
Abstract
The Burgers-type equations are noticed in plasma astrophysics, ocean dynamics, atmospheric science, computational fluid mechanics, cosmology, condensed matter physics, statistical physics, nonlinear acoustics, vehicular traffic, electronic transport, etc. This prompts us to examine an extended (2 + 1)-dimensional coupled Burgers system in fluid mechanics. We determine novel exact solutions by the Lie symmetry method in conjunction with Kurdyshov method. Finally, conservation laws of the abovementioned system are generated. The findings can well mimic complex waves and their dealing dynamics in fluids.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Modeling various physical events that occur in several fields of physics, engineering, and applied mathematics is done using nonlinear evolution equations (NLEEs). In order to better comprehend the phenomena that these NLEEs mimic, it is crucial to look at the precise explicit solutions of NLEEs [1,2,3,4,5,6]. Recently one type NLEE is the Burgers-type equation [7,8,9,10,11,12,13,14,15,16,17,18,19,20,21,22,23] that arises in different field of science such as in plasma astrophysics, ocean dynamics, atmospheric science, computational fluid mechanics, cosmology, condensed matter physics, statistical physics and so forth. In this paper, we investigate the following extended (2 + 1)-dimensional coupled Burgers system in fluid mechanics [24]
where u(x,y,t) and v(x,y,t) are the velocity components in fluid related problems and α,β,γ are real constants. In [24] with the aid of symbolic computation constructed a hetero-B\(\ddot { a}\)cklund transformation and a similarity reduction for (1.1a).
An exceptional case of (1.1a)
which is similar to the incompressible Navier-Stokes equations without the pressure and continuity considerations [18]. It is said to constitute an appropriate model for developing computational algorithms for solving the incompressible Navier-Stokes equations [23], to be a suitable test case because the equation structure is similar to that of the incompressible fluid flow momentum equations [19] and to be used in models for the study of hydrodynamical turbulence and wave processes in nonlinear media [19]. Note that u(x,y,t) and v(x,y,t) are the velocity components in fluid-related problems [14, 18], Re is the Reynolds number. In contrast, \(\frac {1}{R_{e}}\) represents the viscosity [14], the total or material derivative including the convective term is used while the diffusive and convective terms are linked with Re [18].
2 Symmetry Reductions (1.1a)
The symmetry generator of an extended (2 + 1)-dimensional coupled Burgers system in fluid mechanics (1.1a) will be generated by the vector field
where
Expanding the above equation and splitting on the derivatives of u and v, where X[2] is the second prolongation, leads to the following linear overdetermined system of partial differential equations.
Solving the above system of partial differential equations with the aid of Maple program the above general solution contains five arbitrary constants. Thus, the infinitesimal symmetries of system (1.1a) form the five-dimensional Lie algebra spanned by the following linearly independent generators:
2.1 Symmetry Reductions of (1.1a)
In order to construct symmetry reductions and exact solutions, we need to implement the associated Lagrange equations
The linear combination of the translation symmetries Γ = a1X1 + a2X2 + a3X3, where a1,a2,a3 are constants reduces (1.1a) to a partial differential equation (PDE). The symmetry Γ yields the following four invariants
Hence (1.1a) reduces to a PDE in two independent variables given below
which is a nonlinear PDE in two independent variables f and g. We now further reduce this equation using its symmetries. The above equation has the two translation symmetries, namely
By taking a linear combination b1Υ1 + b2Υ2 of the above symmetries, we see that it yields the invariants
Now treating E and F as new dependent variables, z as the new independent variable then the system (1.1a) reduces to the second order ordinary differential equations
3 Exact Solutions Using Kudryashov Method
The intention of this segment is to introduce the algorithm of the Kudryashov method for finding exact solutions of the nonlinear evolution equations. The Kudryashov method was one of the original procedures for acquiring exact solutions of nonlinear partial differential equations. Let us briefly recall the basic steps of the Kudryashov method. Consider for instance a scalar nonlinear partial differential equation in the form
We use the following ansatz
From (3.1) we obtain the nonlinear ordinary differential equation
which has a solution of the form
where
satisfies the equation
M is a positive integer and A0,⋯ ,AM are parameters to be determined.
3.1 Application of the Kudryashov Method
The solutions of (2.6) are of the form
Reverting back to our underlying system (1.1a), the solution structure takes the form
The above solution structure is attained by beplacing (3.7a) into (2.6) and making use of (3.5), and then equating all coefficients of the functions Hi to zero, to obtain an overdetermined system of algebraic equations. Solving the resultant system leads to following possible solutions with its associated cases.
3.1.1 M = 1
Considering M = 1 the desired solution take the form below.
Case 1
Case 2
Case 3
3.1.2 M = 3
Upon setting M = 3 the desired solutions take the form below.
Case 1
Case 2
3.1.3 M = 4
Considering M = 4 the desired solutions take the form below.
Case 1
Case 2
3.1.4 M = 5
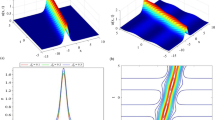
Setting M = 5 the solutions of (1.1a) take the form outlined below (Fig. 1).
Case 1

Evolution of the travelling wave solutions (3.10a)
Case 2
Case 3
3.1.5 M = 6
Finally upon letting M = 6 the solutions of (1.1a) take the form below.
Case 1
Case 2
4 Conservation Laws
A conservation law of system (1.1a) is a total space-time divergence expression that vanishes on the solution space ε of system (1.1a),
where Dt, Dx and Dy are the total derivative operators while Tt is a conserved density and Tx, Ty a spatial flux. To determine the conservation law for system (1.1a), we will implement the multiplier method. Since the joint Euler operator annihilates the total divergence, we get
where Λ1 and Λ2 are the second-order multipliers to be determined. The expansion of (4.2) and (4.3) where β = γ, split and simplify yields the following multipliers
where ci, i = 1,2,3 are arbitrary constants. The multipliers Λ1 and Λ2 of system (1.1a) has the property
for the arbitrary functions u(t,x,y) and v(t,x,y), where the predetermined arguments of Tt, Tx and Ty are of some order in derivatives of the field variables u, v and w. The computations for Tt, Tx and Ty from equation (4.6) reveal that corresponding to the above multipliers we have the following conserved vectors for system (1.1a):
We succinctly discuss the significance and physical illumination that ascend from the computed conservation laws. Conservation laws reside in enormously crucial areas both at the foundations of nonlinear science and in its applications. Mathematical expressions of physical laws, such as conservation of energy, momentum and mass are fundamentally conservation laws. Imperative physical information about the complex behaviour in non-linear systems is confined in conservation laws.
5 Concluding Remarks
Today’s work was concerned with a Burgers-type equations that are noticed in plasma astrophysics, ocean dynamics, atmospheric science, computational fluid mechanics, cosmology, condensed matter physics, statistical physics, nonlinear acoustics, vehicular traffic, electronic transport, etc. We determined novel type exact solutions by the Lie symmetry method in conjunction with Kurdyshov method. Finally, conservation laws of the abovementioned system were generated. These new research findings can well mimic complex waves and their dealing dynamics in fluids. Some diverse interaction phenomenon shown graphically have great implication to the nonlinear waves in fluid mechanics. In this paper, the methods used to obtain new exact solutions also can be extended to solve other nonlinear partial different equation of physical interest. For some important classical mathematical and physical models, the techniques shown in this work are of great importance. The precise solutions that were discovered in this study may be utilized as comparison points with numerical simulations in theoretical physics and fluid mechanics, and the conservation laws that were discovered can be used to create numerical integrators for the underlying system.
Data Availability
Not applicable.
References
Lü, X., Chen, S.-J.: New general interaction solutions to the KPI equation via an optional decoupling condition approach. Commun. Nonlinear Sci. Numer. Simul. 103 (2021)
Yin, Y.-H., Lü, X., Ma, W.-X.: Bäcklund transformation, exact solutions and diverse interaction phenomena to a (3 + 1)-dimensional nonlinear evolution equation. Nonlinear Dyn. 108(4), 4181–4194 (2022)
Liu, B., Zhang, X.-E., Wang, B., Lü, X.: Rogue waves based on the coupled nonlinear Schrödinger option pricing model with external potential. Modern Physics Letters B, 36(15) (2022)
Yin, M.-Z., Zhu, Q.-W., Lü, X.: Parameter estimation of the incubation period of COVID-19 based on the doubly interval-censored data model. Nonlinear Dyn. 106(2), 1347–1358 (2021)
Lü, X., Hui, H.-W., Liu, F.-F., Bai, Y.-L.: Stability and optimal control strategies for a novel epidemic model of COVID-19. Nonlinear Dyn. 106 (2), 1491–1507 (2021)
Lü, X., Chen, S.-J.: Interaction solutions to nonlinear partial differential equations via Hirota bilinear forms: one-lump-multi-stripe and one-lump-multi-soliton types. Nonlinear Dyn. 103(1), 947–977 (2021)
Shan, S.A., Imtiaz, N.: Shocks in an electronegative plasma with Boltzmann negative ions and-distributed trapped electrons. Physics Letters, Section A General, Atomic and Solid State Physics 383, 2176–2184 (2019)
Gao, X.-Y., Guo, Y.-J., Shan, W.-R.: Water-wave symbolic computation for the Earth, Enceladus and Titan: The higher-order boussinesq-Burgers system, auto- and non-auto-bäcklund transformations. Appl. Math. Lett. 104 (2020)
Gao, X.-Y., Guo, Y.-J., Shan, W.-R.: Scaling and hetero-/auto-bäcklund transformations with solitons of an extended coupled (2 + 1)-dimensional Burgers system for the wave processes in hydrodynamics and acoustics. Modern Physics Letters B 34 (2020)
Meyer, G., Vitiello, G.: On the molecular dynamics in the hurricane interactions with its environment. Physics Letters, Section A: General Atomic and Solid State Physics 382, 1441–1448 (2018)
El-Labany, S.K., El-Taibany, W.F., Atteya, A.: Bifurcation analysis for ion acoustic waves in a strongly coupled plasma including trapped electrons. Physics Letters, Section A General, Atomic and Solid State Physics 382, 412–419 (2018)
Osman, M.S., Baleanu, D., Adem, A.R., Hosseini, K., Mirzazadeh, M., Eslami, M.: Double-wave solutions and Lie symmetry analysis to the (2 + 1)-dimensional coupled Burgers equations. Chin. J. Phys. 63, 122–129 (2020)
Wazwaz, A.-M.: Multiple-front solutions for the Burgers equation and the coupled Burgers equations. Appl. Math. Comput. 190, 1198–1206 (2007)
Srivastava, V.K., Singh, S., Awasthi, M.K.: Numerical solutions of coupled Burgers’ equations by an implicit finite-difference scheme. AIP Adv. 3 (2013)
Islam, S.U., Šarler, B., Vertnik, R., Kosec, G.: Radial basis function collocation method for the numerical solution of the two-dimensional transient nonlinear coupled Burgers’ equations. Appl. Math. Model. 36, 1148–1160 (2012)
Ali, A., Haq, S., Islam, S.: A computational meshfree technique for the numerical solution of the two-dimensional coupled Burgers’ equations. Int. J. Comput. Methods Eng. Sci. Mech. 10, 406–422 (2009)
Young, D.L., Fan, C.M., Hu, S.P., Atluri, S.N.: The Eulerian-Lagrangian method of fundamental solutions for two-dimensional unsteady Burgers’ equations. Eng. Anal. Boundary Elem. 32, 395–412 (2008)
Shankar, R., Singh, T.V., Bassaif, A.A.: Numerical solution of coupled Burgers equations in inhomogeneous form. Int. J. Numer. Methods Fluids 20, 1263–1271 (1995)
Bahadr, A.F.: A fully implicit finite-difference scheme for two-dimensional Burgers’ equations. Appl. Math. Comput. 137, 131–137 (2003)
Zafarghandi, F.S., Mohammadi, M., Babolian, E., Javadi, S.: A localized Newton basis functions meshless method for the numerical solution of the 2D nonlinear coupled Burgers’ equations. Int. J. Numer. Meth. Heat Fluid Flow 27, 2582–2602 (2017)
Wubs, F.W., de Goede, E.D.: An explicit-implicit method for a class of time-dependent partial differential equations. Appl. Numer. Math. 9, 157–181 (1992)
Fletcher, C.A.J.: Generating exact solutions of the two-dimensional Burgers’ equations. Int. J. Numer. Methods Fluids 3, 213–216 (1983)
Abazari, R., Borhanifar, A.: Numerical study of the solution of the Burgers and coupled Burgers equations by a differential transformation method. Comput. Math. Appl. 59, 2711–2722 (2010)
Gao, X-Y, Guo, Y-J, Shan, W-R: Hetero-Bäcklund transformation and similarity reduction of an extended (2 + 1)-dimensional coupled Burgers system in fluid mechanics. Physics Letters, Section A: General, Atomic and Solid State Physics, 384(31) (2020)
Funding
Open access funding provided by University of South Africa. Not applicable.
Author information
Authors and Affiliations
Contributions
AR Adem: Conceptualization, Formal analysis, Investiga-tion, Methodology, Project administration, Software, Supervision, Validation, Writing – original draft, Writing – review and editing.
B Muatjetjeja: Investigation, Methodology, Software, Validation, Writing– review and editing.
TS Moretlo: Investigation, Methodology, Software, Validation, Writing – review and editing.
Corresponding author
Ethics declarations
Ethics approval
Not applicable.
Conflict of Interests
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Adem, A.R., Muatjetjeja, B. & Moretlo, T.S. An Extended (2 + 1)-dimensional Coupled Burgers System in Fluid Mechanics: Symmetry Reductions; Kudryashov Method; Conservation Laws. Int J Theor Phys 62, 38 (2023). https://doi.org/10.1007/s10773-023-05298-9
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10773-023-05298-9