Abstract
The payload size and commercial availability of thermal infrared cameras mounted on drones has initiated a new wave in the potential for conservationists and researchers to survey, count and detect wildlife, even the most complex of habitats such as forest canopies. However, several fundamental design and methodological questions remain to be tested before standardized monitoring approaches can be broadly adopted. We test the impact of both the speed of drone flights and diel flight period on tropical rainforest canopy wildlife detections. Detection and identification rates differ between both flight speeds and diel time. Overall ~ 36% more detections were made during slower flight speeds, along with a greater ability to categorize taxonomic groups. Flights conducted at 3am resulted in ~ 67% more detections compared to flights conducted at 7am (the diel period with the lowest detection rate). However, 112% more detections could be identified to taxonomic group in 7am flights compared with 3am flights – due to the types of wildlife being identified and the assistance of the RGB camera. Although, this technology holds great promise for carrying out surveys in structurally complex and poorly known ecosystems like forest canopies, there is more to do in further methodological testing, and building automated post-processing systems. Our results suggest that drone studies in the same habitat types, with the same animal densities, could be off by multiples if flown during different times and/or at different speeds. The difference could be an alarming 5-6x variation in animal detections or identification depending on changes in these two factors alone.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The application of drones to survey, count and detect wildlife is a rapidly growing field, with great potential both for scientists and conservation practitioners. So far, drones have proven useful to accurately and efficiently make population counts for large lesser black-backed gull colonies (Larus fuscus; Rush et al. 2018), measure the density and biomass of jelly blubber (Catostylus mosaicus; Raoult and Gaston 2018), improve the precision of population estimates of Australian fur seals (Sorrell et al. 2019), count and measure west African crocodiles (Crocodylus suchus; Aubert et al. 2021), and have been used to accurately count hippopotamus (Hippopotamus amphibius) in the Okavango delta (Inman et al. 2019). In addition to counting animals, drones have also been used to survey for features associated with wildlife, such as caiman (Scarpa and Piña 2019), Sumatran orangutan (Pongo abelii; Wich et al. 2015) and chimpanzee (Pan troglodytes schweinfurthii) nests (Bonnin et al. 2018). Yet just 10% of ground-counted chimpanzee nests were identified by a fixed wing drone (Bonnin et al. 2018) – likely because detecting features or wildlife using red-blue-green (RGB) cameras alone is extremely challenging in complexly layered forested habitats.
The changing price and payload size of thermal infrared (TIR) cameras that can be mounted upon drones has initiated a new wave in the potential for applied aerial conservation and research efforts in even the most complex of habitats. For example, eastern gray kangaroos (Macropus giganteus) surveyed in Australia’s grass and shrublands, were better detected using TIR than RGB cameras (Brunton et al. 2020), a drone mounted with TIR detected 20% more nesting sea turtles and their tracks (principally Lepidochelys olivacea and Chelonia mydas) than on-the-ground patrollers along Costa Rica’s rugged Pacific coastline (Sellés-Ríos et al. 2022), and a TIR camera mounted on drones has been used to accurately determine white-tailed deer (Odocoileus virginianus) population densities in the southeastern US (Beaver et al. 2020). Thermal infrared cameras have also proven successful in counting fruit bats such as flying-foxes (Pteropus spp.), with estimates of colony size 2.05 and 1.92 times higher than ground-based counts by the experimenter and Australian government counters respectively, providing more accurate and precise population density counts (McCarthy et al. 2021, 2022). In terms of densely forested habitats, drones mounted with TIR cameras have been used to successfully survey ungulates including red deer (Cervus elaphus), Javan deer (Rusa timorensis) and water buffalo (Bubalus arnee) in coniferous and deciduous forests of Poland (Witczuk et al. 2017), and also wildlife in the tropics (Rahman and Rahman 2021). Rahman and Rahman (2021) surveyed an Indonesian forested-urban area (40% forested) to compare TIR with ground-based camera traps and transects. The drone mounted with the TIR camera detected animals in the canopy that were undetected by both ground-situated camera traps and human transect observers.
Yet only a handful of studies to date have tested the ability of drones mounted with TIR cameras to detect animals in dense tropical rainforest canopies (Burke et al. 2019a; Kays et al. 2019; Rahman and Setiawan 2020; Spaan et al. 2019). Spaan et al. (2019) found that detecting spider monkeys (Ateles geoffroyi) at sleeping sites was more effective than using ground-based techniques and Burke et al. (2019b) used a drone mounted with TIR to successfully detect Bornean orangutan (Pongo pygmaeus) and proboscis monkeys (Nasalis larvatus). Rahman and Setiawan (2020) assessed the performance of TIR in different forest cover classes in Indonesia and found that terrestrial species could be recorded in moderately forested vegetation types. Furthermore, they found that not only was detection of canopy animals possible in densely forested cover types but that non-forested areas proved the most difficult in differentiating between background temperatures and thermal signatures of wildlife.
In the only Neotropical forest assessment to date, and one of the most comprehensive exploratory TIR forest projects, Kays et al. (2019) used a drone mounted with a TIR camera to survey the wildlife of Barro Colorado’s canopy fauna in Panama. As with the study by Burke et al. (2019a) they compared their pilot drone surveys with efforts from ground-based observations. Generally, the drones were useful to detect canopy species (arboreal and semi-arboreal wildlife that live in the canopy and sub-canopy) but couldn’t detect sub-canopy terrestrial wildlife identified by ground-based observers. They found that arboreal mammals had body temperatures around 27 °C and were conspicuous in the thermal infrared imagery at night and early morning when the forest canopy was cool (23–25 °C) but were difficult to detect when the direct sunshine had heated up canopy vegetation to over 30 °C by mid-morning. They also found that species were difficult to identify from thermal infrared imagery alone but could be recognized from synchronized RGB images taken during daylight hours.
The potential of drones mounted with TIR cameras for the detection and assessment of canopy species is promising, especially as canopy wildlife are some of the most impacted species in relation to forest disturbance (Whitworth et al. 2019), yet many canopy species are typically difficult to survey. This has been done traditionally via challenging and labor-intensive ground-based surveys with binoculars (usually limited to diurnal survey transects, with some nocturnal efforts using spotlights from the ground), or more recently by the novel use of camera traps placed within the canopy (Whitworth et al. 2016). This second approach requires skilled climbers and moving heavy equipment on-foot through the forest. With a skilled drone operator, forest canopy surveys using a thermal camera could provide an efficient way of gathering monitoring data of arboreal rainforest populations.
Despite this impressive opportunity, there remains several fundamental design and methodological questions to be addressed before robust and standardized monitoring approaches can be established. Many of the settings in terms of flight speeds and best suitable times for flight detections are based on limited pilot data and have not been subjected to empirical or fine-scale testing. Here we use one of the first commercially available drones (Hensel et al. 2018) pre-mounted with a TIR-RGB capable camera to carry out repeat surveys of multiple transects in one of the largest and densely forested rainforest systems in Central America, and the Neotropics generally, Costa Rica’s Osa Peninsula.
Specifically, we test the speed of drone flight in terms of the effect on canopy wildlife detection and carry out standardized surveys across five time periods between previously identified viable diel periods. We assess overall observations, the proportion of observations that can be identified to either group or species level, determine how these response variables relate to flight time and speed and look to provide basic insights on the ability of observers to both detect and identify wildlife from imagery. We hypothesize that flight time, drone speed and expertise of observers all influence wildlife detections and identification. We predict that: (1) Over the same given area, a slower flight speed will result in a greater number of detections and identifications, as there is more time to detect animal movement within the dense canopy layers. (2) That different flight times will result in different detection rates and different groups of animals likely to be detected. And (3) That an expert drone pilot will be more skilled than a non-expert observer in detecting and identifying animals in the footage.
Materials and methods
Study site
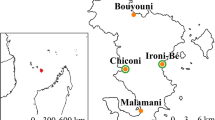
The Osa Peninsula in southwest Costa Rica is home to the largest remaining tract of Pacific lowland wet forest in Mesoamerica (Holdridge 1967) and consists of a network of protected areas containing both old growth (of which less than half of the original area remains; Weissenhofer et al. 2001) and secondary rainforest. There is also a landscape matrix on the peninsula, outside of the protected areas, of cattle farms, oil palm, agriculture, and timber plantations. The study site is situated at the Osa Conservation Campus (formerly known as Piro Biological Station; 8.40388 N, 83.33661 W; see Fig. 1), embedded within the Golfo Dulce Forest Reserve that connects Osa’s two National Parks – Corcovado and Piedras Blancas. Temperatures at the field site range between 23.4 and 28.8 °C (Whitworth et al. 2018). Rainfall averages 3,584 mm yr− 1 and is seasonal, with a rainy season from June to November and a dry season from December to May (Taylor et al. 2015). The campus is comprised of 1,982 ha of privately protected land with a variety of vegetation types, including old-growth primary forest, naturally regenerating secondary-growth forest and secondary plantation forest (for a detailed description see Whitworth et al. 2018). Our study flights were conducted in areas of old-growth primary forest and > 40-year-old naturally regenerating secondary-growth forest (see Fig. 1).

Map of study area. The yellow star in the inset map (top right), shows the location of the field site in Costa Rica, on the Osa Peninsula in the southern Pacific zone. The yellow star in the main map represents the Osa Biological Station (known locally as Piro), and the colored lines represent the four transect routes flown. Each transect is defined by a different color, the starting point of each transect is indicated by an “S” and the end point of each transect is indicated by an “E”.
Equipment and licenses
For this experiment, we used the Autel Robotics EVO II Dual 8 K Drone. The aircraft takeoff weight is 1150 g (2.5lbs). No flights were performed on rainy days or during wind speed over 26 km/h, following the security measures recommended for drone flights (Barreto et al. 2021). The equipment, licenses, and staff required during the drone-monitoring operation are described in Table S1, Supplementary Material.
Study design
A total of 40 flights were conducted to record wildlife in the canopy, along four transects, each ~ 4 km in total length, during April 2021 (late dry season) in forested habitat. The Autel Explorer application, along with verification against detailed contour maps, was used to lay out the flight transect plans, flight speeds, and flight altitudes. Kays et al. (2019) determined that flights by mid-morning caused the ambient temperature to be too hot to detect wildlife effectively (corroborated by our pilot flights at the study site). We also determined that after the end of the day, that the forest canopy was still too warm to effectively distinguish wildlife in the TIR imagery from the background heat maintained. We therefore focused our flights within the window of high TIR functionality. We performed five repeat flights per transect between 11pm and 7am, at intervals of every two-hours (flight take-off times for these five repeats were 11pm, 1am, 3am, 5am, and 7am). So, the 40 flights were carried out across 8 nights (see Supplementary Table S2 for a list).
To identify any effect of speed for wildlife detectability we flew the drone at two different speeds – 20 flights at 18 km/h and 20 flights at 10 km/h with a standard repeat across transects (ten flights over each transect) and time periods (eight at each time-period). Flights were carried out at 90-100 m of elevation above ground level as we determined that this would give us ~ 30-50 m clearance from the tree top level depending on canopy height and terrain changes and be sufficient to avoid eliciting distressing flight responses to the canopy wildlife; see Brunton et al. (2019). The camera angle was set to 90º.
Data processing was performed by the local drone pilot, an expert familiar with Costa Rican rainforest fauna, analyzing 660 min of x40 8k videos – both TIR, and where available, RGB (this was the data set utilized for the analyses in terms of flight time and speed effects). Sunrise at the site during April is ~ 5:25am and so RGB footage was only clear and useable by observers in the 7am flights. All processing was done at real speed, but all potential occurrences of thermal activity were stopped and investigated and replayed at as many times as needed where necessary to verify and check potential detections.
In addition, identifying individuals and species inhabiting the canopy from the drone footage could be challenging for a non-trained observer, so we conducted a simple study to compare the number of individuals observed and the species identification ability of our expert drone pilot against a non-specialist intern – observing all the videos from the drone flights. Detections were identified to the maximum detail possible (species, genus, or animal group - e.g., bird, bat, primate, etc.), and where not possible, they were left as “animal without identification”.
Statistical analysis
Flight speed and time
To identify differences in the number of detections and proportion of detections identifiable according to the drone flight speed and time of flight we ran Generalized Linear Mixed Models (GLMMs; glmer, R package ‘lme4’) with speed (two levels: 10 km/h and 18 km/h) and time (five levels: 11pm, 1am, 3am, 5am, and 7am) as the predictor variables; because each flight was performed in 4 transects, the transect identity was include as a random factor in the model. In total we test seven response variables to explore the effect of time and speed on species detection and identification: number of detections (a detection is defined as a group or a single animal, not as raw counts of individuals); number of identifiable detections (identified to group; i.e. primate, bird, bat, kinkajou/olingo, etc.); proportion of detections identified; number of detection identified as primates; proportion of detections of animals moving; number of detections identified as bats; and number of detections identified as birds. The Poisson distribution with a logarithm link function was used for all count data (after checking for overdispersion) and the Gaussian distribution with a link function was used for the proportion variables (after checking for linearity and homoscedasticity; Zuur et al. 2009). Tukey post-hoc comparisons were run to test for differences between the 5 flight times analyzed using the emmeans package in R (Lenth et al. 2021).
Species ID vs. observer
To test for differences between the expert and novice observer, we carried out three GLMMs with the number of detections, proportion of detections identifiable to group, and number of detections of primates as the response variables, the observer as the explanatory variable (two levels: high vs. low expertise), and transect ID was added as a random effect variable. All previous data analysis was performed using observations made by the high expertise observer.
Results
The expert observer drone pilot recorded 440 animal detections (782 individuals) across the 40 flights, totaling ~ 11 h of flight time. In total we encountered 45 detections of primates (Fig. 2a), 57 detections of birds (owls, toucans, and macaws; Fig. 2b), 72 detections of bats (Fig. 2c) and seven detections of kinkajou/olingos (Fig. 2d). The majority of detections (65%) could not be identified to taxonomic group (see Fig. 2e, Table S2 and Video S1 - Supplementary Materials).

Thermal infrared drone screenshots from the transects: (a) a troop of primates detected on transect ‘Forest West’ during the 5am flight, (b) a flying bird detected on transect ‘Forest West’ during the 7am flight, (c) a flying bat detected on transect ‘Forest West’ during the 1am flight, (d) a kinkajou/olingo detected on transect ‘Forest West’ during 1am flight, and (e) an unidentified animal. Imagery is ~ 90-100 m above ground level, and ~ 30-50 m clearance from the canopy level. The camera angle was set to 90º.
Flight speed
More detections were made on flights conducted at the slower flight speed of 10 km/h compared with the faster speed at 18 km/h (a mean of 14.4 detections/flight ± 1.16 vs. 10.6 ± 0.93 respectively: X21,4 = 11.53, p = 0.0007 – Fig. 3a). Slower flight speeds also doubled the absolute number of detections that could be categorized to taxonomic group (5.95 detections/flight ± 1.07 vs. 2.85 ± 1.07; X21,4 = 11.93, p = 0.0005 – Fig. 3c), with 1.46x greater proportion of detections that could be identified at slower speeds (0.41 ± 0.06 vs. 0.28 ± 0.06; X21,4 = 10.90, p = 0.0009 – Fig. 3e). However, the number of primate detections was variable among transects at both flight speeds, with detections higher at faster flight speed, though not significantly so (0.52 ± 0.16 vs. 0.88 ± 0.22; X21,4 = 2.75, p = 0.097 – Fig. 3a). Finally, the proportion of detections of moving animals was ~ 1.5x greater at the slower flying speed (0.44 ± 0.06 vs. 0.29 ± 0.06; X21,4 = 14.60, p = 0.0001 – Fig. 3c).

Variation in wildlife detections and identification across time and speed of drone flights; (a) number of wildlife detections vs. drone speed flight; (b) number of wildlife detections vs. flight time; (c) identifiable detections vs. drone speed flight; (d) identifiable detections vs. flight time; (e) proportion of identifiable detections vs. drone speed flight; (f) proportion of identifiable detections vs. flight time.
Time of day
The overall number of detections varied according to the flight time (X21,4 = 13.36, p = 0.009). More individuals were recorded in flights conducted at 3 am (mean of 14.99 ± 1.59 detections/flight), followed by 1 am (13.64 ± 1.50), and lowest at 7 am (8.97 ± 1.16; Fig. 4b, Table S3 - Supplementary Materials). In addition, the number and proportion of identifiable detections also varied across diel times (X21,4 = 9.29, p = 0.054 and X21,4 = 72.43, p < 0.0001, respectively). The number of detections and proportion of identifiable detections were highest in 7am flights (6.88 ± 1.32 detections/flight identified and 0.74 ± 0.07 proportion of detections identified), with consistently lower levels in all nocturnal flights. The lowest number of rate of detections/flight was at 11pm (3.12 ± 1.32) and at 3 am for the proportion of identified detections/flight (0.20 ± 0.07; Fig. 4d and f, Table S3 - Supplementary Materials) − 55% and 73% lower than 7am flights, respectively. The identification of primates was high within both the 5am and 7am flight times (1.93 ± 0.49 and 2.30 ± 0.54 primate detections/flight, respectively) and low across all nocturnal flights, being the lowest found at 3 am (0.24 ± 0.17 – X21,4 = 23.24, p = 0.0001; Fig. 4b, Table S3 – Supplementary Materials). The proportion of moving animal detections was higher at 7am (0.72 ± 0.07) compared with the rest diel time of flights, being the lowest at 11 pm (0.20 ± 0.07 – X21,4 = 89.63, p < 0.0001; Fig. 4d, Table S3 – Supplementary Materials). Bats were identifiable from their rapid movement in the canopy but were only detected during nocturnal flights, with the highest number of bat detections at 1 am and 3 am (2.60 ± 0.79 and 2.30 ± 0.71 detections/flight respectively – X21,4 = 15.04, p = 0.005 – Fig. 4e); while bird detections were mostly restricted to the morning flights, being the highest at 7 am (3.09 ± 0.76 detections/flight) and low detection rates at 11 pm (0.71 ± 0.28 detections/flight – X21,4 = 15.17, p = 0.004; Fig. 4f, Table S3 – Supplementary Materials).

Variation in different taxonomic groups detections across time and speed of drone flight; (a) number of primate detections vs. drone speed flight; (b) number of primates detections vs. flight time; (c) proportion of detections with animals observed moving vs. drone speed flight; (d) proportion of detections with animals observed moving vs. flight time; (e) number of bats detected vs. flight time; (f) number of birds detected vs. flight time.
Observer expertise
Our results showed that the overall number of detections did not vary with the expertise of the observer (17.7 ± 2.06 detections found by the observer with less expertise and 19.2 ± 2.06 detections by the observer with more expertise – X21 = 0.37, p = 0.54 (Fig. 5a). However, differences were found in the proportion of detections which were identified by each observer; the person with more expertise in local fauna was able to identify more than twice the proportion than the novice observer (0.35 ± 0.04 vs. 0.15 ± 0.04, respectively – X21 = 21.11, p < 0.0001 (Fig. 5b). The person with more expertise was also able to identify 16x more primate detections than the person with less expertise (2.93 ± 0.64 vs. 0.18 ± 0.64 primates/flight, respectively – X21 = 51.81, p < 0.0001; Fig. 5c).

Differences in (a) number of detections, (b) proportion of detections identified, and (c) number of primate detections; all between the expert and novice observers identifying wildlife from the drone footage.
Discussion
Understanding the effects of methodological variation is critical in the early testing of any burgeoning technology field (Doull et al. 2021). We explored the effects of varying flight speed and flight time of day on the potential to survey and monitor forest canopy wildlife using a commercial grade TIR-RGB camera mounted drone and provide initial insight as to how the ability of human observers can affect post-processing of detections. As we predicted, canopy wildlife detection rates and identification ability differed substantially between both flight speeds and diel time of flights. However, the preferred methodological settings are nuanced and dependent upon the specific research subjects or monitoring targets in question, especially because flights within different diel times detect different subsets of canopy fauna. Although our local expert drone pilot was able to identify and categorize 16x more records to group/species than the novice observer, both were able to detect similar numbers of records from flight imagery. Below we explore these nuances around flight speed, diel flight times, and observer effects, and discuss the applications and advances around the future potential application of TIR-RGB camera mounted drones for standardized canopy wildlife surveys and monitoring.
Flight speed
In terms of flight speed, there is a conceived trade-off between the distance that can be travelled due to battery life limitation (Coops et al. 2019), and the speed at which a drone can travel, i.e., flying faster might cover more ground, but flying slower might avoid missing potential detections. In our case, covering the same flight distance at the slower speed resulted in ~ 36% more detections, ~ 109% more identified detections/flight, a ~ 46% increase in the proportion of detections that could be identified, and a ~ 52% greater probability of detecting animals moving. So, if we want to gather more accurate counts, then slower flight speeds are likely preferable. Our drone operator and expert reviewer stated that the enhanced ability to observe the movement of identified targets in the slower flights helped to identify what the animal was. However, there is no difference in the detectability of large-bodied and gregarious primates in flying slower or faster. Our pilot stated that this was due to the RGB footage available in the 7am flights that aids in the identification of records first detected in the TIR imagery. The pilot observer also stated that the primates are typically larger and generally more gregarious than most of the other canopy fauna in this ecosystem and as such, were easier to identify. In summary, more ground can be covered with faster flights for an equal number of records for large-bodied gregarious primates (if RGB footage is utilized), but nocturnal surveys and counts for other more cryptic wildlife (that only utilize TIR imagery) should be carried out at slower speeds. This is a factor that should be considered and tested for drone wildlife surveys more broadly, across an array of wildlife groups, habitats and vegetation types.
Although both of our post-processing human reviewers were able to detect similar numbers of records from flight imagery, comparing just two observers is not sufficient to be sure that this would be the case across a greater number of observers. Linchant et al. (2018) found that observers with training were more adept at identifying the common hippopotamus (Hippopotamus amphibius) in drone imagery and found high levels of agreement within trained observers (Linchant et al. 2018). Similar moderate to high levels of observer agreement have been identified within tropical forest canopy habitat similar to ours, specifically for spider monkeys (Ateles geoffroyi; Spaan et al. 2022). Our local expert drone pilot was able to identify and categorize a much greater number of records (16x) than the novice observer – an indication that differences will occur with human observers if information is needed beyond general counts; arguing for a machine learning (ML) approach to standardize surveys and avoid challenges related with variability in human performance (Corcoran et al. 2021). We had both observers label video footage which can now provide the basis for ML developers to build processing models to automate detections in the future (Corcoran et al. 2021). Building this post-processing workflow will be a necessary next step toward building comprehensive canopy wildlife monitoring programs (Coops et al. 2019).
It is plausible that automated techniques won’t be subject to the same differences in relation to flight speeds and the ability to detect and identify wildlife as human observers. Where human observers might not detect the most subtle temperature signals hidden by vegetation and in fast moving imagery, automated techniques might be trained to do so. However, our expert observer felt confident that they were not missing observations in faster footage speeds (as they had the ability to pause and check and go back as many times as necessary on any potential signal), but stated that faster flights meant that animals didn’t have chance to move or come out of canopy cover as they did in the slower drone flights (see Spaan et al. 2022). As such, machine learning wouldn’t necessarily result in more detections, but provide faster imagery processing power. A study to assess playback speeds with naïve observers might be a good way to confirm that this is not an effect of playback speed, and a true effect of drone detection.
Machine learning techniques that take advantage of multiple observation points, or the movement patterns detected in video, could greatly enhance the ability to distinguish among animal species/groups – a factor that our non-expert observer struggled to execute confidently. Additionally, automated processing via ML and artificial intelligence (AI) algorithms would provide a basis for efficiently handling the volume of large sized imagery data sets. This is especially true if the aim is to carry out regular flight surveys that could be used to monitor canopy wildlife across seasons, long-term temporal periods, habitat types, disturbance impacts and management regimes.
Time of day
In addition to detection differences of specific wildlife groups being attributed to flight speed, diel time of flights showed a marked difference in the subsets of wildlife likely to be detected. Although Kays et al. (2019) determined that flights by mid-morning caused the ambient temperature to be too hot to detect wildlife effectively, much of their flight work was exploratory and their two study surveys were only carried out in early morning. Our standardized diel assessment during the high efficacy window for TIR technology in tropical rainforest habitat (from 11pm to 7am) allowed us to explore not only when overall detection rates are highest, but also how these different diel periods are suited to surveys of particular groups of wildlife.
Flights conducted at 3am (TIR only) resulted in ~ 67% more records compared with 7am flights (TIR + RGB). However, ~ 112% more detections were identifiable in 7am flights (a ~ 55% increase in the proportion of records that could be identified in flights at 7am compared with 3am flights). This could be related to two key reasons: (1) Physical - that the light levels and complementary RGB footage filming in parallel can help to aid identification ability in the 7am flights, and (2) Behavioral - that the species active diurnally are generally large and live in gregarious groups (e.g., spider monkey; Ateles geoffroyi, howler monkey; Alouatta palliata, and white-faced capuchin monkey; Cebus imitator) compared with some of the more cryptic and smaller nocturnal living species (e.g., kinkajou, Potos flavus; olingo, Bassaricyon gabbii; Mexican hairy dwarf porcupine, Coendou mexicanus and opossums). Kays et al. (2019) suggests that illumination from the drone over the canopy during the nocturnal flights might allow the RGB camera to gather complementary footage to better identify nocturnal wildlife. This would also help to tease apart the effects of the physical and behavioral, potentially co-occurring effects. Additionally, improved resolution of TIR cameras could allow for more accurate, species level, identifications (Burke et al. 2019b; Witczuk et al. 2017).
Understanding diel patterns and methodological effects is key if we are to build standardized monitoring guidelines. Carrying out different diel flights for example, can provide the most comprehensive characterization profile of overall canopy fauna, and slower flight speeds are useful to maximize the potential to gather records and aid identification. Flights across various diel periods might be the most effective way to determine a faunal profile of a given rainforest habitat, such as the relative occurrence of primates vs. birds vs. bats vs. other nocturnal fauna in a habitat or between survey locations. Or maybe the goal is to develop a monitoring approach for a specific target group, such as primates. Our results suggest in this case that primate monitoring would be most efficient during early morning 7am flights, when movement rates of species are at their greatest, RGB footage is a useful aid, and the background canopy temperature is still cool enough to easily detect animals in the canopy. The combination of animal movement, and availability of the RGB footage allow for species to easily be detectable, and for this group, faster flight speeds can be used allowing for more survey area to be covered within a given flight.
That said, slower speeds are useful for enhancing the opportunity to record and identify less conspicuous fauna that might also be of interest. As drones and batteries continue to be improved, these limitations in flight speed restrictions vs. coverage can be overcome (Coops et al. 2019). Larger and commercially available fixed drones for example can fly far longer, compared to the ~ 25 min of the commercially available multirotor drone used in this study. But they might not be able to fly at the slower speeds necessary for effective identification or have the potential to hover like a multirotor. Some surveys for example might wish to hover above specific fruiting trees or be able to follow specific animals or groups once located, and therefore the abilities of a multirotor drone will be necessary. Lighter-than-air airships could be an even better platform due to their ability to fly at very slow speeds, and the ability to have periods of silence, which would allow simultaneous acoustic detection as well, particularly important for cryptic mammals and bats (see Gili et al. 2021).
Before standardized approaches for forest canopy thermal monitoring can be adopted there remains several additional factors to be tested. Burke et al. (2019) for example determined that a specific angle of the camera could better detect rare riverine rabbits than cameras pointed directly downwards – but so far there is no understanding as to how this might affect forest canopy surveys. One might predict that as forest canopies are three-dimensional and structurally complex, that camera angle might not have such an effect as with the simpler habitat in which the rabbits were surveyed – but this remains to be tested. Another challenge still to be investigated in detail includes the height above the canopy and the focal length/FOV of the camera. Flying too low could create issues inducing flight responses in some species (Brunton et al. 2019; Duporge et al. 2021), but Spaan et al. (2022) found that flying just 10 m above the canopy layer did not illicit any flight response in spider monkeys, only triggering on occasion some alarm and contact calls. We flew slightly higher than the height flown by Kays et al. (2019) and Spaan et al. (2022), as we were concerned that some of the ancient emergent trees of Osa’s forest could be dangerously close to the drone (a model that cannot track terrain but must be pre-programmed based on waypoints and terrain layers), so we wanted to ensure safe clearance on all the routes. Flying higher and having a higher zoom reduces the footprint but increases the number of pixels in any animal, aiding detection and identification. Higher resolution sensors could facilitate higher flights without losing pixel quality when using zoom functions.
The technology clearly holds great promise as a survey tool to gather data on wildlife that is traditionally challenging to survey from the ground, problematic to detect at night (Burke et al. 2019) and in areas of challenging terrain, or areas deemed unsafe for observers – due to hunting or other illegal activities. High definition RGB canopy monitoring has already led to detection rates attractive enough for the potential use of occupancy modeling techniques for spider monkeys (Spaan et al. 2022), and if the same is true that has been shown for kangaroos and deer, then TIR-RGB cameras could increase detectability rates and accuracy of counts even further (Beaver et al. 2020; Brunton et al. 2020). As the technology becomes more financially attractive (Spaan et al. 2022), there is promising evidence for numerous applications (e.g., Beaver et al. 2020; Burke et al. 2019; Spaan et al. 2019) that subsequently we should expect to see the continued expansive exploration of approaches, and eventual implementation of large-scale forest canopy monitoring systems. Automated identification using machine learning and the application of airborne optical sectioning to remove canopy obscuring animals will be large steps forward towards establishing canopy monitoring system (e.g., Schedl et al. 2020, 2021).
Our efforts show that there are significant next steps in further testing of methodological variables, and in terms of building automated post-processing systems before the technology might be used in favor of more traditional or alternative census techniques (Brunton et al. 2020; Spaan et al. 2022). We show that simple variations in time of day and flight speed can more than double detections and more than triple identification potential of detections – resulting in what could be an alarming 5-6x variation in animal detections or identification. Multiple groups doing studies in the same vegetation types would be off by multiples, even if they flew over the same animal densities, due to the time of day and/or speed that they flew. Such variations need to be well understood and a focus of future studies, so that standardized approaches for given target animals or habitat types can be adopted.
Data Availability
Data available from author the authors upon reasonable request. Code available from author CP upon reasonable request.
References
Aubert C, Moguédec G, Assio C, Blatrix R, Ahizi MN, Hedegbetan GC, Kpera NG, Lapeyre V, Martin D, Labbé P, Shirley MH, Aubert C, le Moguédec G, Assio C, Blatrix R, Ahizi MN, Hedegbetan GC, Kpera NG, Lapeyre V, Shirley MH (2021) Evaluation of the use of drones to monitor a diverse crocodylian assemblage in West Africa. Wildl Res. https://doi.org/10.1071/WR20170
Barreto J, Cajaíba L, Teixeira JB, Nascimento L, Giacomo A, Barcelos N, Fettermann T, Martins A (2021) Drone-Monitoring: Improving the Detectability of Threatened Marine Megafauna. Drones 5(1):1–14. https://doi.org/10.3390/DRONES5010014
Beaver JT, Baldwin RW, Messinger M, Newbolt CH, Ditchkoff SS, Silman MR (2020) Evaluating the Use of Drones Equipped with Thermal Sensors as an Effective Method for Estimating Wildlife. Wildl Soc Bull 44(2):434–443. https://doi.org/10.1002/WSB.1090
Bonnin N, van Andel AC, Kerby JT, Piel AK, Pintea L, Wich SA (2018) Assessment of Chimpanzee Nest Detectability in Drone-Acquired Images. Drones 2(2):17. https://doi.org/10.3390/DRONES2020017
Brunton E, Bolin J, Leon J, Burnett S (2019) Fright or Flight? Behavioural Responses of Kangaroos to Drone-Based Monitoring. Drones 3(2):41. https://doi.org/10.3390/DRONES3020041
Brunton EA, Leon JX, Burnett SE (2020) Evaluating the Efficacy and Optimal Deployment of Thermal Infrared and True-Colour Imaging When Using Drones for Monitoring Kangaroos. Drones 4(2):20. https://doi.org/10.3390/DRONES4020020
Burke C, Rashman MF, Longmore SN, McAree O, Glover-Kapfer P, Ancrenaz M, Wich SA (2019a) Successful observation of orangutans in the wild with thermal-equipped drones. J Unmanned Veh Syst 7(3):235–257. https://doi.org/10.1139/JUVS-2018-0035
Burke C, Rashman M, Wich S, Symons A, Theron C, Longmore S (2019b) Optimizing observing strategies for monitoring animals using drone-mounted thermal infrared cameras. Int J Remote Sens 40(2):439–467. https://doi.org/10.1080/01431161.2018.1558372
Coops NC, Goodbody TRH, Cao L (2019) Four steps to extend drone use in research. Nature 572:433–435. https://doi.org/10.1038/d41586-019-02474-y
Corcoran E, Winsen M, Sudholz A, Hamilton G (2021) Automated detection of wildlife using drones: Synthesis, opportunities and constraints. Methods Ecol Evol 12(6):1103–1114. https://doi.org/10.1111/2041-210X.13581
Doull KE, Chalmers C, Fergus P, Longmore S, Piel AK, Wich SA (2021) An Evaluation of the Factors Affecting ‘Poacher’ Detection with Drones and the Efficacy of Machine-Learning for Detection. Sensors 21(12):4074. https://doi.org/10.3390/S21124074
Duporge I, Spiegel MP, Thomson ER, Chapman T, Lamberth C, Pond C, Macdonald DW, Wang T, Klinck H (2021) Determination of optimal flight altitude to minimise acoustic drone disturbance to wildlife using species audiograms. Methods Ecol Evol 12(11):2196–2207. https://doi.org/10.1111/2041-210X.13691
Gili P, Civera M, Roy R, Surace C (2021) An unmanned lighter-than-air platform for large scale land monitoring. Remote Sens 13(13):2523. https://doi.org/10.3390/rs13132523
Hensel E, Wenclawski S, Layman CA, Hensel E, Wenclawski S, Layman CA (2018) Using a small, consumer-grade drone to identify and count marine megafauna in shallow habitats. Latin Am J Aquat Res 46(5):1025–1033. https://doi.org/10.3856/VOL46-ISSUE5-FULLTEXT-15
Holdridge LR (1967) Life zone ecology. Life Zone Ecology (rev. ed.)
Inman VL, Kingsford RT, Chase MJ, Leggett KEA (2019) Drone-based effective counting and ageing of hippopotamus (Hippopotamus amphibius) in the Okavango Delta in Botswana. PLoS ONE 14(12):e0219652. https://doi.org/10.1371/JOURNAL.PONE.0219652
Kays R, Sheppard J, Mclean K, Welch C, Paunescu C, Wang V, Kravit G, Crofoot M (2019) Hot monkey, cold reality: surveying rainforest canopy mammals using drone-mounted thermal infrared sensors. Int J Remote Sens 40(2):407–419. https://doi.org/10.1080/01431161.2018.1523580
Lenth Rv, Buerkner P, Herve M, Love J, Miguez F, Riebl H, Singmann H (2021) Package “emmeans” Type Package Title Estimated Marginal Means, aka Least-Squares Means. https://doi.org/10.1080/00031305.1980.10483031
Linchant J, Lhoest S, Quevauvillers S, Lejeune P, Vermeulen C, Ngabinzeke JS, Belanganayi BL, Delvingt W, Bouché P (2018) UAS imagery reveals new survey opportunities for counting hippos. PLoS ONE 13(11):e0206413. https://doi.org/10.1371/JOURNAL.PONE.0206413
McCarthy ED, Martin JM, Boer MM, Welbergen JA (2021) Drone-based thermal remote sensing provides an effective new tool for monitoring the abundance of roosting fruit bats. Remote Sens Ecol Conserv 7(3):461–474. https://doi.org/10.1002/RSE2.202
McCarthy ED, Martin JM, Boer MM, Welbergen JA (2022) Ground-based counting methods underestimate true numbers of a threatened colonial mammal: an evaluation using drone-based thermal surveys as a reference.Wildlife Research. https://www.publish.csiro.au/WR/WR21120
Rahman DA, Rahman AAAF (2021) Performance of unmanned aerial vehicle with thermal imaging, camera trap, and transect survey for monitoring of wildlife. IOP Conference Series: Earth and Environmental Science 771(1): 012011. https://doi.org/10.1088/1755-1315/771/1/012011
Rahman DA, Setiawan Y (2020) Possibility of applying unmanned aerial vehicle and thermal imaging in several canopy cover class for wildlife monitoring-preliminary results. E3S Web of Conferences: 211. https://doi.org/10.1051/e3sconf/202021104007
Raoult V, Gaston TF (2018) Rapid biomass and size-frequency estimates of edible jellyfish populations using drones. Fish Res 207:160–164. https://doi.org/10.1016/J.FISHRES.2018.06.010
Rush GP, Clarke LE, Stone M, Wood MJ (2018) Can drones count gulls? Minimal disturbance and semiautomated image processing with an unmanned aerial vehicle for colony-nesting seabirds. Ecol Evol 8(24):12322–12334. https://doi.org/10.1002/ECE3.4495
Scarpa LJ, Piña CI (2019) The use of drones for conservation: A methodological tool to survey caimans nests density. Biol Conserv 238:108235. https://doi.org/10.1016/J.BIOCON.2019.108235
Schedl DC, Kurmi I, Bimber O (2020) Airborne optical sectioning for nesting observation. Sci Rep 10(1):1–7
Schedl DC, Kurmi I, Bimber O (2021) An autonomous drone for search and rescue in forests using airborne optical sectioning. Sci Rob 6(55):eabg1188
Sellés-Ríos B, Flatt E, Ortiz-García J, García-Colomé J, Latour O, Whitworth A (2022) Warm beach, warmer turtles: using drone-mounted thermal infrared sensors to monitor sea turtle nesting activity. Front Conserv Sci 66. https://doi.org/10.3389/fcosc.2022.954791
Sorrell KJ, Clarke RH, Holmberg R, McIntosh RR (2019) Remotely piloted aircraft improve precision of capture–mark–resight population estimates of Australian fur seals. Ecosphere 10(8):e02812. https://doi.org/10.1002/ECS2.2812
Spaan D, Burke C, McAree O, Aureli F, Rangel-Rivera CE, Hutschenreiter A, Longmore SN, McWhirter PR, Wich SA (2019) Thermal infrared imaging from drones offers a major advance for spider monkey surveys. Drones 3(2):1–19. https://doi.org/10.3390/drones3020034
Spaan D, di Fiore A, Rangel-Rivera CE, Hutschenreiter A, Wich S, Aureli F (2022) Detecting spider monkeys from the sky using a high-definition RGB camera: a rapid-assessment survey method? Biodivers Conserv 1–18. https://doi.org/10.1007/S10531-021-02341-1
Taylor P, Asner G, Dahlin K, Anderson C, Knapp D, Martin R, Mascaro J, Chazdon R, Cole R, Wanek W, Hofhansl F, Malavassi E, Vilchez-Alvarado B, Townsend A (2015) Landscape-scale controls on aboveground forest carbon stocks on the Osa Peninsula, Costa Rica. PLoS ONE 10(6). https://doi.org/10.1371/JOURNAL.PONE.0126748
Weissenhofer A, Huber W, Zamora N, Weber A, Gonzalez J (2001) A brief outline of the flora and vegetation of the Golfo Dulce region. An Introductory Field Guide to the Flowering Plants of the Gulfo Dulce Rainforests, Costa Rica: Corcovado National Park and Piedras Blancas National Park. Stapfia 78
Whitworth A, Beirne C, Flatt E, Huarcaya R, Cruz J, Forsyth A, Molnar P, Soto V, J (2018) Secondary forest is utilized by Great Curassows (Crax rubra) and Great Tinamous (Tinamus major) in the absence of hunting. The Condor: Ornithological Applications 120(4):852–862
Whitworth A, Beirne C, Huarcaya RP, Whittaker L, Rojas SJS, Tobler MW, Macleod R (2019) Human disturbance impacts on rainforest mammals are most notable in the canopy, especially for larger-bodied species. Divers Distrib 25(7). https://doi.org/10.1111/ddi.12930
Whitworth A, Braunholtz LD, Huarcaya RP, Macleod R, Beirne C (2016) Out on a limb: Arboreal camera traps as an emerging methodology for inventorying elusive rainforest mammals.Tropical Conservation Science9(2)
Wich S, Dellatore D, Houghton M, Ardi R, Koh LP (2015) A preliminary assessment of using conservation drones for Sumatran orang-utan (Pongo abelii) distribution and density. J Unmanned Veh Syst 4(1):45–52. https://doi.org/10.1139/JUVS-2015-0015
Witczuk J, Pagacz S, Zmarz A, Cypel M (2017) Exploring the feasibility of unmanned aerial vehicles and thermal imaging for ungulate surveys in forests - preliminary results. Int J Remote Sens 39:5504–5521. https://doi.org/10.1080/01431161.2017.1390621
Zuur AF, Ieno EN, Walker N, Saveliev AA, Smith GM (2009) Mixed effects models and extensions in ecology with R. https://doi.org/10.1007/978-0-387-87458-6
Acknowledgements
Thanks to the Gordon and Betty Moore Foundation, the Manitou Fund, the Bobolink Foundation, the International Conservation Fund of Canada, and the Troper Wojcicki Foundation for supporting this research, and to for their support of conservation in the Osa Peninsula. Finally, we thank the reviewers and the handling editor for their time and comments.
Funding
This work was supported by the Gordon and Betty Moore Foundation, the New Venture Fund, and the International Conservation Fund for Canada.
Author information
Authors and Affiliations
Contributions
AW, CP and EF conceived and designed the experiments. JO, CP and AW performed the experiments. CP analyzed the data. AW, MS and CP wrote the manuscript; all authors provided editorial advice.
Corresponding author
Ethics declarations
Competing interests
The authors declare no conflicts of interest.
Additional information
Communicated by P. Ponel.
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
This article belongs to the Topical Collection: Forest and plantation biodiversity.
Electronic Supplementary Material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Whitworth, A., Pinto, C., Ortiz, J. et al. Flight speed and time of day heavily influence rainforest canopy wildlife counts from drone-mounted thermal camera surveys. Biodivers Conserv 31, 3179–3195 (2022). https://doi.org/10.1007/s10531-022-02483-w
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10531-022-02483-w