
Abstract
Lack of motivation and enjoyment is a challenge that many students face. Due to the current coronavirus pandemic, many lessons are not being conducted face-to-face. However, the use of robots has been proven able to alleviate this challenge. This review explores the barriers and facilitators of robot-assisted education among higher education students. Ten databases were comprehensively searched for studies in English. Both published and unpublished studies were considered without a time limit. A systematic mixed-studies review was adopted and the mixed method appraisal tool was used to assess the methodological quality of the selected articles. The qualitative and quantitative findings were then synthesized via thematic and narrative syntheses, respectively. To integrate these two sets of findings, a result-based convergent synthesis was performed. A total of 28 studies covering 1689 higher education students across 14 countries were eventually used for the analysis. Most of these studies had average to high methodological quality. Two barrier themes were identified from these studies, namely, poor audio verbatim from the robots, and disruption and restrictions from software and hardware of the robot. Meanwhile, three themes related to facilitators were identified, namely, greater engagement in learning, facilitation in remote learning, and knowledge enhancement. The use of robot-assisted education has been proven to improve student learning in higher education. Robot-assisted education is an alternate educational technique that can be utilized to supplement and augment ongoing teaching arrangements. Future studies should examine a specific type of robot in a comparable learning environment.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Motivation to learn is critical for higher education (Yamashita et al., 2022). Lack of motivation is significantly related to high attrition rates in online higher education (Lucey, 2018). It is a significant predictor of leaving university without completing their degrees (Rump et al., 2017). Enjoyment is another critical component of learning (Hernik & Jaworska, 2018). Previous studies show that students consider their learning effective learning if enjoyment is present (Hernik & Jaworska, 2018; Okada & Sheehy, 2020). Lack of enjoyment in higher education is also a strong predictor of dropping out (Brubacher & Silinda, 2019). This issue is further exacerbated by the novel coronavirus (COVID-19) outbreak (Hong et al., 2017; Lizarondo et al., 2020), which forced students and teachers to switch to an online mode of learning (Almendingen et al., 2021; World Economic Forum, 2020; Wu, 2021). A recent study revealed that low motivation and enjoyment were associated with a low sense of belonging at university (Pedler et al., 2022). Therefore, improvement in motivation and enjoyment in their studies are essential elements, which can impact student achievement and contribute to student retention (Hernik & Jaworska, 2018; Yamashita et al., 2022).
Robots have the potential to become valuable tools in the educational field (Alnajjar et al., 2021). The evidence supported that robot is capable of assuming the roles of either a tutor or peer or serving as facilitators of learning activities (Anwar et al., 2019). Educational robotics (ER) is a popular method of teaching Science, Technology, Engineering, and Mathematics (STEM) subjects to students in grades K-12 through university (Souza et al., 2018; Zhong & Xia, 2020). This innovative educational method has showed valuable for learning by offering activities that are both enjoyable and functional (Afari & Khine, 2017; Alnajjar et al., 2021). Together with an attractive environment, ER can pique the interest and curiosity of students (Anwar et al., 2019). ER also provides students with a considerable learning edge by promoting their learning interest and motivation (Alnajjar et al., 2021). Given that students are usually drawn to tactile user interfaces and physical qualities, robot-assisted education can effectively motivate them to stay engaged in their learning activities.
Meanwhile, telepresence robots are valuable tools for facilitating remote learning (Lei et al., 2022). In education, videoconferencing has become a popular instrument that supports remote learning, especially during the COVID-19 pandemic as teachers and students transition from face-to-face lessons to online ones (Almendingen et al., 2021; World Economic Forum, 2020; Wu, 2021). A telepresence robot not only allows videoconferencing but also provides maneuverability and control over a remote camera (Jakonen & Jauni, 2021). A remote student can operate the robot from a distance to interact with people, objects and, environmental structures in the class (Lei et al., 2022).
However, students face external and internal barriers in their learning (Roslan & Halim, 2021). External barriers are beyond the control of individuals, such as their health, whereas internal barriers tend to be associated with personal attitudes (Lucas, 2020). Learners face many barriers that, when left unsolved, may lead to dropouts (Bozkurt & Akbulut, 2019). Therefore, the classroom experience of these learners should be improved to stimulate their personal growth and reflection (Wood et al., 2022). Facilitators of learning are defined as those factors that promote or enhance learning (Handrianto et al., 2021; Wood et al., 2022). These facilitators help individuals modify their habits and motivate them to overcome barriers (Handrianto et al., 2021). Hence, understanding the barriers and facilitators in learning is key to implementing changes in robot-assisted education.
A systematic mixed-studies review is particularly advantageous for a wide and encompassing research problem because this approach uses various types of data to provide a more thorough and in-depth understanding of the topic at hand by presenting other viewpoints (i.e., stories and numbers) (Hong et al., 2017). Any piece of literature can provide evidence to aid in the exploration, contextualization, generalization, or explanation of findings from other types of literature (Hong et al., 2017; Lizarondo et al., 2020; Pluye & Hong, 2014). With its breadth, a systematic mixed-studies review provides richer and more useful knowledge and insightful conclusions (Hong et al., 2017; Lizarondo et al., 2020). Robot-assisted education generally has numerous components, and mono-method reviews are less appropriate than systematic mixed-method ones in examining how these components relate and interact with one another (Heyvaert et al., 2016). As a result, these syntheses have a greater chance of influencing practice, policy, and future research.
Benitti (2012) reviewed the usage of ER in elementary, middle, and high schools and emphasized the potential contribution of robotics as an educational tool. Zhong and Xia (2020) investigated the use of robotics for teaching mathematics and identified four themes, namely, human–robot interaction, connections between mathematics and real life, pedagogical suggestions, and facility conditions. Both studies also highlighted the promising future use of ER in education. Spolaôr and Benitti (2017) quantitatively assessed the application of robots as auxillary tools in tertiary instituitions and analyzed their potential benefits in concept learning and skills improvement. Anwar et al. (2019) reviewed the use of educational robots in promoting the learning of K-12 students and identified five themes, namely, general effectiveness of ER, learning and transfer skills, creativity and motivation, diversity and broadening participation, and teachers’ professional development. They suggested that ER has the potential to support those students showing no immediate interest in science and technology. Meanwhile, Papadopoulos et al. (2020) examined the use of socially assistive robots (SARs) in pre-tertiary education and found that utilizing SARs benefits the attitudes of young children.
However, none of the above systematic reviews confirm the barriers and facilitators of robot-assisted education. A mixed-studies systematic review is particularly useful in closing this gap given that this approach considers both quantitative and qualitative evidence, thereby complimenting their respective strengths and weaknesses and resulting in a more complete review (Hong et al., 2017; Tariq & Woodman, 2013). By integrating quantitative and qualitative evidence, associated findings can be corroborated, hence improving the present understanding of the topic at hand (Almalki, 2016; Hong et al., 2017; Tariq & Woodman, 2013). Given the shortcoming in the existing literature, the current mixed-studies review aims to explore the barriers and facilitators of robot-assisted education in higher education. Hence, the following research questions (RQs) are formulated to address the objective of the present review:
RQ1: What are the barriers of robot-assisted education in higher education?
RQ2: What are the facilitators of robot-assisted education in higher education?
2 Methods
This mixed-studies review was registered with the Open Science Framework registries (https://osf.io/5e9k6). The findings of this review were obtained using both qualitative and quantitative approaches, which allow for a well-rounded analysis through integration (Hong et al., 2017; Tariq & Woodman, 2013). Pertinent findings were combined to synthesize more substantive evidence (Almalki, 2016; Hong et al., 2017; Tariq & Woodman, 2013) to obtain an in-depth understanding of the barriers and facilitators of learning among higher education students. Results were presented following the Preferred Reporting Items for Systematic Review and Meta Analyses (PRISMA) guidelines (Page et al., 2021). The PRISMA checklist can be found in Appendix A.
2.1 Eligibility Criteria
This review focuses on higher education students of any level and on the barriers and facilitators of robot-assisted education in higher education. The articles were selected following a strict eligibility criterion based on the Setting, Perspective, Intervention, Comparison, and Evaluation (SPICE) framework to ensure an efficient identification of evidence and relevant studies (Booth, 2006). The full SPICE framework and eligibility criteria can be found in Appendix B and C. Mixed-methods, quantitative, and qualitative studies were included in the review. The selected articles comprised both published and unpublished studies that were exclusively reported in English and were published in any given year to ensure the comprehensiveness of the review and to maximize the selection of articles.
2.2 Search Strategy
A three-phase search strategy was applied. First, an initial search of PubMed was carried out by the first reviewer using index terms and keywords. The text words of the retrieved studies matching the inclusion criteria were then analyzed to generate a list of keywords and index terms for a comprehensive search. After deriving the related keywords and index terms, the Boolean operators “AND” and “OR” were used to combine the search terms. An experienced librarian was consulted to facilitate the development of an extensive search strategy. Using the developed search strategy, another comprehensive search was carried out across all 10 databases, namely, PubMed, Excerpta Medica DataBASE, Cumulative Index of Nursing and Allied Health Literature, IEEE Technology Xplore, Cochrane Library, Scopus, Web of Science, Education Resources Information Center, ProQuest, and Psychological Information Database from inception to December 31, 2021. The reference lists of the included articles were examined to identify additional studies. The full search strategy can be found in Appendix D.
To enhance the quality of the database search, the Peer Review of Electronic Search Strategies (PRESS) was utilized. Specifically, the requestor (person requesting the peer review) keyed in the information in the updated PRESS 2015 Guideline Assessment Form at the “primary” search strategy. The completed form was then sent to the reviewer to evaluate the search strategy using the PRESS 2015 Evidence-Based Checklist. As no major revision was advised, a second PRESS peer review of the revised strategy was not carried out. All records from the databases were collated using the EndNote 20 software, and the duplicates were removed (The EndNote Team, 2013). Several eligibility criteria were employed in the first phase of screening for titles and abstracts. The full texts of the remaining articles were then retrieved and thoroughly reviewed.
2.3 Methodological Quality Assessment
The Mixed Methods Appraisal Tool (MMAT) version 2018 was used to critically appraise all included articles. The MMAT can be found in Appendix E. Each selected article was appraised for their (1) study design, (2) evaluation of study selection bias, (3) sample size, (4) data collection methods, (5) intervention integrity, and (6) analysis. Methodological ratings of good (75–100%), fair (50–74%), and low (0–49%) were then assigned to each study after the appraisal. Methodological quality was not considered in the study selection to increase the rigour of the synthesis by allowing the consolidation of all available evidence.
2.4 Data Extraction
Qualitative data were extracted from the qualitative studies and from the qualitative sections of the selected mixed-methods studies. The same approach was also used to extract quantitative data. All data extraction work was performed using the modified extraction tool adapted from the Joanna Briggs Institute Mixed Methods Data Extraction Form, which follows a convergent integrated approach (Lizarondo et al., 2020). This data extraction form can be found in Appendix F. The extracted data included type of methodology, objective of the study, characteristics and settings of the participants, sample size, comparators (if any), measure of outcomes, results (quantitative studies), themes (qualitative studies), and barriers and facilitators of robot-assisted education. To ensure its validity and reliability, the data extraction tool was initially piloted on six of the included studies. Two reviewers (HSC and LTT) independently carried out the selection, data extraction, and quality assessment processes. Any discrepancy was resolved through mutual discussion and consultation with a third reviewer (YL). When necessary, the authors of the original included studies were contacted to clarify doubts or to ask for additional information.
2.5 Data Synthesis and Integration
The quantitative and qualitative syntheses were carried out individually followed by an integration of the pertinent findings in this mixed-studies review, which used a results-based convergent synthesis approach (Hong et al., 2017). Given that this review included a large number of articles, the qualitative findings were analyzed via thematic synthesis, which is useful for processing large datasets and producing clear and ordered results (Booth, 2006; King, 2004). The thematic synthesis was performed in three stages, namely, (1) line-by-line text coding, (2) development of descriptive themes, and (3) generation of analytical themes. The initial inductive codes were generated via line-by-line coding (Thomas & Harden, 2008) before they were compared, categorized, and grouped into subcategories based on their commonalities. Descriptive themes were then generated. The reviewers compared these descriptive themes against the textual data to derive analytical themes. The emerging themes were finalized via a discussion among the reviewers. The quantitative findings were not subjected to a meta-analysis given the differences in the approaches adopted by the selected studies. Therefore, to address any potential heterogeneity, a narrative synthesis was performed to provide a systematic summary of the selected papers. This approach strictly followed the framework of Popay et al. (2006). The outcomes of both syntheses were then compared to integrate the qualitative and quantitative findings.
3 Results
3.1 Study Selection
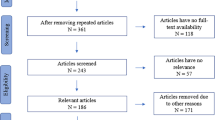
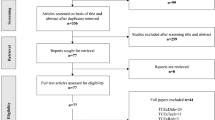
A total of 3603 articles were obtained. After removing the duplicates, 2065 articles were selected for analysis based on their titles and abstracts. Among these articles, 158 were retrieved for full-text screening, of which 28 articles (Abe et al., 2018; Aroca et al., 2013; Banaeian & Gilanlioglu, 2021; Corsby & Bryant, 2020; Cruz-Martín et al., 2012; Donnermann et al., 2020, 2021; Gleason & Greenhow, 2017; Gomez-de-Gabriel et al., 2011; Guo et al., 2014; Gyebi et al., 2017; Ibrahim et al., 2020; Kurniawan et al., 2018; Li et al., 2016; Lister et al., 2018; Molloy et al., 2016; Rosenberg-Kima et al., 2020; Sampsel et al., 2011; Scott et al., 2020; Shaw et al., 2018; Shimaya et al., 2021; Suárez-Gómez & Pérez-Holguín, 2020; Sun et al., 2017; Uzun, 2020; Ververi et al., 2020; Wang et al., 2021; Winkelmann & Eberman, 2020; Wong et al., 2021) matched the inclusion criteria and were eventually retained for this study. Figure 1 illustrates the PRISMA flow diagram.

PRISMA flow diagram
3.2 Study Characteristics
Among the 28 selected articles, 8 had a mixed-methods design, 5 were qualitative, and 15 were quantitative. The majority of these studies were conducted in the US and Europe. All of them reported outcomes related to the barriers and facilitators of robot-assisted education. The qualitative studies mostly adopted focus groups and interviews, whereas the quantitative studies used surveys and questionnaires. Table 1 presents the characteristics of the selected articles.
3.3 Methodological Quality of the Selected Studies
The methodological quality of each study design was assessed using MMAT. The majority of these articles had average to high methodological quality. A total of 10 studies had high methodological quality, 14 studies had average methodological quality, and all other studies had low methodological quality. Some qualitative studies did not provide clear descriptions of their data collection and interpretation processes, and many failed to answer the specifics of their research questions. Most of the quantitative studies used outcome-specific measurement tools but failed to describe their sampling approaches in detail. Therefore, the researchers could not confirm whether the samples of these studies were reflective of their intended population. The randomized controlled trials (RCT) did not describe their randomization processes. The majority of the mixed-methods studies used both quantitative and qualitative approaches to answer their research questions but provided limited information about the quality of both approaches. The quality assessment of each study is described in Table 2.
3.4 Qualitative Syntheses
Qualitative findings were organized into barriers and facilitators of learning. The barrier subthemes are (1) unclear verbatim verbal audio from the robot and (2) distraction from the robot gestures and appearance. Meanwhile, the facilitator subthemes are (1) enhancement of curiosity and interest, (2) increased motivation of learning, and (3) provide remote learning. Table 3 describes the qualitative syntheses in detail.
3.4.1 Barriers From Qualitative Results
BANAEIAN and Gilanlioglu (2021) highlighted the importance of having advanced listening skills to comprehend the robot. In the same vein, Rosenberg-Kima et al. (2020) stated that the robot did not have a clear voice. Gleason and Greenhow (2017), Sampsel et al. (2011), and Wong et al. (2021) argued that the robot used a poor audio technology that should be improved. Donnermann et al. (2021) reported that the robot makes loud and distractive sounds. Similarly, Corsby and Bryant (2020) stated that the movement of the robot could disrupt the class. Gleason and Greenhow (2017) and Banaeian and Gilanlioglu (2021) found that instead of focusing on the class, the students were paying attention to the robot.
3.4.2 Facilitators from Qualitative Results
AROCA et al. (2013) and Cruz-Martín et al. (2012) reported that the use of robotics in class increased the curiosity and interest of students in learning. Banaeian and Gilanlioglu (2021) identified novelty as a factor that motivated the students to learn. Similarly, Uzun (2020) found that the motivation levels of students increased after attending classes involving robots. In Corsby and Bryant (2020), Gleason and Greenhow (2017), and Shaw et al. (2018), the participants appreciated how the use of robots allowed remote learning. Coincidentally, all these studies utilized telepresence robots.
3.5 Quantitative Syntheses
The quantitative findings were organized into barriers and facilitators of learning. The barrier categories include (1) limitations in robot software development, (2) poor audio function of the robot impedes communication, (3) restricted assessment capability, (4) poor video ability of the robot, and (5) robot gestures can be a distraction. Meanwhile, the facilitator subthemes include (1) more interesting to learn, (2) higher learning motivation, (3) boost in confidence, (4) enhanced understanding of the lesson, (5) feel comfortable for learning, and (6) robot is realistic. Table 4 presents the quantitative syntheses in detail.
3.5.1 Barriers From Quantitative Results
According to Kurniawan et al. (2018), the most commonly reported issues in using robots in the class are related to debugging errors in the software, which they perceived to be a waste of time that could have been spent in delivering the lesson. Banaeian and Gilanlioglu (2021) reported that the robot could not comprehend the participants accurately if their pronunciation was incorrect or if their voice was not loud enough. Therefore, the audio ability of the robot should be improved to enhance its communication with the students. Similarly, Shaw et al. (2018) reported that more than half of the participants were facing problems with the volume and voice connection of the robot. The same problems were reported by Lister et al. (2018), who reported that the interactions between the participants and the robot were interrupted by technical problems. In Lister et al. (2018), a significant number of the participants felt that their assessment capabilities were limited by the use of the telepresence robot. The same problems were reported in Shaw et al. (2018). Shaw et al. (2018) observed a video response delay with the robot. Similarly, Winkelmann and Eberman (2020) reported that the robot had no video.
According to Donnermann et al. (2020), the students thought that the hands and arm movements of the robot were disturbing.
3.5.2 Facilitators From Quantitative Results
AROCA et al. (2013) reported that using the robot increased the interest of the participants in their learning. Kurniawan et al. (2018) and Suárez-Gómez and Pérez-Holguín (2020) obtained similar findings. Donnermann et al. (2020) found that students were more interested to learn with robot-supported tutoring, whereas Rosenberg-Kima et al. (2020) discovered that the students found the robot interesting. However, Shimaya et al. (2021) reported no significance increase in the learning interest of the students with or without the robot. Cruz-Martín et al. (2012) reported that using the robot increased the learning motivation of students in all their courses except for one. Similarly, Donnermann et al. (2021), Guo et al. (2014), and Gyebi et al. (2017) reported that students experienced a higher learning motivation due to the presence of the robot. Winkelmann and Eberman (2020) reported that the overall confidence score of the participants improved after the use of robots. Molloy et al. (2016) and Shaw et al. (2018) found that the students became more confident to meet their lesson objectives. Similar results were reported by Lister et al. (2018).
Cruz-Martín et al. (2012) and Ibrahim et al. (2020) observed an improvement in the examination scores of the students, hence suggesting that the use of the robot helped the students better understand their lesson content. Gomez-de-Gabriel et al. (2011) and Li et al. (2016) obtained similar results. Guo et al. (2014) and Suárez-Gómez and Pérez-Holguín (2020) reported that the understanding level of the students increased after the intervention with the robot. Donnermann et al. (2020) stated that the robot provided step-by-step explanations to help the students better understand their lesson. However, Shimaya et al. (2021) and Sun et al. (2017) reported no differences in the participants’ understanding of the lesson with or without the robot. The majority of the participants in Banaeian and Gilanlioglu (2021) reported that using the robot was comfortable for learning. This finding is in line with those of Donnermann et al. (2020), where the participants felt more relaxed and less pressured in the presence of the robot. Sun et al. (2017) reported similar findings. The majority of the participants in Scott et al. (2020) agreed that the scenario with the robot was realistic. This finding was in line with those of Lister et al. (2018).
3.6 Integration of Results
Five themes emerged from the integration of the quantitative and qualitative syntheses and were organized into barriers and facilitators using a results-based convergent synthesis approach. The barrier subthemes include (1) poor audio verbatim from the robot and (2) disruption and restrictions in the software and hardware of the robot, whereas the facilitator subthemes include (1) greater engagement in learning, (2) facilitation of remote learning, and (3) knowledge enhancement. Figure 2 illustrates the process of integration, whereas Table 5 shows the integration of the quantitative and qualitative studies.

Integration of quantitative and qualitative findings
4 Discussion
This mixed-studies review compiled both the quantitative and qualitative findings from 28 studies involving 1689 higher education students across 14 countries. The methodological quality of selected studies was high (35.7%), average (50%) and low (14.3%) using MMAT. A results-based convergent synthesis approach was used to identify five themes related to two barriers and three facilitators of robot-assisted education in higher education.
4.1 Poor Audio Verbatim From the Robot
The findings of this review suggest that the learning of students in higher education is affected by the poor verbatim verbal audio of the robot. This finding is in line with those of previous reviews. Unintelligible low-resolution audio can result in a degraded learning experience as students cannot comprehend what the robot is saying, and vice versa. This problem affects the communication between the students and the robot, hence creating a barrier to the learning of the former. The verbatim verbal audio of the robot should then be improved given its effects on interaction quality and the overall appeal and enjoyment of the robot (Niculescu et al., 2013).
4.2 Disruption and Restrictions in the Software and Hardware of the Robot
The findings suggest that the students face disruption and restrictions in the software and hardware of the robot. They also observe limitations in the robot software development, where they had to spent time debugging the robot during their lessons. In terms of hardware, the students were distracted by the gestures and appearance of the robot. The current hardware development of the robot also restricted the assessment capability of the students. This problem is especially prominent among healthcare students undergoing simulations with telepresence robots. This finding is consistent with those of previous reviews (Zhang et al., 2021; Zhong & Xia, 2020). Given that the robot is a novel element in class, the students are unsurprisingly distracted by the use of this technology. Meanwhile, the low-resolution video of the robot can also impede the learning experience of students, especially that of healthcare students as they cannot see their patients properly and assess their conditions.
4.3 Greater Engagement in Learning
The findings suggest that the use of robots improves the engagement of students in their learning by increasing their motivation and piquing their interest. These robots also increase the confidence of these students and encourage their class participation. These findings are in line with those of earlier studies, which suggest that robot-assisted education can engage higher education students in their learning (Chin et al., 2014; Gerecke & Wagner, 2007; McGill, 2012; Michaelis & Mutlu, 2019). According to constructivism theory, learned knowledge is influenced by what learners know and experience. Papert (1980) extended this thought by introducing the concept of constructionism, which states that learning occurs when a student produces a physical item and reflects on the motivation behind such action. The idea of constructionism is reflected in the use of robots in education (Kabátová & Pekárová, 2010). Constructionism is often adopted in the robotics curriculum, which largely involves hands-on practice, thus encouraging students to become critical thinkers and creative problem solvers. Constructionism can be used to understand the mechanism behind this theme. Traditionally, teachers are viewed as sources of knowledge for students (Dobrosovestnova, 2019). However, such perspective is rejected by the supporters of constructionism, who believe that knowledge should be viewed as instrumental. Therefore, robots can be viewed as bridges that help students understand their learning content. This argument is exemplified by Mubin et al. (2012), in which the participants studied how humans perceive speech by looking at how robots understand speech. This finding is also consistent with the constructionist hypothesis, which posits that learning is based on what students know and infer from their actual and virtual worlds. Therefore, in a constructionist learning environment, when treated as active learners, students can be effectively engaged (Li & Guo, 2015).
4.4 Facilitation in Remote Learning
The findings reveal that the use of robot-assisted education can facilitate remote learning. This finding has been confirmed in previous reviews (Yousif, 2021). The specific robot in this case is a telepresence robot, whose most monumental advantage is promoting intercontinental communication and interaction among people (Yousif, 2021). Using these robots is especially useful for employing foreign language teachers. With their wide range of employment opportunities all over the world, foreign language teachers can benefit from the use of robots, which would save them time and money in traveling to other countries. In other words, robots provide these teachers an uncompromised academic experience that is usually delivered in person.
4.5 Knowledge Enhancement
Knowledge enhancement is a result of robot-assisted education. Using robots can help students better understand their lesson content and improve their performance in examinations. These findings are in line with those of previous reviews (Michaelis & Mutlu, 2019). The mechanism behind this theme can be better understood from the lens of theory of constructivism, which posits that human learning is constructed and that learners layer new information on top of their existing knowledge (Sarita, 2017). Individuals will try to make sense of all information they perceive and will so “construct” their own meaning from such information. Therefore, by using robot-assisted education, students utilize their own understanding to comprehend their lesson content and reinforce their lesson objective. Therefore, knowledge enhancement is a positive outcome of robot-assisted education.
4.6 Strengths and Limitations
Using a three-step search procedure, studies conducted across 14 countries were identified from over 10 databases. A systematic and rigorous approach was then applied to conduct this mixed-studies review to gather high-quality evidence. A wide range of studies were included in the review to obtain a comprehensive picture of the barriers and facilitators that higher education students face while using robots in learning. The findings of this review not only contribute to the extant body of knowledge but also bolster the theories proposed by other academics. MMAT was used to critically evaluate all the selected studies, and the majority of the studies were confirmed to have high methodological quality. Despite adhering to the recommendations of data synthesis processes and the use of two independent reviewers, the credibility of the findings of this review may be influenced when low-quality studies are included. The restrictions in language present another limitation. Specifically, the inclusion of exclusively English language studies may result in the omission of some important studies. Furthermore, qualitative synthesis was carried out using only the data presented in the selected papers; therefore, the results may not be indicative of all original data. This limitation may affect how the data in this study are interpreted. Despite the vast range of robots utilized in the reviewed studies, all these studies focused on the use of robots for student teaching and learning, and the findings emphasized in this review were also found in these investigations.
5 Conclusion and Future Work
This systematic review identified barriers and facilitators of robot-assisted education in higher education. Use of robot-assisted education brought to light the role of robots in engaging students. It can be an effective and helpful teaching method by boosting the confidence of students and facilitating their remote learning. To enhance the learning of higher education students, robot-assisted education presents an alternate educational technique. It can be utilized to supplement and augment the ongoing higher education teaching arrangements. However, when utilizing robot-assisted education, the relevant technological challenges should be addressed to maintain the standards of teaching and learning. Future studies should examine the use of a specific type of robot in a comparable learning environment. Researchers should also employ highly stringent methodologies to improve the credibility of their findings and ensure the quality of their studies. More primary studies, preferably RCTs, should also be performed to further understand the barriers and facilitators of robot-assisted education. Randomization eliminates bias and provides a rigorous method for examining the cause–effect relationship between robot-assisted education and higher education students (Hariton & Locascio, 2018).
Data availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
References
Abe, S., Noguchi, N., Matsuka, Y., Shinohara, C., Kimura, T., Oka, K., Okura, K., Rodis, O. M. M., & Kawano, F. (2018). Educational effects using a robot patient simulation system for development of clinical attitude. European Journal of Dental Education : Official Journal of the Association for Dental Education in Europe, 22(3), e327–e336. https://doi.org/10.1111/eje.12298
Afari, E., & Khine, M. (2017). Robotics as an educational tool: Impact of lego mindstorms. International Journal of Information and Education Technology, 7, 437–442. https://doi.org/10.18178/ijiet.2017.7.6.908
Almalki, S. (2016). Integrating quantitative and qualitative data in mixed methods research—challenges and benefits. Journal of Education and Learning, 5, 288. https://doi.org/10.5539/jel.v5n3p288
Almendingen, K., Morseth, M. S., Gjølstad, E., Brevik, A., & Tørris, C. (2021). Student’s experiences with online teaching following COVID-19 lockdown: A mixed methods explorative study. PLoS ONE, 16(8), e0250378. https://doi.org/10.1371/journal.pone.0250378
Alnajjar, F., Bartneck, C., Baxter, P., Belpaeme, T., Cappuccio, M. L., Di Dio, C., Eyssel, F., Handke, J., Mubin, O., & Obaid, M. (2021). Robots in education: An introduction to high-tech social agents, intelligent tutors, and curricular tools. Routledge. https://doi.org/10.4324/9781003142706
Anwar, S., Bascou, N. A., Menekse, M., & Kardgar, A. (2019). A Systematic Review of Studies on Educational Robotics. Journal of Pre-College Engineering Education Research (J-PEER). https://doi.org/10.7771/2157-9288.1223
Aroca, R., Gomes, R., Tavares, D., Souza, A., Burlamaqui, A., Caurin, G., & Gonçalves, L. (2013). Increasing students' interest with low-cost cell bots. IEEE Transactions on Education, 56, 3–8. https://doi.org/10.1109/TE.2012.2214782
Banaeian, H., & Gilanlioglu, I. (2021). Influence of the NAO robot as a teaching assistant on university students’ vocabulary learning and attitudes. Australasian Journal of Educational Technology, 71–87. https://doi.org/10.14742/ajet.6130
Benitti, FB. (2012). Exploring the educational potential of robotics in schools: A systematic review. Computers and Education, 58(3), 978–988. https://doi.org/10.1016/j.compedu.2011.10.006
Booth, A. (2006). Clear and present questions: Formulating questions for evidence based practice. Library Hi Tech, 24(3), 355–368. https://doi.org/10.1108/07378830610692127
Bozkurt, A., & Akbulut, Y. (2019). Dropout patterns and cultural context in online networked learning spaces [Other Journal Article]. Open Praxis, 11(1), 41–54. https://search.informit.org/doi/https://doi.org/10.3316/informit.234278052445935
Brubacher, M., & Silinda, F. (2019). Enjoyment and Not Competence Predicts Academic Persistence for Distance Education Students. The International Review of Research in Open and Distributed Learning, 20. https://doi.org/10.19173/irrodl.v20i4.4325
Chin, K.-Y., Hong, Z.-W., & Chen, Y.-L. (2014). Impact of using an educational robot-based learning system on students’ motivation in elementary education. IEEE Transactions on Learning Technologies, 7, 333–345. https://doi.org/10.1109/TLT.2014.2346756
Corsby, C., & Bryant, A. (2020). “I felt like I was missing out on something”: An evaluation of using remote technology in the classroom. Education and Information Technologies, 25. https://doi.org/10.1007/s10639-020-10207-2
Cruz-Martín, A., Fernández-Madrigal, J. A., Galindo, C., González-Jiménez, J., Stockmans-Daou, C., & Blanco, J. L. (2012). A LEGO Mindstorms NXT approach for teaching at Data Acquisition, control systems engineering and real-time systems undergraduate courses. Computers & Education, 59. https://doi.org/10.1016/j.compedu.2012.03.026
Dobrosovestnova, A. (2019). "Constructivism in Educational Robotics. Interpretations and Challenges". https://doi.org/10.13140/RG.2.2.32197.88800
Donnermann, M., Schaper, P., & Lugrin, B. (2020). Integrating a social robot in higher education—a field study. IEEE Explore. https://doi.org/10.1109/RO-MAN47096.2020.9223602
Donnermann, M., Lein, M., Messingschlager, T., Riedmann, A., Schaper, P., Steinhaeusser, S., & Lugrin, B. (2021). Social robots and gamification for technology supported learning: An empirical study on engagement and motivation. Computers in Human Behavior, 121, 106792. https://doi.org/10.1016/j.chb.2021.106792
Gerecke, U., & Wagner, B. (2007). The challenges and benefits of using robots in higher education. Intelligent Automation & Soft Computing, 13(1), 29–43. https://doi.org/10.1080/10798587.2007.10642948
Gleason, B., & Greenhow, C. (2017). Hybrid education: the potential of teaching and learning with robot-mediated communication. Online Learning, 21. https://doi.org/10.24059/olj.v21i4.1276
Gomez-de-Gabriel, J., Mandow, A., Fernández-Lozano, J., & Garcia, A. (2011). Using LEGO NXT mobile robots with LabVIEW for undergraduate courses on mechatronics. Education, IEEE Transactions on, 54, 41–47. https://doi.org/10.1109/TE.2010.2043359
Guo, Y., Zhang, S., Ritter, A., & Man, H. (2014). A case study on a capsule robot in the gastrointestinal tract to teach robot programming and navigation. Education, IEEE Transactions on, 57, 112–121. https://doi.org/10.1109/TE.2013.2281025
Gyebi, E., Hanheide, M., & Cielniak, G. (2017). The effectiveness of integrating educational robotic activities into higher education computer science curricula: A case study in a developing country. Advances in Intelligent Systems and Computing, 560. https://doi.org/10.1007/978-3-319-55553-9_6
Handrianto, C., Uçar, A. S., Saputra, E., Nengsih, Y. K., Kenedi, A. K., & Rahman, M. A. (2021). Competences of adult learning facilitators in community service learning: a review of literatures. Kolokium Jurnal Pendidikan Luar Sekolah, 9(2), 121–132. https://doi.org/10.24036/kolokium-pls.v9i2.493
Hariton, E., & Locascio, J. J. (2018). Randomised controlled trials - the gold standard for effectiveness research: Study design: randomised controlled trials. BJOG: An International Journal of Obstetrics and Gynaecology, 125(13), 1716–1716. https://doi.org/10.1111/1471-0528.15199
Hernik, J., & Jaworska, E. (2018). The effect of enjoyment on learning. Proceedings of INTED2018 Conference, 5th–7th March 2018, Valencia, Spain, (Vol. 1, pp. 508–514). https://doi.org/10.21125/inted.2018.1087
Heyvaert, M., Hannes, K., & Onghena, P. (2016). Using mixed methods research synthesis for literature reviews. Sage. https://doi.org/10.4135/9781506333243
Hong, Q. N., Pluye, P., Bujold, M., & Wassef, M. (2017). Convergent and sequential synthesis designs: Implications for conducting and reporting systematic reviews of qualitative and quantitative evidence. Systematic Reviews, 6(1), 61. https://doi.org/10.1186/s13643-017-0454-2
Ibrahim, M. F., Huddin, A., Hashim, F., Abdullah, M., Abd. Rahni, A. A., Mustaza, S., Hussain, A., & Mohd Zaman, M. H. (2020). Strengthening programming skills among engineering students through experiential learning based robotics project. International Journal of Evaluation and Research in Education (IJERE), 9, 939. https://doi.org/10.11591/ijere.v9i4.20653
Jakonen, T., & Jauni, H. (2021). Mediated learning materials: Visibility checks in telepresence robot mediated classroom interaction. Classroom Discourse, 12(1–2), 121–145. https://doi.org/10.1080/19463014.2020.1808496
Kabátová, M., & Pekárová, J. (2010). Lessons learnt with LEGO Mindstorms: from beginner to teaching robotics. Group, 10(12), 1–6.
King, N. (2004). Essential Guide to Qualitative Methods in Organizational Research. SAGE Publications Ltd. https://doi.org/10.4135/9781446280119
Kurniawan, O., Lee, N., Datta, S., Sockalingam, N., & Leong, P. (2018). Effectiveness of physical robot versus robot simulator in teaching introductory programming. IEEE. https://doi.org/10.1109/TALE.2018.8615190
Lei, M., Clemente, I. M., Liu, H., & Bell, J. (2022). The acceptance of telepresence robots in higher education. International Journal of Social Robotics, 14(4), 1025–1042. https://doi.org/10.1007/s12369-021-00837-y
Li, J., Kizilcec, R., Bailenson, J., & Ju, W. (2016). Social robots and virtual agents as lecturers for video instruction. Computers in Human Behavior, 55, 1222–1230. https://doi.org/10.1016/j.chb.2015.04.005
Li, L., & Guo, R. (2015). A student-centered guest lecturing: A constructivism approach to promote student engagement. Journal of instructional pedagogies, 15.
Lister, M., Vaughn, J., Brennan-Cook, J., Molloy, M., Kuszajewski, M., & Shaw, R. J. (2018). Telehealth and telenursing using simulation for pre-licensure USA students. Nurse Education in Practice, 29, 59–63. https://doi.org/10.1016/j.nepr.2017.10.031
Lizarondo, L., Stern, C., Carrier, J., Godfrey, C., Rieger, K., Salmond, S., Apostolo, J., Kirkpatrick, P., & Loveday, H. (2020). Chapter 8: Mixed methods systematic reviews. In Aromataris, E., Munn, Z. (Eds.), JBI Manual for Evidence Synthesis (270–308). JBI. https://doi.org/10.46658/JBIMES-20-09
Lucas, M. (2020). External barriers affecting the successful implementation of mobile educational interventions. Computers in Human Behavior, 107, 105509. https://doi.org/10.1016/j.chb.2018.05.001
Lucey, K. (2018). The effect of motivation on student persistence in online higher education: A phenomenological study of how adult learners experience motivation in a web-based distance learning environment. (Doctoral dissertation, Duquesne University).
McGill, M. M. (2012). Learning to program with personal robots: Influences on student motivation. ACM Transactions on Computing Education (TOCE), 12(1), 1–32. https://doi.org/10.1145/2133797.2133801
Michaelis, J. E., & Mutlu, B. (2019). Supporting interest in science learning with a social robot. In Proceedings of the 18th ACM International Conference on Interaction Design and Children, 71–82. https://doi.org/10.1145/3311927.3323154
Molloy, M., Shaw, R. J., Vaughn, J., & Hueckel, R. (2016). An innovative use of telepresence robots for educating healthcare professional. Nursing Informatics, 225, 989–990. https://doi.org/10.3233/978-1-61499-658-3-989
Mubin, O., Bartneck, C., Feijs, L., Hooft van Huysduynen, H., Hu, J., & Muelver, J. (2012). Improving speech recognition with the robot interaction language. Disruptive Science and Technology, 1, 79–88. https://doi.org/10.1089/dst.2012.0010
Niculescu, A., van Dijk, B., Nijholt, A., Li, H., & See, S. L. (2013). Making social robots more attractive: The effects of voice pitch, humor and empathy. International Journal of Social Robotics, 5(2), 171–191. https://doi.org/10.1007/s12369-012-0171-x
Okada, A., & Sheehy, K. (2020). Factors and recommendations to support students’ enjoyment of online learning with fun: A mixed method study during COVID-19. Frontiers in Education, 5(1). https://doi.org/10.3389/feduc.2020.584351
Page, M. J., McKenzie, J. E., Bossuyt, P. M., Boutron, I., Hoffmann, T. C., Mulrow, C. D., Shamseer, L., Tetzlaff, J. M., Akl, E. A., Brennan, S. E., Chou, R., Glanville, J., Grimshaw, J. M., Hróbjartsson, A., Lalu, M. M., Li, T., Loder, E. W., Mayo-Wilson, E., McDonald, S., … Moher, D. (2021). The PRISMA 2020 statement: An updated guideline for reporting systematic reviews. BMJ, 372, n71. https://doi.org/10.1136/bmj.n71
Papadopoulos, I., Lazzarino, R., Miah, S., Weaver, T., Thomas, B., & Koulouglioti, C. (2020). A systematic review of the literature regarding socially assistive robots in pre-tertiary education. Computers & Education, 155, 103924. https://doi.org/10.1016/j.compedu.2020.103924
Papert, S. (1980). Mindstorms: Children, Computers, and Powerful Ideas. .
Pedler, M. L., Willis, R., & Nieuwoudt, J. E. (2022). A sense of belonging at university: Student retention, motivation and enjoyment. Journal of Further and Higher Education, 46(3), 397–408. https://doi.org/10.1080/0309877X.2021.1955844
Pluye, P., & Hong, Q. N. (2014). Combining the power of stories and the power of numbers: mixed methods research and mixed studies reviews. Annual Review of Public Health, 35(1), 29–45. https://doi.org/10.1146/annurev-publhealth-032013-182440
Popay, J., Roberts, H., Sowden, A., Petticrew, M., Arai, L., Rodgers, M., Britten, N., Roen, K., & Duffy, S. (2006). Guidance on the conduct of narrative synthesis in systematic reviews: A product from the ESRC Methods Programme. https://doi.org/10.13140/2.1.1018.4643
Rosenberg-Kima, R., Koren, Y., & Gordon, G. (2020). Robot-Supported Collaborative Learning (RSCL): Social robots as teaching assistants for higher education small group facilitation. Frontiers in Robotics and A, I, 6. https://doi.org/10.3389/frobt.2019.00148
Roslan, N. S., & Halim, A. S. (2021). Enablers and Barriers to Online Learning among Medical Students during COVID-19 Pandemic: An Explanatory Mixed-Method Study. Sustainability, 13(11). https://doi.org/10.3390/su13116086
Rump, M., Esdar, W., & Wild, E. (2017). Individual differences in the effects of academic motivation on higher education students’ intention to drop out. European Journal of Higher Education, 7(4), 341–355. https://doi.org/10.1080/21568235.2017.1357481
Sampsel, D., Bharwani, G., Mehling, D., & Smith, S. (2011). Robots as faculty: student and faculty perceptions. Clinical Simulation in Nursing, 7(6), e209–e218. https://doi.org/10.1016/j.ecns.2010.02.009
Sarita, P. (2017). Constructivism: A new paradigm in teaching and learning. International Journal of Academic Research and Development, 2(4), 183–186.
Scott, A., Dawson, R. M., Mitchell, S., & Catledge, C. (2020). Simulation-based interprofessional education in a rural setting: the development and evaluation of a “Remote-In” Telehealth Scenario. Nursing Education Perspectives, 41(3), 187–189. https://doi.org/10.1097/01.Nep.0000000000000461
Shaw, R. J., Molloy, M., Vaughn, J., Crego, N., Kuszajewski, M., Brisson, R., III., & Hueckel, R. (2018). Telepresence robots for pediatric clinical simulations: Feasibility and acceptability. Pediatric Nursing, 44(1), 39–43.
Shimaya, J., Yoshikawa, Y., Ogawa, K., & Ishiguro, H. (2021). Robotic question support system to reduce hesitation for face-to-face questions in lectures. Journal of Computer Assisted Learning, 37. https://doi.org/10.1111/jcal.12511
Souza, I. M. L., Andrade, W., Sampaio, L. M. R., & Araujo, A. L. (2018). A systematic review on the use of LEGOÆ robotics in education. IEEE Frontiers in Education Conference (FIE), 2018, 1–9. https://doi.org/10.1109/FIE.2018.8658751
Spolaôr, N., & Benitti, F. B. V. (2017). Robotics applications grounded in learning theories on tertiary education: A systematic review. Computers & Education, 112, 97–107. https://doi.org/10.1016/j.compedu.2017.05.001
Suárez-Gómez, A.-D., & Pérez-Holguín, W. J. (2020). Physical visualization of math concepts using LEGO Mindstorms. JOTSE: Journal of Technology and Science Education, 10(1), 72–86. https://doi.org/10.3926/jotse.788
Sun, Z., Li, Z., & Nishimori, T. (2017). Development and assessment of robot teaching assistant in facilitating learning. In: 2017 International Conference of Educational Innovation through Technology (EITT), 165–169. https://doi.org/10.1109/EITT.2017.47
Tariq, S., & Woodman, J. (2013). Using mixed methods in health research. JRSM Short Reports, 4(6), 2042533313479197. https://doi.org/10.1177/2042533313479197
The EndNote Team. (2013). EndNote. In (Version EndNote 20) [64 bit]. Clarivate.
Thomas, J., & Harden, A. (2008). Methods for the thematic synthesis of qualitative research in systematic reviews. BMC Medical Research Methodology, 8(1), 45. https://doi.org/10.1186/1471-2288-8-45
Uzun, A. (2020). Using Educational robotics as a cognitive tool for ICT teachers in an authentic learning environment. International Education Studies, 13, 27. https://doi.org/10.5539/ies.v13n4p27
Ververi, C., Koufou, T., Moutzouris, A., & Andreou, L. V. (2020). Introducing robotics to an english for academic purposes curriculum in higher education: the student experience. In 2020 IEEE Global Engineering Education Conference (EDUCON), 20–21. https://doi.org/10.1109/EDUCON45650.2020.9125290
Wang, W., Coutras, C., & Zhu, M. (2021). Empowering computing students with proficiency in robotics via situated learning. Smart Learning Environments, 8. https://doi.org/10.1186/s40561-021-00167-6
Winkelmann, Z., & Eberman, L. (2020). The confidence and abilities to assess a simulated patient using telemedicine. Athletic Training Education Journal, 15, 132–147. https://doi.org/10.4085/1947-380X-62-19
Wong, L., Tokumaru, S., Boehm, L., Young, N., Todoki, S., Meguro, A., Thai, L., Loos, J., & Masaki, K. (2021). From a distance: Nursing and pharmacy students use teamwork and telehealth technology to provide interprofessional care in a simulation with telepresence robots. Journal of Interprofessional Education & Practice, 22, 100407. https://doi.org/10.1016/j.xjep.2020.100407
Wood, A. K., Christie, H., MacKay, J. R. D., & Kinnear, G. (2022). Using data about classroom practices to stimulate significant conversations and aid reflection. International Journal for Academic Development, 1–14. https://doi.org/10.1080/1360144X.2022.2103817
World Economic Forum. (2020). The COVID-19 pandemic has changed education forever. This is how. https://www.weforum.org/agenda/2020/04/coronavirus-education-global-covid19-online-digital-learning/
Wu, S.-Y. (2021). How teachers conduct online teaching during the COVID-19 pandemic: A case study of Taiwan. Frontiers in Education, 6(184). https://doi.org/10.3389/feduc.2021.675434
Yamashita, T., Smith, T. J., Sahoo, S., & Cummins, P. A. (2022). Motivation to learn by age, education, and literacy skills among working-age adults in the United States. Large-Scale Assessments in Education, 10(1), 1. https://doi.org/10.1186/s40536-022-00119-7
Yousif, J. (2021). Social and telepresence robots a future of teaching. Artificial Intelligence & Robotics Development Journal, 58–65. https://doi.org/10.52098/airdj.202124
Zhang, Y., Luo, R., Zhu, Y., & Yin, Y. (2021). Educational robots improve K-12 Students’ computational thinking and STEM attitudes: systematic review. Journal of Educational Computing Research, 59(7), 1450–1481. https://doi.org/10.1177/0735633121994070
Zhong, B., & Xia, L. (2020). A systematic review on exploring the potential of educational robotics in mathematics education. International Journal of Science and Mathematics Education, 18(1), 79–101. https://doi.org/10.1007/s10763-018-09939-y
Funding
No funding supports the review.
Author information
Authors and Affiliations
Contributions
HSC: Conceptualization, Methodology, Software, Formal analysis, Visualization, Writing—original draft. LTT: Methodology, Formal analysis, Investigation, Validation, Writing—review & editing. HSJC: Conceptualization, Methodology, Formal analysis, Investigation, Writing—review & editing, YL: Conceptualization, Methodology, Validation, Formal analysis, Investigation, Writing—review & editing.
Corresponding author
Ethics declarations
Conflict of interest
The authors report no declarations of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Chou, H.S., Thong, L.T., Chew, H.S.J. et al. Barriers and Facilitators of Robot-Assisted Education in Higher Education: A Systematic Mixed-Studies Review. Tech Know Learn 28, 477–516 (2023). https://doi.org/10.1007/s10758-022-09637-3
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10758-022-09637-3