
Abstract
Due to technological and safety limitations, there are considerable amounts of coal resources pressed under end slopes in open-pit coal mines. In recent years, this problem has gradually attracted the attention of researchers. How to realize the efficient recovery of side overburden resources while ensuring the stability and safety of slopes has become an important topic for the development of mining technology in China. A 2D/3D integrated simulation experimental device for end slope coal mining is developed. Based on the geological engineering conditions of the Ordos mining area in China, a typical geological engineering model of a near-horizontal slope condition is constructed to simulate the whole process of “roadway group formation—supporting coal pillar failure—slope rock mass instability”. By tracking and monitoring the movement and failure processes of slope rock masses in an end-slope mining field, the yield failure characteristics of coal pillars and the movement and deformation laws of slope rock masses are revealed, and the deformation and failure zoning method of overburden rock in an end-slope mining field is proposed; in addition, the key stages, trigger conditions and key positions of slope deformation and instability are defined. The results show that under the coupling action of the “slope stress field” and “roadway group stress field”, the actual stress of a supporting coal pillar in the deep part of a geometric centre along the slope of a roadway group is greater than the ultimate stress, and then large discontinuous deformations of multiple adjacent coal pillars around the central coal pillar are caused by compressive shear failure, which is the triggering condition of deformation and instability around the mining slope. The key position of yield failure of the supporting coal pillar is located in the deep part of the geometric centre along the slope of the roadway group. At the end of the mining adit, the supporting coal pillar within a width of 2.5–3 times the mining adit will not be destroyed. The boundary of the final collapse plane range of the roadway group is approximately a closed curve formed by two paraboloids, which are axisymmetric with the central pillar and open oppositely; the parabola opening in the shallow part of the slope area is small, and the parabola opening in the deep part of the slope area is large. There is a significant space–time correspondence between the failure of supporting coal pillars and the deformation of the slope surface. According to the failure process of the rock mass structure and the movement and deformation characteristics of the slope surface, the slope after failure can be divided into three areas, and the upper part of the slope is the key area of deformation and instability of the overlying rock mass in the end-slope mining field. These research results provide a theoretical basis for the scientific monitoring and stability control of slopes in an end-slope mining field.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
By 2020, there were approximately 420 open-pit coal mines in China, accounting for 7% of the total number of Chinese coal mines, with a production capacity of 950 million tons, accounting for 18.6% of the total coal production capacity in China. Restricted by mining technology, stripping ratios, slope safety and other factors, there are vast amounts of slope compaction resources in open-pit mining areas in China (Runcai et al. 2014; Zhi et al. 2013). The main reasons for these immense resources can be attributed to two factors. First, most open-pit coal mines in China adopt zone mining methods, and trucks are transported along the loop line of the end slope and the inner dump overburden side slope. To ensure the stability of the slope, the overall range of the slope angle is only 20°–35° under normal circumstances is common sense in China. After lateral exposure, the coal seam covered by the slope is buried again by the inner dump and leads to a permanent loss. This resource loss phenomenon is more prominent in open-pit mines with seamless mining rights. Second, when open-pit mining is advanced to deep areas, the stripping ratio increases sharply, restricted by economic factors, and a large amount of coal covered by the end slope cannot continue to be mined by open-pit mining. According to this investigation, there are eight open-pit coal production bases and 40 open-pit mining areas in China, and more than half of the mining areas have more than 100 Mt of end slope pressing coal. In the Pingshuo mine area alone, the amount of resources covered by the boundary slope is approximately 0.1 billion t/km. Considering the Ordos coal field as an example, 157 open-pit coal mines are clustered; however, the area of a single open-pit mine is relatively small, its shape is irregular, and the amount of coal compressed by the blank area among mines, safety pillars, side coal and corner coal exceeds 500 million tons (Chunjie 2012). This large amount of resources covered by boundary slopes contributes to invisible energy waste and economic losses to the national economy.
With dwindling coal resources and advances in mining technology, the problem of resources covered by boundary slopes in open-pit mines has gradually attracted attention in recent years, and how to efficiently recover these resources and minimize the waste of coal resources has become an important topic for the development of open-pit mining technology in China (Chong et al. 2011). Of the many end-slope coal mining technologies, end shearer mining technology has been popularized and applied in countries such as the United States, Russia, and India. Because this approach lacks separate stripping or infrastructure, mining equipment is directly laid at the exposed position of the coal seam on the side of an open-pit mining site, and the whole mining process, without support, exhibits a high recovery rate, low cost, good safety, strong adaptability and other characteristics (Mo et al. 2016; Porathur et al. 2013, 2014). Industrial tests have been performed at more than 10 mines in China (Wengang and Leishi 2012; Shuai et al. 2016). Under the premise of minimal disturbance to the ecological and geological environment, a large number of stagnant resources were recovered due to contributions to ecological protection and the high-quality development of coal mining areas in the middle and lower reaches of the Yellow River Basin. Mining coal resources with this technology is carried out in the open pit, which has not realized internal drainage; its essence is the process of mining roadway groups in the lower slope perpendicular to the slope trend, as the rock and soil weight of the upper slope are borne by the support coal pillar between the roadway during the whole mining process; if this is not controlled properly, it will very likely cause the failure of the coal pillar and induce slope instability (Yong et al. 2006). To ensure the safety of the slope under the premise of achieving maximum coal production, it is important to understand the rock mass movement failure law and deformation instability mechanism of the end-slope mining field under the coupling effect of “open-pit mining” and “roadway mining”. The key is to use a reasonable size of supporting coal pillars in mining roadway groups. Many domestic and international scholars have carried out studies on suitable assessment methods for end-slope coal mining (Seib 1992; Shen and Duncan-Fama 2001; Elmouttie and Karekal 2017), mining roadway group construction technology and equipment (Ross et al. 2019; Luo et al. 2001), recovery parameter design (Porathur et al. 2013) and criteria for coal pillar stability (Porathur et al. 2014; Chen and Wu 2016; Adhikary et al. 2002). These research results have provided a basis for the scientific guidance of actual production; however, at present, studies on the migration law of overlying rock masses of end-slope mining fields have focused on underground mining (Qian and Xu 2019) or open–underground combined mining (Sun and Wang 2000; Ding et al. 2016, 2020). Relatively few studies have addressed the failure process of coal pillars in end-slope mining fields and the deformation and movement laws and instability mechanisms of slope rock masses induced by coal pillar instability; the majority of the research methods are numerical analyses. Ghabraie et al. (2015); Sun et al. (2011) compared and analysed the application status of physical simulations and numerical analyses in mining engineering and concluded that physical simulations have obvious advantages in the study of strata movements, fracture propagations, collapse failures and the gradual development of overburden deformation to the surface. The methods of similar material simulation, experimental model construction, material selection and data acquisition were systematically summarized. Li et al. (2005); Weishen et al. (2011) successfully realized the excavation of a complex cave under high-fidelity conditions by combining numerical analyses and physical simulations and obtained satisfactory test results. Jianming et al. (2009); Ding et al. (2013, 2014) conducted theoretical analysis and a simulated experimental study on rock mass deformation and failure mechanism under the coupling action of “key stratum” and conducted a comparative study on the difference of slope deformation and failure influenced by mining along and against a slope dip in the recovery process of coal resources depressed by end slopes in open-pit mines. Their study provided a basis for the optimization of temporal and spatial relations. They showed that a physical model experiment is an important method for studying the underground excavation-induced movement and failure of overlying strata in the field of mining and geotechnical engineering, which can more accurately reproduce the whole deformation and failure process of a geologic body and can reflect the state of the occurrence and development of discontinuous deformation of a rock mass. The method has the characteristics of a simple process, a visual, clear and direct effect, a short cycle, a quick effect, and repeated experiments. According to different research conditions, it has significant advantages in studying rock fracture failure, rock mass deformation and stress distribution evolution. In this paper, based on similarity theory, a 2D/3D integrated simulation experiment model of similar materials in end-slope mining fields of open-pit mines is constructed based on the research background of coal mining in the Ordos area of China. The whole process of “formation of mining roadway groups—failure of supporting coal pillars—instability of slope rock mass” is simulated. By monitoring the full depth failure of a coal pillar and the surface movement and deformation of a slope, the formation process and evolution law of an “enlarged pressure arch” in overlying rock masses of mining roadway groups are revealed. Based on the experimental results, the deformation and failure division of the rock mass and the stage division of the moving failure process are carried out, and the key stages, trigger conditions and key positions of slope deformation and failure are proven, which provides a theoretical basis for the slope stability control of an end-slope mining field in an open-pit mine.
2 General Situation of Regional Engineering Geology
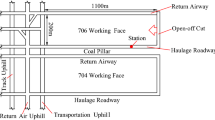
The Ordos coal field is the largest multiperiod coal field in China and one of the largest coal fields in the world. The coal field spans Shaanxi, Gansu, Ningxia, Inner Mongolia and Shanxi Provinces and covers 400 km from east to the west and 600 km from north to south. The plane of the coal field is slightly rectangular. The coal seam in the area has a stable occurrence, shallow burial, simple engineering geology and hydrogeology conditions and is suitable for open-pit mining. Therefore, there are many open-pit coal mines, resulting in a vast amount of overburden resources under the end slopes. When considering an open-pit mine in Ordos for which end-slope coal mining has been carried out, the geological engineering conditions and mining conditions can be described as follows: (1) Two coal seams, No. 6 and No. 9, are overlaid by the end side slope; the thickness of the coal seam ranges from 14–17 m to 4–10 mm. The No. 9 coal seam is located in the lower part; the distance between the two coal seams is 12–16 m; the false roof of the coal seam predominantly consists of clay rock, mudstone and sandy mudstone; the indirect roof is medium- to fine-grained sandstone; the bottom plate mainly comprises sandy mudstone; and the rock layers of the slope are hard to semihard rock. (2) The single step height of the end slope ranges from 12 to 15 m; the slope angle of the single step ranges from 60° to 70°; the overall slope height ranges from 150 to 1180 m; the slope angle ranges from 35° to 38°; the thickness of the Quaternary loose stratum ranges from 40 to 60 m; the slope mass and joint height range from 150 to 180 m; and the slope stability is good. (3) First, an EML340-type side shearer is employed for mining the No. 9 coal seam, and the tunnel section is square. The height of the tunnel is equal to the thickness of the coal seam; the maximum depth is 240 m, and the width of the supporting coal pillar is 3.5 m. There is no support throughout the mine. After the working face of the No. 9 coal seam is advanced to a certain distance, the inner dump will follow up and backfill to the floor elevation of the No. 6 coal seam in time to prepare for the recovery of the coal seam. The typical engineering geological model of the end-slope mining field in the study area is shown in Fig. 1.

Typical engineering geological model of the end slope
3 Development of an End-Slope Coal Mining Simulation Experimental Device and Experimental Design
3.1 Development of the Simulation Experiment Device
Similar material simulation experiments commonly utilized in geomechanics and mining engineering can be divided into two types: two-dimensional experiments and three-dimensional experiments. Two-dimensional experiments are often employed to reveal the deformation and stress distribution characteristics of typical geological sections. The work is small in scale and economical, but the experimental results are often one-sided due to stress and boundary conditions. Three-dimensional experiments can obtain stress and deformation parameters over a full range with obvious defects, such as invisible deformation and failure processes in rock masses. The deformation and instability of end-slope mining fields in open-pit mines is a typical problem with a three-dimensional space–time relationship. To determine whether the simulation results can complement and verify each other by simultaneously carrying out two-dimensional and three-dimensional experiments and to more scientifically reproduce the whole process of “formation of mining cave group—failure of support coal pillars—instability of slope rock mass” to address the abovementioned problems, a simulation experimental device for end-slope coal mining is developed on the basis of analysis.
3.1.1 Design of the Experimental Platform
The experimental platform is a steel frame structure with a total weight of approximately 2.4. The platform is composed of a 2D simulation experiment area and a 3D simulation experiment area with dimensions of 1750 × 250 × 1200 mm and 1450 × 1750 × 1200 mm, respectively (Fig. 2). The bottom of the platform is a steel plate with a thickness of 10 mm, and the lateral constraints are plexiglass plates with a thickness of 20 mm, which are bolted to the experimental bench. The higher strength provides effective lateral constraints for the model, and the improved transparency is conducive to the collection and acquisition of experimental data. The glass panels on the front and rear sides of the 2D experimental area can be moved back and forth by adjusting the handwheel to realize the rapid addition and release of lateral constraints. The glass panel on the left side of the 2D experimental area and the glass panel in front of the 3D experimental area can be removed freely to create conditions for model excavation. Before the experiment, the constraints around the experimental platform were first installed and fixed, and the distance between the front and rear glass panels in the 2D simulation experiment area was adjusted to an appropriate position by adjusting the handwheel. The model was built layer by layer according to the similarity ratio. After the masonry work was completed, the glass panel on the left side of the 2D simulation experiment area and the glass panel on the front of the 3D simulation experiment area were removed. Simultaneously, the handwheel was adjusted to remove the constraints on the front and rear sides of the 2D simulation experiment area, and excavation and data collection were conducted after the simulated materials reached the predetermined strength.

Diagram of the 2D/3D integrated simulation experimental platform of coal extraction in the end slope
3.1.2 Design of Roadway Group Construction Device
To simulate the sequential excavation of roadway groups, a mining construction device is designed and developed on the basis of the experimental platform (Fig. 3). The device includes two parts: a movable bracket and an impact shovel. The impact shovel is composed of a shovel handle and shovel head, which are made of steel. The cross-sections are square, the two sections are welded along the central axis, and the angle between the diagonal lines of the two sections is 45°. The shovel head is bevelled to form the shovel mouth, the four edges of the shovel mouth are polished to form the blade, and the side length of the shovel mouth can be flexibly configured as needed. The impact shovel is placed horizontally on the support with 3 groups of bearings. By adjusting the angle and distance between the two bearings in each set, the impact shovel can move back and forth along a degree of freedom (horizontal direction) without falling off under the action of external forces, and the height of the bracket can be adjusted by a height adjustment device. Using this device, a series of square roadway groups perpendicular to the slope trend can be constructed horizontally at the specified height of the model. The device has the advantages of flexible position adjustment; the construction precision is controllable, and the stress evolution characteristics of the surrounding rock are similar to the actual situation in the whole construction process.

Diagram of roadway construction device
3.2 Experimental Design and Model Construction
The self-developed 2D/3D integrated simulation experiment device is employed in this experiment. The mechanical property parameters and delamination thickness of the slope rock mass required by the experiment are shown in Table 1. Based on the engineering geological conditions of the study area and the size of the experimental platform, the similarity ratio parameters of the model are determined, as shown in Table 2. Clean fine sand is selected as the aggregate, and lime, gypsum and water are selected as cementing materials. Based on the physical and mechanical properties of the slope rock mass, the material ratio of each rock layer in the model is determined through a uniform experiment, as shown in Table 3. According to the distribution characteristics of the stratum and the ratio of similar materials, the model is laid horizontally layer by layer through mixing, paving and compaction. To achieve a better layering effect, the compaction thickness of a single layer is controlled between 1 and 2.75 cm, and mica powder is used to separate the layers. Considering the influence of the coal seam floor on the stability of the supporting coal pillar and the integrity of the system of “underlying strata—mining roadway groups—overlying strata” in the end-slope mining field, the model should be laid at a depth of 100 mm below the coal floor, and it should be as smooth as possible. The model sizes are 1750 × 250 × 930 mm and 1450 × 1750 × 930 mm.
3.3 Model Excavation and Data Acquisition
3.3.1 Model Excavation Sequence and Mining Parameters
After the model material reaches the predetermined strength, the end slope is formed by open-pit mining, and the overall slope angle is 35°. Displacement monitoring targets are then laid on the surfaces of the 2D and 3D models. The 2D model displacement monitoring grid is laid at 150 × 80 mm, and the 3D model targets are laid on the surface of each platform and slope body (Fig. 4). The recovery of coal seam No. 9 is then simulated. A total of 9 mining roadways are laid out in the 3D model, and homemade construction devices are utilized for mining roadway construction from right to left, with sizes of 50 × 50 × 1200 mm. The end of the roadway is located at the orthographic projection position of the top line of the slope at coal seam No. 9, and the width of the supporting coal pillar is 30 mm. To reduce the boundary effect, a 380 mm boundary coal pillar is installed on the left and right sides of the model. The roadways are numbered from 1 to 9, and the numbers of supporting coal pillars are numbered from I to VIII. The numbers of mining roadways and coal pillars are shown in Fig. 5. According to the effective zone theory, after the 2D model is excavated to form a slope, first, the front and back sides of the coal seam are mined out, and only one central coal pillar is retained, with an initial width of 50 mm. The width of the coal pillar is gradually reduced by a gradient of 5 mm from both sides from outside to inside until the coal pillar reaches the bearing limit and compression failure occurs. The excavation design of the 2D model is shown in Fig. 6. The marked units in Figs. 5, 6, 7, 8, and 9 are mm.

Diagram of the monitoring point layout in the model section (Units: mm)

Numbered diagram of roadway and coal pillar (Units: mm)

Excavation diagram of the 2D model (Units: mm)

Diagram of the initial placement of the miniature camera (units: mm)

Yield failure characteristics in the typical position of the coal pillar about the roadway group

Diagram of the yield failure position of the supporting coal pillar (Units: mm)
3.3.2 Data Collection Methods and Implementation Steps
A panoramic-phase 3D laser scanner, high-resolution digital camera and deep-space microimaging system are employed to monitor the whole process of slope deformation and failure.
-
(1)
In the panoramic phase, a 3D laser scanner is used to carry out real scene scanning on the model surface at different stages to obtain mass point cloud data of the object surface with high precision. The measurement accuracy is 0.001 mm. Combined with the supporting point cloud processing software, the movement and deformation characteristics of the slope surface are obtained by comparing the two measured datapoints before and after mining construction. In the whole process of the experiment, three panoramic scanning measurements are carried out on the surface of the 3D model slope. The scanning time is before mining roadway construction, after every 2 mining roadways are completed and the deformation is stable, and after all mining roadways are completed and the deformation is stable.
-
(2)
Based on multiangle tilt photogrammetry technology, high-resolution digital cameras are utilized to collect high-resolution images of two-dimensional models from different angles. A high-resolution orthophoto image of the model surface is then obtained through feature matching and extraction, encryption calculation and other steps. The movement and deformation characteristics of the overlying rock mass are obtained by comparing the points with the same name in different states. The frequency of high-resolution image acquisition is mainly determined by combining with the failure process of the upper rock mass of the supporting coal pillar.
-
(3)
A deep-space microimaging system is selected to track and monitor the failure and instability process of supporting coal pillars between two mining roadways, to obtain the initial position of collapse failure and its interlocking failure characteristics of supporting coal pillars about mining roadways, and to determine the space–time corresponding relationship between the development process of coal pillars and the movement and deformation of slope surface. When each roadway reaches the predetermined depth, the microcamera is engaged immediately. When each mining roadway reaches the predetermined depth, the microcamera is engaged immediately. The equipment has its own light source, a 160° wide angle and wireless transmission, so continuous observations of surrounding rock deformations and failure within 40 cm can be realized. With the continuous construction of the mining roadway, the installation and debugging of 9 pieces of equipment has been completed successively and numbered from A to I. The camera angles of A, C, E, G and I are towards the tunnel entrance, while the camera angles of B, D, F and H are towards the tunnel. During the experiment, the back-and-forth movement along the axial direction of the roadway can be realized through the support rail. All image data can be displayed at the same terminal. Through online observation and graph comparison, the initial position and time of collapse failure of each supporting coal pillar can be obtained and recorded, and the failure range of the coal pillar group along the slope strike and inclination can be delineated accurately. The initial placement of the microcamera is shown in Fig. 7.
4 Coal Pillar Yield Failure and Slope Rock Mass Movement and Deformation Law of the End-Slope Mining Field
4.1 Yield Failure Characteristics of Supporting Coal Pillars in Roadway Groups
4.1.1 Chain Failure Characteristics of the Coal Pillar
The yield failure characteristics in the typical position of the coal pillar about the roadway group in the whole process of the 3D model experiment are shown in Fig. 8. Observations show that during the construction of the No. 1 to No. 3 mining roadways, no obvious compression deformation occurred in any coal pillar (Fig. 8a, b). In the construction process of the No. 4 roadway, the No. II and No. III coal pillars begin to be successively deformed at depths of 203 m and 198 m. With the subsequent construction of the roadway, the number of coal pillars with compression deformation gradually increases, and their magnitude expands significantly. When the construction of the No. 7 roadway is finished, the yield deformation of the No. IV coal pillar is significantly aggravated, and large pieces appear on both sides of the roadway (Fig. 8c, d). At the end of roadway construction No. 8, coal pillar IV is the first to collapse at a depth of 196 m (Fig. 8e, f), and the No. III and No. V coal pillars on both sides of the roadway are immediately damaged by a chain reaction. In the construction process of the No. 9 roadway, the collapse range of the coal pillar group is further expanded around the location of the No. IV coal pillar, and the deformation of the overlying rock mass gradually develops to the surface. Along the slope direction, the coal pillar collapse spread to the No. II and No. VII coal pillars. Along the slope tendency, the failure range of each coal pillar is enlarged, but the distance between the failure boundary of the deep region and the end of the roadway is similar, and the value is in the range of 25–30 m. Among all the coal pillars, the collapse range of the No. IV coal pillar in the middle is the largest, at approximately 59.3 m. The boundary of the final collapse plane range of the roadway group is approximately a closed curve formed by two paraboloids, which are axisymmetric with the No. IV coal pillar and open oppositely; the parabola opening in the shallow part of the slope area is small, and the parabola opening in the deep part of the slope area is large. During this experiment, the earliest collapse failure occurred in coal pillar No. IV, which is located in the geometric centre along the slope strike. The failure of this coal pillar induces the chain failure of other coal pillars on both sides.
Therefore, the key position of yield failure of the supporting coal pillar is located in the deep part of the geometric centre along the slope of the roadway group. At the end of the roadway, the supporting coal pillar within the width of 2.5–3 times the roadway will not be destroyed. The triggering condition of slope deformation and failure is under the combined action of dynamic and static loads. The actual stress of the supporting coal pillar in the deep part of the geometric centre along the slope of the mining roadway group is greater than the ultimate stress, and then large discontinuous deformation of multiple adjacent coal pillars around the central coal pillar is caused by compressive shear failure. A diagram of the yield failure position of the supporting coal pillars is shown in Fig. 9.
4.1.2 Failure Characteristics of Coal Pillars Along the Slope Tendency
The deformation and failure characteristics of the supporting coal pillar and overlying rock in the 2D model experiment show that when the width of the coal pillar is gradually reduced to a 6 m by 1 m gradient from the front and back sides of the model, the coal pillar collapses suddenly in the middle and deep regions because it has reached the ultimate strength under load, and the length of the failure range rapidly expands to 65 m along the slope tendency. However, no damage occurred from the deep area to the end of the mining roadway, which comprises a length of approximately 23 m. The overlying rock mass sinks immediately after pillar collapse, and the cracks and deformation rapidly spread to the surface. It can be seen from the comparative analysis that the yield failure characteristics of the supported coal pillar observed in the 2D/3D model experiments are similar, that coal pillar collapse occurs in the middle and deep parts of the slope tendency and that there is no damage at the end of a certain length range (Fig. 10). The results of the numerical analysis show that the vertical stress of the supporting coal pillar shows obvious regularity with different depths. From the outside of the roadway, the maximum vertical stress of the coal pillar increases linearly with an increase in tunnel depth, and the peak value reaches approximately 4.7 MPa at a roadway depth of 195 m. As the depth continues to increase, the stress value decreases sharply. When it goes beyond the end of the roadway to a certain distance, it gradually decreases to the original rock stress. The coal pillar failure area is located at depths in the range of 150–215 m of the mining roadway. The numerical analysis shows that the length of the undamaged area at the end of the coal pillar is approximately 25 m, 2.5 times the width of the mining roadway, which is consistent with the model experimental results (Ding et al. 2021). A curve showing the changes in the vertical stress of the coal pillar with the depth of the roadway is shown in Fig. 11.

Yield failure characteristics of the coal pillar about the mining slope

Vertical stress curve of the supporting coal pillar varies with mining depth
4.2 Temporal and Spatial Correspondence Between Coal Pillar Failure and Slope Surface Deformation
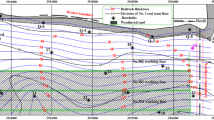
A diagram of the spatial correspondence between the coal pillar failure zone and the slope surface deformation zone is shown in Fig. 12. As shown in the graph, the deformation of the slope surface is caused by the failure of the coal pillar in the end-slope mining field, and there is an obvious space–time correspondence between them. In time, after the chain failure of the supporting coal pillar, the upper rock mass collapses, and the deformation gradually develops to the surface. A vertical deformation concentration area with an elliptical shape is formed in the geometric centre along the strike of the slope, and the long axis extends along the slope. The hinged structure formed as the rock sinks creates a horizontal thrust on the lower slope rock mass, resulting in horizontal deformation towards the open surface, while the upper slope body deforms along the slope due to the loss of lateral support, and the deformation process is relatively slow. Spatially, compared with the collapse area of the supporting coal pillar, the vertical subsidence basin in the middle of the slope deviates towards the free face. Under these experimental conditions, the centre of the subsidence basin is located at the surface of the shallow boundary of the coal pillar failure area. The main reason is that due to the coupling effect of the stress field of the “slope” and “mining roadway group”, the stress is released in advance in the relatively thin area of the overlying rock mass during the process of rock mass deformation and failure extending to the surface. The deformation and failure characteristics of the rock and soil mass of the mining slope are shown in Fig. 13. The black arrow in the figure is the rock mass deformation vector. We intuitively determine the movement and deformation of the rock and soil mass of the slope. The influence range of end slope coal mining on the slope reaches approximately 100 m beyond the top line of the slope. The subsidence deformation of the rock mass shows obvious deviation towards the free face of the slope during the process of upwards expansion. The results of the physical simulation and numerical analysis show agreement with the field monitoring data. The spatiotemporal correspondence between the failure of coal pillars and the surface deformation of the slope provides a theoretical basis for the monitoring and stability control of slope deformation.

Diagram of the spatial correspondence between the coal pillar failure zone and the slope surface deformation zone

Deformation and failure characteristics of the rock and soil mass of the mining slope
The surface deformation cloud atlas of the slope surface and the typical monitoring point deformation curve obtained by physical simulation are shown in Figs. 14 and 15, respectively. As shown in the graph, in the middle region, the slope surface is dominated by vertical deformation with a magnitude of approximately 0.38 m, while in the lower region, the slope surface is dominated by horizontal deformation with a magnitude of approximately 0.20 m. However, the horizontal deformation and vertical deformation on the upper slope surface are both significant with magnitudes of approximately 0.36 m and 0.32 m, respectively.

Cloud image of slope surface deformation (unit: cm)

Deformation curve of typical displacement monitoring points on the slope surface
4.3 Deformation and Failure Zones of the Overlying Rock Mass and Slope Surface
The yield failure characteristics of the coal pillar in the end-slope mining field determine the movement and deformation characteristics of the overlying rock mass and the surface of the slope. The comprehensive analysis shows that under the condition of near-horizontal strata, the deformation and failure of the slope rock mass show obvious zoning characteristics under the influence of roadway construction. The overlying rock mass of the slope can be divided into three zones, A, B and C, by the fracture boundary of the moving basin and the boundary of the separation range (Fig. 16).
-
(1)
Zone A is located outside the fracture boundary of the moving basin at the bottom of the slope; the rock mass in this area is subjected to the horizontal thrust caused by key block rotary instability and sliding instability of zone B. It is easy to move horizontally towards the open surface of the slope; the rock mass in this area is mainly horizontal deformation, and local collapse and instability are very likely to occur, which is the key area for the deformation and instability of the mining slope.
-
(2)
Zone B is located directly above the failure zone of the supporting coal pillar, between the fracture boundary of the moving basin on the lateral side of the slope and the boundary of the separation range inside the slope. This area is formed gradually due to the collapse of the supporting coal pillar and the settlement deformation of the overlying rock mass extending to the surface, and the rock mass in this area is mainly vertical deformation.
-
(3)
Zone C is located between the fracture boundary of the moving basin and the boundary of the separation range inside the slope. Due to the loss of the lateral support of the rock mass in zone B, deformation occurs along the slope. Therefore, both the horizontal movement and vertical movement characteristics of the rock and soil mass are obvious. Circular arc sliding easily occurs inside loose materials or sliding along a weak structural plane, which is the key area for the deformation and instability of the mining slope.

Deformation and failure zones of overlying rock in the end slope under the coal extraction condition
5 Conclusion
-
(1)
A 2D/3D integrated simulation experiment device is developed for end-slope coal mining, and a typical engineering geological model of an end slope under near horizontal conditions is established. The whole process of “formation of mining roadway group—failure of supporting coal pillar—instability of slope rock mass” is simulated, and the yield failure characteristics of supporting coal pillars and the movements and deformation laws of slope rock masses in end-slope mining fields are verified.
-
(2)
The triggering condition of slope deformation and failure is under the combined action of dynamic and static loads. The actual stress of the supporting coal pillar in the deep part of the geometric centre along the slope of the mining roadway group is greater than the ultimate stress, and then large discontinuous deformation of multiple adjacent coal pillars around the central coal pillar is caused by compressive shear failure. The key position of yield failure of the supporting coal pillar is located in the deep part of the geometric centre along the slope of the roadway group. At the end of the roadway, the supporting coal pillar within the width of 2.5–3 times the roadway will not be destroyed. The boundary of the final collapse plane range of the roadway group is approximately a closed curve formed by two paraboloids, which are axisymmetric with the central coal pillar and open oppositely. The parabola opening in the shallow part of the slope area is small, and the parabola opening in the deep part of the slope area is large.
-
(3)
There is an obvious spatiotemporal correspondence between the failure of the supporting coal pillars and the deformation of the slope surface. According to the movement and failure characteristics of the rock mass, the slope can be divided into three sections: upper, middle and lower. The horizontal and vertical deformation of the rock mass in the upper area are obvious, the rock mass in the middle area mainly exhibits vertical deformation, while the rock mass in the lower area mainly exhibits horizontal deformation. The upper area and the lower area are the key areas of deformation and instability; the former is prone to circular sliding in loose material or bedding sliding along a soft structural plane, while the latter is prone to local collapse of a single step. Physical simulation, numerical analysis and field monitoring data are basically consistent, which provides a theoretical basis for slope stability control in an end-slope mining field.
Data availability
Enquiries about data availability should be directed to the authors.
References
Adhikary D, Shen B, Fama M (2002) A study of highwall mining panel stability. Int J Rock Mech Min Sci 39(5):643–659
Chen YL, Wu HS (2016) Catastrophe instability mechanism of rib pillar in open-pit highwall mining. J China Univ Min Technol 45(05):859–865
Chong L, Qingxiang C, Yingjue Y et al (2011) Assessment of feasibility of leftover coal mining in end-slope of surface mine. J Min Saf Eng 28(02):263-266+272
Chunjie C (2012) Discussion on mining technology of surface mine group in Erdos area. Coal Eng 12:16–18
Ding X, Li S, Wang J et al (2013) Optimization of underground mining development direction about end slope coal pillar recovery of open-pit coal mine. J China Coal Soc 38(11):1923–1928
Ding X, Wang J, Li W et al (2014) Analysis of slope sliding depth for open-underground combined mining under coupling effects about key strata. J China Coal Soc 39(S2):353–358
Ding X, Wang Z, Li W (2016) Dynamic process and typical deformation-failure mechanism of mining slope. J China Coal Soc 41(10):2606–2611
Ding X, Li F, Li H et al (2020) Study on formation mechanism and evolution model about sliding surface of the bedding rock mining slope. J Min Saf Eng 37(05):1019–1026
Ding X, Li F, Fu T et al (2021) Overburden movement and failure law of coalface in end slope and the slope stability control method. J China Coal Soc 46(9):2883–2894
Elmouttie M, Karekal S (2017) A framework for geotechnical hazard analysis in highwall mining entries. Procedia Eng 191:1203–1210
Ghabraie B, Ren G, Smith J et al (2015) Application of 3D laser scanner, optical transducers and digital image processing techniques in physical modelling of mining-related strata movement. Int J Rock Mech Min Sci 80:219–230
Jianming Z, Xianquan L, Jianping W et al (2009) Similarity simulation on slope stability under condition of combined open and underground mining. J Eng Geol 17(2):207–211
Li ZK, Liu H, Dai R et al (2005) Application of numerical analysis principles and key technology for high fidelity simulation to 3-D physical model tests for underground caverns. Tunn Undergr Space Technol 20(4):390–399
Luo X, Ross J, Hatherly P et al (2001) Microseismic monitoring of highwall mining stability at Moura mine, Australia. Null 2001(1):1–6
Mo S, Zhang C, Canbulat I et al (2016) A review of highwall mining experience and practice. Proceedings of the 16th coal operators’ conference, mining engineering. University of Wollongong, Wollongong, pp 522–530
Porathur JL, Karekal S, Palroy P (2013) Web pillar design approach for highwall mining extraction. Int J Rock Mech Min Sci 64(12):73–83
Porathur JL, Srikrishnan S, Verma CP et al (2014) Slope stability assessment approach for multiple seams highwall mining extractions. Int J Rock Mech Min Sci 70(7):444–449
Qian MG, Xu JL (2019) Behaviors of strata movement in coal mining. J China Coal Soc 44(4):973–984. https://doi.org/10.13225/j.cnki.jccs.2019.0337
Ross C, Conover D, Baine J (2019) Highwall mining of thick, steeply dipping coal—a case study in geotechnical design and recovery optimization. Int J Min Sci Technol 29(5):777–780
Runcai B, Chuang L, Yingdong X et al (2014) Coordination mining technology for coal underlying the slopes between two adjacent open pits. J China Coal Soc 39(10):2001–2006
Seib W-T (1992) Advances in highwall mining. In: 3rd Large open pit mining conference, Mackay, Queensland, pp 145–150
Shen B, Duncan-Fama ME (2001) Review of highwall mining experience in Australia and a case study. Aust Geomech 36(2):25–32
Shuai Z, Quntao Z, Ting Y et al (2016) Application analysis of highwall miner for surface mine mining in China. Coal Technol 35(06):233–235
Sun S, Wang S (2000) Study of sliding mechanism for slope due to the excavation from open pit into underground mining. Chin J Rock Mech Eng 19(1):126–129
Sun T, Yue Z, Gao B et al (2011) Model test study on the dynamic response of the portal section of two parallel tunnels in a seismically active area. Tunn Undergr SpaceTechnol. 26(2):391–397
Weishen Z, Yong L, Shucai L et al (2011) Quasi-three-dimensional physical model tests on a cavern complex under high in-situ stresses. Int J Rock Mech Min Sci 48(2):199–209
Wengang L, Leishi W, Qiang F (2012) SHM highwall mining technology and key issues of application. Coal Eng 06:1–4
Yong LIU, Zhaoxue CHE, Zhiqiang LI et al (2006) Analyses of end slope remnant coal mining and slope exposure time. J China Univ Min Technol 06:727–731
Zhang Zhi L, Liu C, Yingdong X et al (2013) Coordination mining technology of coal under side slopes in crossed limit area of two adjacent open pits. Coal Sci Technol 41(9):91–95
Acknowledgements
This study was financially supported by the National Natural Science Foundation of China (Grant No. 51774184) and the Key Projects of China Coal Technology & Engineering Group (Grant No. 2021-2-TD-ZD004).
Funding
This study was financially supported by the National Natural Science Foundation of China (Grant No. 51774184) and the Key Projects of China Coal Technology & Engineering Group (Grant No. 2021-2-TDZD004).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
We declare that we have no financial and personal relationships with other people or organizations that could inappropriately influence the submitted work.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ding, X., Li, F., Wang, Z. et al. Physical Model Experimental Study on the Coalface Overburden Movement Law on the End Slope of an Open-Pit Mine. Geotech Geol Eng 40, 4859–4877 (2022). https://doi.org/10.1007/s10706-022-02206-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10706-022-02206-6