
Abstract
We present a new mathematical programming framework that is adaptable to a variety of spatially explicit landscape problems in environmental investment, conservation, and land-use planning, transport planning, and agriculture. As part of capturing spatial interdependencies, the framework considers decision variables at two levels, finely spaced grid cells and landholdings. We applied the framework to an environmental investment problem using objective functions representing biodiversity and carbon sequestration. We also tested the model to optimize the path of a road through part of the landscape. Using the Nambucca case study in eastern Australia, we applied a hybrid greedy randomised adaptive search procedure (GRASP) to find solutions to the model.





Similar content being viewed by others
References
Aerts, J. C., Herwijnen, M., & Stewart, T. J. (2003). Using simulated annealing and spatial goal programming for solving a multi site lane use allocation problem. Evolutionary Multi-Criterion Optimisation Proceedings, 2632, 448–463.
Aerts, J. C., & Heuvelink, G. B. (2002). Using simulated annealing for resource allocation. Geographical Information Science, 16, 571–587.
Arthur, J. L., Hachey, M., Sahr, K., Huso, M., & Kiester, A. R. (1997). Finding all solutions to the reserve site selection problem: Formulation and computational analysis. Environmental and Ecological Statistics, 4, 153–165.
Arthur, J. L., Haight, R. G., Montgomery, C. A., & Polasky, S. (2002). Analysis of the threshold and expected coverage approaches to the probabilistic reserve site selection problem. Environmental Modelling and Assessment, 7, 81–89.
Bertomeu, M., & Romero, C. (2002). Forest management optimisation models and habitat diversity: A goal programming approach. Journal of the Operational Research Society, 53, 1175–1184.
Boston, K., & Bettinger, P. (1999). An analysis of Monte Carlo integer programming, simulated annealing and tabu search heuristics for solving spatial harvest scheduling problems. Forest Science, 45(2), 292–301.
Clemens, M. A., ReVelle, C. S., & Williams, J. C. (1999). Reserve design for species preservation. European Journal of Operational Research, 112, 273–283.
Davis, L. (1991). Handbook on Genetic Algorithms. New York: Reinhold.
Dahlin, B., & Sallnas, O. (1993). Harvest scheduling under adjacency constraints – A case study from Swedish sub-Alpine region. Scandinavian Journal of Forest Science, 8, 281–290.
Delorme, X., Gandibleux, X., & Rodriguez, J. (2005). GRASP for set packing problems. European Journal of Operational Research, 153, 564–580.
Faith, D. P. (2003). Environmental diversity (ED) as surrogate information for species-level biodiversity. Ecography, 26(3), 374–379.
Faith, D. P., & Walker, P. A. (1996). Environmental diversity: On the best-possible use of surrogate data for assessing the relative biodiversity of sets of areas. Biodiversity and Conservation, 5, 399–415.
Feo, T. A., & Resende, M. G. (1989). A probabilistic heuristic for a computationally difficult set covering problem. Operations Research Letters, 8, 67–71.
Glover, F. (1993). A user guide to tabu search. Annals of Operations Research, 41, 3–28.
Hajkowicz, S., Perraud, J. M., Dawes, W., & DeRose, R. (2005). The strategic investment model: A tool for mapping optimal environmental expenditure. Environmental Modelling and Software, 20, 1251–1262.
Hajkowicz, S., Perraud, J., De-Rose, R., Austin J., & Dawes, W. (2003). The strategic landscape investment model. Final Report for the NSW Department of Sustainable Natural Resources, CSIRO Division of Land and Water.
Kirkpatrick, S., Gelatt, C. D., & Vecchi, M. P. (1983). Optimisation by simulated annealing. Science, 220, 671–680.
Lockwood, C., & Moore, T. (1993). Harvest scheduling with spatial constraints: A simulated annealing approach. Canadian Journal of Forest Research, 23(3), 468–478.
Margules, C. R., Nicholls A. O., & Pressey, R. L. (1988). Selecting networks of reserves to maximise biological diversity. Biological Conservation, 43, 63–76.
Marti, R., Luguna, M., & Glover, F. (2006). Principles of scatter search. European Journal of Operational Research, 169, 359–372.
McDonnnell, M. D., Possingham, H., Ball, I. R., & Cousins, E. A. (2002). Mathematical methods for spatially cohesive reserve design. Environmental Modelling and Assessment, 7, 107–114.
Mladenovic, N., & Variable, P. (1997). Hansen, neighbourhood search. Computers and Operations Research, 24, 1097–1100.
Montagu, K. D., Cowie, A., Rawson, A., Wilson, B., & George, B. (2003). NSW environment services scheme carbon sequestration predictor – Background, user notes and assumptions, version 1.0. Technical publication no. 68. Sydney: State Forests of NSW.
Nalle, D. J., Arthur, J. T., Montgomery, C. A., & Sessions, J. (2002). Economic and spatial impacts of an existing reserve network on future augmentation. Environmental Modelling and Assessment, 7, 99–105.
Onal, H., & Briers, B. A. (2002). Incorporating spatial criteria in optimum reserve network selection. Proceedings of the Royal Society of London Series B-Biological Sciences, 267, 2437–2441.
Possingham, H. (2001). Models, problems and algorithms: Perceptions about their application to conservation biology. Proceedings of the 2001 International Congress on Modelling and Simulation, 1, 1–6.
Pressey, R. L., Humphries, C. J., Margules, C. R., Vane-Wright R. I., & Williams, P. H. (1993). Beyond opportunism: Key principles for systematic reserve selection. Trends in Ecology and Evolution, 8, 124–128.
Resende, M. G., & Ribeiro, C. C. (2003). A GRASP with path re-linking for private virtual circuit routing. Networks, 41, 104–114.
Robertson, A. J. (2001). A greedy randomised adaptive local search procedure (GRASP) implementations for the multi-dimensional assignment problem. Computational Optimisation and Applications, 19, 145–164.
Roebeling, P. C., Smith, D. M., & van Grieken, M. E. (2006). Exploring environmental–economic benefits from agri-industrial diversification in the sugar industry: An integrated land use and value chain approach. Proceedings of the 26th Conferece of the International Association of Agricultural Economics, Queensland, Australia.
Semet, F., & Taillard, E. (1993). Solving real life vehicle routing problems efficiently using tabu search. Annals of Operations Research, 41, 469–488.
Urban, D., & Keitt, T. (2001). Landscape connectivity: A graph theoretic perspective. Ecology, 82, 1205–1218.
Vane-Wright, R. I., Humphries, C. J., & Williams, P. H. (1991). What to protect? Systematics and the agony of choice. Biological Conservation, 55, 235–254.
Williams, J. C., & ReVelle, C. S. (1996). A 0–1 programming approach to delineating protected reserves. Environment and Planning, B 23, 607–624.
Williams, J. C., & ReVelle, C. S. (1998). Reserve assemblage of critical areas: A 0–1 programming approach. European Journal of Operational Research, 104, 497–509.
Acknowledgment
We wish to thank Dr. Peter Roebeling and Dr. Ryan McAllister of CSIRO, along with the anonymous referee of Environmental Modelling and Assessment for their suggestions to improve this paper.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
1.1 Identification and Quantification of Land Parcels
The purpose of this appendix is to provide an algorithm for calculating \( P^{k}_{p} \) from X, which would then be used to provide values to a k. The proposed algorithm performs the task in approximately linear time with respect to the total number of cells in X.
The example in Fig. 6 in represents X where the marked cells are, when \( x^{k}_{{ij}} = 1 \) for one of k ∈ K. This example is used to illustrate the working of the proposed algorithm. The proposed algorithm (Algorithm A1) works searching across the grid cells row by row and allocates each marked cell to a connected land parcel. If the marked cell is not a neighbor (i.e., not connected) to a marked cell that has been searched so far, it will be added to a new parcel. If it is a neighboring cell (i.e., immediately above, diagonally above, or to the left) to a marked cell that has been searched so far, it will be allocated the same parcel number as the neighboring cell. If the marked neighboring cells belong to two different parcels, then the smallest parcel number will be allocated to the current cell (Fig. 7). This also means the two parcels that are neighboring are actually one parcel, as they are connected by the current marked cell. The marked cells in the parcel with the larger parcel value are re-allocated to the parcel with the smaller parcel number. This is shown in Fig. 7 using the top four rows of Fig. 6.

Sample landscape defined by X divided into 15 × 15 equally spaced cells where the black shaded cells are classed as marked

The current cell is highlighted by a question mark and has two neighboring marked cells of different parcel values. The cell highlighted by a question mark will provide a connection between land parcels 2 and 3, leading to a single land parcel shown in the bottom half of the figure
-
Algorithm A1
FOR each k ∈ K
p = 0
FOR each i ∈ I
-
FOR each j ∈ J WHERE \( x^{k}_{{ij}} = 1 \)
-
IF \( w_{{i - 1j - 1}} x^{k}_{{i - 1j - 1}} + w_{{i - 1j}} x^{k}_{{i - 1j}} + w_{{i - 1j + 1}} x^{k}_{{i - 1j + 1}} + w_{{ij - 1}} x^{k}_{{ij - 1}} = 0 \) THEN
-
p = p + 1
w ij = p
ADD the position i ∈ I, j ∈ J to \( P^{k}_{p} \)
-
-
ENDIF
IF \( w_{{i - 1j - 1}} x^{k}_{{i - 1j - 1}} + w_{{i - 1j}} x^{k}_{{i - 1j}} + w_{{i - 1j + 1}} x^{k}_{{i - 1j + 1}} + w_{{ij - 1}} x^{k}_{{ij - 1}} > 0 \) THEN
-
p′ = min \( {\left( {w_{{i - 1j - 1}} x^{k}_{{i - 1j - 1}} ,w_{{i - 1j}} x^{k}_{{i - 1j}} ,w_{{i - 1j + 1}} x^{k}_{{i - 1j + 1}} ,w_{{ij - 1}} x^{k}_{{ij - 1}} } \right)} \)
p″ = max \( {\left( {w_{{i - 1j - 1}} x^{k}_{{i - 1j - 1}} ,w_{{i - 1j}} x^{k}_{{i - 1j}} ,w_{{i - 1j + 1}} x^{k}_{{i - 1j + 1}} ,w_{{ij - 1}} x^{k}_{{ij - 1}} } \right)} \)
IF p ′= p″ THEN
-
w ij = p′
ADD the position i ∈ I, j ∈ J to \( P^{k}_{{p^{\prime } }} \)
-
-
ENDIF
IF p′ ≠ p″ THEN
-
w ij = p′
ADD the position i ∈ I, j ∈ J to \( P^{k}_{{p^{\prime } }} \)
FOR each position m ∈ I, n ∈ J in \( P^{k}_{{p^{} }} \)
-
w mn = p′
MOVE position m ∈ I, n ∈ J from \( P^{k}_{{p^{} }} \) to \( P^{k}_{{p^{\prime } }} \)
-
-
ENDFOR
-
-
ENDIF
-
-
ENDIF
-
-
ENDFOR
-
-
ENDFOR
ENDFOR
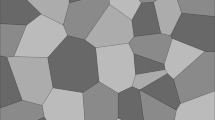
An application of Algorithm A1 to Fig. 6 will give the parcel allocation of Fig. 8.

Landscape of Fig. 6 with identified parcels
If m is the total number of cells in X, the computational complexity of Algorithm 1 is of O(m) except when a cell is encountered that has neighboring marked cells of differing parcel values. However, such occurrences are usually very infrequent and should have negligible impact on the computational complexity.
1.2 Application within the GRASP
Within the GRASP (or any other search heuristic), Algorithm A1 would be very CPU intensive if used when evaluating the impact on F(X,Y) from every ADD/DROP or SWAP move. Given that the ADD/DROP or SWAP move only changes the value of up to two landholding decision variables \( y^{k}_{h} \in Y \), then only the change in a k (denoted by \( \widehat{a}^{k} \)) needs to be calculated rather than recalculating \( P^{k}_{p} \) for all grid cells and land uses in X. A separate algorithm is applied if \( y^{k}_{h} \) is set to 1 versus set to 0 using the ADD/DROP or SWAP move. Algorithm A2 shows the case for setting \( y^{k}_{h} \) to 1:
-
Algorithm A2: IF \( y^{k}_{h} \) was changed from 0 to 1
SL = {}
FOR each cell, i ∈ I, j ∈ J in Z h
-
IF \( w_{{i - 1j - 1}} x^{k}_{{i - 1j - 1}} + w_{{i - 1j}} x^{k}_{{i - 1j}} + w_{{i - 1j + 1}} x^{k}_{{i - 1j + 1}} + w_{{ij - 1}} x^{k}_{{ij - 1}} + w_{{ij + 1}} x^{k}_{{ij + 1}} + w_{{i + 1j}} x^{k}_{{i + 1j}} + w_{{i + 1j + 1}} x^{k}_{{i + 1j + 1}} + w_{{i + 1j - 1}} x^{k}_{{i + 1j - 1}} > 0 \)
THEN
-
\( \begin{array}{*{20}c} {s_{1} = w_{{i - 1j - 1}} x^{k}_{{i - 1j - 1}} , \cdot s_{2} = w_{{i - 1j}} x^{k}_{{i - 1j}} , \cdot s_{3} = w_{{i - 1j + 1}} x^{k}_{{i - 1j + 1}} , \cdot s_{4} = w_{{ij - 1}} x^{k}_{{ij - 1}} } \\ {s_{5} = w_{{ij + 1}} x^{k}_{{ij + 1}} , \cdot s_{6} = w_{{i + 1j}} x^{k}_{{i + 1j}} , \cdot s_{7} = w_{{i + 1j + 1}} x^{k}_{{i + 1j + 1}} , \cdot s_{8} = w_{{i + 1j - 1}} x^{k}_{{i + 1j - 1}} } \\ \end{array} \)
FOR r = 1 to 8
-
IF s r > 0 THEN
-
ADD the value of s r to SL if it does not already belong to it
-
-
ENDIF
-
-
ENDFOR
-
-
ENDIF
-
-
ENDFOR
LET sl = number of entries in SL
\( \widehat{a}^{k} = a^{k} + 1 - sl \)
Algorithm A2 calculates the change in the number of land parcels of land-use k ∈ K by setting \( y^{k}_{h} = 1 \). A very similar algorithm is applied if the ADD/DROP or SWAP move are applied to the grid cell level rather than landholding. When changing \( y^{k}_{h} \) from 1 to 0, there is the potential to split a land parcel into two parcels. An example is shown in Fig. 9 (in the case of applying ADD/DROP to decision variables at grid cell level), and an algorithm needs to identify which cells to allocate to each parcel given the additional parcel created. By setting \( x^{k}_{{ij}} \) or \( y^{k}_{h} \) to 0, it was difficult to calculate the number of land parcels, \( \widehat{a}^{k} \), compared to the case of setting the decision variables to 1 (Algorithm A). This difficulty was overcome by applying Algorithm A1 to the grid cells in landholding \( y^{k}_{h} \) and its neighboring grid cells (or buffering cells around the boundary of land holding h ∈ H). This gives the change in \( P^{k}_{p} \), which \( \widehat{a}^{k} \) can be calculated.

Example of removing the marked status of a cell to create two parcels, where a represents the original parcel before changing \( x^{k}_{{ij}} \) of one of the cells from 1 to 0, b shows the changed cell, and c shows the re-allocation of parcel numbers to the marked cells
Rights and permissions
About this article
Cite this article
Higgins, A.J., Hajkowicz, S. A Model for Landscape Planning Under Complex Spatial Conditions. Environ Model Assess 13, 459–471 (2008). https://doi.org/10.1007/s10666-007-9117-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10666-007-9117-3