be included such that movement costs become direction dependent (Zhan et al. 1993; Collischonn and Pilar 2000). There could also be restrictions on turning angles of routes to prevent unrealistically tortuous routes from being generated (Galin et al. 2010). If landscape features such as water or mountains are included with appropriate costs then least-cost modelling as implemented here can create NLM networks with bridges or tunnels forming part of the network (Galin et al. 2010), but more sophisticated forms of least-cost modelling can create bridges and tunnels as connections between non-adjacent cost-surface cells (Yu et al. 2003). Such modified cost-surface structures have been used to generate the least-cost paths and catchments that underpin our network NLM (Etherington 2012) so such approaches could be adopted if needed.
Whether this increasing realism is necessary in a network NLM will depend on the application. NLMs are a caricature of a landscape that seek to mimic the essential and relevant landscape characteristics needed to explore a scientific question (With and King 1997), rather than trying to faithfully replicate landscapes in their entirety, which is more relevant for the virtual worlds created in computer graphics applications (Galin et al. 2010, 2011). Therefore, achieving additional realism via more complex algorithms requiring more parameters may be counterproductive for NLMs because they may make analysis of simulations involving them less tractable. However, given the potential for development of this NLM, we provide the code used to generate our examples under a permissive open licence as part of the NLMpy package (Etherington et al. 2015) from version 1.2.0 such that further development is possible where warranted.
Data availability
The land cover (MWLR 2020) and road (LINZ 2023) data for New Zealand are both openly available under permissive CC-BY licences.
Code Availability
The Python code used to generate our examples is available under a permissive MIT licence at https://doi.org/10.7931/63m7-4g79. The Python code uses the NLMpy (Etherington et al. 2015), NumPy (Harris et al. 2020), SciPy (Virtanen et al. 2020), gdal (GDAL/OGR contributors 2023), and Matplotlib (Hunter 2007) packages that are also openly available.
References
Barthélemy M (2011) Spatial networks. Phys Rep 499:1–101
Collischonn W, Pilar JV (2000) A direction dependent least-cost-path algorithm for roads and canals. Int J Geogr Inf Sci 14:397–406
Etherington TR (2012) Mapping organism spread potential by integrating dispersal and transportation processes using graph theory and catchment areas. Int J Geogr Inf Sci 26:541–556
Etherington TR (2016) Least-cost modelling and landscape ecology: concepts, applications, and opportunities. Curr Landsc Ecol Rep 1:40–53
Etherington TR (2022) Perlin noise as a hierarchical neutral landscape model. Web Ecol 22:1–6
Etherington TR, Holland EP, O’Sullivan D (2015) NLMpy: a Python software package for the creation of neutral landscape models within a general numerical framework. Methods Ecol Evol 6:164–168
Etherington TR, Morgan FJ, O’Sullivan D (2022) Binary space partitioning generates hierarchical and rectilinear neutral landscape models suitable for human-dominated landscapes. Landsc Ecol 37:1761–1769
Forman RTT (1995) Land mosaics. Cambridge University Press, Cambridge
Gabriel KR, Sokal RR (1969) A new statistical approach to geographic variation analysis. Syst Biol 18:259–278
Galin E, Peytavie A, Maréchal N, Guérin E (2010) Procedural generation of roads. Comput Graphics Forum 29:429–438
Galin E, Peytavie A, Guérin E, Beneš B (2011) Authoring hierarchical road networks. Comput Graphics Forum 30:2021–2030
GDAL/OGR contributors (2023) GDAL/OGR Geospatial Data Abstraction software Library. https://gdal.org. Open Source Geospatial Foundation. https://doi.org/10.5281/zenodo.5884351
Haggett P (1965) Locational analysis in human geography. Edward Arnold, London
Halton JH, Smith GB (1964) Algorithm 247: radical-inverse quasi-random point sequence. Commun ACM 7:701–702
Harris CR, Millman KJ, van der Walt SJ, Gommers R, Virtanen P, Cournapeau D, Wieser E, Taylor J, Berg S, Smith NJ, Kern R, Picus M, Hoyer S, van Kerkwijk MH, Brett M, Haldane A, del Río JF, Wiebe M, Peterson P, Gérard-Marchant P, Sheppard K, Reddy T, Weckesser W, Abbasi H, Gohlke C, Oliphant TE (2020) Array programming with NumPy. Nature 585:357–362
Herzog I (2014) A review of case studies in archaeological least-cost analysis. Archeologia E Calcolatori 25:223–239
Herzog I (2013) Least-cost networks. In: Earl G, Sly T, Chrysanthi A et al (eds) Archaeology in the Digital era. Amsterdam University Press, Amsterdam, pp 237–248
Huber DL, Church RL (1985) Transmission corridor location modeling. J Transp Eng 111:114–130
Hunter JD (2007) Matplotlib: a 2D graphics environment. Comput Sci Eng 9:90–95
Land Information New Zealand [LINZ] (2023) NZ Road Centrelines (Topo, 1:50k). Available from https://data.linz.govt.nz/layer/50329-nz-road-centrelines-topo-150k/ accessed 1 August 2023
Langhammer M, Thober J, Lange M, Frank K, Grimm V (2019) Agricultural landscape generators for simulation models: a review of existing solutions and an outline of future directions. Ecol Modell 393:135–151
Manaaki Wheua - Landcare Research [MWLR] (2020) LCDB v5.0 - Land Cover Database version 5.0, Mainland New Zealand. Available from https://lris.scinfo.org.nz/layer/104400-lcdb-v50-land-cover-database-version-50-mainland-new-zealand/ accessed 23 August 2023
O’Neill RV, Gardner RH, Turner MG (1992) A hierarchical neutral model for landscape analysis’. Landsc Ecol 7:55–61
Okabe A, Boots B, Sugihara K, Chiu SN (2000) Spatial tessellations: concepts and applications of Voronoi diagrams. Wiley, Chichester
Perry GLW, Wainwright J, Etherington TR, Wilmshurst JM (2016) Experimental simulation: using generative modeling and palaeoecological data to understand human-environment interactions. Front Ecol Evol 4:109
Rees WG (2004) Least-cost paths in mountainous terrain. Comput Geosci 30:203–209
Robertson BL, Brown JA, McDonald T, Jaksons P (2013) BAS: balanced acceptance sampling of natural resources. Biometrics 69:776–784
Saura S, Martínez-Millán J (2000) Landscape patterns simulation with a modified random clusters method. Landsc Ecol 15:661–678
Turner AK (1978) A decade of experience in computer aided route selection. Photogram Eng Remote Sens 44:1561–1576
Turner MG, Gardner RH (2015) Landscape Ecology in Theory and Practice: pattern and process. Springer, New York
van Strien MJ, Grêt-Regamey A (2016) How is habitat connectivity affected by settlement and road network configurations? Results from simulating coupled habitat and human networks. Ecol Modell 342:186–198
Virtanen P, Gommers R, Oliphant TE, Haberland M, Reddy T, Cournapeau D, Burovski E, Peterson P, Weckesser W, Bright J, van der Walt SJ, Brett M, Wilson J, Millman KJ, Mayorov N, Nelson ARJ, Jones E, Kern R, Larson E, Carey CJ, Polat İ, Feng Y, Moore EW, VanderPlas J, Laxalde D, Perktold J, Cimrman R, Henriksen I, Quintero EA, Harris CR, Archibald AM, Ribeiro AH, Pedregosa F, van Mulbregt P, Vijaykumar A, Bardelli AP, Rothberg A, Hilboll A, Kloeckner A, Scopatz A, Lee A, Rokem A, Woods CN, Fulton C, Masson C, Häggström C, Fitzgerald C, Nicholson DA, Hagen DR, Pasechnik DV, Olivetti E, Martin E, Wieser E, Silva F, Lenders F, Wilhelm F, Young G, Price GA, Ingold G-L, Allen GE, Lee GR, Audren H, Probst I, Dietrich JP, Silterra J, Webber JT, Slavič J, Nothman J, Buchner J, Kulick J, Schönberger JL, de Cardoso M, Reimer JV, Harrington J, Rodríguez J, Nunez-Iglesias JLC, Kuczynski J, Tritz J, Thoma K, Newville M, Kümmerer M, Bolingbroke M, Tartre M, Pak M, Smith M, Nowaczyk NJ, Shebanov N, Pavlyk N, Brodtkorb O, Lee PA, McGibbon P, Feldbauer RT, Lewis R, Tygier S, Sievert S, Vigna S, Peterson S, More S, Pudlik S, Oshima T, Pingel T, Robitaille TJ, Spura TP, Jones T, Cera TR, Leslie T, Zito T, Krauss T, Upadhyay T, Halchenko U, Vázquez-Baeza YO (2020) SciPy 1.0: fundamental algorithms for scientific computing in Python. Nat Methods 17:261–272
Wang Q, Malanson GP (2008) Neutral landscapes: bases for exploration in landscape ecology. Geogr Compass 2:319–339
Warntz W (1957) Transportation, social physics, and the law of refraction. Prof Geogr 9:2–7
With KA, King AW (1997) The use and misuse of neutral landscape models in ecology. Oikos 79:219–229
Wong T-T, Luk W-S, Heng P-A (1997) Sampling with Hammersley and Halton Points. J Graphics Tools 2:9–24
Yu C, Lee J, Munro-Stasiuk MJ (2003) Extensions to least-cost path algorithms for roadway planning. Int J Geogr Inf Sci 17:361–376
Zhan C, Menon S, Gao P (1993) A directional path distance model for raster distance mapping. In: Frank AU, Campari I (eds) Spatial information theory: a theoretical basis for GIS. Springer, Berlin, pp 434–443
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions. This work was supported by the Strategic Science Investment Funding for Crown Research Institutes from the New Zealand Ministry of Business, Innovation and Employment’s Science and Innovation Group and The University of Auckland Faculty Research Development Fund (grant no. 3702237).
Author information
Authors and Affiliations
Contributions
Conceptualisation: TRE, DO, GLWP, DRR, JW; Methodology: TRE; Software: TRE; Writing—original draft preparation: TRE; review and editing: TRE, DO, GLWP, DRR, JW.
Corresponding author
Ethics declarations
Conflicts of interest
The authors have no conflicts of interest or competing interests to declare.
Ethical approval
Not applicable.
Consent to participate
Not applicable.
Consent for publication
Not applicable.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Etherington, T.R., O’Sullivan, D., Perry, G.L.W. et al. A least-cost network neutral landscape model of human sites and routes. Landsc Ecol 39, 52 (2024). https://doi.org/10.1007/s10980-024-01836-w
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10980-024-01836-w