
Abstract
Five analytical solutions are presented for processes of linear viscoelastic, homogeneous, and isotropic solids around freshly opened bores / tunnels in various initial stress fields. The solutions are obtained via a simple and direct realization of Volterra’s principle. This realization is based on an appropriate decomposition of the known solution of the corresponding elastic problem and leads to ordinary differential equations in the time variable in the viscoelastic case. Fairly rich temporal behaviors are revealed.
Similar content being viewed by others


1 Introduction
Creating a bore or tunnel in a solid medium modifies the mechanical state, and this change is usually investigated in the modeling framework of elasticity (see, e.g., [1,2,3,4,5,6,7,8,9]). However, as opposed to prompt elastic response, opening a tunnel may in reality induce changes that occur at a time scale of years and can evolve to quite problematic situations—as illustrated by images in [10,11,12,13,14]—, and the medium in the neighborhood of the tunnel typically exhibits rheological, delayed and damped, behavior. While there can be various reasons behind this, a frequently useful modeling of such changes is provided by linear viscoelastic extensions of elasticity. Especially, even without detailed knowledge about the reasons, one can have an effective model that is a natural choice among the many mathematically existing possibilities: A systematic derivation of such models [15] reveals that there is a universal hierarchy within the possible rheological extensions of elasticity, among which the level-1 complexity is manifested by the Kluitenberg–Verhás model family, which includes the well-known and classic Kelvin–Voigt, Maxwell, Poynting–Thomson–Zener (a.k.a. standard), and Jeffreys models. The coefficients of the model family have to be fitted based on experimental data, as is done, for example, in the Anelastic Strain Recovery method of determining 3D in situ stress [16,17,18], where all the Kluitenberg–Verhás coefficients have been found to be needed, both in the deviatoric part of stress and strain and in the spherical part.
Various other fields of engineering also find such rheological models relevant, for solid materials like plastics, asphalt, biomaterials, etc., Pressurizing of thick-walled plastic tubes (an example that also turns out to be related to the present paper, as revealed at the end of the Conclusions) is just one example among the many, and the damping and delaying properties of such materials are not necessarily disadvantageous but can also be technologically benefitted, as utilized, for instance, for absorbing vibration [19]. All these motivate the development of solution methods for rheology and, as part of it, for linear viscoelasticity.
A known general treatment of linear viscoelastic problems is based on integral equations [20,21,22,23]. Within this framework, Volterra’s principle [24] has also been realized. Volterra’s principle says, in brief, that the solution of a linear viscoelastic problem can be derived from the solution of the corresponding elastic one. This integral equation-based approach has been utilized to find various numerical solutions. Obtaining analytical solutions is far less straightforward since an operator inverse is to be calculated analytically.
In order to achieve analytical solutions, the strong heuristic power of Volterra’s principle has recently been revealed to have simpler and more direct manifestation in certain examples [25]. In these cases, the viscoelastic solution has been obtained by replacing the elasticity coefficients of the corresponding elastic solution by time-dependent functions and by determining these time dependencies from the emerging ordinary differential equations. In one of the treated examples, the result has proved to reproduce the known solution gained by direct means in [26] (while the other cases appear to be new results).
The realizations presented in [25] have, however, enabled to treat only a limited range of problems. Here, we present a considerable generalization that—while still not being as general as the integral equation-based formulation—is shown here to cover numerous practically interesting situations.
The approach introduced here can be summarized as follows:
-
1.
we decompose the known stress and strain solutions of the elastic problem corresponding to the fully opened bore/tunnel according to different dependencies on the elastic coefficients,Footnote 1
-
2.
we model the gradual opening of the bore/tunnel via time-dependent rescaling of the boundary conditions and rescale the components of the elastic solution accordingly,
-
3.
we assume the solution of the viscoelastic problem as a time-dependent linear combination of the identified elastic components and solve the emerging set of linear ordinary differential equations,
-
4.
the displacement field is derived from the strain solution via Cesàro’s formula.
In Sect. 2 of the paper, the framework is specified, including the basic equations and the aspect of boundary conditions. Section 3 describes the method in general terms. Then, in Sect. 4, five applications are provided, with figures that demonstrate the characteristics of the obtained solutions. Section 5 closes the paper with conclusions and an outlook.
2 Elasticity, viscoelasticity, and the class of problems to treat
We consider purely mechanical problems of homogeneous and isotropic continuous media, and our aim is to determine the displacement field \(\varvec{u}\), the strain field \(\varvec{\varepsilon }\) and the stress field \(\varvec{\sigma }\) (where both \( \varvec{\varepsilon }\) and \( \varvec{\sigma }\) are symmetric tensors). We work in the force equilibrial approximation, i.e., when acceleration is neglected:Footnote 2

where \( \varrho \) is mass density and \(\varrho {\mathbf {g}}\) is volumetric force density (assumed to be time independent), and  and
and  are the nabla operators acting to the left and to the right, respectively (reflecting proper tensorial orderFootnote 3).
are the nabla operators acting to the left and to the right, respectively (reflecting proper tensorial orderFootnote 3).
Concerning \( \varvec{\varepsilon }\), we stay in the small-strain approximation, which then imposes the geometric compatibility equation in the form

According to mathematics, to a symmetric tensor field \( \varvec{\varepsilon }\) with property (2), there exists a vector field \( \varvec{u}^\text {Cauchy}\)—called hereafter Cauchy vector potential—from which \( \varvec{\varepsilon }\) can be obtained as

The Cauchy vector potential is not unique for a given \( \varvec{\varepsilon }\), and all Cauchy vector potentials can be derived from the strain field according to Cesàro’s formula (see, e.g., [27]),

with \(^{\mathrm{A}_{1,3}}\) denoting antisymmetrization in the first and third tensorial indices, where each of the position vector \(\mathbf {r}_0\), the path of integration, the vector function \(\varvec{u}_0(t)\), and the antisymmetric tensor function \(\varvec{\Omega }(t)\) is arbitrary. The displacement field \( \varvec{u}\) is one of these Cauchy vector potentials so when we wish to reconstruct \(\varvec{u}\) from the strain field then we need to fix these uncertainties (this rigid-body motion freedom) using symmetry arguments and other physically plausible considerations.
In case of linear elasticity (for a homogeneous and isotropic medium), connection between stress and strain is provided by Hooke’s law,
in the deviatoric–spherical separation, where \(\, \varvec{\sigma }^{\mathrm{s}}=\frac{1}{3}({\text {tr}}\varvec{\sigma })\mathbf {1} \,\) denotes the spherical part—which is proportional to the identity tensor \(\mathbf {1}\)—, while \(\, \varvec{\sigma }^{\mathrm{d}}=\varvec{\sigma }-\varvec{\sigma }^{\mathrm{s}} \,\) is the deviatoric (traceless) part; furthermore, \(E^{\mathrm{d}}=2G\) is the deviatoric elasticity coefficient and \(E^{\mathrm{s}}=3K\) is the spherical one (\(G\) being the shear modulus and \(K\) the bulk modulus).
For linear viscoelastic models of solids, one can generalize Hooke’s law by replacing the elasticity coefficients with polynomials of the time derivative operator. Namely,
where the stress-related operators \({\mathcal {S}}^{\mathrm{d}}\), \({\mathcal {S}}^{\mathrm{s}}\), and the strain related ones \({\mathcal {E}}^{\mathrm{d}}\), \({\mathcal {E}}^{\mathrm{s}}\) are
with constant coefficients \( \tau ^{\mathrm{d}}_i, \tau ^{\mathrm{s}}_j, E^{\mathrm{d}}_k, E^{\mathrm{s}}_l \). Each time derivative term brings in a time scale (via its coefficient).
For an illustration of what viscoelastic material models are covered by (6)–(8), see Appendix A, where it is shown that models given in a Prony series form can all be re-expressed as (6)–(8).
In our applications, we concentrate on the Kluitenberg–Verhás model family [15, 28]
hereafter, overdot abbreviates partial time derivative. (Note that the small-strain assumption allows to approximate the substantial time derivative with the partial time derivative.)
In the case of elasticity, equations (1), (2), and (5) form the system of equations to be solved. Together with appropriate boundary conditions imposed at the boundaries of the spatial domain considered, the solution exists and is unique; however, to obtain this solution is not necessarily simple, since (5) poses separate conditions for the deviatoric and spherical parts, while (1), (2), and the boundary conditions prescribe the requirements for the sum of the deviatoric and spherical parts.
When one deals with the above-described viscoelastic generalization of the problem then, in addition to (1), (2), (6) and the boundary conditions (which may be time dependent in general), initial conditions are also required to ensure uniqueness of the solution, since the constitutive equations contain time derivatives [see (7) and (8)]. In the viscoelastic case, all fields are functions of both time and space, and all equations and boundary conditions have to be satisfied for all time instants, which raises an even more complicated task than for the elastic counterpart. Hence, inspired by Volterra’s above-mentioned idea, we wish to utilize the fact that the elastic solution satisfies all the spatial requirements so, by relying on the structure of the elastic solution, we reduce the problem to solving a set of temporal differential equations.
As the first step, we separate the effect of the force density by subtracting some such time-independent fields \({\bar{\varvec{\sigma }}}\) and \({\bar{\varvec{\varepsilon }}}\)—henceforth: primary fields—that satisfy the equations



[note that, for time-independent stress and strain fields, (6) gets simplified to Hooke’s law with \(\, E^{\mathrm{d}}= E^{\mathrm{d}}_0 \,\), \(\, E^{\mathrm{s}}= E^{\mathrm{s}}_0 \,\), cf. (7)–(8)]. Then the difference fields—henceforth: complementary fields—
satisfy the homogeneous equations



Naturally, in general, this transformation modifies the initial and boundary conditions, which are to be taken into account during the calculations.
If the spatial domain filled with the medium has more than one boundary (more than one connected boundary surface) then the problem can be divided into subproblems in which only one boundary condition is nonzero (the boundary condition is nonzero only on one connected boundary surface). Henceforth, we always analyze one such subproblem. Thanks to linearity of all equations involved, the sum of such subsolutions yields solution for a whole problem.
In order to provide models for tunnels, we consider problems with boundary conditions that are specified for stress rather than displacement. More closely, the normal component of stress is to be prescribed as the function of time. This time dependence will be allowed with the limitation that it must mean a space-independent rescaling \(\uplambda (t)\) of the boundary condition—like gradual loading/unloading of a surface where loading may be space dependent but the ratio of normal stress values at two different boundary points is time independent. In other words, the boundary condition must realize a homogeneous amplification/tuning along the boundary. The time-dependent multiplier \(\uplambda (t)\) can be quite arbitrary, the only restriction being that it be sufficiently many times differentiable. For gradual switching on, like when modeling drilling, it can be chosen as

Corresponding to such a time-dependent homogeneous rescaling of the boundary condition, the solution of the elastic problem also gets rescaled—space independently rescaled—by the factor \(\, \uplambda (t) \,\).
Another remarkable property of the elastic solution (at any fixed \( t \)) is that, based on dimensional reasoning, dependence of the stress solution on \(E^{\mathrm{d}}\) and \(E^{\mathrm{s}}\) must be such that stress only depends on the dimensionless ratio
In other words, it depends only on the Poisson’s ratio \( \nu \), which is related to \( \eta \) as
This property is, naturally, directly visible in the examples considered below. Accordingly, it proves beneficial to use, instead of strain, a multiple of it that has the dimension of stress. This can be simply achieved by
called hereafter stress-dimensioned strain. (Note that, for solids, \( E^{\mathrm{s}}\) is always positive.) Correspondingly,
The compatibility equation (15) remains in the same form for \({\hat{\varvec{\zeta }}}\):

With \( {\hat{\varvec{\zeta }}}\), Hooke’s law is simplified to
Then, it is apparent that, in a solution of an elastic problem with stress boundary condition, \( {\hat{\varvec{\zeta }}}\) also depends on the elasticity coefficients through \(\eta \) only [see (18)]. It is to be emphasized that, while customarily one only focuses on the space dependence of an elastic solution, for the solution method described here, dependence on the elasticity coefficients \(E^{\mathrm{d}}\), \(E^{\mathrm{s}}\)—more closely, on \( \eta \)—will also be of central importance.
In parallel, the viscoelastic problem characterized by (16) imposes
between stress and stress-dimensioned strain, where [cf. (7)–(8)]
(as has been mentioned earlier, \(E^{\mathrm{s}}_0 \) of the viscoelastic case plays the role of \( E^{\mathrm{s}}\) of the Hooke case).
3 The method of four elastic spatial pattern sets
For a fixed \( \eta \), the elastic solution satisfies the spatial requirements (14), (22), and the boundary condition (at a given instant). This holds for any allowable \( \eta \) so the idea is to seek for the viscoelastic solution as a linear combination of elastic solutions with various \( \eta \)’s (the sum of their weights being 1, to fulfill the boundary condition). If the initial conditions can also be given as such a linear combination—and this is the case whenever the initial state of the continuum is a static, therefore, elastic oneFootnote 4—and if the time-dependent weights respect the temporal condition (6) then we have obtained the solution of the viscoelastic problem.
Although continuously many allowable \( \eta \)s exist, the corresponding elastic solutions may not be linearly independent. In order to explore the range of freedom we have, we decompose the elastic solution (for the boundary condition at some given instant):
where \(I\), \(J\) \(K\), and \(L\) are some integers—assumed finite throughout this paper—, \(a_i(\eta )\)’s are linearly independent coefficient functions, \(\varvec{\alpha }_i(\mathbf {r})\)’s are linearly independent space dependencies—called hereafter ‘spatial patterns’—, \(b_j(\eta )\)’s are also a set of linearly independent coefficient functions [not necessarily the same ones as the \(a_i(\eta )\)’s], \(\varvec{\beta }_j(\mathbf {r})\)’s are also linearly independent spatial patterns [not necessarily the same ones as the \(\varvec{\alpha }_i(\mathbf {r})\)’s], and the \(c_k(\eta )\)’s, \(d_l(\eta )\)’s, \(\varvec{\gamma }_k(\mathbf {r})\)’s, \(\varvec{\delta }_l(\mathbf {r})\)’s are analogous function sets.
These decompositions are different from expansions (Fourier etc.) where the expansion happens with respect some standard predefined function set. Here, the spatial patterns are specific to the given problem. Nevertheless, in practice, the decompositions may be straightforward to perform (as is the case in each of the examples considered below, as we will see): one needs to identify linearly independent \( \eta \) dependencies, and the corresponding \( \mathbf {r}\) dependencies—the spatial patterns—follow uniquely.
From (27), the expansions
follow due to Hooke’s law (23). Further relationships among the expansions are less direct, e.g., in all the examples presented in Sect. 4, the spherical parts of the \( \varvec{\alpha }_i(\mathbf {r}) \)’s are already linearly dependent and, hence, are ineligible as the independent spatial patterns \( \varvec{\delta }_l(\mathbf {r}) \) in \( {\hat{\varvec{\zeta }}}_{\mathrm{el}}^\mathrm{s} \) and \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}^\mathrm{s} \). Nevertheless, in all the examples, the decompositions can be readily performed. In parallel, the general conditions \(\, K\le I, \,\) \(\, L\le J, \,\) \(\, I\le K+L, \,\) \(\, J\le K+L \,\) are also easy to find: the first two follow from that taking the deviatoric (or spherical) part of linearly independent tensor-valued functions may decrease but cannot increase the number of linearly independent tensor-valued functions (accidental coalescences may happen), while the two remaining inequalities are due to that adding \( K \) terms and \( L \) terms may produce at most \( K + L \) linearly independent terms.
When the boundary condition is multiplied by the time-dependent factor \( \uplambda (t)\), the elastic solution gets rescaled accordingly:
Next, the solution of the viscoelastic problem \(\, \left( { {\hat{\varvec{\sigma }}}_{\mathrm{rheol}}(t, \mathbf {r}), {\hat{\varvec{\zeta }}}_{\mathrm{rheol}}(t, \mathbf {r}) }\right) \,\) is sought for in a form where the \( \eta \)-dependent factors of the spatial patterns are replaced by time-dependent factors. Now we see that, in spite of the continuously many possible \( \eta \)’s, the range of freedom is only finite dimensional: at most \( I \) dimensional in \( {\hat{\varvec{\sigma }}}\), \( J \) dimensional in \( {\hat{\varvec{\zeta }}}\), \( K \le I \) dimensional in \( {\hat{\varvec{\sigma }}}^\mathrm{d} \) and \( {\hat{\varvec{\zeta }}}^\mathrm{d} \), and \( L \le J \) dimensional in \( {\hat{\varvec{\sigma }}}^\mathrm{s} \) and \( {\hat{\varvec{\zeta }}}^\mathrm{s} \). Since the \( I \) functions \(a_i(\eta )\) are linearly independent, we can fix \(I\) values \( \eta _1, \eta _2, \ldots , \eta _m, \ldots , \eta _I \) for the stress solution and, analogously, \(J\) values \( \eta _1, \eta _2, \ldots , \eta _n, \ldots , \eta _J \) for the stress-dimensioned strain solution (whichever \( \eta \) sequence is the longer) where the functions \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}(\eta _m,\mathbf {r}) \) are linearly independent and expand the range of freedom spanned by the possible \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}(\eta ,\mathbf {r}) \)’s, and the \( {\hat{\varvec{\zeta }}}_{\mathrm{el}}(\eta _n,\mathbf {r}) \)’s act analogously for \( {\hat{\varvec{\zeta }}}_{\mathrm{el}}(\eta ,\mathbf {r}) \). The sequence \( \eta _1,\eta _2,\ldots ,\eta _m,\ldots ,\eta _{\max (I, J)} \) can be chosen arbitrarily: if the viscoelastic solution is fixed by the initial conditions uniquely then it will be invariant under the choice of the \( \eta \) sequence. The advantage of the \( I \) functions \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}(\eta _m,\mathbf {r}) = \sum _{i=1}^I a_i (\eta _m)\varvec{\alpha }_i(\mathbf {r}) \) over the \( I \) spatial patterns \( \varvec{\alpha }_i(\mathbf {r}) \) themselves is that the former ones satisfy the spatial condition (14) and, analogously, the \( {\hat{\varvec{\zeta }}}_{\mathrm{el}}(\eta _n,\mathbf {r}) \)’s respect (22). Accordingly, our ansatz
for the viscoelastic problem obeys both (14) and (22). The boundary condition imposes
and the only remaining requirement on the unknown coefficient functions \( \varphi _m(t)\), \( \psi _n(t)\) is (24).
For discussing (24), we need the relationship between the deviatoric part of the expansion of \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}(\eta ,\mathbf {r}) \) given in (26) and that of \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}^\mathrm{d}(\eta ,\mathbf {r}) \) seen in (28): the \( \varvec{\alpha }_i^\mathrm{d}(\mathbf {r}) \)’s may not be linearly independent but the \( \varvec{\gamma }_k(\mathbf {r}) \)’s are, hence, any \( \varvec{\alpha }_i^\mathrm{d}(\mathbf {r}) \) must be expressible as a linear combination of the \( \varvec{\gamma }_k(\mathbf {r}) \)’s. Analogous statements apply to the \( \varvec{\beta }_j^\mathrm{d}(\mathbf {r}) \)’s, \( \varvec{\alpha }_i^\mathrm{s}(\mathbf {r}) \)’s, and \( \varvec{\beta }_j^\mathrm{s}(\mathbf {r}) \)’s so altogether
hold with appropriate matrices \(A_{ik}\), \(B_{jk}\), \(C_{il}\), and \(D_{jl}\). Substituting these into the deviatoric and spherical parts of (30) yields
The viscoelastic conditions (24) generate the system of equations
Since both the \( \varvec{\gamma }(\mathbf {r}) \)’s and \( \varvec{\delta }(\mathbf {r}) \)’s are linearly independent sets, the equality of the corresponding coefficients follows:
This is the set of temporal ordinary differential equations one has to solve for the \( \varphi _m(t)\)’s and \( \psi _n(t)\)’s. Altogether, we have \(K+L+1\) equations for the \(I+J\) unknowns (the \( +1 \) is (32)). In all the examples considered in Sect. 4, \( K+L+1 = I+J \) so the viscoelastic problem can be solved uniquely.
4 Examples
Five concrete examples follow, with figures that demonstrate the typical behavior revealed. We use
for the function \( \uplambda (t) \) that switches the boundary condition on [cf. (17)]. Three practically interesting different cases are considered:
-
when the switch-on \(\uplambda (t)\) is very slow—i.e., the switch-on time scale \(t_2-t_1\) is small—compared to the viscoelastic time scales,
-
when the switch-on time scale is comparable to the viscoelastic time scales,
-
when the switch-on \(\uplambda (t)\) is very fast compared to the viscoelastic time scales.
In the figures below, the functions
denote the time-dependent factors of the spatial patterns \( \varvec{\gamma }_k(\mathbf {r}) \) and \( \varvec{\delta }_l(\mathbf {r}) \), read off from (39)–(40). As already indicated, while there is arbitrariness in the choice of the \( \eta _k \)’s, the spatial patterns themselves have been fixed uniquely at the level of the elastic solution so the coefficients of the patterns do not contain any arbitrariness.
The displacement field—understood, naturally, with respect to the primary initial state of the continuum—is, via (4),

where the rigid-body like displacement-and-rotation freedom is fixed by prescribing \( \varvec{u}\rightarrow \mathbf {0}\) for asymptotically distant points in the first two examples and, in the further three examples, by the heuristically analogous condition that the highest points of the ground level have no vertical displacement.
For the plots, two concrete viscoelastic models are considered. Since, according to experience, viscoelastic material behavior is more prevalent in the deviatoric part, we take Hooke’s elasticity model for the spherical part. For the deviatoric part, our two choices are the Kelvin model and the Kluitenberg–Verhás model. Remarkably, already the deviatoric Kelvin model leads to a Poynting–Thomson–Zener behavior in uniaxial loadings, exhibiting creep and stress relaxation.
In case of the Kelvin model in the deviatoric part and Hooke model spherically,
the viscoelastic time scale of the model is \(\frac{E^{\mathrm{d}}_1/E^{\mathrm{s}}}{\eta }\). Using this as the unit of time, in the plotted examples, slow switch-on of the boundary condition is represented by \(t_2-t_1=5\), the medium case by \(t_2-t_1=1\), and fast switch-on by \(t_2-t_1=0.1\). The plots are calculated with \(\, \eta = E^{\mathrm{d}}/E^{\mathrm{s}} = E^{\mathrm{d}}_0/E^{\mathrm{s}} = 0.4 \,\) [to which the Poisson’s ratio \( \nu = 0.25 \) corresponds, cf. (19)].
When taking the Kluitenberg–Verhás model in the deviatoric part, for simplicity, we choose zero for the coefficient of \( {\dot{\varvec{\sigma }}}^{\mathrm{d}} \) —in this case the index of inertia (see [15]) is necessarily positive, so (damped) viscoelastic oscillation will be present—:
Again, \(\, \eta = 0.4 \,\) [Poisson’s ratio \(\, \nu = 0.25 \,\)] and the time unit \(\frac{E^{\mathrm{d}}_1/E^{\mathrm{s}}}{\eta }\) are used. Regarding the coefficient of the second time derivative term, \(\frac{E^{\mathrm{d}}_2/E^{\mathrm{s}}}{\eta }=1\) is taken. Notably, models with positive index of inertia may be relevant for materials with remarkable micro- or mesoscopic inertia (similarly to micropolar continua).
Since the bore/tunnel reaches its fully open final state within finite time, the viscoelastic solution is expected to asymptotically tend to the elastic counterpart. For the coefficient functions (44)–(45) (the time-dependent factors of \( \varvec{\gamma }_k(\mathbf {r}) \) and \( \varvec{\delta }_l(\mathbf {r}) \), respectively), this tells, in view of (28) resp. (27),
In each of the examples below, we have performed this consistency check and found agreement. The details are presented for the first example below.
4.1 Cylindrical tunnel opened in infinite, homogeneous, and isotropic stress field
In an infinite, homogeneous, and isotropic stress field \( {\bar{\varvec{\sigma }}}\), we open an infinite cylindrical tunnel with radius \( R \) (see Fig. 1). In cylindrical coordinates, the boundary conditions specifying the elastic solution for the completely open bore are
which are rewritten for the complementary field as
The solution of the elastic problem, for this completely opened bore, is well known (see, e.g., [4, p. 155] or [5, 6]):
Comparison with the general formulae (26) and (34) finds
Then, substituting into (41), (42), and (32), one obtains the following system of differential equations for the viscoelastic problem:
two equations for the two unknowns \(\varphi (t)\), \(\psi (t)\).
For this example, the outcome [i.e., (57)–(58)] can be checked against an already known result. Namely, the same problem has already been solved in [26], there via a different approach. As one can check, the present outcome is in agreement with the result found in [26] (i.e., Eq. (56) of [26]): the obtained differential equations are the same, with the same initial conditions.Footnote 5
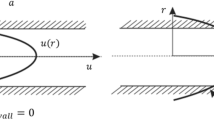
Figure 1 illustrates the solution.

Outline and typical results for a cylindrical bore (tunnel) opened in an infinite, homogeneous, and isotropic stress field in a Kelvin–Hooke (deviatorically Kelvin – spherically Hooke) material. Upper right: Time evolution tendency of the displacement field (displacements are enlarged for visibility), for a fast opening (blue: original boundaries; green, yellow, orange, and red: later snapshots of the boundaries). Second and third rows: Time evolution of the coefficient functions for slow (left column), medium-speed (middle column), and fast (right column) openings (indices: d1 black, there are no other nonzero coefficients). In this simplest problem, nothing surprising is visible. (Color figure online)
The consistency check (49) says for this example
(and there are no nonzero coefficient functions \( \Phi ^{\mathrm{s}}_l \), \( \Psi ^{\mathrm{s}}_l \)). Reassuringly, Fig. 1, which has been prepared with \( \eta = 0.4 \), \( \frac{1}{\eta } = 2.5 \), is consistent with these asymptotic values \( 1 \) and \( 2.5 \), respectively.
As a further illustration, Appendix 1 presents, for this example, a comparison of the analytically determined coefficient functions to numerically calculated ones (and also finds good agreement).
4.2 Cylindrical tunnel opened in an infinite and homogeneous but anisotropic stress field
Next, we generalize the previous example by allowing the initial stress field to be anisotropic.
The stress solution of the elastic problem for the fully opened bore, as can be checked explicitly (or taken, e.g., from [29]), is
with
where we use the following notations related to the primary field \({\bar{\varvec{\sigma }}}\):Footnote 6
Hence, the expansion of \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}(\eta ,\mathbf {r}) \) in (26) holds with
Taking the deviatoric part yields the expansion of \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}^\mathrm{d} (\eta ,\mathbf {r}) \) with
Since \(\varvec{\alpha }_1^{\mathrm{s}}(\mathbf {r}) = \varvec{\alpha }_2^{\mathrm{s}}(\mathbf {r})\), the expansion of \({\hat{\varvec{\sigma }}}_{\mathrm{el}}^\mathrm{s} (\eta ,\mathbf {r}) \) only contains one term:
Putting \( {\hat{\varvec{\zeta }}}_{\mathrm{el}}^\mathrm{d} (\eta ,\mathbf {r}) = \frac{1}{\eta } {\hat{\varvec{\sigma }}}_{\mathrm{el}}^\mathrm{d} (\eta ,\mathbf {r}) \) and \( {\hat{\varvec{\zeta }}}_{\mathrm{el}}^\mathrm{s} (\eta ,\mathbf {r}) = {\hat{\varvec{\sigma }}}_{\mathrm{el}}^\mathrm{s} (\eta ,\mathbf {r}) \) together provides the expansion of \({\hat{\varvec{\zeta }}}_{\mathrm{el}}(\eta ,\mathbf {r})\):
The matrices in the linear relationships (34) can be identified as
All these together specify the two deviatoric viscoelastic equations
and the spherical equation
These are supplemented by the requirement from the boundary condition,
See Figs. 2 and 3 for typical solutions.

Outline and typical results for a cylindrical bore (tunnel) opened in an infinite and homogeneous but anisotropic stress field in a Kelvin–Hooke material. Upper right: (Enlarged) time evolution tendency of the displacement field, for a fast opening (blue: original boundaries; green, yellow, orange, and red: later snapshots of the boundaries). Such distortions are not uncommon for tunnels, see [10,11,12,13]. Second and third rows: Time evolution of the coefficient functions for slow (left column), medium-speed (middle column), and fast (right column) openings (indices: d1 black, d2 green, s1 red). In addition to the anisotropic distortion of the contours, note the nontrivial time dependencies depicted by the greenish lines in the middle and right columns: they start with opposite sign with respect to the later and asymptotically taken sign. This leads to temporary counter-intuitive motion components. (Color figure online)

4.3 Cylindrical tunnel opened in a homogeneous medium under the action of gravity
The remaining three examples discuss the viscoelastic process of a semi-infinite gravitating domain (also called “dead load”) weakened by a bore/tunnel, for three lateral pressure coefficients. The elastic solution of the problem can be found in [1,2,3].Footnote 7 The primary stress field, in an appropriate Cartesian coordinate system (see the outline in Fig. 4), can be written as
where \(\gamma =\varrho g\) describes the homogeneous force density, \(d\) is the depth of the center of the bore from the surface, and parameter \(k\) is the lateral pressure coefficient. [1] gives the solution of the problem for three different values of \(k\):
-
When one considers a hydrostatic pressure distribution for the primary field then \(k=1\).
-
When the dilatation of the medium is laterally inhibited then the strain components \({\bar{\varepsilon }}_{xx}\) and \({\bar{\varepsilon }}_{zz}\) are zeros so one can derive \(k=\frac{\nu }{1-\nu }=\frac{1-\eta }{1+2\eta }\).
-
When the dilatation of the medium is laterally free then the stress components \({\bar{\sigma }}_{xx}\) and \({\bar{\sigma }}_{zz}\) are zeros so \(k=0\).
Transforming (73) to a cylindrical coordinate system yields the stress components
The boundary conditions are prescribed for the contour of the cylinder and for the plane surface—the horizontal boundary—after the drilling; on these boundaries, the normal component of stress is zero.
Mindlin gives the solution in form of an infinite series in the bipolar coordinate system that suits to both the cylinder and the plane [1]. If the ratio of the depth \(d\) of the center of the bore and the radius \(R\) of the cylinder satisfies \(d/R>1.5\)—large-depth approximation— then it suffices to take the leading order term from the infinite series.
This first term is transformed to cylindrical coordinate system in [2, 3]:
The entries of the complementary field (having a plane strain situation) are
The three above-mentioned special cases \( k = 1 \), \( k=\frac{\nu }{1-\nu }=\frac{1-\eta }{1+2\eta } \), \( k=0 \) are discussed in the following three subsections.
4.3.1 Gravitating solid, hydrostatic initial stress state (\(k=1\))
In this case, the complementary field can be written as
with
so there are two expansion coefficients,
The deviatoric part of \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}(\eta ,\mathbf {r}) \) delivers the expansion of \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}^\mathrm{d} (\eta ,\mathbf {r}) \),
with
In parallel, the spherical parts merge again,
with
Correspondingly, \( {\hat{\varvec{\zeta }}}_{\mathrm{el}}(\eta ,\mathbf {r}) \) is
telling
Reading off the matrices yields
The resulting deviatoric viscoelastic equations are
while the spherical equation is
Finally, the boundary condition imposes
Typical outcomes are visible in Fig. 4.

Outline and typical results for a cylindrical bore (tunnel) opened in a homogeneous Kelvin–Hooke medium under gravity, with hydrostatic initial stress state (\(k=1\)). Upper right: (Enlarged) time evolution tendency of the displacement field, for a fast opening (blue: original boundaries; green, yellow, orange, and red: later snapshots of the boundaries). Second and third rows: Time evolution of the coefficient functions for slow (left column), medium-speed (middle column), and fast (right column) openings (indices: d1 black, d2 green, s1 red). The observable nontrivial time dependencies resemble the ones seen for the anisotropic problem (see Fig. 2). Plausibly, gravity qualitatively acts as a kind of anisotropy. (Color figure online)
4.3.2 Gravitating solid, no lateral deformations \(\left( k=\frac{\nu }{1-\nu }=\frac{1-\eta }{1+2\eta }\right) \)
In this case, the complementary stress field reads
with
The deviatoric part leads to
In parallel, one finds that \(\, \varvec{\alpha }^{\mathrm{s}}_2 = \varvec{\alpha }^{\mathrm{s}}_1 + 3\varvec{\alpha }^{\mathrm{s}}_3 \,\) so there is again one spherical spatial pattern less than deviatoric:
The expansion of \({\hat{\varvec{\zeta }}}_{\mathrm{el}}(\eta ,\mathbf {r})\) proves to be
The corresponding matrices are
The resulting viscoelastic equations read
while from the boundary condition, we have
Figures 5 and 6 illustrate the solutions.

Outline and typical results for a cylindrical bore (tunnel) opened in a homogeneous Kelvin–Hooke medium under gravity, with no lateral deformations allowed in the primary field (\(k=\frac{\nu }{1-\nu }=\frac{1-\eta }{1+2\eta }\)). Upper right: (Enlarged) time evolution tendency of the displacement field, for a fast opening (blue: original boundaries; green, yellow, orange, and red: later snapshots of the boundaries). Second and third rows: Time evolution of the coefficient functions for slow (left column), medium-speed (middle column), and fast (right column) openings (indices: d1 black, d2 green, d3 orange, s1 red, s2 blue). The more elaborate initial condition yields a richer structure of spatial patterns, some of which start with opposite sign compared to the asymptotic equilibrial one. (Color figure online)

4.3.3 Gravitating solid, free lateral deformations (\(k=0\))
In this case, the complementary stress field consists of three independent spatial patterns again:
with
Taking the deviatoric part yields the expansion of \( {\hat{\varvec{\sigma }}}_{\mathrm{el}}^\mathrm{d} (\eta ,\mathbf {r}) \) with
In parallel, the spherical part gives one less spatial pattern again, as follows from \(\, \varvec{\alpha }^{\mathrm{s}}_3(\mathbf {r}) = 2 \left[ \varvec{\alpha }^{\mathrm{s}}_1(\mathbf {r}) - \varvec{\alpha }^{\mathrm{s}}_2(\mathbf {r}) \right] \,\):
The resulting expansion of \( {\hat{\varvec{\zeta }}}_{\mathrm{el}}(\eta ,\mathbf {r}) \) has
The matrices prove to be
With these, the deviatoric viscoelastic equations are
and the spherical ones are
The boundary condition requires to fulfill
Solutions are displayed in Fig. 7.

Outline and typical results for a cylindrical bore (tunnel) opened in a homogeneous Kelvin–Hooke medium under gravity, with free lateral deformations in the primary field (\(k=0\)). Upper right: (Enlarged) time evolution tendency of the displacement field, for a fast opening (blue: original boundaries; green, yellow, orange, and red: later snapshots of the boundaries). Second and third rows: Time evolution of the coefficient functions for slow (left column), medium-speed (middle column), and fast (right column) openings (indices: d1 black, d2 green, d3 orange, s1 red, s2 blue). A remarkable difference from the previous two examples is that, here, the contour of the tunnel expands in the horizontal direction. (Color figure online)
5 Conclusions
Viscoelastic properties of solids can lead, around a freshly opened bore/tunnel, not only to delayed and damped response but—even in the simplest ‘deviatoric Kelvin–spherical Hooke’ case—to direction dependent and temporarily counter-intuitive motion, as the above figures illustrate. Analytical solutions provide means to easily explore such and other related features, qualitatively and, depending on situation, quantitatively as well. When some of the viscoelastic coefficients are unknown or only vaguely known, the explicit formulae allow for fast evaluation for many trial coefficient values.
When a numerical—primarily, finite-element—solution is also available, it can be validated using the analytical solution. This is actually one of our plans for the future: to realize the problems presented here numerically as well, and after satisfactory agreement, the numerical version is safe to generalize to settings where the geometry or some other aspect make the analytical approach unfeasible. Here, as a first step, we have provided numerical—finite-difference—comparison to the analytical result obtained for one of the example problems (cf. Sect. 4.1 and Appendix 1). For problems with less geometric symmetry, a finite-element approach appears more feasible. This, however, is not straightforward as finite-element softwares prefer to consider viscoelastic problems with boundary conditions on displacement (see, e.g., the manual [30] of the software Abaqus, which realizes approaches taken from [31, 32], among others) while our analytical results are for boundary conditions on stress. Another nontrivial issue regarding comparison of analytical and numerical results is numerical error: simulating complex geometries for many time steps at small numerical error (to make the comparison to the analytical prediction meaningful) in a stress-oriented—rather than displacement-oriented— finite-element realization requires very many discrete degrees of freedom, rendering the simulation severely resource-intensive. Some suitable efficient approach is necessary, and this is the direction we plan to pursue in future.
In parallel, further investigation would be beneficial for the analytical solution method (presented here) itself, exploring the possibilities of generalization, for example, in the direction of infinitely many expansion terms (see e.g., [1, 9]) with a hierarchy so any finite truncation of the expansion would lead to informative approximation of the full result. Here, we have initiated this truncation methodology by creating the solution of the gravity-related problems at the level of the first term of such an expansion. Such a hierarchic approach is not obvious to realize in the general integral equation formalism.
At last, it is worth repeating that the approach and solutions presented here (and the solutions for thick-walled tubes and spherical tanks and hollows in [25] and in the preprint [33]) find applications in other fields of engineering and technology as well, for describing plastics, asphalt, biomaterials, composites,and structured materials. etc..
Notes
This step can be readily done by hand, in each of the examples treated here.
Accordingly, wave phenomena are omitted from our scope. Nevertheless, nontrivial time-dependent processes will emerge, as an interplay between the time-dependent boundary conditions and the viscoelastic material model.
Note that, in such cases, the complementary fields and their time derivatives are zero initially.
For the subsequent further examples, the authors are not aware of a known solution with which the result obtained here could be compared.
The anisotropy of the primary stress field is embodied by the fact that all the components \( {\bar{\sigma }}_{xx} \), \( {\bar{\sigma }}_{yy} \), \( {\bar{\sigma }}_{zz} \), \( {\bar{\sigma }}_{xy} \), \( {\bar{\sigma }}_{xz} \), \( {\bar{\sigma }}_{yz} \) may be arbitrary.
As an unplanned consistency check of our approach, we have found that, in Eq. (2.188) of page 133 of [2], the radial and azimuthal stress components are mistakenly interchanged.
References
Mindlin RD (1939) Stress distribution around a tunnel. Proc Am Soc Civ Eng 65(4):619–642
Papkovich PF (1939) Elasticity theory. Oborongiz Press, Moscow
Savin GN (1970) Stress distribution around holes. National Aeronautics and Space Administration, Washington, DC
Davis RO, Selvadurai APS (1996) Elasticity and geomechanics. Cambridge University Press, Cambridge
Hefny AM, Lo KY (1999) Analytical solutions for stresses and displacements around tunnels driven in cross-anisotropic rocks. Int J Numer Anal Methods Geomech 23:161–177
Exadaktylos GE, Stavropoulou MC (2002) A closed-form elastic solution for stresses and displacements around tunnels. Int J Rock Mech Min Sci 39(7):905–916
Kolymbas D, Wagner P, Blioumi A (2012) Cavity expansion in cross-anisotropic rock. Int J Numer Anal Methods Geomech 36:128–139
Lu A, Zeng X, Xu Z (2016) Solution for a circular cavity in an elastic half plane under gravity and arbitrary lateral stress. Int J Rock Mech Min Sci 89:34–42
Cai H, Az Lu, Yc Ma (2019) Analytic stress solution for a circular tunnel in half plane with a concentrated force. Math Mech Solids 24(12):3862–3879
Mathieu E (2008) At the mercy of the mountain. Tunnels Tunnel Int 2008(October):21–24
Barla G, Bonini M, Debernardi D (2008) Time dependent deformations in squeezing tunnels. In: The 12th International conference of international association for computer methods and advances in geomechanics (IACMAG). Curran Associates, Red Hook, pp 4265–4275
Barla G, Bonini M, Debernardi D (2010) Time dependent deformations in squeezing tunnels. Int J Geoeng Case Hist 2(1):40–65 (Open access)
Barla G, Debernardi D, Sterpi D (2012) Time-dependent modeling of tunnels in squeezing conditions. Int J Geomech 12(6):697–710
Shrestha PK, Panthi KK, Basnet CB (2014) Analysis of squeezing phenomenon in the headrace tunnel of Chameliya Project, Nepal. Hydro Nepal J Water Energy Environ 13(July):44–51 (Open access.)
Asszonyi C, Fülöp T, Ván P (2015) Distinguished rheological models for solids in the framework of a thermodynamical internal variable theory. Contin Mech Thermodyn 27(6):971–986
Matsuki K, Takeuchi K (1993) Three-dimensional in situ stress determination by an elastic strain recovery of a rock core. Int J Rock Mech Min Sci Geomech Abstr 30(7):1019–1022
Matsuki K (2008) Anelastic strain recovery compliance of rocks and its application to in situ stress measurement. Int J Rock Mech Min Sci 45(6):952–956
Lin W, Kuwahara Y, Satoh T et al (2010) A case study of 3D stress orientation determination in Shikoku Island and Kii Peninsula, Japan. In: Vrkljan I (ed) Rock engineering in difficult ground conditions—soft rock and karst. CRC Press/Balkema Book/Taylor & Francis Group, Boca Raton/London/New York, pp 277–282
Baali M, Amrane MN (2021) Effect of insertion viscoelastic damping layer with different thicknesses on the dynamic response of multi-layered beam in forced vibration. Period Polytech Mech Eng 65(1):1–9
Gurtin ME, Sternberg E (1962) On the linear theory of viscoelasticity. Arch Ration Mech Anal 11:291–356
Gromov VG (1971) On the mathematical content of Volterra’s principle in the boundary value problem of viscoelasticity. PMM 35(5):869–878 (In Russian. English version: J Appl Math Mech 35(5):821–831, 1971)
Rabotnov YN (1980) Elements of hereditary solid mechanics. Mir Publishers, Moscow
Christensen RM (1982) Theory of viscoelasticity. An introduction, 2nd edn. Academic Press, New York
Volterra V (1913) Leçons sur les Fonctions de Lignes. Gauthier-Villars, Paris
Fülöp T, Szücs M (2020) A solution method for determining rheological time dependence around tunnels. In: ISRM international symposium—EUROCK 2020. International Society for Rock Mechanics and Rock Engineering, Lisbon, Portugal, pp ISRM–EUROCK–2020–017. https://onepetro.org/ISRMEUROCK/proceedings-abstract/EUROCK20/All-EUROCK20/ISRM-EUROCK-2020-017/447293
Fülöp T, Béda G (2010) Rheological dynamics of tunnels – an analytical investigation. In: Vrkljan I (ed) Rock engineering in difficult ground conditions—soft rock and karst. CRC Press/Balkema Book/Taylor & Francis Group, Boca Raton/London/New York, pp 441–447
Béda G, Kozák I, Verhás J (1996) Continuum mechanics. Akadémiai Kiadó, Budapest
Asszonyi C, Csatár A, Fülöp T (2016) Elastic, thermal expansion, plastic and rheological processes—theory and experiment. Perio Polytech Civ Eng 60(4):591–601
Asszonyi C, Richter R (1979) The continuum theory of rock mechanics. Series on rock and soil mechanics, vol 4. Trans Tech Publications, Rockport
ABAQUS (2014) Version 6.14 User’s Manual. Dassault Systèmes Simulia Corporation, Providence
Simo JC (1987) On a fully three-dimensional finite-strain viscoelastic damage model: formulation and computational aspects. Comput Methods Appl Mech Eng 60:153–173
Hughes T, Simo JC (2000) Computational Inelasticity. Springer, New York
Fülöp T, Szücs M (2018) Analytical solution method for rheological problems of solids. E-print. arXiv:1810.06350
Bergström J (2015) Mechanics of solid polymers: theory and computational modeling. William Andrew - Elsevier, Amsterdam
Acknowledgements
The authors thank Csaba Asszonyi and Zoltán Szarka for inspiring conversations and ideas, Gyula Béda for valuable discussions, and László Szabó for useful suggestions. The research reported in this paper and carried out at BME has been supported by the NRDI Fund (TKP2020 NC, Grant No. BME-NCS) based on the charter of bolster issued by the NRDI Office under the auspices of the Ministry for Innovation and Technology, the National Research, Development and Innovation Office—NKFIH KH 130378 and FK 134277, and the R &D project NO. 2018-1.1.2-KFI-2018-00207.
Funding
Open access funding provided by Budapest University of Technology and Economics.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: The differential operator formulated equivalent of a viscoelastic Prony series model
Here, we show that linear viscoelastic models given in the widely used Prony series form (see, e.g., [34]; it is also a built-in material modeling option in commercial softwares like Ansys and Abaqus) are covered by the material model (6)–(8). With notations in conform with the rest of the paper, the Prony series based material relationship is
with positive constants \( {\check{E}}^{\mathrm{d}}_{(i)} \), \( \tau ^{\mathrm{d}}_{(i)} \), \( {\check{E}}^{\mathrm{s}}_{(i)} \), \( \tau ^{\mathrm{s}}_{(i)} \) [\( \tau ^{\mathrm{d}}_{(i)}\)’s being \( n^{\mathrm{d}}\) different time scales and \( \tau ^{\mathrm{s}}_{(i)} \)’s also being \( n^{\mathrm{s}}\) different time scales] and with \( \varvec{\sigma }(0) = \mathbf {0}\), \( \varvec{\varepsilon }(0) = \mathbf {0}\) assumed; position dependence is suppressed as it does not play any role in what follows. For definiteness, steps are shown for the spherical part—the deviatoric part can be treated analogously. The following calculation does not rely on the Laplace transform—a customary tool in the field—but introduces differential operators directly.
Corresponding to the \( n^{\mathrm{s}}+ 1 \) terms of \( {\check{E}}^{\mathrm{s}}(t) \), we can define and find




In short, we have
where \( {\mathcal {S}}^{\mathrm{s}}_{(i)} \), \( {\mathcal {S}}^{\mathrm{s}}_{(j)} \) \( ( i \ne j )\) are relative prime operator polynomials as \( \tau ^{\mathrm{s}}_{(i)} \ne \tau ^{\mathrm{s}}_{(j)} \).
Taking the sum of
yields
[the form seen in (6)] with the degree-\( n^{\mathrm{s}}\) operator polynomials
Hence, we have reached our aim. In passing, we can see a limitation of the Prony series formulation: it cannot represent cases where \( {\mathcal {S}}^{\mathrm{s}}\) and \( {\mathcal {E}}^{\mathrm{s}}\) (or, analogously, \( {\mathcal {S}}^{\mathrm{d}}\) and \( {\mathcal {E}}^{\mathrm{d}}\)) are different-degree operator polynomials.
Appendix B: Numerical illustration of the example discussed in Sect. 4.1
Here, for comparison, a numerical solution is presented to the problem of a cylindrical tunnel opened in infinite, homogeneous and isotropic stress field, considered in Sect. 4.1.

Finite-difference numerical results compared to the analytical results, for the cylindrical tunnel opened in infinite, homogeneous, and isotropic stress field. Up to numerical error, a good agreement can be observed
The infinite domain around the bore is truncated to \( R \le r \le 30 R \), this region is divided into 1000 equidistant layers radially, and the boundary condition of zero large-distance normal complementary stress is imposed at \( r = 30 R \). Time is discretized via a time step of \( 0.005 \) times the time unit \(\frac{E^{\mathrm{d}}_1/E^{\mathrm{s}}}{\eta }\).
A finite-difference scheme is applied, according to the following algorithm. At a given time instant, we impose the actual value of the time-dependent boundary condition on \( {\hat{\sigma }}_{rr} \) at \( r = R \). In parallel, a trial value of \( {\hat{\sigma }}_{\varphi \varphi } \) at \( r = R \) is taken. From these two values, the deviatoric and spherical components \( {\hat{\sigma }}^{\mathrm{d}}_{rr} \) and \( {\hat{\sigma }}^{\mathrm{s}}_{rr} \) are calculated there. (47) is used to determine the next-in-time \( {\hat{\zeta }}^{\mathrm{d}}_{rr} \) and \( {\hat{\zeta }}^{\mathrm{s}}_{rr} \), and these provide \( {\hat{\zeta }}_{rr} \) and \( {\hat{\zeta }}_{\varphi \varphi } \).
Having all these at the innermost layer at \( r = R \), we step one layer outward: finite-difference discretized versions of (14) and of (22) determine \( {\hat{\sigma }}^{\mathrm{d}}_{rr} \) and \( {\hat{\zeta }}_{\varphi \varphi } \), respectively, at the neighboring layer. (47) determines the next-in-time \( {\hat{\zeta }}^{\mathrm{d}}_{rr} \), which enables to obtain \( {\hat{\zeta }}_{\varphi \varphi } \) and \( {\hat{\zeta }}^{\mathrm{s}}_{rr} \). (47) delivers \( {\hat{\sigma }}^{\mathrm{s}}_{rr} \), and then we can determine \( {\hat{\sigma }}_{\varphi \varphi } \) and thus \( {\hat{\sigma }}^{\mathrm{d}}_{rr} \).
This way we iterate layer-by-layer outward, until we reach the outermost layer at \( r = 30 R \). The obtained value of \( {\hat{\sigma }}_{rr} \) at \( r = 30 R \) is, in general, nonzero (since the value of \( {\hat{\sigma }}_{\varphi \varphi } \) at \( r = R \) was just a guess). That’s why we try another guess for \( {\hat{\sigma }}_{\varphi \varphi } \) at \( r = R \) as well, and from the two outputs of \( {\hat{\sigma }}_{rr} \) at \( r = 30 R \), we can identify the value of \( {\hat{\sigma }}_{\varphi \varphi } \) at \( r = R \) that leads to zero \( {\hat{\sigma }}_{rr} \) output at \( r = 30 R \).
Finally, taking into account the space dependence (52)–(53), the coefficients \( \Phi \), \( \Psi \) can be extracted, at any chosen \( r \). If the extracted values prove \( r \) independent (up to numerical uncertainty), and match with the analytically predicted values, then the agreement between numerical and analytical calculation is found (up to that numerical uncertainty). As Fig. 8 shows, the numerical results are indeed satisfactorily close to the analytical ones. The deviation has been found to decrease with finer time and space step and with larger spatial domain considered, as expected.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Fülöp, T., Szücs, M. Analytical solutions for rheological processes around bores and tunnels. J Eng Math 136, 1 (2022). https://doi.org/10.1007/s10665-022-10235-6
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10665-022-10235-6