
Abstract
This paper investigates the sensitivity analysis of a scalar mechanical contact problem described by a boundary value problem involving the Tresca’s friction law. The sensitivity analysis is performed with respect to right-hand source and boundary terms perturbations. In particular, the friction threshold involved in the Tresca’s friction law is perturbed, which constitutes the main novelty of the present work with respect to the existing literature. Hence, we introduce a parameterized Tresca friction problem and its solution is characterized by using the proximal operator associated with the corresponding perturbed nonsmooth convex Tresca friction functional. Then, by invoking the extended notion of twice epi-differentiability depending on a parameter, we prove the differentiability of the solution to the parameterized Tresca friction problem, characterizing its derivative as the solution to a boundary value problem involving Signorini unilateral conditions. Finally, numerical simulations are provided in order to illustrate our main result.



Similar content being viewed by others

References
Adly, S., Bourdin, L.: Sensitivity analysis of variational inequalities via twice epi-differentiability and proto-differentiability of the proximity operator. SIAM J. Optim. 28(2), 1699–1725 (2018)
Adly, S., Bourdin, L., Caubet, F.: Sensitivity analysis of a Tresca-type problem leads to Signorini’s conditions. Under revision in ESAIM: Control, Optimisation and Calculus of Variations (submitted on Nov. 2019)
Aitchison, J.M., Poole, M.W.: A numerical algorithm for the solution of Signorini problems. J. Comput. Appl. Math. 94(1), 55–67 (1998)
Aliprantis, C.D., Burkinshaw, O.: Principles of real analysis, third edition Academic Press Inc, San Diego, CA (1998)
Attouch, H.: Variational convergence for functions and operators. Pitman (Advanced Publishing Program), Boston, MA, Applicable Mathematics Series (1984)
Ben Belgacem, F., Renard, Y.: Hybrid finite element methods for the Signorini problem. Math. Comput. 72, 1117–1145 (2003)
Brezis, H.: Opérateurs maximaux monotones et semi-groupes de contractions dans les espaces de Hilbert. North-Holland Mathematics Studies, No. 5. North-Holland Publishing Co., Amsterdam-London; American Elsevier Publishing Co., Inc., New York, (1973)
Brezis, H.: Functional analysis. Sobolev spaces and partial differential equations. Universitext. Springer, New York (2011)
Chouly, F.: An adaptation of Nitsche’s method to the Tresca friction problem. J. Math. Anal. Appl. 411(1), 329–339 (2014)
Chouly, F., Hild, P.: A Nitsche-based method for unilateral contact problems: numerical analysis. SIAM J. Numer. Anal. 51(2), 1295–1307 (2013)
Dautray, R., Lions, J.-L.: Mathematical analysis and numerical methods for science and technology, vol. 2. Springer-Verlag, Berlin (1988)
Do, C.N.: Generalized second-order derivatives of convex functions in reflexive banach spaces. Trans. Am. Math. Soc. 334(1), 281–301 (1992)
Girault, V., Raviart, P.-A.: Finite element methods for Navier-Stokes equations, volume 5 of Springer Series in Computational Mathematics. Springer-Verlag, Berlin, (1986)
Glowinski, R.: Numerical methods for nonlinear variational problems. springer series in computational physics. Springer-Verlag, New York (1984)
Glowinski, R., Lions, J.-L., Trémolières, R.: Numerical analysis of variational inequalities, volume 8 of Studies in Mathematics and its Applications. North-Holland Publishing Co., Amsterdam-New York, (1981)
Han, W.: A regularization procedure for a simplified friction problem. Math. Computer Modell. 15(8), 65–70 (1991)
Haslinger, J., Hlaváček, I., Nečas, J.: Numerical methods for unilateral problems in solid mechanics. In Handbook of numerical analysis, Vol. IV, Handb. Numer. Anal., IV, pages 313–485. North-Holland, Amsterdam, (1996)
Hecht, F.: New development in freefem++. J. Numer. Math. 20(3–4), 251–265 (2012)
Kuss, F.: Méthodes duales pour les problèmes de contact avec frottement. Université de Provence - Aix-Marseille I, Thèse (July 2008)
Lions, J.-L.: Sur les problémes unilatéraux, dans Séminaire Bourbaki : vol. 1968/69, exposés 347–363, Séminaire Bourbaki, no. 11 (1971), Exposé no. 350, 23 p. http://www.numdam.org/item/SB_1968-1969__11__55_0/
Marcus, M., Mizel, V.J.: Absolute continuity on tracks and mappings of Sobolev spaces. Arch. Rational Mech. Anal. 45, 294–320 (1972)
Minty, G.J.: Monotone (nonlinear) operators in Hilbert space. Duke Math. J. 29, 341–346 (1962)
Moreau, J.J.: Proximité et dualité dans un espace hilbertien. Bulletin de la Société Mathématique de France 93, 273–299 (1965)
Rockafellar, R.T.: On the maximal monotonicity of subdifferential mappings. Pacific J. Math. 33, 209–216 (1970)
Rockafellar, R.T.: Maximal monotone relations and the second derivatives of nonsmooth functions. Ann. Inst. H. Poincaré Anal. Non Linéaire 2(3), 167–184 (1985)
Rockafellar, R. T., Wets, R. J.-B.: Variational analysis, volume 317 of Grundlehren der mathematischen Wissenschaften [Fundamental Principles of Mathematical Sciences]. Springer-Verlag, Berlin, (1998)
Signorini, A.: Sopra alcune questioni di statica dei sistemi continui. Ann. Scuola Norm. Super. Pisa Cl. Sci. (2) 2(2), 231–251 (1933)
Signorini, A.: Questioni di elasticità non linearizzata e semilinearizzata. Rend. Mat. e Appl. 5(18), 95–139 (1959)
Sokolowski, J.: Sensitivity analysis of contact problems with prescribed friction. Appl. Math. Optim. 18(2), 99–117 (1988)
Tucsnak, M., Weiss, G.: Observation and control for operator semigroups. Birkhäuser Advanced Texts: Basler Lehrbücher. [Birkhäuser Advanced Texts: Basel Textbooks]. Birkhäuser Verlag, Basel, (2009)
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Paolo Maria Mariano.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Sufficient Conditions for the Twice Epi-Differentiability of the Parameterized Tresca Friction Functional
Sufficient Conditions for the Twice Epi-Differentiability of the Parameterized Tresca Friction Functional
In this appendix, the notations and assumptions introduced in Section 3 are preserved. This appendix follows from Remark 3.22. Our aim here is to prove, in some particular cases which correspond to practical situations, that the parameterized Tresca friction functional \(\Phi \) is twice epi-differentiable at \(u_{0}\) for \(F_{0}-u_{0}\in \partial \Phi (0,\cdot )(u_{0})\), with its second-order epi-derivative given by (3.11). From the characterization of Mosco epi-convergence (see Proposition 2.6), it is sufficient to prove that, for all \(w\in \mathrm {H}^{1}_{\mathrm {D}}(\Omega )\), the two conditions
-
(i)
for all \((w_{t})_{t>0}\subset \mathrm {H}^{1}_{\mathrm {D}}(\Omega )\) such that \((w_{t})_{t>0}\rightharpoonup w\) in \(\mathrm {H}^{1}_{\mathrm {D}}(\Omega )\), then
$$\begin{aligned} \mathrm {lim}\inf \Delta _{t}^{2}\Phi (u_{0}|F_{0}-u_{0})(w_{t})\ge & {} \mathrm {I}_{\mathcal {K}_{u_{0},\frac{\partial _{\mathrm {n}}(F_{0}-u_{0})}{g_{0}}}}(w)\\&+\int _{\Gamma _{\mathrm {T}}}g'_{0}(s)\frac{\partial _{\mathrm {n}}(F_{0}-u_{0})(s)}{g_{0}(s)}w(s)\mathrm {d}s ; \end{aligned}$$ -
(ii)
there exists \((w_{t})_{t>0}\subset \mathrm {H}^{1}_{\mathrm {D}}(\Omega )\) such that \((w_{t})_{t>0}\rightarrow w\) in \(\mathrm {H}^{1}_{\mathrm {D}}(\Omega )\) and
$$\begin{aligned} \mathrm {lim}\sup \Delta _{t}^{2}\Phi (u_{0}|F_{0}-u_{0})(w_{t})\le & {} \mathrm {I}_{\mathcal {K}_{u_{0},\frac{\partial _{\mathrm {n}}(F_{0}-u_{0})}{g_{0}}}}(w)\\&+\int _{\Gamma _{\mathrm {T}}}g'_{0}(s)\frac{\partial _{\mathrm {n}} (F_{0}-u_{0})(s)}{g_{0}(s)}w(s)\mathrm {d}s ; \end{aligned}$$
are satisfied.
The condition (i) is always satisfied. Indeed, from Proposition 3.17, this condition can be rewritten as
which is true thanks to the dense and compact embedding  , to the twice epi-differentiability of the function G(s) for almost all \(s\in \Gamma _{\mathrm {T}}\) (see Proposition 3.19) and to the classical Fatou’s lemma (see, e.g., [8, Lemma 4.1 p.90]).
, to the twice epi-differentiability of the function G(s) for almost all \(s\in \Gamma _{\mathrm {T}}\) (see Proposition 3.19) and to the classical Fatou’s lemma (see, e.g., [8, Lemma 4.1 p.90]).
The condition (ii) is obviously satisfied if \(w\notin \mathcal {K}_{u_{0},\frac{\partial _{\mathrm {n}}(F_{0}-u_{0})}{g_{0}}}\). Thus, one has only to prove the following assertion:
-
(ii’)
for all \(w\in \mathcal {K}_{u_{0},\frac{\partial _{\mathrm {n}}(F_{0}-u_{0})}{g_{0}}}\), there exists \((w_{t})_{t>0}\subset \mathrm {H}^{1}_{\mathrm {D}}(\Omega )\) such that \((w_{t})_{t>0}\rightarrow w\) in \(\mathrm {H}^{1}_{\mathrm {D}}(\Omega )\) and
$$\begin{aligned} \mathrm {lim}\sup \Delta _{t}^{2}\Phi (u_{0}|F_{0}-u_{0})(w_{t})\le \int _{\Gamma _{\mathrm {T}}}g'_{0}(s) \frac{\partial _{\mathrm {n}}(F_{0}-u_{0})(s)}{g_{0}(s)}w(s)\mathrm {d}s. \end{aligned}$$
Unfortunately, we are not able to prove this assertion in a general setting yet, that is without any additional assumption on \(u_{0}\) and on \(\Gamma \), and in any dimension \(d\ge 1\). Nevertheless, in this appendix, we prove this assertion in some particular cases which correspond to practical situations, providing sufficient conditions. In particular, in the next sections, we consider the additional assumption
-
(A)
the map \(t\in \mathbb {R}^{+}\mapsto g_{t}\in \mathrm {L}^{2}(\Gamma _{\mathrm {T}})\) is differentiable at \(t=0\).
1.1 First Example of Sufficient Condition: \(u=0\) a.e. on \(\Gamma _{\mathrm {T}}\)
In this first example, we assume that \(u_{0}=0\) a.e. on \(\Gamma _{\mathrm {T}}\), therefore \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}}}}\) has a null measure. Let \(w\in \mathcal {K}_{u_{0},\frac{\partial _{\mathrm {n}}(F_{0}-u_{0})}{g_{0}}}\). Then, taking the sequence \(w_{t}=w\) for all \(t>0\), one gets
when \(t\rightarrow 0^{+}\) from Assumption A. Therefore, Condition (ii’) is satisfied.
1.2 Second Example of Sufficient Condition: Truncature
In this second example, we introduce two disjoint subsets of \(\Gamma _{\mathrm {T}}\) given by
Hence, it follows that \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}}}} =\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}+}}} \cup \Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}-}}}\), \(\partial _{\mathrm {n}}u_{0}=-g_{0}\) a.e. on \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}+}}}\) and that \(\partial _{\mathrm {n}}u_{0}=g_{0}\) a.e. on \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}-}}}\). Now, let us assume that there exists \(C>0\) such that \(|u_{0}|\ge C\) on \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}+}}} \cup \Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}-}}}\). Let us consider \(w\in \mathcal {K}_{u_{0},\frac{\partial _{\mathrm {n}}(F_{0}-u_{0})}{g_{0}}}\) and the truncature \(w_{t}\in \mathrm {H}^{1}_{\mathrm {D}}(\Omega )\) of w defined by
for almost all \(x\in \Omega \) and for all \(t>0\). One deduces from Marcus–Mizel theorem (see [21]) that \(w_{t}\rightarrow w\) in \(\mathrm {H}^{1}_{\mathrm {D}}(\Omega )\) when \(t\rightarrow 0^{+}\). Moreover, for all \(t\le C^{2}\), one gets
when \(t\rightarrow 0^{+}\) from Assumption A; therefore, Condition (ii’) is satisfied.
1.3 Third Example of Sufficient Condition: Truncature and Dilatation
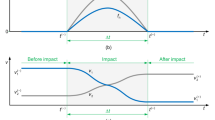
In this third example, we take \(d=2\) and \(\Gamma _{\mathrm {N}}=\emptyset \), and we assume that \(u_{0}\) and \(\partial _{\mathrm {n}}u_{0}\) are continuous on \(\Gamma \), and that \(\Gamma \) is diffeomorphic to the circle \(\mathrm {S}^{1}:=\left\{ (x,y)\in \mathbb {R}^{2} \mid x^{2}+y^{2}=1\right\} \). From this last assumption, for simplicity, we assume in the sequel that \(\Gamma =\mathrm {S}^{1}\). In what follows, the next hypotheses are only useful to simplify the computations. Let us assume that \(\Gamma _{\mathrm {T}}=\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S+}}}\cup \Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}+}}}\) (in this particular case, the hypothesis on the continuity of \(\partial _{\mathrm {n}}u_{0}\) is useless, see Remark A.1) where \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}+}}}\) has already been defined in the previous example, and with the following parameterizations
such that \(-\pi \le \xi _{1}<\gamma _{1}<\gamma _{2}<\xi _{2}\le \pi \) (see Figure 4). From the continuity of \(u_{0}\), there exists \(c>0\) such that \(u_{0}\ge c\) on the set \(\{(\cos {\theta },\sin {\theta })\in \Gamma \text {, } \theta \in \left[ \chi _{1},\chi _{2}\right] \}\subset \Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {N}+}}\), with \(\gamma _{1}<\chi _{1}<\chi _{2}<\gamma _{2}\). Let us consider \(\omega _{1}\in \left]\xi _{1},\gamma _{1}\right[\), \(\omega _{2}\in \left]\gamma _{2},\xi _{2}\right[\), and also \(\alpha _{t}\), \(\beta _{t}\) defined, for \(t>0\) such that \(\sqrt{t}\le c\), by
From the continuity of \(u_{0}\), ones deduces that \(\alpha _{t}\rightarrow \gamma _{1}\) and \(\beta _{t}\rightarrow \gamma _{2}\) when \(t\rightarrow 0^{+}\).

Illustration of the boundary \(\Gamma \)
Let \(w\in \mathcal {K}_{u_{0},\frac{\partial _{\mathrm {n}}(F_{0}-u_{0})}{g_{0}}}\), and let \(y_{t}\in \mathrm {H}^{1}_{\mathrm {D}}(\Omega )\) be the truncature of w given by
for almost all \(x\in \Omega \) and for all \(t>0\). As in the previous section, one gets \(y_{t}\rightarrow w\) in \(\mathrm {H}^{1}_{\mathrm {D}}(\Omega )\), and thus, \(y_{t|\Gamma }\rightarrow w_{|\Gamma }\) in \(\mathrm {H}^{1/2}(\Gamma )\) when \(t\rightarrow 0^{+}\). Let us consider, for \(t>0\) sufficiently small, the dilatation \(z_{t}:=y_{t|\Gamma } \circ d_{t}\) of \(y_{t|\Gamma }\), with \(d_{t}\) given by
where
Note that, since \(-\pi \le \xi _{1}<\omega _{1}<\omega _{2}<\xi _{2}\le \pi \) (see Remark A.2), then \(d_{t}\) is a well-defined bijective Lipschitz continuous map, and its inverse is also a bijective Lipschitz continuous map. Thus, it follows that \(z_{t}\in \mathrm {H}^{1/2}(\Gamma )\) and also \(z_{t}\rightarrow w_{|\Gamma }\) in \(\mathrm {H}^{1/2}(\Gamma )\) when \(t\rightarrow 0^{+}\). Then, for \(t>0\) sufficiently small, we denote by \(w_{t}\in \mathrm {H}^{1}_{\mathrm {D}}(\Omega )\) a lift of \(z_{t}\in \mathrm {H}^{1/2}(\Gamma )\), such that \(w_{t}\rightarrow w\) in \(\mathrm {H}^{1}_{\mathrm {D}}(\Omega )\) when \(t\rightarrow 0^{+}\). Therefore, by denoting
for \(t>0\) sufficiently small and for almost all \(s\in \Gamma _{\mathrm {T}}\), it follows that
Then, from the definition of \(d_{t}\) and Assumption A, one deduces that
when \(t\rightarrow 0^{+}\), and thus, Condition (ii’) is satisfied.
Remark A.1
In the case where \(\Gamma _{\mathrm {T}}=\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S+}}}\cup \Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}+}}}\), the hypothesis \(\partial _{\mathrm {n}}u_{0}\) continuous on \(\Gamma \) is useless. Nevertheless, in the general case \(\Gamma _{\mathrm {T}}=\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}+}}}\cup \Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}-}}}\cup \Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {D}}}}\cup \Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S-}}}\cup \Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S+}}}\), the hypotheses \(u_{0}\) and \(\partial _{\mathrm {n}}u_{0}\) continuous on \(\Gamma \) is sufficient to get the twice epi-differentiability of the parameterized Tresca friction functional: a part of \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S-}}}\) (resp. \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S+}}}\), resp. \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}-}}}\)) is never side to side with a part of \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}+}}}\) (resp. \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}-}}}\), resp. \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}+}}}\)), and thus, using an appropriate dilatation, one can obtain the same result.
Remark A.2
The hypothesis on the angles
avoids the problem of the definition of \(d_{t}\) for the point \((x_{1},x_{2})=(-1,0)\). But, in a more general case, since \(\Gamma _{\mathrm {D}}\) has a positive measure, it is always possible to translate the angles in order to overcome this difficulty and get a well-defined dilatation \(d_{t}\).
Remark A.3
The assumption \(\Gamma _{\mathrm {N}}=\emptyset \) can be replaced by the assumption that \(\Gamma _{\mathrm {N}}\) is never side to side with \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}+}}}\) and \(\Gamma ^{u_{0},g_{0}}_{\mathrm {T}_{\mathrm {S}_{\mathrm {N}-}}}\). Without one of those assumptions, the dilatation may not work.
Rights and permissions
About this article

Cite this article
Bourdin, L., Caubet, F. & Jacob de Cordemoy, A. Sensitivity Analysis of a Scalar Mechanical Contact Problem with Perturbation of the Tresca’s Friction Law. J Optim Theory Appl 192, 856–890 (2022). https://doi.org/10.1007/s10957-021-01993-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10957-021-01993-x
Keywords
- Mechanical contact problems
- Tresca’s friction law
- Signorini unilateral conditions
- Variational inequalities
- Convex subdifferential
- Proximal operator
- Sensitivity analysis
- Twice epi-differentiability