
Abstract
This paper considers a modified generalized multidimensional Kadomtsev–Petviashvili equation depending on several real constants, which characterizes the dynamics of solitons and the nonlinear waves in plasma physics and fluid dynamics. We derive the Lie point symmetry generators and Lie symmetry groups and we will apply this symmetry analysis to the equation in order to obtain exact solutions. Finally by means ot the multiplier method, we classify all low-order conservation laws of the equation that have been obtained by applying the corresponding symmetries of the family.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Many important phenomena and dynamic processes can be described by nonlinear partial differential equations [2, 3, 5]. PDEs arising in many physical and chemical fields like fluid dynamics, condensed matter, biophysics, plasma physics, biogenetics, optical fibers, biology and other areas of engineering. A wealth of methods have been developed to find these exact physically significant solutions of a PDE though it is rather difficult [5, 6]. These methods include the sine-cosine method [19], the extended tanh method [13], the simplest equation method [9], non-classical method, the Lie symmetry method [14], the homogeneous balance method [22], sub-equation method [4], multiple exp-function method [12] and others methods [7, 8, 10].
One of the most efficient methods of studying differential equations is the Lie group method or symmetry analysis [6, 11, 14,15,16,17]. A symmetry group of a system of differential equations transforms solutions of the system to other solutions. Once one has determined the symmetry group of a system of differential equations, a number of applications become available.
In this paper, based on the Lie group method, we will investigate a modification and generalization of an important equation to find an optimal system of one-dimensional subalgebras and we used them to perform symmetry reductions and determine new group-invariant solutions of this equation. We consider a modified generalized multidimensional Kadomtsev–Petviashvili equation given by
where n and \(\lambda _i\) for \(i=1,\ldots ,4\) are constants. This equation characterizes the dynamics of solitons and the nonlinear waves in plasma physics and fluid dynamics. The physics of dusty plasmas has been an important topic of rapidly interest from academic point of view and the view of its new applications in space and modern astrophysics because of its huge existence in different areas such as magnetosphere, plasma crystals, cometary tails and atmosphere of lower part of the earth, with potential applications in modern technology, such as metallic and semiconductor nanostructures or microelectronics, quantum dots and carbon nanotubes. During the last decade, the researchers found a great interest to study the propagation of linear and nonlinear characteristics of electrostatic and electromagnetic modes based on the quantum hydrodynamic models.
Several authors have studied some special cases of KP equation, which can be written in normalized form as follows:
where u(t, x, y) is a scalar function, t is the time coordinate and x and y are respectively the longitudinal and transverse spatial coordinates. The case \(\sigma =1\) is known as the KPII equation, and models, for instance, water waves with small surface tension. The case \(\sigma =i\) is known as the KPI equation, and may be used to model waves in thin films with high surface tension. Several authors [1, 18, 23] have studied Eq. (2), using bifurcation analysis, an extended homogeneous balance method and the multiple rogue wave solutions technique respectively. In [20] Wazwaz proposed the modification of KP equation as the below form
in which the propagation of the ion-acoustic waves in a plasma with non-isothermal electrons has been utilized, and in [21] Wazwaz and El-Tantawy proposed the generalized KP equation given as
Equation (1) characterizes the dynamics of solitons and the nonlinear waves in plasma physics and fluid dynamics and in [4] the authors employ the sub-equation method to obtain exact solutions to the proposed strongly nonlinear time-fractional differential equations of conformable type.
The outline of this paper is as follows: In the following section we perform a study of Lie symmetries of the modified generalized multidimensional Kadomtsev–Petviashvili equation (1) and we establish our main results about it. We deal the point symmetries classification, commutators table of Lie algebra, Lie symmetry groups and new solutions that we obtain using these groups. Also we study the symmetry reductions that we can obtain by using the generators calculated previously. In Sect. 2, we employ the similarity variable and similarity solution to obtain symmetry reductions to ODE’s for the modified generalized multidimensional KP equation (1). In Sect. 3 we derive low-order local conservation laws admitted by (1) on the whole solution space, by employing the multiplier method. Finally, concluding remarks are presented in Sect. 4.
2 Lie symmetries
In this section, we will perform Lie symmetry analysis for (1) firstly. The main task of the classical Lie method is to seek some symmetries and look for exact solutions of a given partial differential equation. According to the Lie theory, to obtain Lie symmetries of the modified generalized multidimensional KP equation (1), we consider a one-parameter Lie group of infinitesimal transformations acting on independent and dependent variables
where \(\varepsilon\) is the group parameter and \(\tau ,\) \(\xi _1\), \(\xi _2\), \(\xi _3\) and \(\eta\) are the infinitesimal of the transformations for the independent and dependent variables respectively. The vector field associated with the above group of transformations can be written as
where
with the initial conditions \(({\hat{t}},{\hat{x}},{\hat{y}},{\hat{z}},{\hat{u}})\mid _{\varepsilon =0}=(t,x,y,z,u).\)
Applying the fourth prolongation \(pr^{(4)}V\) to Eq.(1), we obtain the invariance condition,
as the solutions space of (1) is invariant under the point transformation group (5), where
The fourth prolongation is given by
where
with \(J=(j_1,\ldots ,j_k), 1\le j_k\le 4\), \(1\le k\le 4\), \(u_{J,x^i}=\frac{\partial ^{k+1}u}{\partial x^i\partial x^{j1}\ldots \partial x^{j_k}}\) and \(\partial _J=\frac{\partial ^k}{\partial x^{j_1}\partial x^{j_2}...\partial x^{j_k}}\).
Specifically the fourth prolongation can be given as
where \(\phi ^x,\, \phi ^{xx},\, \phi ^{tx},\, \phi ^{yy},\, \phi ^{zz},\, \phi ^{xxxx}\) are given explicitly in terms of \(\tau ,\) \(\xi _1\), \(\xi _2\), \(\xi _3\), \(\eta\) and the derivatives of \(\eta\). By using (10) we find the coefficient functions \(\tau (t,x,y,z,u)\), \(\xi _1(t,x,y,z,u)\), \(\xi _2(t,x,y,z,u)\), \(\xi _3(t,x,y,z,u)\) and \(\eta (t,x,y,z,u)\). From (7) and (10), the invariance condition reads as
where
and \(D_t\), \(D_x\), \(D_y\) and \(D_z\) t denote the total differential operators with respect to t, x, y and z
where \(i=1,2,3,4\) and \((x^1,x^2,x^3,x^4)=(t,x,y,z)\).
2.1 Classification of Lie point symmetries
In this section we calculate the Lie point symmetries admitted by the modified generalized multidimensional Kadomtsev–Petviashvili equation (1). A point symmetry of (1) is a one-parameter Lie group of transformations on (t, x, y, z, u) generated by a vector field of the form (6), whose prolongation leaves invariant equation (1). The condition for a vector field (6) to generate a point symmetry of Eq. (1) is given by (11), that splits with respect to the x, y, z and t derivatives of u giving an overdetermined linear system of equations for the infinitesimals \(\tau (t,x,y,z,u),\,\) \(\xi _1(t,x,y,z,u),\,\) \(\xi _2(t,x,y,z,u)\), \(\xi _3(t,x,y,z,u)\) and \(\eta (t,x,y,z,u)\) and the parameters a, b. Solving this system we obtain the next theorem:
Theorem 1
The point symmetries admitted by Eq. (1) are generated by:
-
1.
For \(\lambda _3\ne 0\) and \(\lambda _4\ne 0\):
$$\begin{aligned} V_1= & {} \partial _t,\quad V_2=\partial _x, \quad V_3=\partial _y,\quad V_4=\partial _z ,\nonumber \\ V_5= & {} t\partial _t+\frac{1}{3}x\partial _x+\frac{2}{3}y\partial _y+\frac{2}{3}z\partial _z-\frac{2}{3n}u\partial _u,\nonumber \\ V_6= & {} z\partial _x-2\lambda _4 t\partial _z ,\quad V_7=\lambda _3 z\partial _y-\lambda _4 y\partial _z , \quad V_8=y\partial _x-2\lambda _3 t\partial _y \end{aligned}$$(13) -
2.
For \(\lambda _3=0\) and \(\lambda _4\ne 0\):
$$\begin{aligned}&V_1,\, V_3,\, V_5,\, V_{f_1}=f_1(y)\partial _x,\, \nonumber \\&V_{g_1}=z g_1(y)\partial _x-2\lambda _4 t g_1(y)\partial _z,\, V_{h_1}=h_1(y)\partial _z \end{aligned}$$(14) -
3.
For \(\lambda _3\ne 0\) and \(\lambda _4=0\):
$$\begin{aligned}&V_1,\, V_4,\, V_5,\, V_{f_2}=f_2(z)\partial _x, \nonumber \\&V_{g_2}=y g_2(z)\partial _x-2\lambda _4 t g_2(z)\partial _y,\, V_{h_2}=h_2(z)\partial _y \end{aligned}$$(15) -
4.
For \(\lambda _3\ne 0\) and \(\lambda _4\ne 0\):
$$\begin{aligned} V_1,\, V_5,\, V_{f}=F(y,z)\partial _x,\, V_{G_1}= G_1(z)\partial _y,\, V_{G_2}=G_2(y)\partial _z \end{aligned}$$(16)
Proof
By using (11), letting the coefficients \(\tau (t,x,y,z,u),\,\) \(\xi _1(t,x,y,z,u),\,\) \(\xi _2(t,x,y,z,u)\), \(\xi _3(t,x,y,z,u)\) and \(\eta (t,x,y,z,u)\) of the polynomial be zero yields a set of differential equations of the functions. By simplifying the system, we obtain
Solving system (17) on can arrive at the previous generators. \(\square\)
The previous vector fields are closed under the Lie bracket. Thus the symmetry generators form a closed Lie algebra. The commutation relationships of Lie algebras determined by the symmetry generators (13) are shown in Table 1, where \([V_i,V_j]\) is the commutator for the Lie algebra defined by
Then we build the adjoint table for each pair of elements \(V_i\) and \(V_j\), with \(i,j = 1,\ldots ,7\), where
The adjoint relationship of the Lie algebra is shown in Table 2. We will use the adjoint representation to decompose all the subalgebras of the Lie algebra in equivalence classes of conjugated subalgebras. From the action attached infinitesimal of a Lie algebra over itself, we can rebuild the adjoint representation to the underlying Lie group adding the Lie series.
To calculate the reductions of Eq. (1) we use elements of the optimal system of subalgebras. An optimal system of subalgebras is a list of subalgebras that are not equivalent or conjugated. Also, any other subalgebra of the Lie algebra is conjugated or equivalent with it. For calculate the optimal system, we first calculate the adjoint transformation matrix of the modified generalized multidimensional Kadomtsev–Petviashvili equation (1). We consider a linear combination of \(V_i\)
and we define
The function \(f_i^\epsilon\) is a linear maps for \(i=1,2,\ldots ,8\), also we define the matrix \(A_i^\epsilon\) with respect to basis \(\{V_1,V_2,V_3,V_4,V_5,V_6,V_7,V_8\}\), for \(i=1,2,\ldots ,8\) as follows:
with
Finally the general adjoint matrix A, calculated using the previous matrix, is given by
where
By using (21) the adjoint transformation equation to (1) is
Then we have the equation system
and it must have solutions for \(\epsilon _i\) for \(i=1,2,\ldots ,8\), for certain values of \(\alpha _i\) and \(\beta _i\), \(i=1,2,\ldots ,8\). Then we can obtain the generators of the optimal one-dimensional system: \(\alpha _1V_1+\alpha _2V_2+\alpha _3V_3+\alpha _4V_4, \, V_5,\, V_6+\alpha V_1+\beta V_3,\, V_7+\alpha V_1+\beta V_2, \,V_8+\alpha V_1+\beta V_4\).
2.2 Lie symmetry groups and new solutions
In this part, by solving the following initial problems, we can get the Lie symmetry group from the related symmetries to get some new exact solutions from the known ones. To calculate the one-parameter Lie symmetry group g(t, x, y, z, u) generated through the general vector field (6), we consider
and we solve the following initial problems
Therefore, from (24) we can obtain the corresponding Lie symmetry group, that is to say the one-parameter Lie symmetry groups \(g_i\), \(i = 1,\ldots ,8,\) which are generated through \(V_i\), \(i = 1,\ldots ,8\), respectively are given by
where \(\epsilon\) is the group parameter. The theory of Lie assures that a group of symmetry transforms solution into solutions, then we can conclude that if \(u=f(t, x, y,z)\) represents a known solution of the differential equation (1), by applying the different groups of symmetry \(g_i\), \(i=1,\ldots 8,\) we can calculate the new solutions of (1).
Based on (25), the corresponding new solutions of (1) can be given by:
3 Symmetry reductions
In this section we mainly consider the one-dimensional subalgebras computed in the previous subsection and obtain symmetry reductions of modified generalized multidimensional Kadomtsev–Petviashvili equation. Similarity variables and similarity solutions associated with any vector field \(V=\tau \partial _t+\xi _1\partial _x+\xi _2\partial _y+\xi _3\partial _z+\eta \partial _u\) can be accomplished by its Lagrange’s system
(i) We first consider the Lie point symmetry \(\alpha _1 V_1+\alpha _2 V_2+\alpha _3 V_3+\alpha _4 V_4\). Equation (34) becomes
and we obtain the similarity variables and similarity solution
Substituting (35) into (1) we obtain a new reduction equation with the independent variables \(w_1\), \(w_2\) and \(w_3\) as follows
Again, utilizing the Lie symmetry method on Eq. (36), we obtain the following similarity variables and similarity solution
and the following reduction equation with the independent variables \(s_1\) and \(s_2\)
(ii) We now consider the Lie point symmetry \(V_5\) and Eq. (34) becomes
We obtain the similarity variables and similarity solution
and the new reduction equation with the independent variables \(w_1\), \(w_2\) and \(w_3\)
By using the following similarity variables and similarity solution with (40)
we obtain the following reduction equation with the independent variables \(s_1\) and \(s_2\)
One more time we apply the Lie symmetry method, to equation (42) this time. We obtain the point symmetries for this equation. By using the similarity variable and similarity solution \(r=s_2 s_1^{-4}\) and \(g=f(r)s_1^{-\frac{2}{n}}\) we obtain the following reduction EDO with the independent variable r and dependent variable f,
with solution when \(\lambda _1=0\) given by
where \(\gamma _1= \frac{\sqrt{\lambda _3\lambda _4}}{8\sqrt{r\lambda _2}}\) and it give us the following solution for (1)
and \(\gamma _1= \frac{\sqrt{\lambda _3\lambda _4}}{8\sqrt{\lambda _2 x^{-4-\frac{2}{n}}(\lambda _4 y^2 +\lambda _3 z^2) }}\).
In Fig. 1 we considere (45) in the cases \(z=1\), \(x=1\) and \(y=1\) respectively and \(\lambda _1=0,5, \lambda _2=2, \lambda _3=1\), \(\lambda _4=1\), \(c_1=-1, c_2=0,4, c_3=1, c_4=2\).

(iii) We first consider the Lie point symmetry \(V_6+\alpha _1 V_1+\alpha _3 V_3\) and we obtain the similarity variables and similarity solution
and the following reduction equation, for \(\lambda _4=0\), with the independent variables \(w_1\), \(w_2\) and \(w_3\)
Applying the Lie symmetry method on Eq. (47), we obtain the following similarity variables and similarity solution
and the following reduction equation with the independent variables \(s_1\) and \(s_2\)
When \(f_1(w_2)=f_2(w_2)=1\) Eq. (49) give us
with solution when \(n=0\) and \((\lambda _2+s_2)(\lambda _1-\alpha _2-\lambda _3)>0\)
and the following solution in the case \(n=0\) and \((\lambda _2+s_2)(\lambda _1-\alpha _2-\lambda _3)<0\),
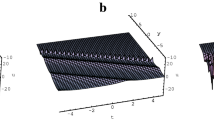
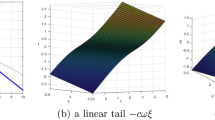
This give us the following solutions of (1) respectively
and
In Fig. 2 we considere (53) in the cases \(z=0\), \(t=1\) and \(z=1\), \(y=1\) respectively with \(\alpha _2=-1\), \(\lambda _1=2, \lambda _2=0,5, \lambda _3=1\), \(c_1=1, c_2=1, c_3=1, c_4=1\). In Fig. 3 we considere (54) in the cases \(z=0\), \(t=1\) and \(z=1\), \(y=1\) respectively with \(\alpha _2=1\), \(\lambda _1=2, \lambda _2=0,5, \lambda _3=1\), \(c_1=1, c_2=1, c_3=1, c_4=1\).


(iv) When we consider the Lie point symmetry \(V_7+\alpha _1 V_1+\alpha _2 V_2\) we obtain for \(\lambda _4=0\) the similarity variables and similarity solution
and the reduction equation with the independent variables \(w_1\), \(w_2\) and \(w_3\) as follows
(v) When we use the generator \(V_8+\alpha _1 V_1+\alpha _4 V_4\) we obtain the similarity variables and similarity solution
Substituting (35) into (1) and the following reduction equation
4 Conservation laws
Conservations laws are very important in the study of differential equations. They have also been used in the development of numerical methods and in obtaining exact solutions for some partial differential equations. They describe chemical and physical conserved quantities such as energy, electric charge, mass, etc. A local conservation law for the modified generalized multidimensional Kadomtsev–Petviashvili equation (1) is a divergence expression holding on the whole solution space \(\varepsilon\) of equation (1)
The conserved density T and the spatial fluxes X, Y and Z are functions of t, x, y, z, u and derivatives of u. Here \(D_t\), \(D_x\), \(D_y\) and \(D_z\) denote the total derivative operators with respect t, x, y and z respectively. This method makes use of the concept of multiplier, that is, a function
which satisfies that
is a divergence expression for solutions of (1) and for any function u(t, x, y, z). There is a one-to-one correspondence between non-trivial multipliers and non-trivial conservation laws in characteristic form.
All non-trivial conservation laws arise from multipliers. When we move off of the set of solutions of Eq. (1), every non-trivial local conservation law (59) is equivalent to one that can be expressed in the characteristic form
that vanishes on the set of solutions of Eq. (1) where \(({\widehat{T}},{\widehat{X}},{\widehat{Y}}, {\widehat{Z}})\) differs from (T, X, Y, Z) by a trivial conserved current. We find all multipliers by solving the determining equation
where \(\frac{\delta }{\delta u}\) is the Euler–Lagrange operator \({\hat{E}}[u]\) given by
and the general form for a low-order multiplier for the generalized (2+1)-dimensional nonlinear evolution equation (1) is given by \(Q(t, x, y, u, u_t, u_x, u_y, u_z, u_{xx}, u_{xxx}).\) The determining equation (61) yields a linear determining system for the multipliers Q(t, x, y, z, u).
We solve this determining system and we get the multiplier \(Q=1\). For each of the conserved currents obtained, Eq. (59) is satisfied when the modified generalized multidimensional KP equation holds. By solving the determining equation (61), the solution multiplier Q give us these conserved densities and fluxes of Eq. (1). The low-order local conservation laws admitted on the whole solution space \(\varepsilon _{+}\) by the modified generalized multidimensional KP equation (1) are given by
5 Concluding remarks
In this paper, by using the Lie symmetry analysis method we studied the modified generalized multidimensional Kadomtsev–Petviashvili equation (1). For the first time, the classical Lie point symmetries were used to construct an optimal system of one-dimensional subalgebras. This system was then used to obtain symmetry reductions and new group-invariant solutions of (1). Also we have calculated the Lie symmetry group from the related symmetries to get some new exact solutions from the known ones. Again for the first time, we have derived the conservation laws for (1) by employing the multiplier method.
References
U.M. Abdelsalam, F.M. Allehiany, Different nonlinear solutions of KP equation in dusty plasmas. Arab. J. Sci. Eng. 43, 399–406 (2018)
M.J. Ablowitz, P.A. Clarkson, Soliton, Nonlinear Evolution Equation and Inverse Scattering (Cambridge University Press, Cambridge, 1991)
M. Abramowitz, I.A. Stegun, Handbook of Mathematical Functions with Formulas, Graphs, and Mathematical Tables (Dover, New York, 1972)
L. Akinyemi, M. Senol, O.S. Iyiola, Exact solutions of the generalized multidimensional mathematical physics models via sub-equation method. Math. Comput. Simul. 182, 211–233 (2020)
G.W. Bluman, J.D. Cole, The general similarity solutions of the heat equation. J. Math. Mech. 18, 1025–1042 (1969)
G.W. Bluman, S. Kumei, Symmetries and Differential Equations (Springer, New York, 1989)
A.S. Fokas, Q.M. Liu, Generalized conditional symmetries and exact solutions of nonintegrable equations. Theor. Math. Phys. 99, 263–277 (1994)
R. Hirota, The Direct Method in Soliton Theory (Cambridge University Press, Cambridge, 2004)
N.A. Kudryashov, Simplest equation method to look for exact solutions of nonlinear differential equation. Chaos Solitons Fractals 24, 1217–1231 (2005)
N.A. Kudryashov, One method for finding exact solution of nonlinear differential equations. Commun. Nonlinear Sci. Number Simul. 17, 2248–2253 (2012)
H. Liu, J. Li, Q. Zhang, Lie symmetry analysis and exact explicit solutions for general Burger’s equation. J. Comput. Appl. Math. 228, 1–9 (2009)
W.X. Ma, T. Whang, Y. Zhang, A multiple exp-function method for nonlinear differential equations and its applications. Phys. Scr. 82, 065003 (2010)
W. Malfliet, The tanh method: a tool for solving certain classes of nonlinear evolution and wave equations. J. Comput. Appl. Math. 164–165, 529–541 (2004)
P.J. Olver, Applications of Lie Groups to Differential Equations. Graduate Texts in Mathematics, vol. 107, 2nd edn. (Springer, Berlin, 1993)
A. Ouhadan, E.H. El Kinani, Lie Symmetries and Preliminary Classification of Group-Invariant Solutions of Thomas equation. Arxviv Preprint (2005). arXiv:0412043v2
S. Sáez, Symmetry analysis of a generalized 2D Zakharov–Kuznetsov–Burgers equation with a variable dissipation. J. Math. Chem. 58(10), 2415–2424 (2020)
S. Sáez, R. de la Rosa, E. Recio, T.M. Garrido, M.S. Bruzón, Lie symmetries and conservation laws for a generalized (2+1)-dimensional nonlinear evolution equation. J. Math. Chem. 58, 775–798 (2020)
R.A. Shahein, A.R. Seadawy, Bifurcation analysis of KP and modified KP equations in an unmagnetized dust plasma with nonthermal distributed multi-temperatures ions. Indian J. Phys. 93(7), 941–949 (2019)
M. Wazwaz, The tanh and sine-cosine method for compact and noncompact solutions of nonlinear Klein Gordon Equation. App. Math. Comput. 167, 1179–1195 (2005)
A.M. Wazwaz, Multi-front waves for extended form of modified Kadomtsev–Petviashvili equations. Appl. Math. Mech 32(7), 875–880 (2011)
A.M. Wazwaz, S.A. El-Tantawy, A new (3+1)-dimensional generalized Kadomtsev–Petviashvili equation. Nonlinear Dyn. 84, 1107–1112 (2016)
X. Zhao, L. Wang, W. Sun, The repeated homogeneous balance method and its applications to nonlinear partial differential equations. Chaos Solitons Fractals 28, 448–453 (2006)
J. Zhao, J. Manafian, N.E. Zaya, S.A. Mohamed, Multiple rogue wave, lump-periodic, lump-soliton, and interaction between k-lump and k-stripe soliton solutions for the generalized KP equation. Math. Methods Appl. Sci. 44(6), 5079–5098 (2021)
Acknowledgements
The authors express their sincerest gratitude to the Plan Propio de Investigación de la Universidad de Cádiz.
Funding
Open Access funding provided thanks to the CRUE-CSIC agreement with Springer Nature.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sáez, S. On the modified generalized multidimensional KP equation in plasma physics and fluid dynamics in (3 + 1) dimensions. J Math Chem 61, 125–143 (2023). https://doi.org/10.1007/s10910-022-01412-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10910-022-01412-0