
Abstract
In this paper, we consider a dynamical system for solving equilibrium problems in the framework of Hilbert spaces. First, we prove that under strong pseudo-monotonicity and Lipschitz-type continuity assumptions, the dynamical system has a unique equilibrium solution, which is also globally exponentially stable. Then, we derive the linear rate of convergence of a discrete version of the proposed dynamical system to the unique solution of the problem. Global error bounds are also provided to estimate the distance between any trajectory and this unique solution. Some numerical experiments are reported to confirm the theoretical results.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The equilibrium problem (EP for short) is a very general mathematical model in the sense that it includes, as special cases, the optimization problem, the variational inequality, the saddle point problem, the Nash equilibrium problem in noncooperative games, the fixed point problem, and others; see, for instance, [1,2,3,4,5,6,7] and references quoted therein. The interest of this problem is that it unifies all these particular problems in a convenient way. In recent years, a large number of applications have been described successfully via the concept of equilibrium solution and therefore many researchers devoted their efforts to study EPs. For an excellent survey on existence of equilibrium points and solution methods for finding them, we refer the readers to the new monograph [8].
Since EP is a general model, the methods for solving particular problems can be often extended to EPs; see for example, [8,9,10,11,12,13,14,15,16,17,18,19]. Among them, fixed point-type methods play an important role, because they are simple in form and useful in practice. The idea of these methods comes from the proximal point and the projection methods for solving a variational inequality (VI for short) [1, 2, 13, 20]. It is proved in [19] that fixed point methods can efficiently solve the class of strongly monotone EPs and that the convergence rate of these methods is linear [17].
In recent years, dynamical systems have been widely investigated for solving fixed point problems, variational inequalities and monotone inclusions [21,22,23,24,25,26,27,28,29]. As a natural extension, it is interesting to study EPs from a continuous time perspective. This is the aim of this paper. To do so, we first look at the EP as a fixed point problem of a suitable operator. Then, the solutions set of the EP is approached by considering a dynamical system associated with the fixed point map. Under standard assumptions, namely strong pseudo-monotonicity and Lipschitz continuity, we prove that the proposed dynamical system has a unique equilibrium point. Moreover, we also prove that this equilibrium solution is globally exponentially stable. A discrete version of the proposed dynamical system is also considered, allowing one to prove the linear convergence of the corresponding algorithms. Finally, we provide global error bounds in order to estimate the distance between any arbitrary trajectory and the unique solution under the given assumptions.
The remaining part of the paper is organized as follows. In Sect. 2, we recall some preliminary results. Section 3 describes the proposed dynamical system and its global stability. Global error bounds are discussed in Sect. 4. Finally, some numerical experiments are reported in Sect. 5 to illustrate the obtained theoretical results.
2 Preliminaries
Let H be a real Hilbert space endowed with an inner product and its induced norm denoted \(\langle \cdot ,\cdot \rangle \) and \(\Vert \cdot \Vert \), respectively. Let C be a nonempty, closed and convex subset of H and let f be a function from \(C \times C\) to \(\mathbb {R}\) satisfying for each \(x \in C\), \(f(x,x)=0\) and such that the function \(f(x,\cdot )\) is convex, l.s.c and subdifferentiable on C. The equilibrium problem associated with f, in the sense of [4], is denoted by \(\text {EP}(f,C)\), and consists in finding a point \(x^* \in C\) such that
The set of solutions of \(\text {EP}(f,C)\) is denoted \(\text {Sol}(f,C) \).
When \(f(x,y)=\langle F(x), y-x \rangle \) for all \(x,y \in H\), the equilibrium problem \(\text {EP}(f,C)\) reduces to the classical variational inequality VI(F, C), which consists in finding a point \(x^* \in C\) such that
where \(F: H \rightarrow H\) is a continuous mapping. The solution set of this problem is abbreviated to \(\text {Sol}(F,C)\).
Another important particular case of equilibrium problem is the saddle point problem: Given two sets \(C_1 \subset H_1\) and \(C_2 \subset H_2\), where \(H_1\) and \(H_2\) are two real Hilbert spaces, a saddle point of a function \(G : C_1 \times C_2 \rightarrow \mathbb {R}\) is any \(x^* = ( x_1^* , x_2^* ) \in C_1 \times C_2 \) such that
holds for any \(y =(y_1,y_2)\in C_1 \times C_2\). Finding a saddle point of G amounts to solving \(\text {EP}(f, C)\) with \(C = C_1 \times C_2\) and
Indeed, a saddle point of G is a Nash equilibrium in a two-person zero-sum game, that is a noncooperative game where the cost function of the first player is G and the cost function of the second player is \(-G\) (see, e.g., [2, 8].)
We recall some well-known definitions useful in the sequel.
A mapping \(f: C \times C \rightarrow \mathbb R \) is said to be
- (a)
strongly monotone with modulus \(\gamma >0\) on C, if
$$\begin{aligned} f(x,y)+f(y,x) \le -\gamma \Vert x-y\Vert ^2 \quad \forall x,y \in C; \end{aligned}$$ - (b)
monotone on C, if
$$\begin{aligned} f(x,y)+f(y,x) \le 0 \quad \forall x,y \in C; \end{aligned}$$ - (c)
strongly pseudo-monotone with modulus \(\gamma >0\) on C, if
$$\begin{aligned} f(x,y) \ge 0 \Rightarrow f(y,x) \le -\gamma \Vert x-y\Vert ^2 \end{aligned}$$for all \(x,y \in C\);
- (d)
pseudo-monotone on C, if
$$\begin{aligned} f(x,y) \ge 0 \Rightarrow f(y,x) \le 0 \end{aligned}$$for all \(x,y \in C\).
Remark 2.1
The implications (a)\(\Longrightarrow \)(b), (a)\(\Longrightarrow \)(c), (c)\(\Longrightarrow \)(d) and (b)\(\Longrightarrow \)(d) are evident. Note also that property (c) guarantees that \(\text {EP}(f,C)\) cannot have more than one solution. Indeed, if \(x^*, y^*\in \text {Sol}(f,C)\) and if (c) is satisfied, then \(f(y^*,x^*)\ge 0\) and \(-f(y^*,x^*)\ge \gamma \Vert y^*-x^*\Vert ^2\). Adding these inequalities yields \(0\ge \gamma \Vert y^*-x^*\Vert ^2\) which forces \(y^*=x^*\).
We provide in the following a class of functions f, which is strongly pseudo-monotone but not strongly monotone. The example is a generalization of examples given in [30,31,32].
Example 2.1
Let \(H=l_2\), \(C \subset H\) and let \(f: C\times C \rightarrow \mathbb {R}\) be defined as
where \(\xi : C \rightarrow \mathbb {R}_{++}\) be a positive function satisfying \(\xi (x) \ge \xi >0\) for all \(x \in C\) and \(g: C\times C \rightarrow \mathbb {R} \) is \(\gamma \)-strongly monotone. We shall prove that f is strongly pseudo-monotone on C. Indeed, let \(x,y \in C\) be such that \(f(x,y) \ge 0\). Since \(\xi (x) \ge \xi >0\), we have \(g(x,y) \ge 0\). This and the strong monotonicity of g imply
i.e., f is \(\xi \gamma \)- strongly pseudo-monotone. In general f is not (strongly) monotone. For example, we can take \(\xi (x): = a-\Vert x\Vert \), \(g(x,y) = \left\langle x,y-x \right\rangle \) and
where \(0< a/2< b<a\). Then, f is not monotone. Indeed, take
then
Remark 2.2
When EP reduces to VI, i.e., \(f(x,y) = \left\langle F(x), y-x\right\rangle \) for all \(x,y \in H\), the (generalized) monotonicity of function f defined above corresponds to the well known (generalized) monotonicity of mapping F (see [33]).
On the other hand, a mapping \(f: C \times C \rightarrow \mathbb R \) is said to satisfy a Lipschitz-type condition on C if there exists a constant \(L>0\) such that
Remark 2.3
The Lipschitz-type condition (2) was introduced by Quoc and Muu [10]. We note that (2) is weaker than the Lipschitz-type condition introduced by Antipin [2], which can be written as
Indeed, taking \(u=z\) in (3) we obtain (2). On the other hand, (2) implies the Lipschitz-type condition in the sense of Mastroeni [19]
where \(c_1, c_2\) are two given positive constants.
If \(f(x,y) = \left\langle F(x), y-x\right\rangle \) for all \(x,y \in H\), i.e., EP collapses to a VI problem, then f satisfies (2) if F is Lipschitz continuous with a Lipschitz constant \(L > 0\). Indeed, since F is Lipschitz continuous, using the Cauchy–Schwarz inequality, we have
To establish the main results of the paper, we need to recall the stability concepts of an equilibrium point of the general dynamical system
where T is a continuous mapping from H to H and \(x:[0, +\infty [ \rightarrow H, \, t \rightarrow x(t)\).
Definition 2.1
[24]
- (a)
A point \(x^*\in H\) is an equilibrium point for (4) if \(T(x^*)=0\);
- (b)
An equilibrium point \(x^*\) of (4) is stable if, for any \(\epsilon >0\), there exists \(\delta >0\) such that, for every \(x_0 \in B(x^*, \delta ) \), the solution x(t) of the dynamical system with \(x(0)=x_0\) exists and is contained in \(B(x^*, \epsilon )\) for all \(t>0\), where \(B(x^*, r )\) denotes the open ball with center \(x^*\) and radius r;
- (c)
A stable equilibrium point \(x^*\) of (4) is asymptotically stable if there exists \(\delta >0\) such that, for every solution x(t) of (4) with \(x(0) \in B(x^*, \delta )\), one has
$$\begin{aligned} \lim _{t \rightarrow +\infty } x(t)=x^*; \end{aligned}$$ - (d)
An equilibrium point \(x^*\) of (4) is exponentially stable if there exist \(\delta >0\) and constants \(\mu >0\) and \(\eta >0\) such that, for every solution x(t) of (4) with \(x(0) \in B(x^*, \delta )\), one has
$$\begin{aligned} \Vert x(t) -x^* \Vert \le \mu \, \Vert x(0)-x^*\Vert \, e^{- \eta t} \quad \forall t \ge 0. \end{aligned}$$(5)Furthermore, \(x^*\) is globally exponentially stable if (5) holds true for all solutions x(t) of (4).
3 A Fixed Point-Type Dynamical System
For every \(\lambda >0\), we define a function \(\psi _\lambda : C \rightarrow C\) by
Since \(f(x,\cdot )\) is convex, for every \(x \in C\) and \(\lambda >0\), the problem
is a strongly convex problem, hence it has a unique solution. Therefore, the function \(\psi _\lambda \) is well defined and has single values on C. Moreover, if \(x^*\) is a fixed point of function \(\psi _\lambda \) then \(x^* \in \text {Sol}(f,C)\). Indeed, we have
Theorem 3.1
For any \(\lambda > 0\), \(x\in \text {Sol}(f,C)\) if and only if \(x = \psi _\lambda (x)\).
Proof
See e.g., [11].
Remark 3.1
If \(f(x,y) = \left\langle F(x), y-x \right\rangle \) for all \(x,y \in H\) then (6) becomes
where \(P_C\) denotes the projection operator onto C. In this case, Theorem 3.1 reduces to the well-known characterization of the solution of VI(F, C): For any \(\lambda > 0\), x is a solution of VI(F, C) if and only if \(x = P_C (x-\lambda F(x))\), see e.g., [20].
For solving \(\text {EP}(f,C)\), we consider the following dynamical system
where \(\rho , \lambda > 0\).
Remark 3.2
The explicit discretization of dynamical system (8) with respect to the time variable t, with step size \(h_n>0\) and initial point \(x_0 \in C\), yields the following iterative scheme:
or equivalently
which is the relaxed projection-type method for solving \(\text {EP}(f,C)\) with relaxation parameter \(\rho h_n\). The convergence of this method without relaxation, i.e., \(\rho h_n = 1\) for all n, was investigated in [17, 19] when the function f is strongly monotone.
Remark 3.3
If \(f(x,y) = \left\langle F(x), y-x \right\rangle \) for all \(x,y \in H\), then the dynamical system (8) reduces to the projected dynamical system
investigated in [21, 22, 24, 28].
It is known that, if the function f is strongly pseudo-monotone and continuous, then the equilibrium problem \(\text {EP}(f,C)\) has a unique solution \(x^*\), see [32]. It follows from Theorem 3.1 that \(x^*\) is a fixed point of \(\psi _{\lambda }\), i.e., \(x^*\) is the unique equilibrium point of dynamical system (8). Therefore, as a consequence, we have the following existence result.
Corollary 3.1
Suppose that the function f is continuous and strongly pseudo-monotone with modulus \(\gamma >0\) on a nonempty closed convex set C. Then, the dynamical system (8) has a unique equilibrium point, which is the unique solution of \(\text {EP}(f,C)\).
We are now in a position to establish the globally stability of dynamical system (8). For that purpose, we first give an estimation which plays the main role in the study of stability of the dynamical system (8).
Proposition 3.1
Let C be a nonempty closed convex subset of a real Hilbert space H. Let f be a \(\gamma \)-strongly pseudo-monotone function from \(C \times C\) into \(\mathbb {R}\) satisfying the Lipschitz-type condition with modulus \(L>0\). Let \(x^*\) be the unique solution of \(\text {EP}(f,C)\) and \(\lambda > 0\). Then,
Proof
Since f satisfies the Lipschitz-type condition (2), using the Cauchy–Schwarz inequality, we have for all \(x,y,z \in C\) that
Hence, (10) can be deduced from [34, Proposition 4.2]. \(\square \)
We establish now the main result of this section.
Theorem 3.2
Let all the assumptions in Proposition 3.1 be satisfied and let \(\lambda < \frac{2\gamma }{L^2}\). Then, the unique equilibrium solution \(x^*\) of the dynamical system (8) is globally exponentially stable.
Proof
Consider the Lyapunov function
From (8), time derivative of V can be expressed as
Therefore, it follows from Cauchy–Schwarz inequality and (10) that
where
Therefore, for all \(t>0\), we have
This means that the equilibrium solution \(x^*\) of the dynamical system (8) is globally exponentially stable. \(\square \)
Remark 3.4
According to Theorem 3.2, the unique equilibrium point \(x^*\) is globally exponentially stable if parameter \(\lambda \) is small enough. Therefore, it is interesting to study the value of \(\lambda \) which maximizes the convergence rate of the trajectories. Considering \(\alpha \) in (11) as a function of \(\lambda \in \left]0,2\gamma /L^2 \right[\), we can see that the maximum convergence rate of the trajectory x(t) is
which is attained at \(\lambda =\lambda ^*=\gamma /L^2\).
Since any strongly monotone function f is strongly pseudo-monotone, we have directly the following consequence:
Corollary 3.2
Let C be a nonempty closed convex subset of a real Hilbert space H. Let f be a \(\gamma \)-strongly monotone function from \(C \times C\) into \(\mathbb {R}\) satisfying the Lipschitz-type condition with modulus \(L>0\). Let \(x^*\) be the unique solution of \(\text {EP}(f,C)\) and \(\lambda \in \left] 0, \frac{2 \gamma }{L^2}\right[ \). Then, \(x^*\) is globally exponentially stable.
In the following, we prove the linear convergence of a discrete version of the dynamical system (8), i.e., the scheme (9).
Theorem 3.3
Let all the assumptions in Proposition 3.1 be satisfied and let \(\lambda < \frac{2\gamma }{L^2}\). Let \(\left\{ \rho _n\right\} \subset [\underline{\rho }, 1] \) for all \(n\ge 0\) where \(\underline{\rho }>0\) and let \(x_0 \in C\). Then, the sequence \(\left\{ x_n\right\} \) generated by
converges linearly to the unique solution \(x^*\) of \(\text {EP}(f,C)\).
Proof
Denoting \(y_n:= \psi _\lambda (x_n)\) and \(q= \frac{1}{1+\lambda (2 \gamma - \lambda L^2)} \in ]0,1[\), we have from (10) that
Therefore,
This means that the sequence \(\left\{ x_n\right\} \) converges linearly to \(x^*\). \(\square \)
Remark 3.5
In the case \(\rho _n = 1\) for all \(n \ge 0\), (12) reduces to the proximal point algorithm studied by Antipin in [2], where the linear convergence was obtained under strong convexity assumption. The linear convergence of proximal point algorithm for solving strongly pseudo-monotone EPs is established in [34, Theorem 4.4]. A three-step proximal point algorithm can be found in [35, Theorem 3], where the speed of convergence is slower than linearity.
It is known that the over-relaxation may sometimes improve the convergence performance. We give an over-relaxation result in the following Theorem.
Theorem 3.4
Let all the assumptions in Proposition 3.1 be fulfilled and let \(\lambda < \frac{2\gamma }{L^2}\). Let \(\left\{ \rho _n\right\} \subset [1, \overline{\rho }] \) for all \(n\ge 0\), where \(\overline{\rho } < \frac{2}{1+\sqrt{q}}\) and let \(x_0 \in C\). Then, the sequence \(\left\{ x_n\right\} \) generated by
converges linearly to the unique solution \(x^*\) of \(\text {EP}(f,C)\).
Proof
From (13), we have
Hence,
Since \(\overline{\rho } < \frac{2}{1+\sqrt{q}}\), we obtain \(\overline{\rho }(1+\sqrt{q})-1 \in (0,1)\). Therefore, \(\left\{ x_n\right\} \) converges linearly to \(x^*\). \(\square \)
As a consequence of Theorems 3.3 and 3.4, we have that the sequence \(\{x_n\}\) converges linearly to the unique solution of \(\text {EP}(f,C)\) when \(\rho _n \subset [\underline{\rho }, \overline{\rho }]\).
When \(f(x,y) = \left\langle F(x), y-x \right\rangle \) for all \(x,y \in H\), we obtain the relaxed version of the projected gradient method for solving variational inequalities considered in [30].
Corollary 3.3
Let F be Lipschitz continuous with modulus \(L>0\) and strongly pseudo-monotone with modulus \(\gamma > 0\). Let \(\lambda < \frac{2\gamma }{L^2}\) and \(\left\{ \rho _n\right\} \subset [\underline{\rho }, \overline{\rho }] \subset \left]0, \frac{2}{1+\sqrt{q}}\right[ \) for all \(n\ge 0\) and let \(x_0 \in C\). Then, the sequence \(\left\{ x_n\right\} \) generated by
converges linearly to the unique solution \(x^*\) of VI(F, C).
Remark 3.6
When f(x, y) is defined as in (1), the results in Theorem 3.3 and Theorem 3.4 generalize the convergence of proximal point methods for solving saddle point problems studied in [1, 2].
4 Global Error Bounds
In this section, our aim is to establish a global bound for the distance between any arbitrary trajectory x and the solution set of strongly pseudo-monotone EPs. Specially, given an arbitrary trajectory \(x \in C\), we wish to measure how close x is to the unique solution \(x^*\) of the problem \(\text {EP}(f,C)\) and to obtain a bound on such measures in terms of some easily computable quantities depending solely on x and the data of \(\text {EP}(f,C)\).
Theorem 4.1
Let C be a nonempty closed convex subset of a real Hilbert space H. Let f be a \(\gamma \)-strongly pseudo-monotone function from \(C \times C\) into \(\mathbb {R}\) satisfying the Lipschitz-type condition with modulus \(L>0\). Let \(x^*\) be the unique solution of \(\text {EP}(f,C)\) and \(\lambda > 0\). Then, for every arbitrary vector \(x \in C\), it holds that
Proof
For every \(x \in C\), denote by \(z:= \psi _\lambda (x) \in C\), the unique solution of the strongly convex minimization problem (7). The optimality condition associated with (7) implies that there exists \(s \in \partial _2 f(x, z)\) such that
where \(N_{C}(z)\) denotes the normal cone to C at z. Hence, by definition of this cone, we obtain that
On the other hand, since \(s \in \partial _2 f(x, z)\), we have
Combining (14) and (15), we obtain
Substituting \(y:=x^* \in C\) into (16), we obtain
Since \(x^*\) is the unique solution of \(\text {EP}(f,C)\) and \(z \in C\), we have \( f(x^*, z) \ge 0 \) and by the strong pseudo-monotonicity of f
Combining (17) and (18), we obtain
On the other hand, the Lipschitz-type continuity of f gives
which implies
It follows from (19), (20) and the Cauchy–Schwarz inequality that
which implies
Using again the Cauchy–Schwarz inequality, we deduce
which completes the proof. \(\square \)
Remark 4.1
Since the error bound holds globally, it can be used as a stopping condition in the algorithm for solving \(\text {EP}(f,C)\), i.e., one can stop the algorithm when \(\Vert x_n - \psi _\lambda (x_n)\Vert \) is small enough.
When \(f(x,y) = \left\langle F(x), y-x \right\rangle \) for all \(x,y \in C\), we recover the following global error bound for variational inequality as established in [31].
Corollary 4.1
Let F be Lipschitz continuous with modulus \(L>0\) and strongly pseudo-monotone with modulus \(\gamma > 0\). Let \(x^*\) be the unique solution of VI(F, C) and \(\lambda > 0\). Then, for every arbitrary vector \(x \in C\), it holds that
The following result states that the distance from an arbitrary vector x to the solution set of \(\text {EP}(f,C)\) can also be lower bounded by the quantity \(\Vert x- \psi _{\lambda } (x)\Vert \).
Theorem 4.2
Let C be a nonempty closed convex subset of a real Hilbert space H. Let f be a \(\gamma \)-strongly pseudo-monotone function from \(C \times C\) into \(\mathbb {R}\) satisfying the Lipschitz-type condition with modulus \(L>0\). Let \(x^*\) be the unique solution of \(\text {EP}(f,C)\) and \(\lambda > 0\). Then, for every arbitrary vector \(x \in C\), it holds that
Proof
Setting \(z:= \psi _{\lambda }(x) \in C\), it follows from (21) that
Hence,
where we have used the Cauchy–Schwarz inequality in the last estimation. Therefore,
If \(\lambda \le \frac{4 \gamma }{L^2}\) then (22) follows from the last inequality. Otherwise, it is trivial. \(\square \)
When \(f(x,y) = \left\langle F(x), y-x \right\rangle \) for all \(x,y \in C\), we obtain a new result of global error bound for variational inequality.
Corollary 4.2
Let F be Lipschitz continuous with modulus \(L>0\) and strongly pseudo-monotone with modulus \(\gamma > 0\). Let \(x^*\) be the unique solution of VI(F, C) and \(\lambda > 0\). Then, for every arbitrary vector \(x \in C\), it holds that
Remark 4.2
When f(x, y) is defined as in (1), the results in Theorem 4.1 and Theorem 4.2 provide error bounds for the saddle point problems.
5 Numerical Illustrations
In this section, we consider some numerical results to illustrate the global exponential stability of the unique equilibrium point of dynamical system (8). The codes are implemented in MATLAB. The STOP condition is \(\Vert x(t)-\psi _{\lambda }(t)\Vert \le \epsilon \) for all test problems, where \(\epsilon =10^{-5}\).
Problem 1 The bifunction f of the equilibrium problem comes from the Cournot–Nash equilibrium model considered in [10]. It is defined for each \(x,y \in \mathbb {R}^5\), by
where \(r \in \mathbb {R}^5\), and P and Q are two square matrices of order 5 such that \(P-Q\) is symmetric positive definite. It was proved in [10] that the function f is strongly monotone with modulus \(\gamma =\lambda _\mathrm{min}(P-Q)\), the smallest eigenvalue of \(P-Q\) and f satisfies the Lipschitz-type condition with modulus \(L=\Vert P-Q\Vert \). As in [10], in our test, the vector r and the matrices P and Q are chosen as follows:

The constraint set of this problem is defined by
and its solution \(x^*\) is given by
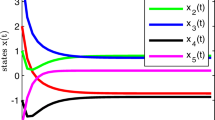
For this problem, \(\gamma =\lambda _{\min }(P-Q)=0.7192\) and \(L=\Vert P-Q\Vert =2.905\), and we choose \(\lambda =1.9 * \gamma /L^2\). Figure 1 displays the trajectories generated by the dynamical system (8). It is clear that x(t) converges exponentially to the unique equilibrium point \(x^{*}\).

The trajectory of dynamical system (8) when \(x_0=(2,1,4,-1,-2)^\mathrm{T}\) and \(\rho =1\)
Figure 2 compares the behavior of the non-relaxed algorithm (\(\rho =1\)) with the inner-relaxed algorithm (\(\rho =0.8\)) and the over-relaxed algorithm (\(\rho =1.2\)) when \(x_0=(2,1,4,-1,-2)^\mathrm{T}\). We can see that the over-relaxed version takes advantage in this example.

Comparison of the non-relaxed algorithm (\(\rho _n=1\)) with the lower-relaxed (\(\rho _n=\rho =0.8\)) and over-relaxed (\(\rho _n=1.2\)) algorithms when \(x_0=(2,1,4,-1,-2)^\mathrm{T}\)
Problem 2 Let f be given as in Example 2.1 with \(\xi (x): = a-\Vert x\Vert \), \(g(x,y) = \left\langle x,y-x \right\rangle \) and
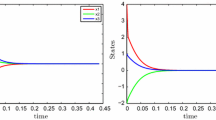
where \(0< a/2< b<a\). We know that f is strongly pseudo-monotone with modulus \(\gamma = a-b >0 \) and not (strongly) monotone. Moreover, f satisfies the Lipschitz-type condition with \(L= a + 2b\) and \(x^*=0\) is the unique solution of \(\text {EP}(f,C)\). Indeed, re-writing \(g(x,y) = \left\langle \xi (x) x, y-x \right\rangle \), it follows from [30] that \(F(x):= \xi (x) x\) is Lipschitz continuous with \(L=a+2b\). Hence, the conclusion follows from (4). In Fig. 3, we present a simulation for Problem 2 where \(H=\mathbb {R}^5\), \(a= 10, b= 6\) and \(\lambda = \gamma /L^2\).

The trajectory of dynamical system (8) when \(x_0=(5,4,3,-1,-3)^\mathrm{T}\) and \(\rho =1\)
Figure 4 compares the behavior of the non-relaxed algorithm (\(\rho =1\)) with the inner-relaxed algorithm (\(\rho =0.8\)) and the over-relaxed algorithm (\(\rho =1.2\)) with a random initial \(x_0\). Again, the over-relaxed version takes advantage in this example.

Comparison of the non-relaxed algorithm (\(\rho _n=1\)) with the lower-relaxed (\(\rho _n=\rho =0.8\)) and over-relaxed (\(\rho _n=1.2\)) algorithms with a random initial \(x_0\)
6 Conclusions
We have proposed and studied a dynamical system for solving equilibrium problems in Hilbert spaces. Under mild conditions, we have established the solution existence and uniqueness as well as the stability of the solution of the equilibrium problem. We have also provided the linear convergence analysis of a discrete version of the proposed dynamical system. Relaxing the strong (pseudo)-monotonicity assumption could be an interesting topic for further research.
References
Antipin, A.S.: Equilibrium programming: proximal methods. Comput. Mat. Math. Phys. 37, 1285–1296 (1997)
Antipin, A.S.: The convergence of proximal methods to fixed points of extremal mappings and estimates of their rate of convergence. Comput. Math. Math. Phys. 35, 539–551 (1995)
Antipin, A.S.: Non-gradient optimization of saddle functions. In: “Problems of Cybernetics. Methods and Algorithms for the Analysis of Large Systems”. Nauchn. Soviet po Probleme “Kibernetika”, Moscow (1987)
Blum, E., Oettli, W.: From optimization and variational inequalities to equilibrium problems. Math. Stud. 63, 123–145 (1994)
Muu, L.D., Oettli, W.: Convergence of an adaptive penalty scheme for finding constraint equilibria. Nonlinear Anal. 18, 1159–1166 (1992)
Antipin, A.S., Budak, B.A., Vasilév, F.P.: Methods for solving equilibrium programming problems. Differ. Equ. 41, 1–9 (2005)
Antipin, A.: Extra-proximal methods for solving two-person nonzero-sum games. Math. Program. Ser. B 120, 147–177 (2009)
Bigi, G., Castellani, M., Pappalardo, M., Passacantando, M.: Nonlinear Programming Techniques for Equilibria. Springer, Berlin (2019)
Hung, P.G., Muu, L.D.: The Tikhonov regularization extended to equilibrium problems involving pseudomonotone bifunctions. Nonlinear Anal. Theory Methods Appl. 74, 6121–6129 (2011)
Quoc, T.D., Muu, L.D.: Iterative methods for solving monotone equilibrium problems via dual gap functions. Comput. Optim. Appl. 51, 709–728 (2012)
Quoc, T.D., Muu, L.D., Nguyen, V.H.: Extragradient methods extended to equilibrium problems. Optimization 57, 749–776 (2008)
El Farouk, N.: Pseudomonotone variational inequalities: convergence of the auxiliary problem method. J. Optim. Theory Appl. 111, 305–326 (2001)
Moudafi, A.: Proximal point methods extended to equilibrium problems. J. Nat. Geom. 15, 91–100 (1999)
Kim, J.K., Anh, P.N., Hyun, H.G.: A proximal point-type algorithm for pseudomonotone equilibrium problems. Bull. Korean Math. Soc. 49, 749–759 (2012)
Strodiot, J.J., Vuong, P.T., Van, N.T.T.: A class of shrinking projection extragradient methods for solving non-monotone equilibrium problems in Hilbert spaces. J. Glob. Optim. 61, 159–178 (2016)
Vuong, P.T., Strodiot, J.J.: The Glowinski–Le Tallec splitting method revisited in the framework of equilibrium problems in Hilbert spaces. J. Glob. Optim. 70, 477–495 (2018)
Muu, L.D., Quoc, T.D.: Regularization algorithms for solving monotone Ky Fan inequalities with application to a Nash-Cournot equilibrium model. J. Optim. Theory Appl. 142, 185–204 (2009)
Chadli, O., Chbani, Z., Riahi, H.: Equilibrium problems with generalized monotone bifunctions and applications to variational inequalities. J. Optim. Theory Appl. 105, 299–323 (2000)
Mastroeni, G.: On auxiliary principle for equilibrium problems. In: Daniele, P., et al. (eds.) Equilibrium Problems and Variational Models, pp. 289–298. Kluwer Academic Publishers, Dordrecht (2003)
Facchinei, F., Pang, J.-S.: Finite-Dimensional Variational Inequalities and Complementarity Problems, vol. I and II. Springer, New York (2003)
Ha, N.T.T., Strodiot, J.J., Vuong, P.T.: On the global exponential stability of a projected dynamical system for strongly pseudomonotone variational inequalities. Opt. Lett. 12, 1625–1638 (2018)
Hu, X., Wang, J.: Global stability of a recurrent neural network for solving pseudomonotone variational inequalities. In: Proceedings of the IEEE International Symposium on Circuits and Systems, Island of Kos, Greece, May 21–24, pp. 755–758 (2006)
Nagurney, A., Zhang, D.: Projected Dynamical Systems and Variational Inequalities with Applications. Kluwer Academic, Dordrecht (1996)
Pappalardo, M., Passacantando, M.: Stability for equilibrium problems: from variational inequalities to dynamical systems. J. Optim. Theory Appl. 113, 567–582 (2002)
Vuong, P.T.: The global exponential stability of a dynamical system for solving variational inequalities. Netw. Spatial Econ. (2019). https://doi.org/10.1007/s11067-019-09457-6
Boţ, R.I., Csetnek, E.R.: A dynamical system associated with the fixed points set of a nonexpansive operator. J. Dyn. Differ. Equ. 29, 155–168 (2017)
Boţ, R.I., Csetnek, E.R., Vuong, P.T.: The Forward-Backward-Forward Method from continuous and discrete perspective for pseudo-monotone variational inequalities in Hilbert Spaces. Eur. J. Oper. Res. (2020). https://doi.org/10.1016/j.ejor.2020.04.035
Cavazzuti, E., Pappalardo, M., Passacantando, M.: Nash equilibria, variational inequalities, and dynamical systems. J. Optim. Theory Appl. 114, 491–506 (2002)
Chbani, Z., Riahi, H.: Existence and asymptotic behaviour for solutions of dynamical equilibrium systems. Evol. Equ. Control Theory 3, 1–14 (2014)
Khanh, P.D., Vuong, P.T.: Modified projection method for strongly pseudomonotone variational inequalities. J. Glob. Optim. 58, 341–350 (2014)
Kim, D.S., Vuong, P.T., Khanh, P.D.: Qualitative properties of strongly pseudomonotone variational inequalities. Opt. Lett. 10, 1669–1679 (2016)
Muu, L.D., Quy, N.V.: On existence and solution methods for strongly pseudomonotone equilibrium problems. Vietnam J. Math. 43, 229–238 (2015)
Karamardian, S., Schaible, S.: Seven kinds of monotone maps. J. Optim. Theory Appl. 66, 37–46 (1990)
Duc, P.M., Muu, L.D., Quy, N.V.: Solution-existence and algorithms with their convergence rate for strongly pseudomonotone equilibrium problems. Pac. J. Optim. 12, 833–845 (2016)
Anh, P.N., Hieu, D.V.: Multi-step algorithms for solving EPs. Math. Model. Anal. 23, 453–472 (2018)
Acknowledgements
The authors are very thankful to both referees for their careful reading and constructive comments, which helped improving the presentation of the paper. This research was carried out when the first author was working at the Institute for Research and Applications of Optimization (VinOptima), Vingroup. Support provided by VinOptima is gratefully acknowledged.
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Hedy Attouch.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Vuong, P.T., Strodiot, J.J. A Dynamical System for Strongly Pseudo-monotone Equilibrium Problems. J Optim Theory Appl 185, 767–784 (2020). https://doi.org/10.1007/s10957-020-01669-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10957-020-01669-y
Keywords
- Equilibrium problem
- Dynamical system
- Strong pseudo-monotonicity
- Global exponential stability
- Error bound