
Abstract
A vanishing at infinity solution of the three-dimensional Laplace equation is sought in an a priori unknown domain with overdetermined boundary conditions, the right-hand sides of which depend on the unit normal to the free boundary. A perturbation analysis of the nonstandard free boundary problem that models deep abrasive drilling has been performed under the assumption that the free boundary is close to the surface of a given semi-infinite cylinder, the longitudinal position of which depends on the boundary data, and the leading-order asymptotic solution has been developed.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Free and moving boundary problems [1, 2], where the problem domain is a priori unknown are encountered in different areas of science and engineering [3], including laser drilling of metals [4, 5], crack propagation and delamination in composite materials [6, 7], in Hele–Shaw flow [8, 9], and elastic and plastic torsion [10, 11].
An example of stationary free boundary problem for a harmonic function u can be formulated as an overdetermined problem with two boundary conditions:
on a free boundary \(\varGamma \).
A number of approaches for numerical solution of stationary free boundary value problems have been developed, in particular, using trial methods [12, 13], shape optimization [14], cost functional minimization [15], Newton’s method [16], and level set techniques [17].
We note that the so-called Serrin-type overdetermined boundary value problems for Poisson’s equation with the boundary conditions (1) with constant right-hand sides have been studied for both interior [18, 19] and exterior [20, 21] domains. It has been established that if \(g=\mathrm const\) and \(h=\mathrm const\), then \(\varGamma \) is a sphere and u is radially symmetric about the center of the sphere.
The case of a Bernoulli problem with non-constant gradient boundary constraint, that is (instead of the second boundary condition (1))
was studied in [22] under the assumption that its right-hand side depends on the unit normal to the unknown boundary.
In the present paper, we consider one nonstandard free boundary problem, where the right-hand sides of Eqs. (1) depend both on the unit normal vector to the surface \(\varGamma \) and its position. The problem was motivated by recent mathematical modeling studies [23, 24] of deep drilling mechanics. Since the deep drilling problem considered in [23] is strongly nonlinear, we formulate its scalar prototype to highlight the novelty of the free boundary formulation. The term “abrasive” refers to the Neumann boundary condition (1)\(_2\), whereas the direct analogy with the deep drilling problem [23, 24], which has been formulated in the framework of linear elasticity, implies the use of the Bernoulli boundary condition (2). We note that the Neumann boundary condition (1)\(_2\) with a constant right-hand side models a nearly constant contact pressure distribution achieved in stationary abrasive wear according to Archard’s law (see, e.g., [25, 26]). Note also that confusion should be avoided with the term “free boundary” that is usually used to refer to traction-free boundary in solid mechanics.
An important feature of the deep drilling problem is that the free boundary \(\varGamma \) is assumed to be infinite and, in a sense, close to the surface of a semi-infinite cylinder, representing the drilling bit. To the best of the authors’ knowledge, no published work, outside the works of Mikhailov and Namestnikova [23, 24, 27], has attempted to study an overdetermined boundary value problem with the Dirichlet boundary data defined as the sign distance to a given surface.
Another novelty of the deep abrasive problem is that the Dirichlet boundary condition, which is imposed on a proper subset of \(\varGamma \), additionally contains a scalar parameter, \(\delta \), value of which depends on the Neumann boundary data via the unknown function u.
The rest of the paper is organized as follows. In Sect. 2, we formulate the scalar problem of deep abrasive drilling. Its perturbation analysis has been given in Sect. 3 under the assumption that the free boundary is close to the bit surface in some displaced position, corresponding to the level of imposed external loading. In Sect. 4, we linearize the free boundary problem and present the leading order asymptotic solution. A simple example, where some analytical results can be derived based on the known solutions, is considered in Sect. 5. Finally, in Sect. 6, we outline the discussion of the presented analysis.
2 Free boundary problem formulation
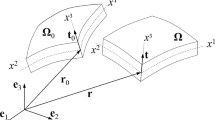
We consider stationary abrasive drilling of a semi-infinite bore-hole \({\mathbb {R}}^3\setminus {{\bar{\varOmega }}}\), spreading to \(x_3=+\infty \) in an infinite space \({\mathbb {R}}^3\) (see Fig. 1). Let the \(x_3\)-axis of the Cartesian coordinate system \(\mathbf{x}=(x_1,x_2,x_3)\) coincide with the bore-hole axis. For simplicity, we may assume that the bit is axially symmetric and, therefore, the domain outside the bore-hole \(\varOmega \) is axially symmetric as well. Let B denote the domain occupied by the bit in the unloaded state. We assume that the bit’s boundary \(\partial B\) is semi-infinite and is composed of two parts: a vertical cylindrical surface \(\partial B_\Vert \) and a curvilinear bottom surface \(\partial B_\cup \).

Undeformed configuration. Bore-hole boundary partition

Deformed configuration. Bit boundary partition
In the loaded state, the bit is moved into contact with the bore-hole surface. Let \(\delta >0\) be the bit’s vertical displacement in the opposite direction of the \(x_3\)-axis, so that \(B^\delta \) and \(\partial B^\delta =\partial B^\delta _\Vert \cup \partial B^\delta _\cup \) will denote the domain occupied by the displaced bit and its boundary (see Fig. 2). Further, in the loaded state, the bit’s bottom surface \(\partial B^\delta _\cup \) represents the rupture front \(\partial \varOmega ^\delta _\cup \), which is characterized by the boundary condition
Here, \(\mathbf{n}(\mathbf{x})\) is a unit outward (i.e., directed inward the bore-hole) normal vector, \(\mu \) and p are positive constants. Note that at the center of coordinates (denoted as point O), we have \(\mathbf{n}(O)=1\).
For the sake of simplicity, we assume that in the loaded state, the vertical bore-hole surface \(\partial \varOmega _\Vert =\partial \varOmega {\setminus }\partial \varOmega _\cup \) comes into full contact with the bit’s vertical surface \(\partial B^\delta _\Vert \), i.e., \(\partial \varOmega ^\delta _\Vert =\partial B^\delta _\Vert \), and the contact is stress- and damage-free, so that
In the loaded state, the bore-hole surface \(\partial \varOmega ^\delta \) coincides with the bit surface \(\partial B^\delta \), whereas in the unloaded state, there is a gap between the surfaces \(\partial \varOmega \) and \(\partial B\). Hence, let \(g(\mathbf{x})\) denote the gap measured along the normal to the boundary \(\partial \varOmega \) in the inward direction with respect to the bore-hole. It is clear that the gap between the lateral surfaces \(\partial \varOmega _\Vert \) and \(\partial B_\Vert \) is invariant with regard to any downward vertical translation of the cylindrical bit surface \(\partial B_\Vert \), while the gap between the bottom surfaces \(\partial \varOmega _\cup \) and \(\partial B^\delta _\cup \) will be, respectively, affected. So, let the gap between the surfaces \(\partial \varOmega _\cup \) and \(\partial B^\delta _\cup \) be denoted by \(g^\delta (\mathbf{x})\).
The unknown function \(u(\mathbf{x})\) is required to satisfy the Laplace equation inside the domain \(\varOmega \), i.e.,
and to vanish at infinity,
however, the problem domain itself is supposed to be unknown.
To complete the problem statement, we impose the second boundary condition on each of the boundary parts \(\partial \varOmega _\cup \) and \(\partial \varOmega _\Vert \) as follows:
Observe that by analogy with contact problems, one may additionally impose the so-called equilibrium condition
with a constant P that, in view of Eq. (3), should be related to p. Indeed, the substitution of (3) into Eq. (9) leads to the relation
where \(\vert \omega _\cup \vert \) is the area of the projection \(\omega _\cup \) of the surface \(\partial \varOmega _\cup \) on the plane \(x_3=0\).
Further, we note that there is some ambiguity in the definition of the bit surface \(\partial B\) in the unloaded state. Here we will follow the convention usually used in contact problems that the surfaces \(\partial B_\cup \) and \(\partial \varOmega _\cup \) coincide at a single point O lying on the vertical \(x_3\)-axis. So, using the arbitrariness in the vertical position of the center of coordinates, we will assume that
as the point O has been chosen as the coordinate center.
Equation (11) immediately implies that
where \(\delta \) is the bit displacement. To simplify the calculations of the displaced gap function \(g^\delta \) under the assumption of relatively small displacement \(\delta \), the following approximation can be utilized:
Finally, the partition of the bore-hole boundary \(\partial \varOmega \) into two parts \(\partial \varOmega _\cup \) and \(\partial \varOmega _\Vert \) will be determined by the conditions
so that the contribution to the total contact force P [see Eq. (9)] from the surface loading p, as it is specified by Eq. (3), will be positive on the entire rupture front \(\partial \varOmega _\cup \).
Equations (3)–(14) constitute a free boundary problem, where positions of the surfaces \(\partial \varOmega _\cup \) and \(\partial \varOmega _\Vert \) must be determined in the process of solution.
Remark 1
Let \({{\mathcal {H}}}(x)\) be the Heaviside function, that is \(\mathcal{H}(x)=1\) if \(x>0\), and \({{\mathcal {H}}}(x)=0\) if \(x\le 0\). Then, in view of (13) and (14), the boundary conditions (3), (4) and (7), (8) can be represented in the form (1) as follows:
Here, \(\varGamma =\partial \varOmega \) is the entire boundary of the hole.
3 Perturbation analysis of the free boundary problem
We assume that the unknown bore-hole surface \(\partial \varOmega \) is close to the bit surface \(\partial B_\cup \), so that the gap \(g(\mathbf{x})\) is relatively small compared to the radius of the cylindrical surface \(\partial B_\Vert \).
Now, by applying a perturbation technique [28], we will move the boundary conditions from the surface \(\partial \varOmega \) to the surface \(\partial B\). With this aim, we introduce a local orthogonal curvilinear coordinate system on \(\partial B\), denoted as \(\varvec{\alpha }=(\alpha _1,\alpha _2)\) with the Lamé coefficients \(A_1(\varvec{\alpha })\) and \(A_2(\varvec{\alpha })\), and a unit outward (with respect to the bit domain B) vector \(\varvec{\nu }(\varvec{\alpha })\) (it is assumed that \(\varvec{\nu }=\mathbf{e}_1\times \mathbf{e}_2\)). Let also \(\gamma (\varvec{\alpha })\) denote the gap between the surfaces \(\partial B\) and \(\partial \varOmega \) measured from the surface \(\partial B\) to the surface \(\partial \varOmega \) in the direction of the vector \(\varvec{\nu }(\varvec{\alpha })\). Then, in the local coordinate system \((\alpha _1,\alpha _2,\nu )\), the unknown surface \(\partial \varOmega \) can be parameterized as follows:
By accounting only for the first-order perturbation effects, we can replace the boundary condition (8) with the following:
Thus, by approximating the left-hand side of Eq. (18) as
we linearize Eq. (18) as follows:
Now, we can parameterize the surface \(\partial \varOmega _\Vert \) by using the radius-vector \(\mathbf{r}(\varvec{\alpha })\) of the surface \(\partial B_\Vert \) as follows:
Differentiating the radius-vector \(\mathbf{R}(\varvec{\alpha })\) with respect to the curvilinear coordinates and making use of the Rodrigues theorem, we obtain
where \(R_1\) and \(R_2\) are the two principal curvature radii, \(\mathbf{e}_1\) and \(\mathbf{e}_2\) denote the unit coordinate vectors of the coordinate system \((\alpha _1,\alpha _2)\).
Then, the gradient of a scalar field \(\phi \) in the orthogonal coordinate system \((\alpha _1,\alpha _2,\nu )\) is defined by the formula
Correspondingly, the Laplacian of a scalar field \(\phi \) is defined as follows:
Here, \(h_1\), \(h_2\), and \(h_3=1\) are the Lamé coefficients of the coordinate system \((\alpha _1,\alpha _2,\nu )\), i.e.,
Observe also that formula (21) in the vicinity of the base surface \(\partial B\) can be approximated as
where \(\nabla _\alpha \) is the gradient operator in the curvilinear coordinate system on \(\partial B\).
Since the two vectors (20) (\(i=1,2\)) are tangent vectors to the surface \(\partial \varOmega _\Vert \), we can define the limit normal vector to the surface \(\partial \varOmega _\Vert \) as follows:
Recall that the normal vector \(\mathbf{n}\) has been defined previously to be directed inward the bore-hole, i.e., in the opposite direction with respect to the normal vector \(\varvec{\nu }\).
Substituting (20) (\(i=1,2\)) into the second equation (24) and making use of the assumptions \(\vert \gamma \vert \ll \min \{R_1,R_2\}\) and \(\vert \partial \gamma /\partial \alpha _i\vert \ll 1\) (\(i=1,2\)), we derive the second-order approximation
Now, we are in a position to move the boundary condition (4) from the surface \(\partial \varOmega _\Vert \) to the surface \(\partial B_\Vert \). First, by definition, we have
where the gradient operator \(\nabla _x\) is defined by (21).
Second, by utilized formulas (23), we readily obtain
and the subsequent application of the Maclaurin approximation yields
Third, substituting the first-order approximations (25) and (27) into Eq. (26), we find
Thus, the boundary condition (4) can be linearized as follows:
In the same way, we replace the boundary condition (3), which is imposed on the surface \(\partial \varOmega _\cup \), with the following one on the bit bottom surface:
It is to emphasize here that p and \(\mu \) are constants.
Finally, let \(\gamma ^\delta (\varvec{\alpha })\) denote the gap between the surfaces \(\partial B_\cup ^\delta \) and \(\partial \varOmega _\cup \) measured from the surface \(\partial B_\cup ^\delta \) in the direction of the vector \(\varvec{\nu }(\varvec{\alpha })\). Then, in the framework of the first-order approximation, we replace the boundary condition (7) on the free boundary \(\partial \varOmega _\cup \) with the following, which is imposed on the bit bottom surface in the unloaded state:
Now, the application of the perturbation method to Eq. (31) yields the linearized boundary condition
Thus, on each part of the known boundary \(\partial B\), we again have two boundary conditions, one of which should be used for determination of the gap function.
4 Solution of the linearized free boundary problem
First of all, we emphasize that Eqs. (19), (29), (30), and (32) have been derived by neglecting second-order terms. Therefore, by making use of Eqs. (29) and (30), and staying within the limits of their accuracy, we can simplify Eqs. (19) and (32), respectively, as follows:
The second leading-order solution of the linearized free boundary problem, which is composed by the Laplace equation
and the boundary conditions (29), (30), (33), and (34), can be constructed by satisfying the limit forms of Eqs. (29) and (30), that are
The boundary value problem (35), (36) has a unique solution satisfying the following asymptotic condition:
At the same time, the leading-order approximations for the gap functions on the surfaces \(\partial B_\Vert \) and \(\partial B_\cup \), in light of Eqs. (33) and (34) are given by
where the right-hand sides are known from the solution \(u_0(\mathbf{x})\) of the Neumann problem (35)–(37).
Some comment is necessary on the use of Eq. (39) instead of Eq. (34). Observe that Eqs. (35) and (36) are linear, and, therefore, the function \(u_0(\mathbf{x})\) will be proportional to the dimensionless ratio \(p/\mu \). On the other hand, Eq. (38) has been derived under the assumption that \(\gamma _0\) is relatively small (which turns out to be of the same order as \(u_0\)). Therefore, when considering the leading-order approximation, the second term on the left-hand side of Eq. (34) can be neglected.
As can be seen from Eq. (39), there arises a difficulty in determining the gap function \(\gamma _0\) on the bit bottom surface \(\partial B_\cup \). This problem can be solved as follows.
First, by recollecting Eqs. (11) and (12), we can write
Therefore, Eqs. (39) and (40) yield
where \(\delta _0\) is the leading-order approximation for the bit displacement.
Let \(\mathbf{r}(\alpha _1,\alpha _2)\) be the radius-vector of the surface \(\partial B_\cup \). Then, the displaced surface \(\partial B_\cup ^\delta \) can be defined by the radius-vector \(\mathbf{r}(\alpha _1,\alpha _2)-\delta \mathbf{i}_3\), where \(\mathbf{i}_3\) is the \(x_3\)-axis unit vector. It is to emphasize that, because \(\partial B_\cup ^\delta \) is obtained from \(\partial B_\cup \) by translation along the vertical, the normal vector \(\varvec{\nu }(\alpha _1,\alpha _2)\) of the surface \(\partial B_\cup \) will serve as the normal vector for the surface \(\partial B_\cup ^\delta \) as well. Therefore, the unknown surface \(\partial \varOmega _\cup \) can be approximated by the radius vector
where \(\delta _0\) and \(\gamma _0^\delta (\varvec{\alpha })\) are given by Eqs. (41) and (39), respectively.
Thus, since the parametrization (42) is known, the gap \(\gamma _0^\delta (\varvec{\alpha })\) between the surface \(\partial B_\cup \) and the surface defined by Eq. (42), which is measured from the surface \(\partial B_\cup \) in the direction of the vector \(\varvec{\nu }(\varvec{\alpha })\) can be determined by direct calculations.
Finally, the first-order approximation can be obtained by solving the boundary value problem
and using the equations
where the zero index refers to the leading-order approximations.
5 Example of cylindrical bit
Let B be a semi-infinite circular cylinder of unit radius, so that the surface \(\partial B_\cup \) coincide with the circular part \(0\le r\le 1\) of the plane \(z=0\). For this bit configuration, the leading-order approximation problem (35)–(37) represents a special case of the external Neumann problem for a semi-infinite cylinder studied in [29], i.e.,
where \(f_0\) is a constant,
The function \(U_0(r,z)\) is represented as follows [29]:
Here, \(J_0(x)\) and \(H_0^{(1)}(x)\) are Bessel functions of the first and third kind.
In turn, the functions \(A_0(\lambda )\) and \(B_0(\lambda )\) depend on the solution \(\omega _0(x)\) of the integral equation
via the function
as follows:
Here, \(I_1(x)\) and \(K_1(x)\) are modified Bessel functions of the first and second kind, \(\mathrm{Re}\) and \(\mathrm{Im}\) denote the real part and the imaginary part.
Let us rewrite Eq. (52) in the form
where we have introduced the notation
Then, the use of Taylor and asymptotic expansions of the modified Bessel functions yields
Observe that the solvability of singular integral equations (55) of type (56) was studied in detail in [30, 31].
To solve Eq. (55), we use the Bubnov–Galerkin method and look for the solution in the form of the expansion
where
and \(L_n(x)\) are the Laguerre polynomials defined as
The substitution of (57) into Eq. (55) results in the infinite system of linear algebraic equations
where
In view of (56), all integrals (59) are convergent. The infinite system (58) is then solved by truncation. Observe that by means of formula (3.353.5) from [32] the iterated improper integral (59)\(_2\) can be evaluated as follows:
Here, \(\mathrm{Ei}(x)\) is the exponential integral. We note also that the substitution of (57) into (53) leads to the integrals \(\int _0^\infty x^m \mathrm{{e}}^{-px}(\lambda ^2+x^2)^{-1}\,\mathrm{{d}}x\), which can be evaluated in terms of the sine and cosine integrals \(\mathrm{Si}(x)\) and \(\mathrm{Ci}(x)\).
In the problem under consideration, the following quantities are of interest:
Here, according to Eqs. (53) and (54), we have
Note that in the derivation of formula (63), we made use of the known relations \(H_0^{(2)}(\lambda )=J_0(\lambda )-\mathrm{{i}} Y_0(\lambda )\) and \(\bigl [H_0^{(2)}(\lambda )\bigr ]^\prime =-J_1(\lambda )+\mathrm{{i}} Y_1(\lambda )\).

Gap functions on the rupture front in the case of a flat-ended cylindrical bit
The results for the leading-order approximations for the relative displaced gap function \({\bar{\gamma }}^\delta =(\mu /p)\gamma ^\delta \) and the relative gap function \({\bar{\gamma }}=(\mu /p)\gamma \) under the bit’s base are shown in Fig. 3. It is interesting to observe that, since \(\mathbf{n}=\mathbf{e}_3\) and \(\varvec{\nu }=-\mathbf{e}_3\), the bottom surface \(\partial \varOmega _\cup \) of the bore-hole is concave (i.e., curving inward).
6 Discussion
Let us comment on the derivation of the linearized free boundary problem (35)–(37), and in particular to answer the question of why we have chosen the boundary conditions (36). Consider, first, the lateral boundary \(\partial B_\Vert \), where we have got two equations (29) and (33). By excluding the unknown function \(\gamma \), we arrive at the equation
Now, by accounting for Eq. (5) and the formula
where \(H=\bigl (R_1^{-1}+R_2^{-1}\bigr )/2\) is the mean curvature, and
we can rewrite Eq. (64) as follows:
Thus, it is readily seen that the second equation (36) has been obtained as a linearization of Eq. (65).
Further, the derivation of the nonlinear boundary condition from Eqs. (30) and (32) has been complicated by the presence of \(\gamma ^\delta \) along with \(\gamma \). For shallow surfaces, one can make use of the approximation \(\gamma ^\delta \simeq \gamma +\delta \varvec{\nu }\cdot \mathbf{i}_3\) and the equations \(\gamma ^\delta =u\) and \(\gamma ^\delta (O)=-\delta \) to obtain \(\gamma \simeq u+u(O)\nu _3\). The latter equation allows us to rewrite Eq. (30) in the form
Again, the linearization of Eq. (66) leads to the corresponding boundary condition (see Eq. (36)\(_1\)) for the leading-order approximation.
By analogy with the contact problem of drilling, which was formulated in [27], we can consider the following rupture front equation instead of Eq. (3):
Here, \(\nabla _s u\) is the gradient of the function u in the local orthogonal curvilinear coordinate system \(\mathbf{s}=(s_1,s_2)\) on the surface \(\partial \varOmega _\cup \), \(\sigma _c\) is a positive constant.
The boundary condition (67) should be supplemented by the inequality
which ensures the load transfer from the bit to the bore-hole surface.
Hence, in light of (68), Eq. (67) can be rewritten as follows:
The boundary condition (69) can be moved from the surface \(\partial \varOmega _\cup \) to the surface \(\partial B_\cup \), and in the light of leading-order approximation one can arrive at the following result:
Observe that the nonlinearity of Eq. (70) is due to the intrinsic nonlinearity of the boundary condition (67). Note that the solvability of the so-called exterior gravitational problem has been studied in [33, 34].
Another modification of the considered problem formulation that can be introduced by analogy with the deep drilling problem [27] is the assumption that only the bore-hole bottom surface \(\partial \varOmega _\cup \) is a free boundary, whereas the lateral surface \(\partial \varOmega _\Vert \) is assumed to be cylindrical with the radius determined by the homogeneous Neumann boundary condition (4) and the continuity with the adjacent part of the surface \(\partial \varOmega _\cup \). In this case, it can be shown that the linearized problem equations (35)–(38), (40), and (41) still hold. Note also that, by employing the terminology used in [35], such free boundary problem can be termed as partially overdetermined.
Finally, in the same way as it was done in Sect. 3, it can be shown that the boundary conditions from the free boundary \(\varGamma \) can be moved onto any nearby surface \(\varGamma _j\). This simple idea, together with a approximate rule for iteration of the boundary, forms the basis of numerical methods for free boundary problems. Assuming that \(u_j(\mathbf{x})\) solves the Neumann problem with the boundary condition
the new surface \(\varGamma _{j+1}\) can be found (see, e.g., [36]) by moving \(\varGamma _j\) in its normal direction \(\mathbf{n}^j\) so that
where \(\mathbf{x}^{j+1}=\mathbf{x}^j+\mathbf{n}^j d_j(\mathbf{x}^j)\), and the distance \(d_j(\mathbf{x}^j)\) is determined by the requirement that \(\mathbf{x}^{j+1}\) equals the right-hand side of the Dirichlet boundary condition (16). In a similar way, we can derive the \(j+1\)-th approximation (\(j=0,1,\ldots \)) for the gap function
In the iterative algorithm (72), the linearized free boundary problem (35)–(37) in the exterior of the surface \(\varGamma _j\) can be solved on each iteration starting from \(\varGamma _0=\partial B\).
It should be emphasized that the function \(\gamma _{j+1}\) denotes the gap between the surfaces \(\varGamma _j\) and \(\varGamma \) measured from the surfaces \(\varGamma _j\) in the direction of the normal vector \(\varvec{\nu }^j\), and the difference between the gaps \(\gamma _{j+1}\) and \(g_{j+1}\), which is measured from the corresponding point on the surface \(\varGamma \), was tentatively assumed to be small. At the same time under the latter assumption, the gap function \(g^\delta \), which enters the boundary condition (7), can be interpreted in terms of the distance function from \(\partial B^\delta _\cup \) to \(\varGamma \). Indeed, let \(\mathbf{x}\in \varGamma \) and \(\varvec{\alpha }\in \partial B^\delta _\cup \), where \(\varvec{\alpha }=(\alpha _1,\alpha _2)\) are the local curvilinear coordinates on \(\partial B\), such that \(\mathbf{r}(\varvec{\alpha })=\mathbf{x}+g^\delta (\mathbf{x})\mathbf{n}(\mathbf{x})\). Then, we have \(g^\delta (\mathbf{x})=\mathrm{dist}\bigl (\mathbf{r}(\varvec{\alpha }),\varGamma \bigr )\) and, therefore, the solution \(u_0(\mathbf{x})\) of the Neumann problem (35)–(37) yields \(g^\delta _0(\mathbf{x})=u_0\bigl (\mathbf{r}(\varvec{\alpha })\bigr )\), where \(\varvec{\alpha }\in \partial B^\delta _\cup \). Thus, the iterative scheme (72) can be modified accordingly.
However, by using the specificity of the present problem, the new boundary iteration procedure can be formulated as follows. Given the j-th gap \(g_j(\mathbf{x})\) for \(\mathbf{x}\in \varGamma _j\), one can find \(\varvec{\alpha }^{j+1}(\mathbf{x})\in \partial B\) such that \(\mathbf{r}(\varvec{\alpha }^{j+1})=\mathbf{x}+g_j(\mathbf{x})\mathbf{n}^j(\mathbf{x})\), thereby parameterizing the surface \(\partial B\). Taking into account that for any \(\mathbf{x}\in \partial \varOmega _\cup ^j\), the boundary condition (7) applied on the boundary \(\varGamma _j\) yields \(g_j^\delta (\mathbf{x})\) and \(\delta _j=-u_j(O)\). Now, the new surface \(\partial \varOmega _\cup ^{j+1}\) can be determined so that
and the final extension of the surface \(\partial \varOmega _\cup ^{j+1}\) is determined by reinforcing the first boundary condition (14). We note that Eq. (72) determines the surface \(\partial \varOmega _\cup ^{j+1}\) by incorporating the geometry of Huygens’ principle (see, e.g., [37]).
Here, for consistency’s sake, we complement this discussion by taking a physical point of view with respect to the gradient boundary condition (3). Namely, in considering the scalar prototype problem, which is a simpler version of the elasticity problem that was introduced earlier in [23, 24], we may interpret the normal derivative \(\partial u_0/\partial \nu \) as the normal pressure and the tangential gradient \(\nabla _\alpha u_0\) as the tangential stress vector. In this way, one can introduce the following generalized fracture criterion:
Here, \(\alpha \), \(\beta \), and \(\lambda \) are dimensionless positive constants.
Thus, depending on its value, which is supposed to be determined experimentally, the parameter \(\lambda \) can be regarded as either small or large. This opens new possibilities for asymptotic analysis of the scalar prototype problem of deep percussive drilling.
References
Kinderlehrer D (1978) Variational inequalities and free boundary problems. Bull Am Math Soc 84:7–26
Crank J (1988) Free and moving boundary problems. Oxford University Press, Oxford
Chen G-Q, Shahgholian H, Vazquez J-L (2018) Free boundary problems: the forefront of current and future developments. Phil Trans R Soc A 373:20140285
Trappe J, Kroos J, Tixt C, Simon G (1994) On the shape and location of the keyhole in penetration laser welding. J Phys D Appl Phys 27:2152–2154
Solana P, Kapadia P, Dowden JM, Marsdenk PJ (1999) An analytical model for the laser drilling of metals with absorption within the vapour. J Phys D Appl Phys 32:942–952
Hintermueller M, Kovtunenko VA, Kunisch K (2007) An optimization approach for the delamination of a composite material with non-penetration. In: Glowinski R, Zolesio J-P (eds) Free and moving boundaries: analysis, simulation and control, vol 252. Lecture notes pure appl math. Chapman and Hall/CRC Press, Boca Raton, FL, pp 331–348
Pilipenko D, Spatschek R, Brener EA, Müller-Krumbhaar H (2007) Crack propagation as a free boundary problem. Phys Rev Lett 98:015503
Mishuris G, Rogosin S, Wrobel M (2014) Hele-Shaw flow with a small obstacle. Meccanica 49:2037–2047
Peck D, Rogosin SV, Wrobel M, Mishuris G (2016) Simulating the Hele-Shaw flow in the presence of various obstacles and moving particles. Meccanica 51:1041–1055
Ponter ARS (1966) On plastic torsion. Int J Mech Sci 8:227–235
Argatov I (2010) Asymptotic models for optimizing the contour of multiply-connected cross-section of an elastic bar in torsion. Int J Solids Struct 47:1996–2005
Acker A (1988) Convergence results for an analytical trial free-boundary method. IMA J Num Anal 8:357–364
Harbrecht H, Mitrou G (2014) Improved trial methods for a class of generalized Bernoulli problems. J Math Anal Appl 420:177–194
Eppler K, Harbrecht H (2006) Efficient treatment of stationary free boundary problems. Appl Num Math 56:1326–1339
Ben Abda A, Bouchon F, Peichl GH, Sayeh M, Touzani R (2013) A Dirichlet–Neumann cost functional approach for the Bernoulli problem. J Eng Math 81:157–176
Harbrecht H (2008) A Newton method for Bernoulli’s free boundary problem in three dimensions. Computing 82:11–30
Bouchon F, Clain S, Touzani R (2005) Numerical solution of the free boundary Bernoulli problem using a level set formulation. Comput Meth Appl Mech Eng 194:3934–3948
Serrin J (1971) A symmetry problem in potential theory. Arch Ration Mech Anal 43:304–318
Philippin GA (1990) On a free boundary problem in electrostatics. Math Meth Appl Sci 12:387–392
Reichel W (1997) Radial symmetry for elliptic boundary-value problems on exterior domains. Arch Ration Mech Anal 137:381–394
Li D, Li Z (2016) Some overdetermined problems for the fractional Laplacian equation on the exterior domain and the annular domain. Nonlinear Anal 139:196–210
Bianchini C (2012) A Bernoulli problem with non-constant gradient boundary constraint. Appl Anal 91:517–527
Mikhailov SE (2005) Boundary-domain integro-differential equation of elastic damage mechanics model of stationary drilling. In: Selvadurai APS, Tan CL, Aliabadi MH (eds) Advances in boundary element techniques, vol 6. EC Ltd, Eastleigh, pp 107–114
Mikhailov SE, Namestnikova IV (2005) Quasi-static stationary-periodic model of percussive deep drilling. In: Barla G, Barla M (Eds) Proceedings of the eleventh international conference on computer methods and advances in geomechanics, Bologna, Patron Editore, vol 1, pp 103–109
Argatov II, Fadin YA (2011) A macro-scale approximation for the running-in period. Tribol Lett 42:311–317
Páczelt I, Baksa A, Mróz Z (2016) Contact optimization problems for stationary and sliding conditions. In: Neittaanmäki P, Repin S, Tuovinen T (eds) Mathematical modeling and optimization of complex structures, vol 40. Computational methods in applied sciences. Springer, Cham, pp 281–312
Mikhailov SE, Namestnikova IV (2006) Numerical solution of a free-boundary problem for percussive deep drilling modeling by BEM. In: Gatmiri B, Sellier A, Aliabadi MH (eds) Advances in boundary element techniques, vol VII. EC Ltd, Eastleigh, pp 15–22
Lebovitz NR (1982) Perturbation expansions on perturbed domains. SIAM Rev 24:381–400
Beliaev SI, Kuz’min IN (1980) The external Neumann problem for a semi-infinite cylinder. J Appl Math Mech 44:241–245
Mishuris GS (1995) On a class of singular integral equations. Demonstr Math 28:781–794
Mishuris GS (1999) Stress singularity at a crack tip for various intermediate zones in bimaterial structures (mode III). Int J Solids Struct 36:999–1015
Gradshteyn IS, Ryzhik IM (1980) Table of integrals, series, and products. Academic Press, New York
Backus GE (1968) Application of a non-linear boundary value problem for Laplace’s equation to gravity and geomagnetic intensity surveys. Q J Mech Appl Math 21:195–221
Jorge MC (1987) Local existence of the solution to a nonlinear inverse problem in gravitation. Q Appl Math 45:287–292
Fragalà I, Gazzola F (2008) Partially overdetermined elliptic boundary value problems. J Differ Eqs 245:1299–1322
Kuster CM, Gremaud PA, Touzani R (2007) Fast numerical methods for Bernoulli free boundary problems. SIAM J Sci Comput 29:622–634
Tsai YR (2002) Rapid and accurate computation of the distance function using grids. J Comput Phys 178:175–195
Acknowledgements
Open access funding provided by Malmö University. The author is grateful to Professor Sergey Mikhailov for the hospitality during his stay at the Brunel University London, where this research was carried out.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License http://creativecommons.org/licenses/by/4.0/(http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Argatov, I.I. A scalar prototype problem of deep abrasive drilling with an infinite free boundary: an asymptotic modeling study. J Eng Math 118, 29–41 (2019). https://doi.org/10.1007/s10665-019-10012-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10665-019-10012-y