
Abstract
The central part of the Pannonian Basin is characterised by low to medium seismicity. North central Hungary is one of the most dangerous areas of the country in terms of earthquakes, which also includes the area of the Mór Graben where some of the largest earthquakes occurred in Hungary’s history. Recent activity has been observed in the Mór Graben. It has been established that earthquake swarms occur quite frequently in the graben. To further study these events, we deployed a temporary seismic network that operated for 20 months. Using the temporary network stations as well as permanent stations from the Kövesligethy Radó Seismological Observatory and the GeoRisk Ltd. networks we registered 102 events of small magnitudes. In this paper, we demonstrate and compare three different event detection methods based on the registered waveforms by the permanent and temporary stations to find the optimal one to collect a complete swarm list in the Mór Graben. After the hierarchical cluster analysis, we relocated the hypocentres using a multiple-event algorithm. Our results demonstrate that the most successful detector in this case is the “Subspace detector.” We managed to create a complete list of the events. Our results indicate that the Mór Graben is still seismically active.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The Pannonian Basin is located in the southeast part of Central Europe. A large part of the basin belongs to Hungary but it also extends to Croatia, Slovakia, Ukraine, Romania, Serbia, and Austria. It is located in a transition zone from the point of view of seismicity: between the quiet/aseismic East European platform and the seismically active Mediterranean Sea.
The basin and the surrounding orogens (i.e. Carpathians, Dinarides, and Alps) represent a geologically very complex area with a heterogeneous crustal and lithospheric structure (Schmid et al. 2008; Horváth et al. 2015; Kalmár et al. 2021). The Pannonian Basin is an ~ 20-Ma-year-old extensional back-arc basin (Horváth et al. 2006) that was formed due to the convergence of the Adriatic and European plates above a subduction zone which was rolling back north-eastward, towards the stable East European platform (Tari et al. 1999; Nemčok et al. 1998; Fodor et al. 1999; Schmid et al. 2008; Balázs et al. 2016). The extension of the basin was completed in the early Late Miocene (e.g. ~ 9 Ma ago) (i.e. Balázs et al. 2016) and recently a structural inversion is ongoing (Horváth and Cloetingh 1996; Fodor et al. 2005; Bada et al. 2007; Ustaszewski et al. 2014). The majority of the recent seismic activity is caused by the northward motion and counter clockwise rotation of the Adriatic microplate (Tomljenovic and Csontos 2001; Grenerczy et al. 2005; Vrabec and Fodor 2006; Handy et al. 2010, Xiong et al., 2020). The stress field can be described as compressional or transpressional (Békési et al. 2023) with the paucity of extensional areas whilst the kinematics of neotectonic or active faults is mostly strike-slip character, with predominantly sinistral slip (Tóth et al. 2002; Wéber 2016; 2018; Koroknai et al. 2020).
The seismic activity of the basin is moderate intraplate. In the study area, the focal depths are primarily located in the upper part of the crust (5–10 km) (Bondár et al. 2018; Czecze and Bondár 2019). Based on focal mechanism solutions, thrust and strike-slip faulting are dominant, but normal faulting also occurs in the area (Wéber 2018; Wéber et al. 2020). According to statistical analysis, the occurrence of a magnitude 6 earthquake is about once in a hundred years and four to five earthquakes with a magnitude of 2.5 to 3.5 are expected annually in Hungary (Tóth et al. 2002). In terms of seismic hazards, one of the most critical areas is a N-S trending belt from Lake Balaton to the Danube River, the Berhida-Mór-Komárom high-risk zone (Varga et al. 2021), where 4 major earthquakes occurred in the last 300 years (Szeidovitz 1990; Varga et al. 2021). The studied area, the Mór Graben, is part of this seismically active zone at the south-western margin of the slightly elevated Vértes Hills.
One of the largest historical earthquake in Hungary occurred near the village of Mór in 14 January 1810 (Fig. 1) with an intensity of 8 and a local magnitude of 5.4 with a focal depth of 18 ± 5 km (Szeidovitz 1990; Varga et al. 2021). The event caused heavy damage to the buildings in the area and was felt even 260 km from the epicentre (Kitaibel and Tomcsányi 1814). In 2011, another significant event occurred 15 km to the north, near Oroszlány town with a magnitude of 4.5 (Wéber and Süle 2014) followed by more than 200 aftershocks four of them exceeded the magnitude of 2.0 (Békési et al. 2017). The Hungarian Earthquake Catalogue (Zsíros etal., 1988; Zsíros, 2000) collected almost 400 historical and instrumentally recorded events in the Vértes Hills.

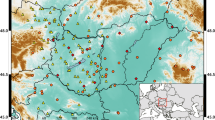
Seismicity and faults of the region between years 1990 and 2021. Yellow triangles indicate the permanent and temporary seismological stations. Faults were classified by age superimposed on topography (digital terrain model) of the southern Vértes Hills. Letters A–D refer to Fig. 2. Note indices of neotectonic deformation (after Fodor 2008; Fodor et al. 2008a)
In this part of the country, the anthropogenic seismicity is high (up to 50% of the total events) due to the mines and quarry blasts; thus, the elimination of the non-naturally occurring events is critical to obtain the real seismic activity of the area (Kiszely 2009; Kiszely et al. 2021; Czanik et al. 2021; Bondár et al. 2021, 2022). The Csókakő (CSKK) station is one of the most important seismological stations for identifying and separating local earthquakes and mine explosions. The CSKK station registered small earthquakes in the Mór Graben from time to time, and former studies have recognised that these events are part of an earthquake swarm(s) in recent years. We only had one permanent station operated by KRSO in the Mór Graben. Due to the unfavourable station geometry and for better monitoring, we installed temporary stations in the Mór Graben; the 3 new stations registered the events (concentrate on earthquake swarms) with greater precision between 26.03.2020 and 10.01.2022.
In this study we demonstrate that with these new temporary stations, we were able to register and relocate a large number of new events with multiple event relocation methods. New observations show that earthquakes occurred in different swarms. Since previously we could only register major events in the area with large uncertainty of the epicentral area, the new local network and relocation procedure demonstrated that parts of the earthquakes are spatially strongly connected to the Mór Fault. Thus, fault became the seismologically best constrained active fault of the Pannonian Basin. Two other swarms can indicate the recent activity of two other faults of the eastern and western Vértes Hills..
2 Geological setting and potential neotectonic structures of the Vértes Hills
The Vértes Hills are composed of Mesozoic carbonates which were slightly folded during the Cretaceous Alpine orogeny. Middle Eocene to Oligocene clastic-carbonatic cover represents a small part of a large contractional basin (Tari et al. 1993) marked locally by strike-slip faults (Kercsmár et al. 2006). The late Early to early Late Miocene rifting (approximately from 18 to 10 Ma) produced several new or reactivated fault sets (Fig. 2) (Fodor 2008; Fodor et al. 2008a). The post-rift sedimentary sequence once covered the whole Vértes Hills (Csillag et al. 2008) and produced new fault sets with mostly N-S to NE-SW strike (Fodor et al. 1999). The location of faults was determined by surface mapping in the outcropping part of the Vértes Hills (Taeger 1909; Fodor et al. 2008a). However, in their foothills covered by thin Quaternary, most of the faults were established or only postulated on the basis of borehole data, combined with morphological observations and geophysical data (Fodor 2008; Fodor et al. 2008a).
The Mór Fault bounding the Mór Graben on its north-eastern side is a segmented fault zone, which is expressed in the morphology as a steep slope of 100–250 m in height (Fig. 2A). Along its surface occurrence, the fault has a NW–SE strike which only locally changes to WNW-ESE in the central part near Csókakő. Here the fault zone is exposed and contains two parallel planes bounding a slice of Jurassic rocks between the Triassic footwall and Oligocene hanging wall (Fig. 2B). The fault was born in the Cretaceous (Fodor and Kövér 2013) and few fault segments parallel to the range-bounding fault scarp remained inactive later (Fig. 1, green faults). Based on borehole and seismic reflection data, the total Cenozoic displacement of the Mór Fault can reach 1000–1200 m. The fault was reactivated in the Oligocene and during the rifting phase of the Pannonian Basin, and gradually changed its kinematics during these stages from normal to normal-dextral fault (Fodor 2008; Fodor and Kövér 2013). The Mór Fault splays off to several N-S to NE-SW striking branches just at the northern tip of the fault scarp north of Mór, where the small Által-ér (Által creek) crosses the fault. The splays with NE-trend are named here as Pusztavám Fault (Fig. 1).
Recent studies tried to establish the network of neotectonic faults in the Vértes Hills. The works postulated the reactivation of inherited older faults during the inversion (neotectonic) phase starting from approximately 6 Ma. These postulations used indirect geological evidences: diverted creeks, tilted morphological surfaces, tectonically induced dewatering and soil creep structures, slump folds, and fractured pebbles (Fig. 2C, D) (Fodor et al. 2005; 2008a;b; Fodor and Kövér 2013). The important regional seismic activity (Kiszely 2008) was also used as indirect evidence of recent fault movements (Fodor et al. 2008b) but the connection of earthquakes and potentially active faults remained very approximative due to unprecise epicentre locations.

Deformation features in the southern Vértes Hills. A Morphological expression of the scarp of the Mór Fault. Note the location of the fault plane. B Field photo showing two planes of the Mór fault near Csókakő (Fodor and Kövér 2013). Note the change in strike near the castle. C and D Sediment deformation features potentially related to neotectonic motions (see discussion in chapter 8; after Fodor 2008). C Pleistocene gravel and sand layers became folded due to eastward tilt towards the Pusztavám Fault. Inset shows a fractured pebble (photo of A. Tokarski). D Folds in silty clay layers between sandy, gravelly fluvial deposits of 98–100 kyr (Thamó-Bozsó et al. 2010)
3 Seismological stations
One of the permanent stations of the Hungarian National Seismological Network is located in the Mór Graben; at Csókakő (CSKK), it was deployed in 2009. In the region, two stations of the Paks microseismic monitoring network (Tóth et al., 2021) are operated since 2002 (PKSG) and 2007 (PKST). Unfortunately, these three stations are lying almost in one line; hence, the location errors of the seismic events detected only by these stations are generally huge (Bondár et al. 2004).
In 2015, during the AlpArray project (Hetényi et al. 2018; Gráczer et al. 2018) two temporary seismological stations were deployed ~ 30 km from CSKK (A268A and A269A, renamed to HU08A and HU09A in 2019, respectively; Fig. 3.). However, these stations cannot detect the low-magnitude earthquake swarms in the Mór Graben.

Seismological stations of the study area. The size of the triangles indicates the number of picked P and S arrival times
In 2020, KRSO installed three stations (MSW1, MSW2, MSW3; Fig. 3) in the study area to monitor the local seismicity. During the site selection, the main criteria were to create a network surrounding the Mór Graben and to keep the distances around 10 km from CSKK regarding the low magnitude of the events. Below the stations, the Mesozoic carbonate sequence is covered by thin Cenozoic sediments, except MSW3, where a thick clastic sequence of Oligocene age forms the upper layer and is at the surface. We used the CSKK and the three temporary stations to investigate the swarms, because the signal-to-noise ratio was mostly good on these. However, due to the small magnitude of the events and the complex local geological conditions (Budai et al. 2008; Fodor et al. 2008a, b), we paid a lot of attention to the pre-processing of the waveforms.
4 Swarms in the Mór Graben
An earthquake swarm is a sequence of local earthquakes within a relatively small time interval. The period of time can be days, months, or years. In the case of a swarm, there is no mainshock; the energy release is different from an aftershock sequence (Horálek et al. 2015). Swarms may be known from volcanic regions (Iceland, Japan), where these swarm events occur before or after volcanic activity, but there are many examples in the literature far from tectonic boundaries (Mogi 1989; Thouvenot et al. 2016; Lemoine et al. 2020).
During the operation (approximately 20 months) of the Mór Graben temporary stations, 102 naturally occurring earthquakes were recorded. In all cases, the event magnitude was less than 2.5, and we can see that the magnitude of the vast majority of swarms is between 0.1 and 1.0 (Fig. 4). Without the temporary stations, we would have been able to detect only 18% of the events.

Magnitude distribution of the earthquakes recorded by the Mór Graben network (MSW) between 26.03.2020 and 10.01.2022
In order to select the swarm(s) from the set of other events (e.g. lonely earthquakes, explosions), we performed exact event location and clustering before the three independent waveform processing procedures for the most accurate analysis possible.
5 Waveform cross-correlation and clustering
Seismic events in an earthquake swarm produce similar waveforms, but different swarms are not necessarily similar. We investigated the waveforms of the detected events by applying the waveform cross-correlation technique for two reasons: first, the cross-correlation measurements can reduce phase picking errors at least by an order of magnitude — thus, we obtained high-quality data for the multiple event relocation (Waldhauser and Ellsworth 2000). Second, we could quantify the similarity between the events, and identify different event clusters — different swarms. Two earthquakes have similar waveforms if their phases travel along similar ray paths (they are close to each other), and the source mechanisms are the same (Schaff and Waldhauser 2005). We used waveforms from close stations as the events have small magnitudes — more distant stations produced noise correlations in this case. According to the signal-to-noise spectra, we applied the Butterworth filter (1–10 Hz) before the correlation. We performed cross-correlation between earthquake pairs at each station — after rotation, on the vertical, radial, and transversal components of the seismograms; thus, we collected P- and S-differential times on every station and event pair. The window of the correlation was determined using predicted travel times with the local 1-D velocity model (Gráczer and Wéber 2012). We used the 0.6 correlation threshold of the three channels and removed the noise-to-noise correlations. We obtained the SV, SH, and P correlation matrices at the temporary stations.
Then, we applied hierarchical cluster analysis to divide these events into smaller swarm clusters. We defined the similarity between the earthquakes by the correlation coefficient. The different swarms are defined by cutting branches off the dendrogram (Fig. 5). In this case, the constant cut-off value would not have been appropriate; thus, we used different values. Based on the dendrogram and the correlation matrices we identified 6 different earthquake swarms. Appendix 1 shows well-separated swarms on the correlation matrix of first-arriving P waveforms at MSW1 temporary station. Events are ordered by their nearest-neighbour distance from the single-linkage cluster analysis (Figs. 6, 7 and 8).

Dendrogram based on the correlation coefficients of first-arriving P waveforms at the MSW1 station. The colours indicate swarm clusters. We identified 6 different earthquake swarm clusters based on waveform correlation and correlation matrices

A Location of earthquake epicentres registered by the Mór Graben temporary network, comparison of iLoc (yellow dots) and hypoDD (dark brown dots) solutions. The double-difference algorithm significantly tightens the event cluster. Inset map shows the smaller area of the CSKK station. B HypoDD location of swarm clusters registered by the Mór Graben temporary network: each colour indicates event clusters. The high event density areas are marked as concentric circles. The grey ellipses represent the iLoc error ellipses of the master events

Example of the correlation coefficient values with the master event of SW2 for successive 5-s-long time segments on May 7, 2020 (86,400 s). The critical correlation coefficient was given 0.6

Manually identified events (black traces) and those identified only by the subspace detector (green traces) in the SW2 group at MSW1 station (Z comp.). Left picture was normalised by the global maximum amplitude of the swarm and the right was normalised at individual traces. The subspace detector is able to detect events that cannot be seen by the naked eye
The resulting clusters not only present similarities in waveform, but also show spatial separation in a map projection (Fig. 9A). The clusters are separated from each other in space, with each cluster representing a distinct swarm. If we investigate the temporal activity, it can also be seen that these swarms are separated from each other not only in space, but also in time. The table containing the master events also shows dates; all other swarms belonging to the cluster are closely related to the time of the master events.

A Final swarm clusters based on hierarchical cluster analysis: each colour indicates event clusters. The high event density areas are marked as concentric circles. B Structural model for the neotectonic phase in the Vértess Hills and surroundings. Note active faults with newly identified swarms, faults with potential neotectonic activity, and other geological and morphological indices for Plio-Quaternary fault activity. Stereonet depicts data for the last fault-slip phase near the earthquake swarms; location is marked by a star (Kóta 2001; Fodor 2008). Schmidt net, lower hemisphere projection
6 Event locations and master event selection
In the Hungarian National Seismological Bulletin (Süle et al., 2022), the event parameters are calculated with the iLoc single event location algorithm (Bondár and Storchak 2011), with the RSTT 3D velocity model (Myers et al. 2010; Begnaud et al. 2021). The iLoc locator uses an a priori estimate of the data covariance matrix to account for correlated model errors.
Using single-event locators it is difficult to identify phase picking or phase identification errors, and the path effects due to the unmodeled structures can lead to location bias. Using multiple event location algorithms the location errors and biases can be reduced significantly. We applied the double-difference algorithm (Waldhauser and Ellsworth 2000) to simultaneously relocate the whole cluster. The multiple event location methods are relative methods as they can only give relative locations to each other, and it requires high-quality initial locations. We used the iLoc locations as initial locations for the double-difference algorithm. Using this method, we can use not only the absolute travel times but also the differential times from waveform cross-correlation, so we have significantly increased the amount of high-quality data. The differential time between the waveforms is the time shift which maximises the correlation function, and it carries information about the spatial distance of the event pairs. We accepted correlations if the correlation coefficient was at least 0.6. Although these earthquakes were recorded by only a few stations, we had a sufficient amount of data for reliable location determination.
We applied the double-difference algorithm with the combined dataset, and during the iterations, with the hypoDD (Waldhauser 2001) we used different weights in the case of catalogue and cross-correlation data. The interactions continued until the convergence criteria were met, until the change in the hypocentre parameters was sufficiently small.
During the iterations of the relocations, few events weakly connected to the cluster could lose their connection or became airquakes (negative depth) so they were excluded from further analysis. Since the location of these events is uncertain, we did not fix them to a default depth. Only the stable solutions remained in the dataset, so we were able to determine 72 hypocentres of the 102 earthquakes with the multiple-event algorithm. All of the earthquakes occurred at a shallow depth in the upper crust, with focal depths between 3 and 5 km.
Figure 6 shows a comparison of the iLoc and hypoDD locations. Since the stations were located in the immediate vicinity of the earthquakes and completely surrounded them, the double-difference method significantly improved not only the relative but also the absolute location determinations. The average initial hypocentral depths were 3.1 km, whilst the average relocated hypocentral depths are 4.6 km. The methods and models are in a good agreement that the earthquakes originated in the upper part of the crust.
The next part of this study requires master events. Taking into account the signal-to-noise ratios on the waveforms, the clusters by the hierarchical cluster analysis, and the relocation process, we selected 6 events as master events of the 6 six different clusters (Table 1).
Figure 6B illustrates the error ellipses of the selected master event’s iLoc initial locations. It is noticeable that the ellipses vary in size. All clustered and relocated events are located well within their ellipses, as anticipated.
7 Results of the swarm detection
The events registered by the Mór Graben network have small magnitude, only about 20% of the earthquakes were greater than the local magnitude of 1.0, and the largest was only the local magnitude of 2.4. Therefore, we suspected that the earthquake swarms also contain additional events that are not or barely visible to the analyst on the waveforms. Earthquake swarms are characterised by a very similar waveform and short duration. In our case, about half of the earthquakes quickly followed the previous one within a day, and the earthquake swarms lasted only 2 or 3 days. Comparing different correlation methods is necessary. The events studied in this paper are very short (2–4 s) and occur very close to the stations (sometimes directly beneath them). This means that even for nearby events, local effects can result in different seismograms. In this chapter, we present the different detection methods that we used in order to identify swarms that were not seen by the analyst. We compare our results and select the most effective detector in this case.
Extracting earthquake signals from seismic data is a critical and challenging problem in seismology. The waveforms of swarms can be very weak; these are difficult to recognise by analysts in a noisy background. In addition, their occurrence is irregular and can last for a longer period of time. The elements of swarms typically originate at neighbouring locations and generate similar waveforms. This knowledge is used in the following methods.
7.1 The Fingerprint And Similarity Thresholding algorithm
The Fingerprint And Similarity Thresholding (FAST) is a new similarity-based earthquake detection method that we tested to find smaller elements of swarms that occurred (Yoon et al. 2015; Bergen et al. 2016; Bergen and Beroza 2018; Yoon et al. 2019). The input of this algorithm is continuous time series data from seismic stations and does not rely on lists of known events. FAST uses a pattern mining approach to detect earthquake signals without template waveforms. The process has two key components: build compact binary features called “fingerprints” originating on time–frequency information from segment spectrograms and query the database to identify similar waveforms. The algorithm treats each segment of the input waveform data as a “template” for a potential earthquake and checks pairs of short time windows from all possible times in the continuous data search for similar small earthquakes missing from earthquake catalogues. FAST will not detect an earthquake that occurs only once and is not similar enough to any other earthquakes in the given continuous data set.
We tested the FAST separately for each station, including all three components together (Z, N, E). We applied a 1–10-Hz bandpass filter corresponding to the predominant frequencies of seismic waves for small local earthquakes. Appendix 2 contains the main parameters we used for FAST. The detection results were a time window sequence index with the similarity value over all event pairs containing this event. Events were defined as contiguous time intervals during which detections were observed at this station and labelled according to the initial time of the interval with maximal similarity values.
We checked the time windows that received the most similarity values, to see if they were really earthquakes. The FAST successfully found the elements of swarms at the various stations in the following percentages: CSKK 53%, MSW1 65%, MSW2 21%, and MSW3 18%. The number of false detections was high about 30% because we have used relatively long 24-h records to find similar pairs of waveforms to identify weak earthquake signals. Due to the repeated noisy periods that occurred in 1 day, noise was correlated with noise and was found by the FAST algorithm as a similar event. The station located closest to the earthquakes was the most successful in finding the smaller elements of the swarm.
7.2 Correlation detector
We tested the applicability of the correlation detector (CD) method over our data streams. This method uses a selected waveform template “master event” and calculates cross-correlations with successive filtered time segments. The segments of the continuous data stream which exceed a high degree of similarity to the master event waveform will consider the member of the swarm (Fig. 7). The closely spaced seismic events generate similar signals (Geller and Mueller 1980). The waveform correlation is capable detects of low-magnitude seismic events that have occurred in the near vicinity of a seismic disturbance for which master waveforms exist. Such a procedure is referred to as a matched filter or a matched signal detector. The master events — which are previously detected seismic events — were extracted for each swarm and station separately and cross-correlated with the filtered data from the time series. We applied a 1–10-Hz bandpass filter, and 5-s windows were correlated, and the critical correlation coefficient was given 0.6. The CD successfully found the elements of swarms at the various stations in the following percentages: CSKK 65%, MSW1 65%, MSW2 45%, and MSW3 33%. This method already works better than the FAST method in this case; it managed to detect more new events, but it found very few events that can be seen with the naked eye.
The disadvantage of the CD method is that it only found those tremors that were similar to the master event. CD cannot handle events that are too close to each other in time or overlapping (i.e. doublets) events.
7.3 Subspace detector
Finally, we used the subspace detector (SD) (Harris 2006) for the most detailed investigation of the entire data system. Compared to the other two correlation methods, the SD is the best choice for repeating events (e.g. earthquake swarms), because it uses several master events at the same time (Harris and Dodge 2011; Hicks et al. 2019; Bocchini et al. 2020). Using a linear combination of the selected master events (6 in this study), it is able to find new small, invisible (of the analyst) events on the waveforms of the investigated time window (Skoumal et al. 2016). We used the EQcorrscan python program package in this study (Chamberlain et al. 2018), and we modified the frame and input parameters of the SD source code, in order to make it work perfectly for our data system (Gibbons 2021). In this case, our data system and waveform filtering parameters were the same as described above. We scanned each day separately with the SD, and thus, we were able to check the arrival time of the new detection(s) day by day. In addition to the frequency of the waveform filtering, the other very important parameter in the case of the SD is the correlation detection threshold (Harris 2006; Skoumal et al. 2016). We use low (0.3) correlation thresholds; this is not implicated in false detection if the template of the waveforms is properly prepared (eliminate background noise and useful signal amplification) for the analysis (Gibbons and Ringdal 2006; Schaff 2008; Harris and Dodge 2011). This is supported by Fig. 8, where we can see the extra events that the detector found compared to the previous two methods. Based on these, it can be unequivocally stated that the SD is the best method amongst the ones we investigated for finding small repeating events. Of course, it is very important to appropriate installation and location of the stations in order to be able to use these detectors reliably (Maceira et al. 2010). We can see in Table 2 that the subspace detector found an additional event for each cluster.
Figure 9A shows the relocated event clusters based on hierarchical cluster analysis. The clusters are well-separated, and the two largest clusters (Cluster 1 and Cluster 2) are located in the immediate vicinity of the Mór Fault. The outlier events are dispersed in the area. Figure 9A also shows the nearest focal mechanism solutions (Wéber and Süle 2014; Wéber 2016).
8 Discussion: earthquake swarms and late Quaternary to recent fault activity of the Vértes Hills
8.1 Recent activity of faults near the Mór graben based on newly identified swarms
The distribution of historic earthquakes and the data of the general observation network depict a large area around Mór where the locations of the earthquakes can be suggested. This area is large enough to encompass several faults which potentially had neotectonic activity based on geological data (Fig. 1). Particularly the faults parallel to the Mór Fault and located of its south-western hanging wall block fall within the area of registered seismicity. The debranching fault splays at the northern Mór Fault (including the Pusztavám Fault) could be suspected with recent activity. Based only on the pre-existing earthquake data sets the active faults cannot be selected.
The new improved locations of the swarms can be compared to map view of the faults suggested to have neotectonic activity (Figs. 1 and 9B). Along this segment, the fault location is very well constrained by its surface expression. The dip is less constrained in the surface, but fault-slip data may suggest moderate dip of 50–65°, particularly along the middle part of the fault, where two parallel fault planes were exposed (Fig. 2B). The swarms 1 and 2 and few events of the swarm 6 clearly fall on the Mór Fault. The location of the swarm 1 is on the main fault trace; thus, it may suggest a steep fault. Alternatively, the swarm is connected to the parallel fault in the footwall which was not moving since the Cretaceous. The swarms 2 and 6 are on the south-western hanging wall of the Mór Fault. Taking into account the horizontal distance of 0.7–1.4 km of epicentres from the fault, and the 3–5-km depth of hypocentres, the fault plane could have 70–75° dip degree, slightly steeper than the measured surface dip of 50–65°. Thus, we can conclude that these swarms are on the subsurface continuation of the fault scarp and the swarm locations undoubtedly demonstrate that the Mór Fault is active. We can also speculate that the historical earthquake can be connected to this same fault. Thus, the Mór Fault becomes the seismologically best documented active fault in the Hungarian part of the Pannonian Basin.
The swarm 4 is scattered, the swarm 3 is located along the eastern marginal faults of the Vértes Hills (Eastern Vértes Fault Zone) (Fig. 9B). This parallel fault system was formed during the late Middle to early Late Miocene (12–10 Ma) as demonstrated by the facies distribution of the Late Miocene basin fill of the Csákvár-Zámoly Basin and cross sections (Fig. 1) (Csillag et al. 2004; Fodor 2008). Neotectonic activity was suggested by Fodor et al. (2005) only on the basis of the important distributed seismicity. The newly identified swarm 3 suggest that in fact one branch of the fault zone, most probably the range-bounding fault is active (Fig. 9B).
The swarm 5 is distinct from the location of swarms 1, 2, and 6 and is positioned at the boundary of the Mór Graben and of the Bakony Hills (Fig. 9B). The lack of new map, knowledge on precise location of faults, and neotectonic study hamper the identification of the active fault. Part of the events of the swarm 6 is located along the two branches of the Pusztavám Fault. Although the distinction between the two postulated fault planes cannot be made, the recent activity of the fault is strongly supported (Fig. 9B).
8.2 Other indices of neotectonic fault activity and the neotectonic model of the area
The Mór Fault probably induced a slight tilt of its south-western hanging wall block to NE. One of the consequences could be the deformation of Quaternary deposits (Fig. 2D) (Fodor et al. 2008b; Csillag et al. 2008). The folds directly related to dewatering or solifluction could be induced by this surface tilt. The tilt might have also induced the diversion of the upper reach of the Által creek from its original south-easterly flow towards the north-east, across the Mór Fault (Fig. 9B). Tilt of Quaternary denudation surface also occur at this creek diversion, amongst the splaying termination of the north-western part of the MF (Fodor et al. 2008a, b).
Fractured pebbles and deformed (folded) gravel layers were observed within these tilted surfaces, just between the terminal splays of the Mór Fault. Although the folding could also be associated with periglacial solifluction on the tilted surface, the fractured pebbles can reflect the effect of seismic waves across water-saturated sediments (Fodor et al. 2008b). The tilting itself is oriented towards the Pusztavám Fault which seems to be seismically active.
The geometric characteristics of the 2011 ML 4.5 Oroszlány earthquake was studied in detail (Békési 2016; Békési et al. 2017). They concluded that the source of the evens is either a fault striking N-S or one with E-W strike; the former seems to be more probable. The geological map shows two NNW-trending faults with pre- or syn-rift slip. Taking into the easterly dip of the western fault (western margin of the Majk Graben), this seems to be the source of the events (Fig. 9B) (Békési et al. 2017). However, the NE-SW compressional stress axis could permit a sinistral slip of the important E-W striking Gesztes Fault which accumulated 1.2-km dextral separation during the pre-rift phase (Gyalog 1992; Fodor 2008). In fact, the fault interacts with Late Miocene formations at its eastern termination and NE trending fractures (faults and Plio-Quaternary breccia zones) are conform with neotectonic sinistral slip (Fig. 9B).
The entire Eastern Vértes Fault Zone was formed in the 12–10-Ma time span during the post-rift phase. As we discussed in the previous chapter, the western branch seems to be seismically active. At the very southern termination, fractured pebbles were observed in Late Pleistocene sediments of 48–50 kyr (Fig. 9B) (Fodor et al. 2008b; Thamó-Bozsó et al. 2010). The southernmost segment of the parallel Gánt Fault also shows geomorphologic indices akin to Quaternary deformation. The formerly continuous drainage elements are separated across the fault whilst fluvial deposits were captured in considerable thickness in the western hanging wall block (Fig. 9B) (Fodor and Kövér 2013). In the northern margin of the Csákvár-Zámoly Basin, the Csaplár Fault can also be considered as neotectonically active whilst Fodor et al. (2005) demonstrated displaced Quaternary morphological features, diverted drainages (Fig. 9B).
8.3 Neotectonic stress field and kinematics of the active and neotectonic faults
Kinematics of the Mór Fault changed though time (Kóta 2001; Fodor 2008). Direct fault-slip data along the central segment (near Csókakő village) indicate five stress fields which governed the slip phases: Oligocene N-S extension, Middle Miocene NE-SW extension (syn-rift phase), an ESE-WNW extension (post-rift phase), whilst two phases of strike-slip stress fields show closely spaced compressional axes in NNW-SSE and ~ N-S direction. The former could be late Middle Miocene (12–10 Ma) and the younger can represent the youngest deformation (Fig. 9B). This stress field would induce dextral faulting on the reactivated Mór Fault surface. The ages of these phases are deduced from regional analyses (Fodor et al. 1999) and local overprinting criteria but the absolute ages of the post-rift phases are uncertain; they can range from Late Miocene to Quaternary.
The recent stress field can be projected from regional stress data and earthquake focal mechanisms. The latter indicate NE-SW compression and perpendicular extension (in few events); a transpressional deformation was calculated from events near Oroszlány (Fig. 9A) (Wéber and Süle 2014). The former data are also in agreement with horizontal NE directed maximum stress axis S1 in a compressional or strike-slip type stress field (Bada et al. 2007; Wéber et al. 2020; Békési et al. 2023).
These data suggest a change in the position of S1 stress axes; this was vertical during the late Miocene post-rift phase and changed to horizontal position in the neotectonic phase whilst the S3 axis did not change considerably the orientation just temporally flip to vertical during thrust events. Fault-slip analysis of the MF can support this change from extension to strike-slip phase (from very oblique dextral-normal slip to dextral slip along the MF) (Fig. 9B), although absolute timing of kinematic marks (striae) remains uncertain. Change from normal to strike-slip kinematics suggested for the Csaplár fault (Fodor et al. 2005) also indicate this neotectonic change of stress regime (Fig. 9B). It is important to note, however, that the fault in NNE-SSW to NE-SW direction could have similar kinematics, namely dominantly normal, in both the post-rift extensional and also in the neotectonic phase, because the S3 axis was roughly perpendicular to their strikes. It is also possible that the closely E-W striking segment of the Mór Fault could be reactivated as sinistral or reverse fault; the exact kinematics would depend on the local stress state.
9 Conclusions
The aim of the present study was to select earthquake swarms from the events detected in the Mór Graben, which are characterised by completely different seismic properties than classical earthquakes and/or mine explosions. We used 3 different correlation methods, which we got to know in detail and, finally, we compared them (Table 2) and described their ability limits. Using these methods we found new earthquakes that were invisible to the analyst’s eye. The most effective detector was the subspace detector, which used a linear combination of the master events.
The preparation of this study greatly contributes to our understanding of the complex geological conditions of the Mór Graben, and we received more information about the earthquakes of upper crust origin and their parameter of the epicentres and the hypocentres. The newly determined epicentres of three swarms clearly project on or very near the surface trace of the Mór Fault. Thus, the Mór Fault becomes the best documented active fault by seismological data in the Hungarian part of the PB. Geologic and geomorphologic observations suggest that the fault and its north-western splays could be active in periods of the Quaternary and influence landform evolution including the diversion of creeks. One swarm indicates that the eastern fault system of the Vértes Hills is still active. Together with other structural geological and seismological observations, the active fault system of the area can be composed of NE-SW to E-W striking normal and sinistral faults whilst the N-S to NW–SE trending faults (including the Mór Fault) could have dextral or dextral-reverse kinematics. The change from post-rift to neotectonic stage is marked by the permutation of maximal stress axis S1 to horizontal and its turning to N-S or NE-SW.
Data availability
Our phase data and results are available in the Hungarian National Seismological Bulletin.
References
Bada G, Horváth F, Dövényi P, Szafián P, Windhoffer G, Cloetingh S (2007) Present-day stress field and tectonic inversion in the Pannonian Basin. Global Planet Change 58(1–4):165–180. https://doi.org/10.1016/j.gloplacha.2007.01.007
Balázs A, Matenco L, Magyar I, Horváth F, Cloetingh S (2016) The link between tectonics and sedimentation in back-arc basins: new genetic constraints from the analysis of the Pannonian Basin. Tectonics 35:1526–1559. https://doi.org/10.1002/2015TC004109
Begnaud ML, Anderson DN, Myers SC et al (2021) Correction to: Updates to the regional seismic travel time (RSTT) model: 2. Path-dependent travel-time uncertainty. Pure Appl Geophys 178:2499–2525. https://doi.org/10.1007/s00024-021-02696-0
Békési E, Porkoláb K, Wesztergom V, Wéber Z (2023) Updated stress dataset of the Circum-Pannonian region: implications for regional tectonics and geo-energy applications. Tectonophysics 856:229860. https://doi.org/10.1016/j.tecto.2023.229860
Békési E, Süle B, Lenkey L, Lenkey-Bőgér Á, Bondár I (2017) Double-difference relocation of the 29 January 2011 ML 4.5 Oroszlány earthquake and its aftershocks and its relevance to the rheology of the lithosphere and geothermal prospectivity. Acta Geod et Geophys 52:229–242. https://doi.org/10.1007/s40328-017-0195-7
Bergen K, Yoon C, Beroza GC (2016) Scalable similarity search in seismology: A new approach to large-scale earthquake detection. In: International Conf. on similarity search and applications, Tokyo, pp 301–308
Bergen KJ, Beroza GC (2018) Earthquake fingerprints: extracting waveform features for similarity-based earthquake detection. Pure Appl Geophys 176:1037–1059. https://doi.org/10.1007/s00024-018-1995-6
Bocchini GM, Martínez-Garzón P, Harrington RM et al (2020) Does deep non-volcanic tremor occur in the central-eastern Mediterranean basin? ESS Open Archive. https://doi.org/10.1002/essoar.10503506.1
Bondár I, Mónus P, Czanik C, Kiszely M, Gráczer Z, Wéber Z, the AlpArrayWorking Group (2018) Relocation of seismicity in the Pannonian Basin using a global 3D velocity model. Seismol Res Lett 89(6):2284–2293. https://doi.org/10.1785/0220180143
Bondár I, Myers SC, Engdahl ER, Bergman EA (2004) Epicentre accuracy based on seismic network criteria. Geophys J Int 156(3):483–496. https://doi.org/10.1111/j.1365-246X.2004.02070.x
Bondár I, Storchak D (2011) Improved location procedures at the International Seismological Centre. Geophys J Int 186(3):1220–1244
Bondár I, Czanik CS, Czecze B, Kalmár D, Kiszely M, Mónus P, Pásztor M, Süle B (2021) Hungarian Seismo-Acoustic Bulletin, 2020. Kövesligethy Radó Seismological Observatory, MTA CSFK GGI, Budapest, p 119
Bondár I, Pásztor M, Czanik C, Kiszely M, Mónus P, Süle B (2022) Hungarian Seismo-Acoustic Bulletin, 2021. In: Bondár I (ed) Institute for Geological and Geochemical Research, Research Center for Astronomy and Earth Sciences, ELKH Budapest and Kövesligethy Radó Seismological Observatory, Institute of Earth Physics and Space Science, ELKH, Sopron 175 pp
Budai T, Császár G, Csillag G, Fodor L, Gál N, Kercsmár ZS, Kordos L, Pálfalvi S, Selmeczi I (2008) Geology of the Vértes Mountains. Explanation for the geological map of the Vértes Mountains, Hungarian State Institute of Geology, Budapest, p 368
Chamberlain CJ, Hopp CJ, Boese CM, Warren-Smith E, Chambers D, Chu SX, Michailos K, Townend J (2018) EQcorrscan: repeating and near-repeating earthquake detection and analysis in Python. Seismol Res Lett 89:173–181. https://doi.org/10.1785/0220170151
Csillag G, Fodor L, Müller P, Benkő K (2004) Denudation surfaces, development of Pannonian formations and facies distribution indicate late Miocene to Quaternary deformation of the Transdanubian Range. Geolines 17:26–27
Csillag G, Fodor L, Kordos L, Lantos Z, Selmeczi I, Sztanó O, Thamó-Bozsó E (2008) Quaternary. In: Budai T, Fodor L (eds) Geology of the Vértes Hills. Explanatory book to the Geological Map of the Vértes Hills 1:50000. Geological Institute of Hungary, pp. 114–134
Czanik CS, Kiszely M, Mónus P, Süle B, Bondár I (2021) Identification of quarry blasts aided by infrasound data. Pure Appl Geophys 178:2287–2300
Czecze B, Bondár I (2019) Hierarchical cluster analysis and multiple event relocation of seismic event clusters in Hungary between 2000 and 2016. J Seismol 23:1313–1326. https://doi.org/10.1007/s10950-019-09868-5
Fodor L (2008) Structural geology. In: Budai T, Fodor L (eds) Geology of the Vértes Hills. Explanatory book to the Geological Map of the Vértes Hills 1:50000, vol 145–202. Geological Institute of Hungary, pp. 282–300
Fodor L, Kövér Sz (2013) Post-conference excursion: Cenozoic deformation of the northern Transdanubian Range (Vértes Hills). — Acta Mineralogica-Petrographica. Field Guide Series 31:35–52
Fodor L, Csontos L, Bada G, Györfi I, Benkovics L (1999) Tertiary tectonic evolution of the Pannonian basin system and neighboring orogens: a new synthesis of paleostress data. In: Durand B, Jolivet L, Horváth F, Séranne M (eds) The Mediterranean basins: Tertiary extension within the Alpine Orogen, vol 156. Geological Society, London, Special Publications, pp 295–334. https://doi.org/10.1144/GSL.SP.1999.156.01.15
Fodor L, Bada G, Csillag G, Horváth E, Ruszkiczay-Rüdiger Z, Palotás K, Síkhegyi F, Timár G, Cloetingh S, Horváth F (2005) An outline of neotectonic structures and morphotectonics of the western and central Pannonian Basin. Tectonophysics 410(1–4):15–41
Fodor L, Csillag G, Lantos Z, Budai T, Kercsmár ZS, Selmeczi I (2008) Geological Map of the Vértes Hills, 1:50000. Geological Institute of Hungary, Budapest
Fodor L, Csillag G, Lantos Z, Thamó-Bozsó E, Kiszely M, Tokarski A, Ruszkiczay-Rüdiger Zs (2008) Quaternary deformation and landscape evolution in the Vértes and forelands: inferences from geological mapping. Geolines 21:31–33
Geller RJ, Mueller CS (1980) Four similar earthquakes in central California. Geophys Res Lett 7(10):821–824
Gibbons SJ (2021) The optimal correlation detector? Geophys J Int 228(1):355–365
Gibbons SJ, Ringdal F (2006) The detection of low-magnitude seismic events using array-based waveform correlation. Geophys J Int 165:149–166
Gráczer Z, Szanyi G, Bondár I, Czanik CS, Czifra T, Győri E, Hetényi GY, Kovács I, Molinari B, Süle E, Szucs V, Wesztergom Z, Wéber and AlpArray Working Group (2018) AlpArray in Hungary: temporary and permanent seismological networks in the transition zone between the Eastern Alps and the Pannonian basin. Acta Geodyn Geophys 53:221–245. https://doi.org/10.1007/s40328-018-0213-4
Gráczer Z, Wéber Z (2012) One-dimensional P-wave velocity model for the territory of Hungary from local earthquake data. Acta Geod Geophys Hung 47(3):344–357
Grenerczy G, Sella G, Stein S, Kenyeres A (2005) Tectonic implications of the GPS velocity field in the northern Adriatic region. Geophys Res Lett 32(16):L16311. https://doi.org/10.1029/2005GL022947
Gyalog L (1992) Data from structural geology of Várgestes. Annual Report of the Geological Institute of Hungary 1990:69–74 (in Hungarian)
Handy MR, Schmid SM, Bousquet R, Kissling E, Bernoulli D (2010) Reconciling plate-tectonic reconstructions with the geological-geophysical record of spreading and subduction in the Alps. Earth Sci Rev 102:121–158
Harris DB (2006) Subspace detectors: theory. Lawrence Livermore National Laboratory, UCRL-TR-222758. United States. https://doi.org/10.2172/900081. https://www.osti.gov/servlets/purl/900081
Harris DB, Dodge DA (2011) An autonomous system for grouping events in a developing aftershock sequence. Bull Seismol Soc Am 101:763–774
Hetényi G, Molinari I, Clinton J, Bokelmann G, Bondár I, Crawford WC, Dessa J-X, Doubre C, Friederich W, Fuchs F, Giardini D, Gráczer Z, Handy MR, Herak M, Jia Y, Kissling E, Kopp H, Korn M, Margheriti L, Meier T, Mucciarelli M, Paul A, Pesaresi D, Piromallo C, Plenefisch T, Plomerová J, Ritter J, Rümpker G, Sipka V, Spallarossa D, Thomas C, Tilmann F, Wassermann J, Weber M, Wéber Z, Wesztergom V, Zivcic M, AlpArray Seismic Network Team, AlpArray OBS Cruise Crew, AlpArray Working Group (2018) The AlpArray seismic network: a large-scale European experiment to image the Alpine Orogen. Surv Geophys 39:1009–1033. https://doi.org/10.1007/s10712-018-9472-4
Hicks SP, Verdon J, Baptie B, Luckett R, Mildon ZK, Gernon T (2019) A shallow earthquake swarm close to hydrocarbon activities: discriminating between natural and induced causes for the 2018–2019 Surrey, United Kingdom. Earthq Seq Seismol Res Lett 90(6):2095–2110. https://doi.org/10.1785/0220190125
Horálek J, Fischer T, Einarsson P, Jakobsdótir S (2015) Earthquake swarms. In: Beer Michael, Kougioumtzoglou Ioannis, Patelli Eduardo, Au Siu-Kui (eds) Encyclopedia of Earthquake Engineering. Springer, Berlin, pp 871–885. https://doi.org/10.1007/978-3-642-35344-4 (ISBN 978-3-642-35343-7)
Horváth F, Bada G, Szafián P, Tari G, Ádám A (2006) Formation and deformation of the Pannonian Basin: Constraints from observational data. In: Gee DG, Stephenson R (eds) European lithosphere dynamics. The Geological Society of London, London, pp 191–206
Horváth F, Musitz B, Balázs A, Végh A, Uhrin A, Nádor A, Koroknai B, Pap N, Tóth T, Wórum G (2015) Evolution of the Pannonian basin and its geothermal resources. Geothermics 53:328–352. https://doi.org/10.1016/j.jog.2014.04.006
Horváth F, Cloetingh S (1996) Stress-induced late-stage subsidence anomalies in the Pannonian basin. Tectonophysics 266(1–4):287–300
Kalmár D, Hetényi G, Balázs A, Bondár I, the AlpArray Working Group (2021) Crustal thinning from orogen to back-arc basin: the structure of the Pannonian Basin region revealed by P-to-S converted seismic waves. J Geophys Res: Solid Earth 126:e2020JB021309. https://doi.org/10.1029/2020JB021309
Kercsmár ZS, Fodor L, Pálfalvi S (2006) Tectonic control and basin evolution of the Northern Transdanubian Eocene Basins (Vértes Hills, Central Hungary). Geolines 20:64–66
Kiszely M (2008) Earthquakes in the Vértes Hills region. In: Budai T, Fodor L (eds) Geology of the Vértes Hills. Explanatory book to the geological map of the Vértes Hills 1:50000, vol 203–206. Geological Institute of Hungary, pp. 301–302
Kiszely M (2009) Discrimination of small earthquakes from quarry blasts in the Vértes Hills, Hungary using complex analysis. Acta Geodaetica Geophys Hung 44(2):227–244
Kiszely M, Süle B, Mónus P, Bondár I (2021) Discrimination between local earthquakes and quarry blasts in the Vértes Mountains, Hungary. Acta Geod Geophys 56(3):523–537
Kitaibel P [Pál], Tomcsányi A [Ádám] (1814 [1960]) Dissertatio de terrae motu in genere, ac in specie Mórensi, anno 1810 die 14. januarii orto. Typis Regiae Universitatis Hungaricae, 110 p. Editio ad veri formam speciemque descripta Commentary extremo addita ab Réthly, Antal. Academic, Budapest
Koroknai B, Wórum G, Tóth T, Koroknai Z, Fekete-Németh V, Kovács G (2020) Geological deformations in the Pannonian Basin during the neotectonic phase: new insights from the latest regional mapping in Hungary. Earth-Sci Rev 211:103411. https://doi.org/10.1016/j.earscirev.2020.103411, https://doi.org /https://www.sciencedirect.com/science/article/pii/S0012825220304578
Kóta E (2001) Structural geological reevaluation of the SW part for the Vértes Hills with the application of GIS. MSc Thesis. Department of Applied and Environmental Geology, Eötvös Loránd University, Budapest 70 pp
Lemoine A, Briole P, Bertil D, Roullé A, Foumelis M, Thinon I, Raucoules D, de Michele M, Valty P, Colomer H, Roser, (2020) The 2018–2019 seismo-volcanic crisis east of Mayotte, Comoros islands: seismicity and ground deformation markers of an exceptional submarine eruption. Geophys J Int 223(1):22–44. https://doi.org/10.1093/gji/ggaa273
Maceira M, Rowe CA, Beroza G, Anderson D (2010) Identification of low-frequency earthquakes in non-volcanic tremor using the subspace detector method. Geophys Res Lett 37:L06303
Mogi K (1989) The mechanics of the occurrence of the Matsushiro earthquake swarm in central Japan and its relation to the 1964 Niigata earthquake. Tectonophysics. 159(1–2):109–119. https://doi.org/10.1016/0040-1951(89)90173-X. (Bibcode:1989Tectp.159..109M)
Myers SC, Begnaud ML, Ballard S, Pasyanos ME, Phillips WS, Ramirez AL, Antolik MS, Hutchenson KD, Dwyer JJ, Rowe CA, Wagner GS (2010) A crust and upper-mantle model for Eurasia and North Africa for Pn travel-time calculation. Bull Seismol Soc Am 100:640–656
Nemčok M, Pospisil L, Lexa J, Donelick RA (1998) Tertiary subduction and slab break-off model of the Carpathian-Pannonian region. Tectonophysics 295:307–340
Schaff DP (2008) Semiempirical statistics of correlation-detector performance. Bull Seismol Soc Am 98(3):1495–1507
Schaff DP, Waldhauser F (2005) (2005) Waveform cross-correlation-based differential travel-time measurements at the Northern California Seismic Network. Bull Seism Soc Am 95:2446–2461
Schmid S, Bernoulli D, Fügenschuh B, Matenco L, Schefer S, Schuster R, Tischler M, Ustaszewski K (2008) The Alpine-Carpathian-Dinaridic orogenic system: correlation and evolution of tectonic units. Swiss J Geosci 101:139–183. https://doi.org/10.1007/s00015-008-1247-3
Skoumal RJ, Brudzinski MR, Currie BS (2016) An efficient repeating signal detector to investigate earthquake swarms. Geophys Res: Solid Earth 121:5880–5897
Süle B, Czanik CS, Czecze B, Czifra T, Fodor CS, Gribovszki K, Gyarmati A, Győri E, Kalmár D, Kiszely M, Kovács IJ, Timkó M, Varga P, Wéber Z (eds) (2022) Hungarian National Seismological Bulletin 2021. Kövesligethy Radó Seismological Observatory, ELKH EPSS, Budapest, p 879
Szeidovitz GY (1990) Determining the epicentral intensity and nesting depth of historical earthquakes in the vicinity of Komárom and Mór. PhD candidate dissertation. Hungarian Academy of Sciences, Budapest, p 137
Taeger H (1909) A Vérteshegység földtani viszonyai. Ann Geol Inst Hungarian Kingdom 17(1):1–256
Tari G, Báldi T, Báldi-Beke M (1993) Paleogene retroarc flexural basin beneath the Neogene Pannonian Basin: a geodynamical model. Tectonophysics 226:433–455. https://doi.org/10.1016/0040-1951(93)90131-3
Tari G, Dövényi P, Dunkl I, Horváth F, Lenkey L, Stefanescu M, Szafián P, Tóth T (1999) Lithospheric structure of the Pannonian basin derived from seismic, gravity and geothermal data. In: Durand B, Jolivet L, Horváth F, Séranne M (eds) The Mediterranean Basins: Tertiary extension within the Alpine Orogen, vol 156. Geological Society Special Publications, pp 215–250. https://doi.org/10.1144/gsl.sp.1999.156.01.12
Thamó-Bozsó E, Csillag G, Fodor LI, Müller PM, Nagy A (2010) OSL-dating the Quaternary landscape evolution in the Vértes Hills forelands (Hungary). Quat Geochronol 5(2–3):120–124. https://doi.org/10.1016/j.quageo.2009.02.020
Thouvenot F, Jenatton L, Scafidi D, Turino C, Potin B, Ferretti G (2016) Encore Ubaye: earthquake swarms, foreshocks, and aftershocks in the southern French Alps. Bull Seismol Soc Am 106(5):2244–2257. https://doi.org/10.1785/0120150249. (Bibcode:2016BuSSA.106.2244T)
Tomljenović B, Csontos L (2001) Neogene-Quaternary structures in the border zone between Alps, Dinarides and Pannonian Basin (Hrvatsko Zagorje and Karlovac Basins, Croatia). International Journal of Earth Sciences. 90:560–578. https://doi.org/10.1007/s005310000176
Tóth L, Mónus P, Kiszely M, Trosits D (2021) Yearbook of earthquakes in Hungary - Hungarian Earthquake Bulletin - 2020 GeoRisk, Budapest, 322 pages. HU ISSN 1589–8326. https://doi.org/10.7914/SN/HM
Tóth L, Mónus P, Zsíros T, Kiszely M (2002) Seismicity of the Pannonian basin, Földtani Közlöny 132/special volume, pp 327–337
Ustaszewski K, Herak M, Tomljenović B, Herak D, Matej S (2014) Neotectonics of the Dinarides-Pannonian Basin transition and possible earthquake sources in the Banja Luka epicentral area. J Geodyn 82:52–68 (ISSN 0264-3707)
Varga P, Győri E, Timár G (2021) The most devastating earthquake in the Pannonian Basin: 28 June 1763 Komárom. Seismol Res Lett 92(2A):1168–1180. https://doi.org/10.1785/0220200411
Vrabec M, Fodor L (2006) Late Cenozoic tectonics of Slovenia: structural styles at the northeastern corner of the Adriatic microplate. In: Pinter N, Gy G, Weber J, Stein S, Medak D (eds) The Adria microplate: GPS geodesy, tectonics, and hazards. NATO Science Series IV, vol 61. Springer, pp 151–168
Waldhauser F (2001) hypoDD—A program to compute double-difference hypocenter locations. US Geol Surv Open File Report 01:113
Waldhauser F, Ellsworth WL (2000) A double-difference earthquake location algorithm: method and application to the northern Hayward fault, California. Bull Seismol Soc Am 90(6):1353–1368
Wéber Z, Süle B (2014) Source properties of the 29 January 2011 ML 4.5 Oroszlány (Hungary) mainshock and its aftershocks. Bull Seismol Soc Am 104:113–127. https://doi.org/10.1785/0120130152
Wéber Z, Czecze B, Süle B, Bondár I, AlpArray Working Group (2020) Source analysis of the March 7, 2019 ML = 4.0 Somogyszob, Hungary earthquake sequence. Acta Geod Geophys 55:371–387. https://doi.org/10.1007/s40328-020-00311-7
Wéber Z (2018) (2018) Probabilistic joint inversion of waveforms and polarity data for double-couple focal mechanisms of local earthquakes. Geophys J Int 213(3):1586–1598. https://doi.org/10.1093/gji/ggy096
Wéber Z (2016) Probabilistic waveform inversion for 22 earthquake moment tensors in Hungary: new constraints on the tectonic stress pattern inside the Pannonian basin. Geophys J Int 204(1):236–249
Xiong W, Yu P, Chen W, Liu G, Zhao B, Nie Z, Qiao X (2020) The 2020 Mw 6.4 Petrinja earthquake: A dextral event with large coseismic slip highlights a complex fault system in northwestern Croatia. Geophys J Int 228:1935–1945
Yoon C, O’Reilly O, Bergen K, Beroza GC (2015) Earthquake detection through computationally efficient similarity search. Sci Adv 1:e1501057
Yoon CE, Bergen KJ, Rong K, Elezabi H, Ellsworth WL, Beroza GC, Bailis P, Levis P (2019) Unsupervised large-scale search for similar earthquake signals. BSSA 109(4):1451–1468
Zsíros T (2000) Seismicity and earthquake hazard of the Carpathian basin: Hungarian earthquake catalog (456–1995). Budapest, MTA Earth Science Research Center GGKI, p 495
Zsíros T, Mónus P, Tóth L (1988) Hungarian Earthquake Catalog (456–1986), Budapest 182 pp
Acknowledgements
Special thanks to Márta Kiszely, who discovered these swarms. The figures were prepared with QGIS Geographic Information System and Generic Mapping Tool. The authors express their gratitude to Grzegorz Lizurek and an anonymous reviewer for providing valuable insights that contributed to the enhancement of this paper.
Funding
Open access funding provided by Institute of Earth Physics and Space Science. The reported investigation was financially supported by the National Research, Development and Innovation Fund (K128152, K134873).
Author information
Authors and Affiliations
Contributions
M. K., D. K., B. S., L. F., and B. Cz. conceived and planned the study. Deploying stations, data collection: S. B.; FAST and correlation detector, picking phases: M. K.; subspace detector: D. K.; geological interpretation: L. F., cluster analysis, hypocentre relocation: B. Cz.; draft manuscript preparation: B. Cz., L. F. All authors reviewed the results and approved the final version of the manuscript.
Corresponding author
Ethics declarations
Competing interests
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Czecze, B., Kalmár, D., Kiszely, M. et al. Earthquake swarms near the Mór Graben, Pannonian Basin (Hungary): implication for neotectonics. J Seismol 28, 19–38 (2024). https://doi.org/10.1007/s10950-023-10181-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10950-023-10181-5