
Abstract
In fracture mechanics, polyacrylamide hydrogel has been widely used as a model material in experiments due to its optical transparency, the brittle nature of its failure, and low Rayleigh wave velocity. Indeed, linear elastic fracture mechanics has been used successfully to model the fracture of polyacrylamide hydrogels. However, in soft materials such as hydrogels, the crack opening can be extremely large, leading to substantial geometric and material nonlinearity at the crack tip. Furthermore, poroelasticity may also modify the local mechanical state within the polymer network due to solvent migration. Direct characterization of the kinematic fields and the poroelastic response at the crack tip is lacking. Here we use a hybrid digital image correlation—particle tracking technique to retrieve high-resolution 3D particle trajectories near the tip of a slowly propagating crack, and measure the near-tip 3D kinematic fields in-situ. With this method, we charactherize the displacement fields, rotation fields, stretch fields, strain fields, and swelling fields. These measurements confirm the complex multi-axial stretching near the crack tip and the substantial geometric nonlinearity, particularly in the wake of the crack, where material rotation exceeds \(30^{\circ }\). Comparison between the measured fields and the corresponding prediction from linear elastic fracture mechanics highlights an increasing disagreement in the direct vicinity of the crack tip, particularly for displacement component \(u_x\) and the through-thickness strain component \(\varepsilon _{zz}\). Significant swelling occurs due to solvent migration, with a strong correlation to the local stretch.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Materials and structures typically fail by fracture, leading to undesired costs and consequences [1, 2]. Linear elastic fracture mechanics (LEFM) is the most well-developed theory for brittle fracture, with wide adoption in engineering science [1,2,3]; it confines the fracture process to a small-scale yielding zone near the crack tip and accurately describes the deformation fields outside this region, with the canonical ‘\(1/\sqrt{r}\)’ diverging stress field [1,2,3,4]. Within this small region, however, the deformation can be extremely large under the diverging stresses; this large deformation can lead to nonlinear material responses [5,6,7], and further induce cohesive loss or poroelastic solvent flux [8,9,10,11,12,13,14,15]. Furthermore, LEFM is developed for predominantly planar cracks that are translationally invariant along z, but a real crack can be complex, with 3D features [16,17,18,19,20,21,22,23,24,25,26,27,28,29].
For soft materials such as hydrogels, the large deformation results in an exaggerated crack opening [30,31,32] before fracture, introducing large geometric nonlinearity by local material rotation; nevertheless, hydrogels serve as a good proxy brittle material for fundamental fracture studies [25,26,27, 33,34,35,36,37], and relevant for bio medical material applications [38, 39]. While the incompressible neo-Hookean constitutive law is frequently used as the constitutive model for polyacrylamide (PAAm) hydrogels in many fracture experiments [8, 16,17,18, 21, 25,26,27], the stress-induced swelling in polymeric hydrogels is well-known [11, 40,41,42,43,44,45,46,47,48] and confirmed for PAAm hydrogels in uniaxial, biaxial, and indentation experiments [49,50,51]. Indeed, most of these studies use similar poroelastic models to those used broadly in the earth sciences [52,53,54,55,56]. Nevertheless, experiments that probe solvent transport at the tip of a crack, particularly at low-speeds, are lacking; thus, 3D characterization of the kinematic fields at small-scales with high resolution near the crack tip is essential to advance our understanding of poroelastic fracture in hydrogels and the broader class of poroelastic solids.
In this work, we use PAAm hydrogel with an oft-used composition as a model material for poroelastic solids, and embed passive micro particles into the hydrogel as material tracers [57]. 3D image stacks of a slowly propagating mode I crack are obtained using an optical microscope, and the particle trajectories are derived near the crack tip with subpixel accuracy [58,59,60], using a hybrid 3D particle tracking algorithm developed based on open-source software TrackPy [61] and Ncorr [62]. Based on the particle trajectories, 3D kinematic fields, including the displacement fields, deformation gradient tensor fields, rotation fields, stretch fields, strain fields, and swelling fields, are characterized near the crack tip [58]. The in-plane displacement components and strain components are compared with LEFM predictions. Using these kinematic measurements, we analyze the near-crack-tip geometric nonlinearity, triaxial stretch state, and poroelastic solvent migration. Furthermore, the dependency of the solvent flux on crack velocity and the steadiness of the crack speed are discussed. Our experimental methods can be readily extended to 3D complex crack investigations [16,17,18,19,20,21,22,23,24,25,26,27,28,29, 63,64,65,66,67,68,69,70,71], even in other material systems [72,73,74,75,76].
2 Method
Experiments are performed on \({450}\,\upmu \textrm{m}\)-thick polyacrylamide hydrogel samples. The hydrogels are prepared with a precursor stock solution of 13.8 wt% acrylamide monomer and 2.7 wt% bis-acrylamide cross-linker. The stock solution is first degassed in a vacuum chamber for 10 min and mixed with polystyrene particles (\({1.1}\,\upmu \textrm{m}\) in diameter) at a concentration of 0.005 wt%. The mixed solution is sonicated for 5 min to disperse the aggregated particles and ensure their uniform distribution. To initiate and accelerate the free-radical polymerization, 0.2% ammonium persulfate (APS) and 0.02% tetramethylethylenediamine (TEMED) are added to the hydrogel solution. After mixing for 30 s, the solution is poured onto a glass plate and covered with a second glass plate separated by \({380}\,\upmu \textrm{m}\)-thick spacers, and polymerization reaction proceeds for at least 4 h. The resulting polymerized hydrogel is cut into samples of uniform size (3 cm by 1 cm) and soaked in water for 24 h to reach an equilibrium state. Note that this preparation process, apart from the embedding of the particles, follows a standard protocol used in dynamic fracture experiments [25,26,27].
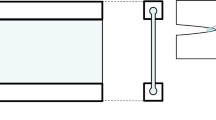
Experiments are carried out using the experimental setup shown in Fig. 1a. The hydrogel sample is mounted on the grips of a custom-built testing apparatus, and an edge crack (c.a. \({2}\,\textrm{mm}\)) is inserted on one side of the sample. The hydrogel sample is submerged in water throughout the experiment, and illuminated from a large angle using a light source to obtain a dark-field image. The light scattered from the particles is collected by a water-immersion objective (\(10\times \), mounted on a Nikon TI eclipse microscope, not depicted) and imaged onto the sensor of a high-resolution camera (Hamamatsu C13440, resolution: \(2048\times 2048\) pixels, bit depth: 16 bit). By synchronizing the z-positioning of the objective and the image acquisition, 3-dimensional image stacks are obtained. An example of the image stacks containing the polystyrene micro particles is shown in Fig. 1b, and the appearance of a single particle in the image stack is extracted and visualized in 3D in Fig. 1c. Because the lighting configuration collects only scattered light, the particles appear larger than their actual size, with the apparent extent elongated along the z-axis.
In each experiment, a reference image stack capturing the center of the sample is recorded before any loading is applied. Then, by actuating a servo motor (not depicted), the grips move outwards symmetrically, and therefore, exert displacement-controlled remote tensile loading to sample. After each loading step, an image stack is recorded. As loading progresses, the pre-cut crack gradually opens and eventually starts to propagate slowly. During crack propagation, the displacement of the grips is held constant, and the initial crack grows steadily. Image stacks are recorded for further analysis as the crack propagates across the field-of-view.

a Experimental setup. A hydrogel sample is stretched by two symmetrically actuated grips. The hydrogel sample is \({3}\,\textrm{cm}\) long, \({1}\,\textrm{cm}\) wide, and \({450}\,\upmu \textrm{m}\) thick. The hydrogel was embedded with with passive particles, and a pre-cut was made before the uniaxial loading. During the experiment, light scattered from the particles is collected by a water-immersion objective (mounted on a microscope, not depicted) and transmitted to a high-resolution camera. By synchronizing the z-positioning of the objective and the camera image acquisition, volumetric image stacks are obtained. Inset: a magnified view of the hydrogel sample under stretch. b An example of an recorded image stack. The sample was stretched along y-axis, and the crack propagates along x-axis. The crack surface is annotated by red dashed curve. The scale bar is \({200}\,\upmu \textrm{m}\) in xy-plane, and the z-spacing between slices is \({5}\,\upmu \textrm{m}\). c 3D view of the light scattered by a single particle, as a representation of the point spread function of the imaging system. The light intensity is encoded by the color
The recorded image stacks are processed according to the workflow shown in Fig. 2a to obtain the 3D kinematic fields near the tip of the propagating crack. The raw image stacks are first pre-processed by a bandpass filter to suppress the image noise, and then analyzed with the open-source particle tracking algorithm, TrackPy [61]. In particle tracking, two essential steps are performed. First, particles are located in each individual stack, and second, particles are linked between consecutive stacks to identify their trajectories. During the locating phase, particles are identified in 3D in the image stacks, and their coordinates are extracted with subpixel resolution. Given the random distribution of particles in the sample, the subpixel accuracy is confirmed for all axes by the uniform distribution of the fractional part of particles’ coordinates, as shown in Fig. 2b. The distribution of the particles in the sample is statistically analyzed by the radial distribution function shown in Fig. 2c, which implies that the average inter-particle distance is approximately \({5}\,\upmu \textrm{m}\) and the particles are uniformly distributed over a domain larger than \({10}\,\upmu \textrm{m}\). During the linking phase, an intermediate digital image correlation (DIC) step, using the open-source DIC software Ncorr [62], is incorporated to enhance the linking reliability and accuracy. DIC calculation is sparsely carried out on selected slices in consecutive image stacks. Despite its limitations in handling large deformation and large rotation near the crack tip, DIC provides reliable predictions for particle linking in consecutive stacks, where the deformation and rotation is significantly smaller. DIC ensures robust tracking even for particles that displace by a distance larger than the average inter-particle spacing between consecutive stacks.
After successfully tracking the particles to form trajectories that can be traced back to the reference state, full-field 3D displacements from the reference state are directly calculated. The crack tip position is visually identified in the deformed state, and mapped back to the reference state by linear interpolation of the location of the adjacent particles. The deformation gradient tensor \(\textbf{F}\) at each particle position is then estimated by a local least squares routine [58], using the displacement vectors of nearest-neighbor particles. By performing the polar decomposition of \(\textbf{F}\), the near-crack-tip rotation tensor \(\textbf{R}\) and stretch tensor \(\textbf{U}\) are determined. Additionally, the local volumetric change of the hydrogel, i.e., the swelling ratio, is readily quantified by measuring the determinant of \(\textbf{F}\).

a Image processing procedure. The raw image stacks are first pre-processed with a bandpass filter to eliminate most image noise, and then treated with 3D particle tracking algorithm to obtain the 3D displacement fields, which essentially consists of two steps—particle locating and particle linking. To elevate the reliability in linking particles, an intermediate DIC step is incorporated. Once the 3D displacement data is obtained, deformation gradient tensor is estimated at each particle location by a least-squares approach [58], and further the kinematic data, such as stretch, rotation, and volumetric change. b The histogram of the fractional part of particle coordinates in the reference stack, determined in the particle locating process. c The radial distribution function g(r) of particles located in the reference stack. g(r) peaks at approximately \({8}\,\upmu \textrm{m}\), and asymptotes to 1 after \({15}\,\upmu \textrm{m}\)
3 Results
Using the experimental method described in Sect. 2, we acquired image stacks of a propagating planar crack, nearly translationally invariant along z, and derived the particle trajectories near the crack tip. The image stacks have the size of \(2048 \times 2048 \times 106\), with the resolution of \({0.43}\,\upmu \mathrm{m/px}\) in x/y and \({5}\,\upmu \mathrm{m/px}\) in z. The acquisition of an image stack takes c.a. 60 s. The crack was critically loaded and steadily propagated at a very slow speed of \({0.02}\,\upmu \mathrm{m/s}\), as measured by the linear fit of the crack tip position as a function of time as plotted in Fig. S1(a).
3.1 Kinematic fields
Displacement fields at each stack are readily calculated from particle trajectories for all three axes. A typical displacement field in our fracture experiment is visualized in 3D in Fig. 3a. Representative particles are selected in the middle plane of the sample, and the displacement fields \(u_x\) and \(u_y\) for these particles are plotted in the reference state in Fig. 3b, c, respectively. As can be seen from the plots, particles are tracked very close to the crack tip. Both the direction and the magnitude of particle displacements are symmetric about the crack path, as consistent with the displacement predicted by LEFM for mode I fracture. To investigate the thickness dependence of the displacement fields, we interrogate the particles in the xz-plane across the crack front; their displacement field is plotted in Fig. 3d. According to the direction of the displacement vectors, the in-plane displacement \(u_x\) is larger than the out-of-plane displacement \(u_z\) for most of the particles. Nevertheless, a substantial \(u_z\) due to material contraction along the z-axis is evident, especially near the top and bottom free surfaces at the crack tip.

a 3D displacement quiver plot for the particles tracked in the entire image stack (downsampled by a factor of 6 for better visualization). The arrows point from the particle locations in reference state to their location in the current state, and their length is scaled by 0.5. The arrows’ color corresponds to the magnitude of displacement. b, c 2D displacement quiver plots for the particles in the middle xy-plane (within \(\pm {10}\,\upmu \textrm{m}\)). The arrows are real scaled and color-coded by the magnitude of \(u_x\) in (b) and \(u_y\) in (c). The red solid line indicates the crack, and the green dashed line indicates the xz-plane that is shown in (d). d 2D displacement quiver plot for the particles on the crack front xz-plane (within \(\pm {10}\,\upmu \textrm{m}\)). The arrows are real scaled and color-coded by the magnitude of \(u_z\). The crack front is represented by the red solid line, and its faded left side represents where the crack opens after loading. The background image is resliced from the image stack and equally scaled in both axes. The scale bar in (b)–(d) is \({100}\,\upmu \textrm{m}\)
To analyze the displacement fields quantitatively, we evaluated the displacement components for material points along radial traces emanating from the crack tip in the material frame of reference for 5 different angles, as shown schematically in Fig. 4a. \(u_x\) and \(u_y\) are interpolated at these points for a total of 53 stacks, and the averaged values are represented in Fig. 4b, c, respectively. The standard deviations are given in Fig. S2. From the log–log plots, it is seen that for all evaluated angles, both \(u_x\) and \(u_y\) have the same trend with respect to R. Specifically, \(u_x\) increases linearly with R in the immediate vicinity of the crack tip (\(R<{50}\,\upmu \textrm{m}\)) but follows the \(\sqrt{R}\) rate beyond \(R \approx {50}\,\upmu \textrm{m}\); in contrast, \(u_y\) follows the \(\sqrt{R}\) trend across the entire investigated region.
The measured in-plane displacement components, \(u_x\) and \(u_y\), are compared with the LEFM prediction for Mode I crack [1], as shown in Fig. 5. The LEFM displacements are calculated with plane stress condition, a shear modulus of 35 kPa [25, 26], and a Poisson’s ratio of 0.48 (representing the incompressibility of the hydrogel). The stress intensity factor is derived from the critical energy release rate \({5}\,\mathrm{J/m}^2\) [25, 26]. Note that these values used for LEFM prediction are not guaranteed to precisely represent the hydrogel’s mechanical properties, particularly when the swelling becomes significant near the crack tip, as will be discussed in Sect. 3.2.
Generally from the comparison, it is seen that LEFM over-predicts the \(u_x\) displacements across the entire measured field-of-view, but provides a relatively more accurate prediction for \(u_y\), despite the magnitude of \(u_y\) is larger than \(u_x\) in the majority of the region. In the \(u_x\) field, a constant offset approximately \({25}\,\upmu \textrm{m}\) is observed. Note that this offset is not due to the ‘T-stress’ during the experiment [5, 6], as T-stress is a constant tensile stress which should introduce extra positive displacement in \(u_x\) with a gradient. In the \(u_y\) field, LEFM slightly under-predicts in the region ahead of the crack tip and slightly over-predicts in the wakes of the crack.

a Data are interpolated at the points \((R, \Theta )\) in the middle xy-plane in reference state (blue dots), where R is the distance from the crack tip to the interpolation point and \(\Theta \) is the angle of this line (represented in green) to the x-axis. Upon loading, the crack opens (red solid line to red dashed line), and the particles displace from their reference position (laid on green solid line) to their current position (laid on green dashed line). b \(u_x\) is interpolated in the reference state at points on the lines with constant angles. The interpolation is done for total 53 stacks and \(u_x\) is averaged in time and shown. c \(u_y\) is interpolated and shown in the same way. Note that at \(\Theta =0\), \(u_y\) approaches zero, and therefore, is not visible in the log–log plot

Comparison of the measured in-plane displacement fields and the LEFM prediction [1] at particles in the middle xy-planes (within \(\pm {100}\,\upmu \textrm{m}\)), a–c \(u_x\) and d–f \(u_y\). The difference shown in (c) and (f) is defined as the deviation of the LEFM prediction from the experimental measurement. The red solid line indicates the crack in the reference state, and the white scale bar is \({100}\,\upmu \textrm{m}\)

a Rotation about z-axis, \(R_z\), at particles in the middle xy-planes (within \(\pm {100}\,\upmu \textrm{m}\)). b \(R_z\) calculated at same material points based on LEFM displacement fields. c The difference of \(R_z\) between the LEFM prediction and the experimental measurement. The red solid line indicates the crack in the reference state. The scale bar is \({100}\,\upmu \textrm{m}\)
With the measured 3D particle displacement fields, the deformation gradient tensor \(\textbf{F}\) for each particle is calculated using a least squares approach [58]. Using the polar decomposition \(\textbf{F}=\textbf{RU}\), the rotation tensor \(\textbf{R}\) and stretch tensor \(\textbf{U}\) are calculated.
Rotation about the x, y, and z axes is determined from the rotation tensor \(\textbf{R}\) [77]. The rotation about z-axis is found to be the dominant component, and is plotted in Fig. 6a. This rotation is anti-symmetric about the crack path, and remains minimal in the cone-shaped region ahead of the crack tip. It becomes prominent on both sides of the crack, especially after the crack just breaks the material, where the maximum rotation exceeds \(30^{\circ }\). We estimated \(R_z\) from LEFM displacement fields by calculating the displacement gradients and performing the polar decomposition, as shown in Fig. 6b. The structure and the magnitude of the LEFM \(R_z\) field is similar to the experimental measurement. From the differential plot shown in Fig. 6c, LEFM provides accurate prediction about \(R_z\) in the majority of the near-crack-tip region, and the deviation only becomes noticeable near the free surfaces of the crack wake. Unlike the rotation about the z-axis, the rotation about the x- and y-axes is small, as shown in the Supplementary Fig. S3.

The components of the right stretch tensor a \(U_{xx}\), b \(U_{yy}\), c \(U_{zz}\), and d \(U_{xy}\), are plotted in the reference state. The white solid line indicates the crack in the reference state. The scale bar is \({100}\,\upmu \textrm{m}\)

Interpolated stretch values a \(U_{xx}\), b \(U_{yy}\), c \(U_{zz}\), and d \(U_{xy}\) in the reference state, with the interpolation points and averaging stacks consistent with those in Fig. 4. \(U_{zz}\) exhibits more fluctuation than the other stretch components, which is due to the lower image resolution in z (\({5}\,\upmu \mathrm{m/px}\)) than that in x and y (\({0.43}\,\upmu \mathrm{m/px}\))

Comparison of the measured strain fields and the LEFM prediction [1] at particles in the middle xy-planes (within \(\pm {100}\,\upmu \textrm{m}\)), a–c \(\varepsilon _{xx}\), d–f \(\varepsilon _{yy}\), g–i \(\varepsilon _{zz}\), and j–l \(\varepsilon _{xy}\). The difference shown in the last column plots is defined as the deviation of the LEFM prediction from the experimental measurement. The red solid line indicates the crack in the reference state, and the white scale bar is \({100}\,\upmu \textrm{m}\). The black arrows in (b) and (k) indicate the structures that are predicted by LEFM but do not show in the experiment
The stretch tensor \(\textbf{U}\) is also obtained from the polar decomposition, and the spatial distribution of the components \(U_{xx}\), \(U_{yy}\), \(U_{zz}\), and \(U_{xy}\) is illustrated in Fig. 7. Despite the mode I loading symmetry applied along the Y-axis, a substantial tensile stretch \(U_{xx}\) is observed, particularly near the crack surfaces and in a cone-shaped region ahead of the crack tip. \(U_{yy}\) exhibits stretch values higher than other components in the uncracked material, with maximum stretch exceeding 1.6, and it intensifies when approaching the crack tip from any directions. \(U_{zz}\) shows a more uniform distribution compared to the other components, with values typically less than one; these values suggest that the material near the crack tip generally experiences a compression across the thickness due to conservation of volume. The shear component is found to be minimal in the uncracked material, but becomes significant in the wake of the crack, particularly near the crack surfaces.

a 3D visualization of the volumetric change near the tip of a fully-equilibrium propagating crack, depicted by the \(\textrm{det}(\textbf{F})\). b Distribution of \(\textrm{det}(\textbf{F})\) in the middle xy-plane (within \(\pm {100}\,\upmu \textrm{m}\)). c Interpolation of \(\textrm{det}(\textbf{F})\) (same procedure in Fig. 4). d \(\textrm{det}(\textbf{F})\) with respect to stretch \(U_{yy}\) at the interpolation points, revealing a positive correlation between them
The stretch fields are quantitatively analyzed similar to the displacement fields along radial traces in the material frame of reference. The resulting average stretch values are plotted in Fig. 8, with the standard deviations given in Fig. S4. For the in-plane stretch components, \(U_{xx}\) and \(U_{yy}\), the tensile stretch increases close to the crack tip, and the increasing slope becomes steeper and steeper, as expected due to the stress concentration near the crack tip. \(U_{xx}\) shows very similar curves for the evaluation at \(\Theta =60^{\circ }\) and \(\Theta =90^{\circ }\), and the stretch values at the same radial distance R are smaller than that at other angles, which is consistent with the structure of the \(U_{xx}\) field shown in Fig. 7. \(U_{yy}\) has weak dependence on the angular position, and all curves converge on a finite far-field stretch value. The amplitude of the through-thickness compressive stretch, \(U_{zz}\), consistently intensifies approaching the crack tip, seemingly in a linear relation with R for all \(\Theta \). The value of the shear component \(U_{xy}\) is around zero for \(\Theta \le 60^{\circ }\); for a larger \(\Theta \), \(U_{xy}\) first steeply increases with R and maximize around \(R={70}\,\upmu \textrm{m}\), and then gradually decreases to a finite value. This is consistent with the large displacements along the crack tip opening.
Note that unlike the displacement fields, no angle-independent functional form is found to be potentially informative for the stretches; instead, the spatial structure in the stretch reflects the complication of the near-crack-tip deformation fields, as evidenced by the local multi-axial loading condition with finite values of \(U_{xx}\), \(U_{yy}\) and \(U_{zz}\).
We calculate the Green-Lagrange stain tensor from the stretch tensor by \(\textbf{E}=\frac{1}{2}\left[ \textbf{U}^2 - \textbf{I} \right] \), and compare the strain components (\(\varepsilon _{xx}\), \(\varepsilon _{yy}\), \(\varepsilon _{zz}\), and \(\varepsilon _{xy}\)) to the LEFM predictions, as shown in Fig. 9. The LEFM strain fields are calculated with plane stress condition and the same material properties used in the Fig. 5.
From the comparison, LEFM predicts the \(\varepsilon _{xx}\) fields in good agreement with the experimental measurement, except the two cone-shaped structures indicated by the black arrows in the LEFM \(\varepsilon _{xx}\) field shown in Fig. 9b. \(\varepsilon _{yy}\) concentrates at the crack tip in both experiment and LEFM with similar values, but the shape is slightly different; this strain concentration appears to be more isotropic in the experiment than in the LEFM. In LEFM, the value of \(\varepsilon _{yy}\) ahead of the crack tip is apparently smaller than at approximately \(\pm 60^{\circ }\) to the crack path, leading to a substantial deviation in the region ahead of the crack tip. Approaching to the crack tip, this deviation becomes large. The through-thickness strain \(\varepsilon _{zz}\) is predicted by LEFM significantly higher than the measurement across the entire field-of-view, especially at the crack tip, This is because LEFM calculates \(\varepsilon _{zz}\) only as the contraction induced by the in-plane stress components, but in fact the relaxation due to solvent migration is not negligible as will be discussed in Sect. 3.2, particularly under the substantial \(\varepsilon _{xx}\) and \(\varepsilon _{yy}\) strains. The in-plane shear strain \(\varepsilon _{xy}\) is overall well predicted by LEFM, except in the structures that are indicated by the black arrows in Fig. 9k.
3.2 Near-crack-tip solvent transport
We evaluate the near-crack-tip solvent transport by analyzing the local volume change within the material, which is readily obtained by computing the determinant of \(\textbf{F}\). This is a direct measurement of the swelling at the crack tip, straightforward but only feasible with fully resolved 3D kinematic fields; planar analyses yield valuable insights [7, 8], but do not resolve the out-of-plane deformation.

a Distribution of \(\textrm{det}(\textbf{F})\) on the crack front xz-plane (within \(\pm {10}\,\upmu \textrm{m}\)). The red solid line represents the crack front and the faded region represents to the crack opening region upon loading. The scale bar is \({100}\,\upmu \textrm{m}\). b Interpolation of \(\textrm{det}(\textbf{F})\) is conducted on the crack front XZ-plane in the reference state and over a total of 53 stacks. The color-coded values of \(\textrm{det}(\textbf{F})\) are displayed using the same color scale as shown in panel (a). Blue circles donate the locations of the maximum of \(\textrm{det}(\textbf{F})\) at the same X position
We calculate \(\textrm{det}(\textbf{F})\) for all particles, and the distribution of the resulting values is visualized in 3D in Fig. 10a. \(\textrm{det}(\textbf{F})\) is observed to be generally greater than one over the entire volume, and a pronounced non-uniformity can be seen near the crack tip, which can be seen with greater clarity in the 2D projection shown in Fig. 10b. In the immediate vicinity of the crack tip, \(\textrm{det}(\textbf{F})\) is large, and can exceed 1.5, corresponding to a volume increase greater than 50%. Considering the incompressibility of the solvent (water) and polymer chains, this volumetric change arises solely due to solvent migration.
We analyze \(\textrm{det}(\textbf{F})\) at groups of points along radial traces emanating from the crack tip, similar to the analysis for the kinematic fields as can be seen in Fig. 10c the average values and in Fig. S5 the standard deviations. Along all the \(\Theta \) evaluated, \(\textrm{det}(\textbf{F})\) sharply increases close to the crack tip, and the increasing rate reduces when R increases. This changing rate also depends on the angular position of the evaluation point; for a given R, \(\textrm{det}(\textbf{F})\) changes more drastically for a larger \(\Theta \) than for a small \(\Theta \), particularly when \(R<{100}\,\upmu \textrm{m}\); this indicates a concentration of solvent migration in the region ahead of the propagating crack that is not uniformly distributed, but localized on the crack axis. These curves are very similar to the stretch curves \(U_{yy}\) shown in Fig. 8b in terms of shape. In fact, a strong correlation is evidenced between \(\textrm{det}(\textbf{F})\) and the dominant stretch \(U_{yy}\), as illustrated in Fig. 10d. This observation suggests that the swelling at the crack tip may be induced by stretch.
The distribution of \(\textrm{det}(\textbf{F})\) is also studied in the crack plane ahead of the crack tip, as shown in Fig. 11a. The evolution of \(\textrm{det}(\textbf{F})\) along X-axis remains consistent across all Z-position, where \(\textrm{det}(\textbf{F})\) becomes larger as \(R\rightarrow 0\). The distribution of \(\textrm{det}(\textbf{F})\) at a given X does not vary significantly along the Z-axis; however, after interpolating and averaging \(\textrm{det}(\textbf{F})\) on a grid shown in Fig. 11b, a slight but evident \(\textrm{det}(\textbf{F})\) difference in Z is observed, particularly near the crack front. At each X-position, \(\textrm{det}(\textbf{F})\) is found to maximize near the middle of the sample, as indicated by blue circles, and decreases to the free surfaces. This difference is presumably due to the Z variation of the stress tri-axiality, which varies from nearly plane stress near the free surfaces to nearly plane strain in the middle region. Beyond \({100}\,\upmu \textrm{m}\) from the crack front, \(\textrm{det}(\textbf{F})\) becomes uniform in z (with a standard deviation \(\approx 0.006\)).
4 Discussion
In this work, we measure the kinematic fields near the tip of a slowly propagating planar crack and highlight the substantial swelling at the crack tip. These characterizations are carried out based on 3D particle trajectories measured from volumetric image stacks and the resulting particle tracking. The particle trajectories and derivative kinematic quantities are computed purely geometrically, without making any assumptions about the material. Therefore, this experimental method can be readily adopted for similar characterization in other soft materials [72,73,74,75,76]. This analysis may be applied to questions in fundamental fracture mechanics, including fully 3D crack perturbations [78,79,80,81], 3D crack path selection criteria [82,83,84,85,86], the kinematics of crack surface patterns [16,17,18,19,20,21,22,23,24,25,26,27], and crack stability under mixed-mode loading conditions [29, 63,64,65,66,67,68].

The comparison of \(\textrm{det}(\textbf{F})\) for both an equilibrated (low-v) and a non-equilibrated (higher-v) crack
The crack generating the fields analyzed in this manuscript is propagating extremely slowly—though the entire field of view is of the order of a mm or so, this experiment took\(\approx \) 3 h (see Fig. S1(a)); this timescale is comparable to the poroelastic timescale, \(B^2/D \approx {1600}\,\textrm{s}\), where \(B = {450}\,\upmu \textrm{m}\) is the sample thickness and \(D \approx 10^{-10}\,\textrm{m}^2/\textrm{s}\) is the effective diffusivity of water molecule in a polyacrylamide hydrogel [87]. This slow crack propagation results in significant and diverging swelling at the crack tip, where the swelling is highly correlated with the stretch along the loading direction. Indeed, the multi-component stretch state at the crack tip can lead to solvent migration, as evidenced in that uniaxial and biaxial tensile tests of hydrogels [49, 50, 88, 89]; on the other hand, the swelling, as a time-dependent process, can modify the local kinematic fields, with consequences for the local material properties and the stress fields [51, 89]. While the incompressible neo-Hookean material model has been extensively used in dynamic fracture experiments of hydrogels, where it is highly accurate due to the short time duration of the sample loading during crack propagation [25,26,27, 37, 86], care should be taken in selecting material models for slow cracks.
In order to determine whether the observations here are time-dependent, we carried out a second experiment for a faster, albeit still very slow, crack (\(v\approx {0.63}\,\upmu \mathrm{m/s}\)), using an experimental setup with a higher-speed piezo stage which takes only 3 s to acquire an image stack. The duration of this experiment is shorter than the poroelastic timescale, and therefore, the solvent does not have sufficient time to equilibrate. As shown in Fig. 12, the volumetric change for the slow, equilibrated crack is generally slightly larger than that for the non-equilibrated crack, as indicated by the larger value of \(\textrm{det}(\textbf{F})\). Far from the crack tip (\(R\approx {300}\,\upmu \textrm{m}\)), \(\textrm{det}(\textbf{F})\) maintains a finite value for both cracks due to stretch. In the immediate vicinity of the crack tip, a continuous increase of \(\textrm{det}(\textbf{F})\) is observed for both cracks, while the slope (magnitude) decreases for the non-equilibrated crack. This discrepancy can be attributed to the difference in crack velocity. For the equilibrated crack, the crack is slow enough to facilitate the solvent transport and continuous increase of volume. Conversely, for the non-equilibrated crack, the crack velocity is relatively high (yet still quasi-static), and the solvent does not have sufficient time to migrate from the environment to the internal material, leading to a slower increase in volume, compared to that of the equilibrated crack.
Direct comparison of the displacements and stretches between the two cracks is provided in supplementary Figs. S6 and S7. The in-plane displacement components, \(u_{x}\) and \(u_{y}\), and stretch components, \(U_{xx}\) and \(U_{yy}\), are similar for both cracks, but a disparity in \(U_{zz}\) is observed. Near the crack tip, \(U_{zz}\) for the equilibrated crack is larger than that for the non-equilabrated crack, indicating that the material at the crack tip relaxes through the thickness direction during the transition from the non-equilabrated state to the equilabrated state. Nevertheless, observations and findings regarding the kinematic fields for the slow crack are also true for the slightly faster crack.
The swelling near the crack tip is shown to be induced by the stretch, but it still remains uncertain through which component. As depicted in Fig. 10d, \(U_{yy}\) seems highly linearly correlated with \(\textrm{det}(\textbf{F})\). But comparing the equilibrated and nonequilibrated cracks, the values of \(U_{yy}\) are almost identical in the entire evaluated region, whereas a substantial difference is evident in \(\textrm{det}(\textbf{F})\). Microscopically, the osmotic stress competes with the stress on the polymer chains; on the macroscopic scale, the poroelastic swelling may mutually affect the material’s mechanical properties and stretch, making the coupled problem challenging.
Another interesting observation of the experiments is the extremely slow crack velocity that is nevertheless stable, despite the uniformity of the applied strain in the far-field. Highly cross-linked polyacrylamide hydrogels are canonically modelled as brittle material, analogy to the traditional brittle materials such as glass and ceramics; however, in these brittle materials, to the best of our knowledge, mode I fracture has never been reported at this extremely slow speed. We suspect that in our experiments, the slow cracks may be stabilized by the poroelasticity [11], possibly by means of viscous dissipation in the flow through the gel’s polymer network. Indeed, we have never achieved this slow crack speed in air. Certainly, we can verify this hypothesis by changing the solvent surrounding the crack. But more in-depth measurement is required to identify the mechanism that stabilizes this slow crack growth.
While the 3D measurements provide rich kinematic information near the crack tip, the analysis of the stress is now limited by the constitutive model. As shown in the results, at the crack tip, not only is the deformation substantial at the crack tip, but the local loading condition is also multi-axial. On top of that, solvent migration adds poroelasticity to the material response. Additionally, distributed damages around the crack tip may also locally alter the material properties [8, 9]. Despite these challenges, an accurate and physically-meaningful material model is indispensable to facilitate further stress analysis near the crack tip and to evaluate the local J-integral analysis [3].
5 Conclusion
In this manuscript, we measured the fully-3D displacement fields near the tip of a slowly propagating crack in a hydrogel sample, using a microscopic 3D imaging technique and a DIC-assisted particle tracking algorithm. Using the high-resolution displacement fields, we estimated the deformation gradient tensor fields, and further obtained the near-crack-tip rotation fields, stretch fields, strain fields, and swelling fields. Our results uncover substantial material rotation, which can exceed \(30^{\circ }\) in the wake of the crack. The local loading condition at the crack tip is complicated; the multiaxiality shown by the finite values of \(U_{xx}\), \(U_{yy}\), and \(U_{zz}\); and the large stretch exceeding 1.6 in the loading direction. The displacement fields and strain fields are compared with the LEFM predictions for Mode I crack; displacement component \(u_x\) is found to be over-predicted by LEFM across the field-of-view; strain field are estimated over-structured in LEFM \(\varepsilon _{xx}\) and \(\varepsilon _{xy}\) fields, leading to inaccurate strain values in these regions; \(\varepsilon _{zz}\) contraction is apparently over-estimated across the field-of-view, particularly at the crack tip. The fully resolved 3D displacement field enabled a quantitative measurement of the significant solvent migration at the crack tip. The solvent migration led to hydrogel swelling, which is highly correlated with the local stretch along the loading axis, and is dependent on the crack velocity. The extremely slow crack speed observed may result from poroelastic flow and viscous losses, but further study is required to test this conjecture. The experimental method we used can open a door for 3D characterization of near-crack-tip kinematic fields, particularly for complex cracks and for soft materials, where essential material structure approaches the micron-scale. Our experimental results are expected to provide insights for constitutive model development/selection for soft materials undergoing multi-axial loading and poroelastic swelling, and might prove useful for the validation of numerical calculations of hydrogel systems.
Data Availability
Data is provided within the manuscript or supplementary information files.
References
Anderson TL, Anderson TL (2005) Fracture mechanics: fundamentals and applications. CRC Press, Boca Raton
Freund LB, Freud L (1998) Dynamic fracture mechanics. Cambridge University Press, Cambridge
Rice JR (1968) A path independent integral and the approximate analysis of strain concentration by notches and cracks. J Appl Mech 35(2):379. https://doi.org/10.1115/1.3601206
Williams M (1952) Stress singularities resulting from various boundary conditions in angular corners of plates in extension. J Appl Mech
Livne A, Bouchbinder E, Fineberg J (2008) Breakdown of linear elastic fracture mechanics near the tip of a rapid crack. Phys Rev Lett 101(26):264301
Bouchbinder E, Livne A, Fineberg J (2008) Weakly nonlinear theory of dynamic fracture. Phys Rev Lett 101(26):264302
Qi Y, Zou Z, Xiao J, Long R (2019) Mapping the nonlinear crack tip deformation field in soft elastomer with a particle tracking method. J Mech Phys Solids 125:326
Li C, Wei X, Wang M, Adda-Bedia M, Kolinski JM (2023) Crack tip kinematics reveal the process zone structure in brittle hydrogel fracture. J Mech Phys Solids 178:105330
Deng B, Wang S, Hartquist C, Zhao X (2023) Nonlocal intrinsic fracture energy of polymerlike networks. Phys Rev Lett 131(22):228102
Talamini B, Mao Y, Anand L (2018) Progressive damage and rupture in polymers. J Mech Phys Solids 111:434
Baumberger T, Ronsin O (2020) Environmental control of crack propagation in polymer hydrogels. Mech Soft Mater 2(1):14
Yu Y, Landis CM, Huang R (2018) Steady-state crack growth in polymer gels: a linear poroelastic analysis. J Mech Phys Solids 118:15
Hui CY, Long R, Ning J (2013) Stress relaxation near the tip of a stationary mode I crack in a poroelastic solid. J Appl Mech 80(2):021014
Bouklas N, Landis CM, Huang R (2015) Effect of solvent diffusion on crack-tip fields and driving force for fracture of hydrogels. J Appl Mech 82(8):081007
Wang X, Hong W (2012) Delayed fracture in gels. Soft Matter 8(31):8171
Wei X, Li C, McCarthy C, Kolinski JM (2024) Complexity of crack front geometry enhances toughness of brittle solids. Nat Phys 1–6
Wang M, Bouchbinder E, Fineberg J (2024) Size selection of crack front defects: multiple fracture-plane interactions and intrinsic lengthscales. arXiv preprint arXiv:2404.06289
Wang M, Adda-Bedia M, Kolinski JM, Fineberg J (2022) How hidden 3D structure within crack fronts reveals energy balance. J Mech Phys Solids 161:104795
Tanaka Y, Fukao K, Miyamoto Y, Sekimoto K (1998) Discontinuous crack fronts of three-dimensional fractures. Europhys Lett 43(6):664
Baumberger T, Caroli C, Martina D, Ronsin O (2008) Magic angles and cross-hatching instability in hydrogel fracture. Phys Rev Lett 100(17):178303
Kolvin I, Cohen G, Fineberg J (2018) Topological defects govern crack front motion and facet formation on broken surfaces. Nat Mater 17(2):140
Ravi-Chandar K, Knauss W (1984) An experimental investigation into dynamic fracture: II. Microstructural aspects. Int J Fract 26:65
Fineberg J, Gross SP, Marder M, Swinney HL (1991) Instability in dynamic fracture. Phys Rev Lett 67(4):457
Sharon E, Fineberg J (1996) Microbranching instability and the dynamic fracture of brittle materials. Phys Rev B 54(10):7128
Livne A, Cohen G, Fineberg J (2005) Universality and hysteretic dynamics in rapid fracture. Phys Rev Lett 94(22):224301
Goldman T, Livne A, Fineberg J (2010) Acquisition of inertia by a moving crack. Phys Rev Lett 104(11):114301
Livne A, Bouchbinder E, Svetlizky I, Fineberg J (2010) The near-tip fields of fast cracks. Science 327(5971):1359
Sommer E (1969) Formation of fracture ‘lances’ in glass. Eng Fract Mech 1(3):539
Pons AJ, Karma A (2010) Helical crack-front instability in mixed-mode fracture. Nature 464(7285):85
Sun JY, Zhao X, Illeperuma WR, Chaudhuri O, Oh KH, Mooney DJ, Vlassak JJ, Suo Z (2012) Highly stretchable and tough hydrogels. Nature 489(7414):133
Kolvin I, Kolinski JM, Gong JP, Fineberg J (2018) How supertough gels break. Phys Rev Lett 121(13):135501
You Y, Yang J, Zheng Q, Wu N, Lv Z, Jiang Z (2020) Ultra-stretchable hydrogels with hierarchical hydrogen bonds. Sci Rep 10(1):11727
Yang C, Yin T, Suo Z (2019) Polyacrylamide hydrogels. I. Network imperfection. J Mech Phys Solids 131:43
Liu J, Yang C, Yin T, Wang Z, Qu S, Suo Z (2019) Polyacrylamide hydrogels. II. Elastic dissipater. J Mech Phys Solids 133:103737
Wang Y, Yin T, Suo Z (2021) Polyacrylamide hydrogels. III. Lap shear and peel. J Mech Phys Solids 150:104348
Hassan S, Kim J et al (2022) Polyacrylamide hydrogels. IV. Near-perfect elasticity and rate-dependent toughness. J Mech Phys Solids 158:104675
Wang M, Shi S, Fineberg J (2023) Tensile cracks can shatter classical speed limits. Science 381(6656):415
Yang TH (2008) Recent applications of polyacrylamide as biomaterials. Recent Patents Mater Sci 1(1):29
Kandow CE, Georges PC, Janmey PA, Beningo KA (2007) Polyacrylamide hydrogels for cell mechanics: steps toward optimization and alternative uses. Methods Cell Biol 83:29
Zhou Y, Jin L (2023) Mechanics underpinning phase separation of hydrogels. Macromolecules 56(2):426
Kim J, Yin T, Suo Z (2022) Polyacrylamide hydrogels. V. Some strands in a polymer network bear loads, but all strands contribute to swelling. J Mech Phys Solids 168:105017
Hong W, Zhao X, Zhou J, Suo Z (2008) A theory of coupled diffusion and large deformation in polymeric gels. J Mech Phys Solids 56(5):1779
Chester SA, Anand L (2010) A coupled theory of fluid permeation and large deformations for elastomeric materials. J Mech Phys Solids 58(11):1879
Chester SA, Anand L (2011) A thermo-mechanically coupled theory for fluid permeation in elastomeric materials: application to thermally responsive gels. J Mech Phys Solids 59(10):1978
Chester SA, Di Leo CV, Anand L (2015) A finite element implementation of a coupled diffusion-deformation theory for elastomeric gels. Int J Solids Struct 52:1
Mao Y, Anand L (2018) A theory for fracture of polymeric gels. J Mech Phys Solids 115:30
Bouklas N, Landis CM, Huang R (2015) A nonlinear, transient finite element method for coupled solvent diffusion and large deformation of hydrogels. J Mech Phys Solids 79:21
Yang Y, Guo H, Du Z, Hong W, Lu T, Wang T (2022) Rate-dependent fracture of hydrogels due to water migration. J Mech Phys Solids 167:105007
Takigawa T, Urayama K, Morino Y, Masuda T (1993) Simultaneous swelling and stress relaxation behavior of uniaxially stretched polymer gels. Polym J 25(9):929
Fujine M, Takigawa T, Urayama K (2015) Strain-driven swelling and accompanying stress reduction in polymer gels under biaxial stretching. Macromolecules 48(11):3622
Kalcioglu ZI, Mahmoodian R, Hu Y, Suo Z, Van Vliet KJ (2012) From macro-to microscale poroelastic characterization of polymeric hydrogels via indentation. Soft Matter 8(12):3393
Rice JR, Cleary MP (1976) Some basic stress diffusion solutions for fluid-saturated elastic porous media with compressible constituents. Rev Geophys 14(2):227
Detournay E, Cheng AHD (1993) Fundamentals of poroelasticity in analysis and design methods. Elsevier, Amsterdam, pp 113–171
Detournay E, Garagash D (2003) The near-tip region of a fluid-driven fracture propagating in a permeable elastic solid. J Fluid Mech 494:1
Lecampion B, Bunger A, Zhang X (2018) Numerical methods for hydraulic fracture propagation: a review of recent trends. J Nat Gas Sci Eng 49:66
Viesca RC (2021) Self-similar fault slip in response to fluid injection. J Fluid Mech 928:A29
Taureg A, Kolinski JM (2020) Dilute concentrations of submicron particles do not alter the brittle fracture of polyacrylamide hydrogels. arXiv preprint arXiv:2004.04137
Benkley T, Li C, Kolinski J (2023) Estimation of the deformation gradient tensor by particle tracking near a free boundary with quantified error. Exp Mech 63(7):1255
Chenouard N, Smal I, De Chaumont F, Maška M, Sbalzarini IF, Gong Y, Cardinale J, Carthel C, Coraluppi S, Winter M et al (2014) Objective comparison of particle tracking methods. Nat Methods 11(3):281
Kähler CJ, Scharnowski S, Cierpka C (2012) On the resolution limit of digital particle image velocimetry. Exp Fluids 52:1629
Allan DB, Caswell T, Keim NC, van der Wel CM, Verweij RW (2024) Soft-matter/trackpy: v0.6.2. https://doi.org/10.5281/zenodo.10696534
Blaber J, Adair B, Antoniou A (2015) Ncorr: open-source 2D digital image correlation Matlab software. Exp Mech 55(6):1105
Suresh S, Tschegg EK (1987) Combined mode I–mode III fracture of fatigue-precracked alumina. J Am Ceram Soc 70(10):726
Xu G, Bower A, Ortiz M (1994) An analysis of non-planar crack growth under mixed mode loading. Int J Solids Struct 31(16):2167
Lazarus V, Leblond JB, Mouchrif SE (2001) Crack front rotation and segmentation in mixed mode I+ III or I+ II+ III. Part II: comparison with experiments. J Mech Phys Solids 49(7):1421
Lin B, Mear M, Ravi-Chandar K (2010) Criterion for initiation of cracks under mixed-mode I+ III loading. Int J Fract 165:175
Pham K, Ravi-Chandar K (2017) The formation and growth of echelon cracks in brittle materials. Int J Fract 206(2):229
Pham K, Ravi-Chandar K (2016) On the growth of cracks under mixed-mode I+ III loading. Int J Fract 199:105
Garagash DI, Germanovich LN (2022) Notes on propagation of 3D buoyant fluid-driven cracks. arXiv preprint arXiv:2208.14629
Zia H, Lecampion B, Zhang W (2018) Impact of the anisotropy of fracture toughness on the propagation of planar 3D hydraulic fracture. Int J Fract 211:103
Zia H, Lecampion B (2020) PyFrac: A planar 3D hydraulic fracture simulator. Comput Phys Commun 255:107368
Wang M, Zhang P, Shamsi M, Thelen JL, Qian W, Truong VK, Ma J, Hu J, Dickey MD (2022) Tough and stretchable ionogels by in situ phase separation. Nat Mater 21(3):359
Qi Y, Li X, Venkata SP, Yang X, Sun TL, Hui CY, Gong JP, Long R (2024) Mapping deformation and dissipation during fracture of soft viscoelastic solid. J Mech Phys Solids 105595
Kessler M, Yuan T, Kolinski JM, Amstad E (2023) Influence of the degree of swelling on the stiffness and toughness of microgel-reinforced hydrogels. Macromol Rapid Commun 44(16):2200864
Wei C, Zhou Y, Hsu B, Jin L (2024) Exceptional stress-director coupling at the crack tip of a liquid crystal elastomer. J Mech Phys Solids 183:105522
Wang J, Zhu B, Hui CY, Zehnder AT (2023) Delayed fracture caused by time-dependent damage in PDMS. J Mech Phys Solids 181:105459
Slabaugh GG (1999) Computing Euler angles from a rotation matrix. https://www.gregslabaugh.net/publications/euler.pdf (visité le 01/08/2018)
Hodgdon JA, Sethna JP (1993) Derivation of a general three-dimensional crack-propagation law: a generalization of the principle of local symmetry. Phys Rev B 47(9):4831
Rice JR, Ben-Zion Y, Klm KS (1994) Three-dimensional perturbation solution for a dynamic planar crack moving unsteadily in a model elastic solid, on perturbations of plane cracks. J Mech Phys Solids 42(5):813
Movchan A, Gao H, Willis J (1998) On perturbations of plane cracks. Int J Solids Struct 35(26–27):3419
Leblond JB, Lebihain M (2023) An extended Bueckner–Rice theory for arbitrary geometric perturbations of cracks. J Mech Phys Solids 172:105191
Erdogan F, Sih G (1963) On the crack extension in plates under plane loading and transverse shear. J Basic Eng 85(4):519
Gol’dstein RV, Salganik RL (1974) Brittle fracture of solids with arbitrary cracks. Int J Fract 10(4):507
Slepyan L (1993) Principle of maximum energy dissipation rate in crack dynamics. J Mech Phys Solids 41(6):1019
Amestoy M, Leblond J (1992) Crack paths in plane situations-II. Detailed form of the expansion of the stress intensity factors. Int J Solids Struct 29(4):465
Rozen-Levy L, Kolinski JM, Cohen G, Fineberg J (2020) How fast cracks in brittle solids choose their path. Phys Rev Lett 125(17):175501
Kalcioglu ZI, Mahmoodian R, Hu Y, Suo Z, Van Vliet KJ (2012) From macro-to microscale poroelastic characterization of polymeric hydrogels via indentation. Soft Matter 8(12):3393
Galli M, Comley KS, Shean TA, Oyen ML (2009) Viscoelastic and poroelastic mechanical characterization of hydrated gels. J Mater Res 24(3):973
Hu Y, Zhao X, Vlassak JJ, Suo Z (2010) Using indentation to characterize the poroelasticity of gels. Appl Phys Lett 96(12) (2010)
Acknowledgements
Participants in the CECAM workshop, “3D cracks and crack stability” are gratefully acknowledged for stimulating discussions.
Funding
Open access funding provided by EPFL Lausanne
Author information
Authors and Affiliations
Contributions
C.L. and J.M.K. conceived the study and wrote the manuscript. C.L. collected, processed and analyzed the data. D.Z. processed and analyzed the data. D.D. analyzed the data.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
The research was funded by Swiss National Science Foundation Grant No. 200021_197162.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Li, C., Zubko, D., Delespaul, D. et al. 3D characterization of kinematic fields and poroelastic swelling near the tip of a propagating crack in a hydrogel. Int J Fract (2024). https://doi.org/10.1007/s10704-024-00810-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10704-024-00810-6