
Abstract
In dynamic soil-structure interaction problems, involving the coupling of structure, foundation and soil, the use of a nonlinear macro-element modelling approach may result particularly advantageous not only to consider nonlinear effects and thus avoid the introduction of possible bias in seismic risk assessment analyses, especially when ground motion intensity levels are high, but also to greatly reduce the heavy computational effort required by 3D finite element soil-block models. In this work, a footing macro-element that models the soil nonlinear behaviour at near-field, as well as the far-field dynamic impedance and energy dissipation through radiation damping, is verified against results obtained from the analysis with OpenSees of a 3D nonlinear soil-block model, itself verified through cross-checks and cross-modelling efforts with equivalent-linear analyses in STRATA and nonlinear analyses in DEEPSOIL. Considering two soil profiles of different complexity and two records of different intensity, one of which leads to extensive soil nonlinearity, the soil-block is verified first. Then, the macro-element model, available in SeismoStruct, is verified against the soil-block model in terms of structural response of a single-degree-of-freedom (SDOF) system as well as near-field soil-footing behaviour.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
In the last decades, a large body of literature focused on soil-structure interaction (SSI), which has emerged as a sometimes crucial problem involving the dynamic coupled behaviour of structure, foundation and soil. Amongst the relevant contributions, Stewart et al. (1999a, b) proposed simplified analytical formulations that can be used to predict inertial interaction effects, and also found that in many cases, while kinematic interaction effects on the ground motion at the base of structures may be relatively modest, inertial interaction effects on the structural response to this base motion can be significant. Investigating kinematic interaction and thus variations between foundation-level and free-field ground motions, Kim and Stewart (2003) provided recommendations for modifying free-field ground motions to estimate base slab motions for use in response analyses of buildings with shallow foundations. The role of SSI is not always beneficial in the design of a structure, despite being often considered as such. In fact, seminal works on the subject (e.g., Mylonakis and Gazetas 2000; Gazetas and Mylonakis 2001) pointed out that, in certain seismic and soil environments, an increase in the fundamental period of a moderately flexible structure, due to SSI, may have a detrimental effect on seismic demand.
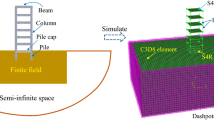
Inertial interaction in presence of nonlinear soil response is frequently simulated through the use of soil-foundation macro-elements, which have been shown to be a reliable tool for SSI analysis (see Sect. 5.1). SSI macro-element models can be particularly useful not only to consider nonlinear effects and thus avoid the introduction (occurring with a weaker modelling effort) of possible bias in seismic risk assessment analyses, especially when ground motion intensity levels are high, but also because such models are much more computationally efficient than 3D finite element (FE) soil-block models. The latter have indeed a computational cost that renders them particularly unfeasible for fragility functions derivation, where hundreds of nonlinear dynamic analyses need to be run (see e.g. Cavalieri et al. 2020). The primary goal of this paper is therefore to explore and hopefully ascertain the reliability of such macro-element models. The macro-element model by Correia and Paolucci (2021), as implemented in SeismoStruct (2021), was verified through comparisons of the structural response, as well as the near-field soil-footing behaviour, of two equivalent single-degree-of-freedom (SDOF) systems, the latter being founded on the macro-element and on a 3D nonlinear soil-block model representing a layered soil, recently developed by the authors (Cavalieri et al. 2021b) in OpenSees (McKenna et al. 2000).
It is known that kinematic and inertial interactions occur simultaneously and should be thus modelled as acting together. Under the soil linearity assumption, it is possible and convenient (both conceptually and computationally) to model SSI through the substructure approach, which allows splitting kinematic and inertial interaction in different sub-steps and considering their combined effects using the principle of superposition (see e.g. Kramer 1996; Mylonakis et al. 2006). However, in order to handle soil nonlinearities, strictly speaking the only viable option is to employ the direct one-step approach, which is able to account simultaneously for inertial and kinematic interaction and whose implementation is possible in a soil-block model.
The current literature includes a number of works that use FE soil-block analyses to account for (linear or nonlinear) SSI. Several of these past works, which are of interest for the current study and are briefly described in the following, aimed at evaluating the effects of SSI on the structural response by comparing different models that encompass soil-structure interaction with the fixed-base case, taken as reference. SSI was modelled through a 2D FE soil-block model by Pitilakis et al. (2014), who carried out Incremental Dynamic Analysis (IDA) to retrieve fragility curves of reinforced concrete (RC) buildings; it was concluded that considering SSI effects may significantly affect the performance of structures founded on soft soils. Karapetrou et al. (2015) and Mitropoulou et al. (2016), using a 2D soil-block model as well, showed the crucial role played by SSI in modifying the expected structural performance of high-rise RC structures. Fathi et al. (2020) used a 3D nonlinear soil-block model to assess the impact of SSI on the out-of-plane behaviour of wall-type masonry buildings, finding that (i) SSI often increases displacement demand and decreases acceleration demand, and (ii) soil nonlinearity increases the period of the system and consequently moves the out-of-plane acceleration response of the structure out of the resonance area. The relevance of considering soil nonlinearity in SSI was pointed out by Bolisetti et al. (2018), with reference to seismic risk of nuclear structures. The outcomes obtained from a nonlinear time-domain SSI analysis using a 3D FE soil-block model in LS-DYNA (LSTC 2013) were compared with those from an equivalent-linear analysis using the SASSI frequency-domain code (Lysmer et al. 1999); it was found that neglecting soil nonlinearity may lead to an unconservative estimation of the superstructure’s response and its seismic risk. As also demonstrated by these works, the 3D nonlinear soil-block modelling approach is thus the most refined option to account for SSI.
The authors already tested the robustness of the developed soil-block model in their earlier work (see Cavalieri et al. 2021b), carrying out a number of cross-checks and a cross-modelling verification using the equivalent-linear solution obtained in STRATA (Kottke and Rathje 2008) as reference. However, in order to attain further reassurance on the accuracy of the developed soil-block model, it was decided in the current work to extend the cross-modelling verification by employing a fully nonlinear soil response modelling tool, namely DEEPSOIL (Hashash et al. 2020), as reference. Such a verification is thus the secondary goal of this work and serves the purpose of lending further confidence to the subsequent macro-element verification.
The manuscript is organised as follows. Section 2 describes the two soil profiles and the two earthquake records that were used for both verification exercises, while Sect. 3 presents the modelling approach adopted for the soil-block. The latter is first verified, by comparison with the results from DEEPSOIL and STRATA, as reported in Sect. 4. Then, the macro-element is verified against the soil-block model in terms of structural response and near-field soil-footing behaviour in Sect. 5, where the 3D numerical model of a SDOF structural system (representative of e.g. a small bridge pier, a small elevated water tank tower, or any other small structure or structural sub-assembly), founded on the soil-block, is also described. Final discussion and conclusions are included in Sect. 6.
2 Soil properties and seismic input
In this study, the dynamic analyses, concerning both the soil-block verification against STRATA and DEEPSOIL and the macro-element verification against the OpenSees model, were carried out with reference to two soil profiles and two records, briefly presented in this section.
2.1 Soil properties
The first soil profile, called BOWW, was extracted from a set of six profiles considered within a recent SSI study by the authors (Cavalieri et al. 2021b).
The BOWW soil profile has a total thickness of 800 m. The shear wave velocity (VS) profile and soil stratigraphy information, as well as a set of geomechanical parameters used to describe the dynamic soil behaviour in terms of the shear modulus reduction and damping curves, were extracted from the Groningen microzonation studies by Kruiver et al. (2017) and Rodriguez-Marek et al. (2017), to which interested readers are referred for details. The shear wave velocity profile is characterised by a time-averaged VS in the upper 30 m, VS,30, that is equal to 174 m/s. Fig. 1 shows the entire VS profile (and a close-up on the upper 30 m), whilst for the main stratigraphy and geotechnical properties interested readers are referred to the report by Mosayk (2020).

Shear wave velocity profile for the BOWW soil profile; a entire profile and b close-up on the upper 30 m
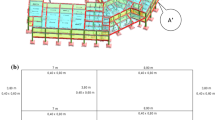
The second soil profile that was considered herein is a simpler “academic profile”, composed of one overconsolidated fine-grained layer, of thickness H = 100 m, with uniform properties, underlain by a rigid bedrock (see Fig. 2). Adopting VS = 150 m/s and a mass density, ρ, of 1.9 ton/m3, results in a maximum shear modulus \(G_{max} = \rho V_{S}^{2}\) ≈ 40 MPa. Then, assuming a ratio of Gmax/su equal to 600, the (constant) undrained shear strength corresponds to su ≈ 70 kPa. It was assumed here that the soil deposit has overconsolidation ratio (OCR) values that decrease with depth, resulting in an approximately constant undrained shear strength with depth. In particular, the constant su implies a strong variation of OCR with depth up to 10–20 m and then a slower variation of OCR at larger depths, which can be the result of layers with different stress histories and composition. Both soil profiles are assumed to have the water table level at the ground surface.

Scheme and basic properties of the academic soil profile
The analytical solution in terms of surface acceleration, naturally valid for the linear case alone, where a viscous damping ratio ξ = 5% was assigned to the soil material damping, can be obtained using the following transfer function between the base motion and the ground surface motion (Kramer 1996):
where ω is the circular frequency. Given an acceleration signal applied at the rigid bedrock, the surface acceleration is readily obtained by computing the Fourier transform of the bedrock input signal (which is thus converted into the frequency domain), multiplying it by the transfer function in Eq. (1) and then converting back the signal to the time domain applying an inverse Fourier transform.
Concerning the nonlinear case, the modulus reduction (G/Gmax) and damping curves were retrieved by using the classical expressions proposed by Darendeli (2001). Because the curves are a function of the confining pressure, the soil deposit was discretised in 50 layers of 2 m each, resulting in 50 pairs of curves (reported in Cavalieri et al. 2021a).
2.2 Seismic input
In site response analyses, the seismic input typically takes the form of an acceleration history applied at the bottom of the soil deposit. Two records were selected herein for the dynamic analyses. The first one, originally labelled “23G461”, was taken from the set of three relatively weak 50 m depth borehole records considered in the study by Cavalieri et al. (2021b), and features a Peak Ground Acceleration (PGA) of 0.2 m/s2. This ground motion was caused by induced seismicity in the Groningen gas field, and in particular by the 27 May 2017 ML 2.6 Slochteren earthquake. It was recorded at the G090 station (Dost et al. 2017; Ntinalexis et al. 2019), with an epicentral distance of 1.9 km and a VS,30 value of 380 m/s. A low-cut Butterworth filter at a frequency of 0.56 Hz was applied to this record (Edwards and Ntinalexis 2021). Figure 3 displays the acceleration histories and response spectra of the two horizontal components, namely H1 and H2, of this record, which will be henceforth referred to as “Accel Low”.

Horizontal components of record “Accel Low”, in terms of acceleration a histories and b response spectra
The second record that was selected belongs to the Central Italy earthquake sequence of 2016. It was extracted from the ITalian ACcelerometric Archive (ITACA) database (D’Amico et al. 2020) among the records of the first main event of the sequence (24 August 2016). With a magnitude ML 6.0, an epicentral distance of 33 km and a PGA equal to 2.42 m/s2 for the East–West horizontal component, it is the strongest one among the records available for that event on soil type A. The latter soil class, which indicates rock or very stiff soil with VS higher than 800 m/s according to EC8 (CEN 2004a), was inferred from geology. A band-pass second-order Butterworth filter between 0.05 and 40 Hz was applied to this record, which was registered at the recording station with code name “FEMA” and will hereafter be referred to as “Accel High”. Figure 4 displays the acceleration history and response spectrum of the selected East–West component of record “Accel High”. This component was used in both horizontal directions within the 3D soil-block analyses for the macro-element verification (see Sect. 5); however, this choice did not influence the results, since the response in only one horizontal direction is of interest here, as will be further discussed at the end of Sect. 3.

East–West horizontal component of record “Accel High” (Central Italy), in terms of acceleration a history and b response spectrum
The definition of the seismic input to be introduced at the base of the DEEPSOIL and the OpenSees models (see Sects. 4.2 and 5.4) required the undertaking of a preparatory step, different for each one of the two soil profiles.
For BOWW, both records were applied. A 50 m deep soil-column was considered for the verification of the OpenSees model (soil-block reduced to a soil-column) against DEEPSOIL, whilst the verification of the nonlinear footing macro-element against the soil-block model was carried out for a smaller depth, namely 30 m, to reduce the computational burden required by the soil-block analyses and thus make the comparison computationally feasible (see Cavalieri et al. 2021b, for more details on the choice of these two depths). The acceleration histories at these two depths, for both records, were obtained by convolution using STRATA. Concerning the “Accel Low” accelerogram, which was recorded at a 50 m deep borehole station, both components were introduced in the STRATA model as “within” motions at a 50 m depth, whereas the “Accel High” record was applied at the rigid bedrock of the STRATA model, at an 800 m depth, as a rock outcrop motion. Then, for both records, the upward propagating motions that serve as input to the OpenSees and DEEPSOIL models were extracted at 50 m and 30 m depths as outcrop motions.
On the other hand, for the academic soil profile it was decided to only apply the “Accel High” signal, recorded on rock outcrop, since record “Accel Low” was recorded in a borehole at a 50 m depth in a Groningen soil profile (i.e. it is a “within” motion), which has markedly different properties with respect to the simple academic profile with uniform properties: in other words, it would be unrealistic to apply the “Accel Low” record as a “within” motion at a 50 m depth in the academic profile, as done for the BOWW profile. The entire academic profile, namely a 100 m deep soil-column, was considered for the verification of the OpenSees model against DEEPSOIL, whilst for the verification of the nonlinear footing macro-element against the soil-block model the same reduced depth of 30 m was adopted, as done for the first profile. The “Accel High” record was applied at the bedrock of the DEEPSOIL model, at a 100 m depth, and the input signal for the soil-block model at a 30 m depth was then obtained from the convolution process.
3 3D nonlinear numerical model of layered soil
The 3D numerical model of layered soil underlain by an elastic or rigid half-space and developed by Cavalieri et al. (2021b), was implemented in OpenSees (McKenna et al. 2000) and used herein to represent the two soil profiles briefly introduced in Sect. 2.1. The base nodes of the soil-block model are fixed vertically. To ensure equal horizontal displacements, equalDOF boundary conditions are applied in the two horizontal directions (global x and z) to all nodes belonging to the soil-block’s edges and base. Eight-node SSPbrick elements compose the soil-block model. The soil layers can be assigned linear or nonlinear materials. In the nonlinear case, the elastic–plastic PressureIndependMultiYield material is adopted and shear modulus degradation curves can be assigned to all soil layers, considering their initial confinement pressure. The Poisson's ratio was set to 0.45, considering undrained conditions (a 0.5 value was not adopted to avoid difficulties with the numerical stability of the analysis).
In order to accurately reproduce the propagation of the shear waves below a frequency of interest, the soil-block mesh size should be such that at least eight elements are included within the minimum wavelength, λ, of the input seismic excitation (Kuhlemeyer and Lysmer 1973); to this aim, a horizontal mesh size of 1 m was chosen in both x- and z-directions (i.e. 1 × 1 m2 square elements) for both soil profiles (see Cavalieri et al. 2021b, for additional details). Along the vertical y-direction, layers thicker than 1 m were subdivided into two or more sublayers, so that the largest sublayer thickness is 1 m. The accuracy and efficiency of these mesh settings were checked by model verification, comparing the output results with those obtained with an alternative modelling (see Cavalieri et al. 2021b), and are further checked in this work, by comparison with the results obtained in DEEPSOIL.
In the developed soil-block model, in order to attenuate numerical noise possibly present in the analyses, a Rayleigh damping formulation was adopted, requiring the selection of values for the damping ratio and two modal frequencies. These values were assigned on a case-by-case basis, as will be detailed in the remainder of the manuscript. For all cases, the modal frequencies were set to the first (fundamental) frequency of the deposit and five times that frequency. An estimation of the fundamental period, T1, was retrieved by the common expression relating the total thickness, H, of an equivalent uniform soil deposit overlying a rigid bedrock, and the average shear wave velocity, VS,avg. The latter is commonly obtained from the shear wave velocity values of the N layers within H, VS,i, and their thicknesses, di (Vijayendra et al. 2015):
In order to reproduce the finite rigidity of the underlying elastic half-space, a compliant base with a quiet (absorbing) boundary was used at the base of the soil-block mesh. In particular, two Lysmer and Kuhlemeyer (1969) viscous dashpots were attached independently at the base of the soil-block in the global x- and z-directions, thus introducing radiation damping. The OpenSees viscous uniaxial material was assigned to the zeroLength elements representing the dashpots. Following the method of Joyner and Chen (1975), the dashpot coefficient, cb, is defined as the product of the mass density, ρb, and shear wave velocity, VS,b, of the underlying elastic layer, and the soil-block base area, A.
Earthquake excitation is input to the system as two force histories, Fx(t) and Fz(t), in the two horizontal directions, applied at the dashpot free nodes and proportional through the dashpot constant to the two velocity time series, vx(t) and vz(t), at the model base.
It is important to note that the analyst has also the option to consider a rigid bedrock at the base of the soil deposit model. To this aim, theoretically it is only needed to assign a large value, say 1000 m/s, to the shear wave velocity of the half-space, VS,b, while keeping the same formulation described above for seismic input application. Imposing a rigid bedrock actually means that there is no interaction between the half-space and the upper layers, and the response motion at the half-space depth is thus assigned and equal to the input motion, with radiation damping not being allowed. Therefore, in order to gain further reassurance on this aspect, the input displacement history at a 50 m depth, obtained through double integration of the “Accel High” input acceleration in the x-direction on the BOWW profile, was compared with the displacement response, along the same horizontal direction, of a 50 m deep soil-column (i.e. with a 50 × 1 × 1 m3 mesh). The comparison was made with two values of VS,b, namely 335 m/s (i.e. the actual value for BOWW) and 1000 m/s. It was confirmed that in the former case the two displacement signals differ, although not significantly (owing to the properties of the case-study at hand), while in the latter case they are essentially coincident, as expected.
For the soil-block verification against DEEPSOIL results (see Sect. 4), only the force history along the x-direction was applied at the base, consistently with the framework of site response analysis programs, and because the interest is obviously in the horizontal response of the deposit, regardless of the direction. On the other hand, for the macro-element verification against the soil-block, a larger soil-block size was considered and both force histories were applied at the base, thus carrying out full three-dimensional analyses. However, given the symmetric (square) properties of both soil-block and structure (for a description of the latter see Sect. 5.3), all plots included in Sect. 5 are related to the same horizontal direction, namely x-direction, similarly to what is done in Sect. 4.
4 Verification of the soil-block 3D numerical model
The developed soil-block 3D numerical model, implemented in OpenSees, is verified herein by comparing its results, in terms of surface acceleration and acceleration profile along the depth, with those obtained in DEEPSOIL, a software tool that has been shown to provide reliable nonlinear soil response estimates. In this respect, Stewart et al. (2008) and Stewart and Kwok (2008) showed that results from nonlinear analyses using DEEPSOIL are in good agreement with those obtained from other codes, such as DMOD_2 (Matasovic 2006), TESS (Pyke 2000), and SUMDES (Li et al. 1992). Similarly, Bolisetti et al. (2014) found that DEEPSOIL and LS-DYNA provide close nonlinear predictions of surface accelerations, despite employing different hysteresis rules, whilst the frequency-domain equivalent linear response obtained from SHAKE2000 (Schnabel et al. 2012) diverges from the nonlinear one for moderate to high shear strains.
For the BOWW profile, comparison with the equivalent linear solution from STRATA is also included for reference, whilst the analytical solution (in the linear case), as described in Sect. 2.1, is added to the comparison for the academic profile.
4.1 DEEPSOIL main features
DEEPSOIL is a one-dimensional site response analysis program developed at the University of Illinois at Urbana-Champaign. The analysis can be linear (L, both in time and frequency domain), equivalent linear (EL, in frequency domain) or nonlinear (NL, in time domain). When the analysis is nonlinear, the user has the option to also carry out automatically a complementary equivalent linear analysis: it is always recommended to compare the results from the two analyses. For the equivalent linear and nonlinear analyses, it is possible to select a nonlinear soil material among three choices, namely the General Quadratic/Hyperbolic model (GQ/H) (Groholski et al. 2016), the pressure-dependent Modified Kondner Zelasko model (MKZ) (Matasovic and Vucetic 1993), and the material with a hyperbolic backbone curve proposed by Yee et al. (2013). For all these choices of soil material, two hysteretic unloading/reloading formulations can be selected, namely the Masing (1926) and non-Masing (Numanoglu et al. 2018) rules. Therefore, in summary, three types of material (GQ/H, MKZ, Yee et al.) and both types of hysteretic unloading/reloading formulation (Masing and non-Masing rules) were considered in this work, for a total of six nonlinear combinations.
Contrary to the input format within other site response analysis programs such as e.g. STRATA, in DEEPSOIL the seismic signal can be input as an acceleration history at the half-space depth only, and with no possibility to indicate if the input motion is “outcrop” or “within”. It is only possible to choose whether the half-space has to be considered as rigid or elastic: in the latter case, the shear wave velocity, unit weight and damping ratio (not used in time-domain analyses) must be input.
For time-domain analyses, it is possible to introduce numerical damping, of the viscous type. Among the available options, there are three types of frequency-dependent Rayleigh damping formulations in DEEPSOIL, requiring one mode/frequency (i.e. simplified Rayleigh damping), two modes/frequencies (full Rayleigh damping), and four modes/frequencies (extended Rayleigh damping), respectively. When the full Rayleigh damping is selected, it is possible to obtain the two control frequencies recommended by the program, which are the fundamental frequency of the soil deposit and five times that frequency. A further option for damping, which is recommended by the program’s developers and was thus selected in all analyses in this work, is the frequency-independent formulation (Phillips and Hashash 2009); the latter does not require specification of modes or frequencies and removes many of the limitations of Rayleigh damping, without heavily increasing the required computational time. Regardless of the formulation, whether frequency-dependent or frequency-independent, the value of the damping ratio cannot be input for small-strain damping.
4.2 Verification against soil-column analysis in DEEPSOIL
4.2.1 BOWW profile
Initially, the BOWW profile was modelled in DEEPSOIL up to a 50 m depth, and a nonlinear time-domain analysis plus a complementary equivalent linear frequency-domain analysis were undertaken, employing for damping the (recommended) frequency-independent formulation. In the first case, record “Accel Low” was applied at the base of the deposit and the surface acceleration response history, for all six combinations of material and hysteretic unloading/reloading formulation, was compared with the one obtained from the 50 × 1 × 1 m3 soil-column in OpenSees. Concerning the Rayleigh damping settings for the soil model in OpenSees, the two control frequencies recommended by DEEPSOIL were adopted (see Sect. 4.1), namely 1.02 Hz and 5.10 Hz; since the damping ratio for numerical viscous damping cannot be input in DEEPSOIL, it was decided to iteratively change the damping ratio value in OpenSees up until the attainment of the best match with the results from DEEPSOIL, which was achieved for the reasonably low value of 1.4%.
The comparison results in terms of surface acceleration histories (limited to the initial four seconds of dynamic analysis to cater for a more immediate inspection of the match) and response spectra, as well as the maximum acceleration profile along the depth, are shown in Fig. 5 with reference to the DEEPSOIL combination that leads to the best agreement with OpenSees, namely GQ/H material and Masing rules. As can be noted from Fig. 5, which also displays the equivalent linear solution from STRATA for reference, the obtained match is very satisfactory, especially considering the markedly different modelling approaches adopted in the three programs, thus demonstrating the robustness of the developed soil-block model. In Fig. 5a it is evident how the two equivalent linear solutions, provided by DEEPSOIL and STRATA, slightly overestimate the surface acceleration at the highest peaks, and thus PGA, as also gathered from Fig. 5b and c, indicating that the soil experiences nonlinearity. The two equivalent linear solutions are hence not able to capture the light nonlinearity arising from the weak excitation.

Comparison between results obtained in OpenSees, DEEPSOIL (NL + EL solutions) and STRATA for a 50 m deep soil-column, for BOWW soil profile and record “Accel Low”, in terms of surface acceleration a histories and b response spectra, as well as c the maximum acceleration profile along the depth
From a more comprehensive comparison, not shown here, between the OpenSees results and those obtained in DEEPSOIL considering all six nonlinear combinations, it is apparent that the soil-column model in OpenSees is able to provide a very good agreement with all DEEPSOIL solutions, which are essentially coincident for this weak record.
An excellent comparison (not shown here due to space constraints) was also found between the linear solutions in OpenSees and DEEPSOIL (time domain), again in terms of surface acceleration histories and response spectra, as well as the acceleration profile along the depth.
The very same comparison steps undertaken for record “Accel Low” were repeated for the “Accel High” record, which was applied at the base of the 50 m deep deposit in both OpenSees and DEEPSOIL. For the analyses with this second record, the damping settings were left unchanged in both programs, and again the surface acceleration response history obtained in DEEPSOIL, for all six combinations of material and hysteretic unloading/reloading formulation, was compared with the one obtained from the 50 × 1 × 1 m3 soil-column in OpenSees.
The comparison results in terms of surface acceleration histories and response spectra, as well as the maximum acceleration profile along the depth, are shown in Fig. 6 with reference to the DEEPSOIL combination that leads to the best agreement with OpenSees, namely GQ/H material and Masing rules. As can be noted from Fig. 6, which also displays the equivalent linear solution from STRATA for reference, the obtained match is less satisfactory than in the case of record “Accel Low”. However, the OpenSees solution still shows a good agreement with the nonlinear solution in DEEPSOIL. It is important to note that the reduced reliability of the match, with respect to the case of record “Accel Low”, is somehow expected, given the stronger shaking intensity and thus the higher degree of nonlinearity experienced by the soil layers. In this condition, it is indeed expected that the differences between the two nonlinear modelling approaches become more evident. The effect of nonlinearity is clearly visible in Fig. 6a, where the two equivalent linear solutions, provided by DEEPSOIL and STRATA and which are coincident, highly overestimate the surface acceleration not only at the highest peaks: this is in line with the findings of Kim et al. (2016) and Bolisetti et al. (2014), and indicates that soil experiences severe nonlinearity.

Comparison between results obtained in OpenSees, DEEPSOIL (NL + EL solutions) and STRATA for a 50 m deep soil-column, for BOWW soil profile and record “Accel High”, in terms of surface acceleration a histories and b response spectra, as well as c the maximum acceleration profile along the depth
Also for record “Accel High”, the OpenSees results were compared with those obtained in DEEPSOIL considering all six nonlinear combinations, observing that the DEEPSOIL solutions are not coincident for this stronger record: the OpenSees response does not closely match any of the six solutions, as expected, but it stands in between them, as a sort of an average/median solution. An almost perfect comparison (not shown here due to space constraints) was then found between the linear solutions in OpenSees and DEEPSOIL (time domain) also for this stronger record. Therefore, it is possible to conclude that the verification test for the OpenSees model is again passed successfully.
4.2.2 Academic profile
The entire academic profile, up to a 100 m depth and with rigid base, was modelled in both DEEPSOIL and OpenSees; in the latter program, the soil-block was thus reduced to a 100 × 1 × 1 m3 soil-column. As mentioned in Sect. 2.1, the soil-column was discretised in 50 layers, each having a depth of 2 m and the two associated modulus reduction and damping curves. It was decided to first compare the linear solutions provided by the two programs with the analytical solution, in terms of surface acceleration histories and response spectra, for the only record considered for this profile, namely “Accel High”. The DEEPSOIL solution was produced not only in the time domain but also in the frequency domain, to enrich the comparison.
Regarding the viscous damping settings, the frequency-independent formulation was adopted in DEEPSOIL, whilst for OpenSees a Rayleigh damping at the two control frequencies equal to the first frequency of the deposit and five times that frequency, namely 0.375 Hz and 1.875 Hz, was used; the damping ratio was iteratively changed up until the attainment of the best matching with the results from DEEPSOIL and the analytical solution, which was achieved for the value of 3%. The comparison results in terms of surface acceleration histories and response spectra, as well as the maximum acceleration profile along the depth, are shown in Fig. 7. As can be noted from Fig. 7a and b, the frequency-domain results of DEEPSOIL are perfectly superimposed to the analytical ones, as expected, thus serving as a reference in Fig. 7c. The obtained match is very satisfactory, being the results provided by OpenSees indeed very close to the reference ones. The small divergences that can be noted with DEEPSOIL are most likely due to the viscous damping formulations, which are quite different in the two programs.

Comparison of linear solution results obtained in OpenSees and DEEPSOIL frequency domain (L-FD) and time domain (L-TD), against the analytical solution, for a 100 m deep soil-column, with academic soil profile and record “Accel High”, in terms of surface acceleration a histories and b response spectra, as well as c the maximum acceleration profile along the depth (analytical solution not computed in this case)
In order to define the frequency range of accuracy of the OpenSees linear numerical solution, the numerical/analytical comparison is also shown in Fig. 8 in terms of Fourier Amplitude Spectrum (FAS) of the acceleration surface signals and ratio of numerical/analytical Fourier spectra (i.e. transfer functions). The analytical Fourier spectrum (Fig. 8a), which indicates how energy in the signal is distributed over the various frequency components, highlights that for frequencies lower than around 0.2 Hz and higher than around 5 Hz, the analytical acceleration signal has relatively low energy, whereas from both subplots it is evident that within the significant portion of the signal (i.e. between 0.2 and 5 Hz) a good match is obtained between the results provided by OpenSees and the analytical ones. It should also be noted that the divergences appearing at lower and higher frequencies are, again, probably due to the viscous damping Rayleigh formulation in OpenSees, which, as it is well known, involves the application of a damping ratio higher than the target one (in this case 3%) for both lower and higher frequencies. The DEEPSOIL results appear to be closer to the analytical ones also due to the adopted frequency-independent formulation for viscous damping.

Comparison of linear solution results obtained in OpenSees and DEEPSOIL frequency domain (L-FD) and time domain (L-TD), against the analytical solution, for a 100 m deep soil-column, with academic soil profile and record “Accel High”, in terms of a FAS of surface acceleration, and b transfer functions (considering the analytical solution as reference)
Subsequently, the comparison was undertaken in the nonlinear field. In DEEPSOIL, a nonlinear time-domain analysis plus a complementary equivalent linear frequency-domain analysis were carried out, for all six combinations of material and hysteretic unloading/reloading formulation, employing for damping the usual frequency-independent formulation. On the other hand, for Rayleigh damping in OpenSees, the same two control frequencies of 0.375 Hz and 1.875 Hz were used, but reducing the damping ratio to 0.3%. The comparison results are shown in Fig. 9 with reference to the DEEPSOIL combination that leads to the best agreement with OpenSees, namely GQ/H material and Masing rules. The obtained match is quite good, also given the high degree of nonlinearity experienced by the soil layers for this strong record, a condition in which the differences between the two nonlinear modelling approaches are expected to be more pronounced. Once again, it is evident how the equivalent linear solution provided by DEEPSOIL does overestimate the acceleration, especially at the surface, confirming that, also for this profile, soil experiences nonlinearity in the near-field.

Comparison between results obtained in OpenSees and DEEPSOIL (NL + EL solutions) for a 100 m deep soil-column, with academic soil profile and record “Accel High”, in terms of surface acceleration a histories and b response spectra, as well as c the maximum acceleration profile along the depth
Also for the academic profile, the OpenSees results were compared with those obtained in DEEPSOIL considering all six nonlinear combinations. Noting again that the DEEPSOIL solutions are not superimposed, the OpenSees response does not match any of the six solutions, as expected, but is sufficiently close to them.
5 Verification of the nonlinear footing macro-element
A footing macro-element model, as implemented in SeismoStruct, is verified herein by comparison with the results from the soil-block analyses in OpenSees.
5.1 Overview of the employed nonlinear macro-element
Soil-foundation macro-elements are frequently adopted in SSI analysis as they have been previously shown to be a cost-effective and reliable tool for such a type of analysis. They indeed suitably represent both the near-field nonlinear soil behaviour and the far-field linear dynamic characteristics, as well as the interaction with the structure’s seismic response (Correia 2011, 2013). Therefore, all aspects of elastic and inelastic behaviour of the soil-foundation system are included into one single element at the centre of the foundation.
The footing macro-element model considered in this work is the one proposed by Correia and Paolucci (2021), building upon the formulations of the models by Chatzigogos et al. (2011) and by Figini et al. (2012), and incorporating several improvements, among which the extension to three-dimensional loading cases and an enhanced uplift model; the latter is based on a nonlinear elastic-uplift response that includes a phenomenological model for the progressive degradation of the contact at the soil/footing interface. A modified bounding surface plasticity model, able to represent the ultimate plastic flow conditions and the transition between the initial elastic and inelastic responses, is introduced.
The main parameters of the macro-element correspond to: (i) the footing dimensions; (ii) the six initial elastic frequency-independent values of the diagonal impedance matrix, representing the far-field response; (iii) the six bearing capacity values, which can be derived from classical formulas and represent the near-field failure conditions. The macro-element is able to gradually evolve from the initial elastic response to the plastic flow at failure through the bounding surface plasticity model, encompassing the uplift and contact degradation phenomena. The employed macro-element model also includes five calibration, model-specific, parameters, whose optimal values were established within the parametric study by Pianese (2018).
5.2 Properties of the footing macro-element and SDOF structure
The developed model for nonlinear dynamic analyses, as introduced in SeismoStruct, is shown in Fig. 10. It is composed of a linear structural SDOF and a footing macro-element. The SDOF structural mass, stiffness and damping coefficient are indicated with ms, ks and cs, respectively. The superstructure mass is placed at the building’s centroid height, Heff, and is connected to the foundation node by a rigid link, so as to capture the inertial interaction between the superstructure and the foundation (with mass mf); this allows properly considering the rigid displacement of the superstructure mass due to the foundation rotation θf, equal to Heff·θf. To account for the inertial components in the presence of the structure (structure and foundation masses and their interaction), the seismic acceleration, a(t), is input to the system as two inertia force histories, fs(t) and ff(t), applied to the superstructure mass and the foundation mass, respectively. The three springs and dashpots represented in the 2D view of Fig. 10, whose constants correspond to the stiffness and damping in the vertical direction (kV, cV), horizontal x-direction (kHx, cHx) and rotational direction around the z-axis (kMz, cMz), represent the macro-element elastic behaviour in the far-field. For simplicity, the remaining three springs and dashpots are not visualised in the 2D scheme, but belong to the macro-element formulation and play an active role in the dynamic analyses, since the macro-element behaviour is fully coupled in the six directions.

The adopted system with footing macro-element for shallow foundations
As mentioned above, the macro-element requires as input, for the far-field response, the constant initial elastic stiffness and radiation damping coefficients for the six degrees of freedom. Such foundation impedances were determined using the relationships proposed by Gazetas (1991) for rectangular foundations on homogeneous half-space, with reference only to the three directions of interest for the analyses (i.e. vertical, horizontal x-direction and rotational direction around the z-axis). On the other hand, for the near-field behaviour, the vertical, horizontal and rotational components of the foundation bearing capacity were evaluated under undrained conditions, considering the available information on undrained shear strength and using the formulation proposed by EC7 (CEN 2004b). Since the dynamic analyses were carried out under undrained conditions, the scallop shape was adopted for the bounding surface (Correia and Paolucci 2021). All the expressions employed are reported in Cavalieri et al. (2020). It is important to note that such expressions rely on several assumptions that may not apply to the soil profiles at hand. For instance, the expressions by Gazetas (1991) are valid in the case of homogeneous half-space, as already said, but the academic profile may not be considered a half-space, due to the presence of bedrock at a relatively shallow depth (100 m). Nevertheless, using the parameter values obtained from such expressions led to a satisfactory match of the results between SeismoStruct and OpenSees (soil-block analyses) in terms of horizontal displacements of the structural SDOF, and this is an indication of the robustness of the adopted macro-element model. However, in order to obtain a good agreement also in terms of near-field soil-footing behaviour (see Sect. 5.4), the macro-elements for the two soil profiles considered herein were calibrated against the soil-block results, keeping the proportions between the parameter values deriving from the above-mentioned expressions.
Tables 1 and 2 report the adopted calibrated values for the parameters of the footing macro-elements, in terms of initial stiffness, foundation capacity (vertical, Nmax, horizontal, Hmax,x, and rotational, Mmax,z, components) and radiation damping equivalent dashpot coefficients, only along the directions of interest for the analyses, as well as the five model-specific parameters, for the BOWW and academic soil profiles, respectively. It can be noted that the macro-element parameter values in Tables 1 and 2 are quite similar. In selecting the properties of the academic soil profile, it was indeed intended that such properties would lead to macro-element parameter values similar to those of the BOWW profile, so that the analytical verification carried out using the academic soil profile (see Sect. 4.2.2) could be of relevance and pertinence also to the real soil profile case (i.e. BOWW).
The structural SDOF that was considered herein is an academic example representing e.g. a small bridge pier, a small elevated water tank tower, or any other small structure or structural sub-assembly. It features a height of 4 m, a rigid footing foundation of 2 × 2 m2, and structural and foundation masses equal to 5 tonnes and 0.8 tonnes, respectively. Given the purpose of this application, which is verifying the macro-element model, it was decided to assign linear properties to the structural SDOF, so as to prevent possible differences between nonlinear material models in SeismoStruct and OpenSees to influence the comparison. The elastic stiffness along the horizontal x-direction, the only one of interest herein, was set equal to 103 kN/m. Rayleigh damping was assigned to the SDOF; the damping ratio was initially set to 5% (but then changed to 3%, see discussion in Sect. 5.4), whilst the two control frequencies were fixed to the first frequency of the SDOF and five times that frequency, namely 2.25 Hz (fixed-base SDOF period equal to 0.444 s) and 11.25 Hz.
5.3 3D numerical model of the soil-block with a SDOF structure
The structural SDOF model developed in OpenSees is comprised of a superstructure with linear behaviour that is fixed to a footing modelled as an elastic rigid slab. The latter represents the real foundation and is also used to simulate the connection between the superstructure and the soil-block model, consistently with the SeismoStruct model, composed of a structural SDOF rigidly connected to a footing macro-element (see Sect. 5.2). The slab is modelled with shell elements of type ShellMITC4, which use a bilinear isoparametric formulation combined with a modified shear interpolation to improve thin-plate bending performance. Within this element, an elastic isotropic section type suitable for plate and shell analysis is used, namely ElasticMembranePlateSection; for the slab to be rigid, the section is characterised by a Young’s modulus of 1010 kPa.
The connection of the footing slab to the soil-block aims to allow and represent the footing rocking and uplift, whilst shear failure and sliding is automatically captured through the response of the upper layers of the soil-block model. Because the soil-block nodes, belonging to SSPbrick elements, only have three degrees of freedom (DOFs), it is not possible to introduce zeroLength elements between such nodes and the structural shell nodes of the slab, which are created with six DOFs. For this reason, “copies” of the shell nodes are created and linked to the corresponding (i.e. sharing the same position) soil nodes by equalDOF constraints in all three directions, as well as to the “original” shell nodes by zeroLength elements, characterised by the behaviour described below in the six directions. Since sliding is captured in a different way, as stated above, a high-stiffness linear elastic behaviour is imposed in the global x- and z-directions, whilst to allow rocking a low-stiffness linear elastic behaviour is assigned along the three rotational directions (free rotation around the vertical axis is prevented by the constrained horizontal displacements). Then, to capture uplift, the Elastic-Perfectly Plastic Gap material is used in the vertical direction, with gap size equal to zero, very large stiffness, negative yield force (with very high value) that models a compression (i.e. no-tension) gap, hardening ratio equal to 1 and no damage accumulation, meaning that the gap material recentres on load reversal.
After introducing the soil-footing connection, the superstructure is modelled by first creating a (foundation) node sharing the position with the slab centroid, and fixed to it by equalDOF constraints in all six directions. Then, a second node is created above the slab at the building’s centroid height, Heff. This node is connected to the foundation node by a rigid elastic beam element, of type elasticBeamColumn. Finally, a third node is added, sharing the position with the second one, and a structural zeroLength element in the global x- and z-directions can be thus introduced between them. The four remaining free DOFs of the third node are constrained by equalDOF. The structural mass is assigned to the third node in the two horizontal directions, whereas the foundation mass is taken into account by assigning the proper mass density to the slab shell elements. To complete the model, gravity loads of the foundation and the structure are applied to the first and third nodes, respectively. By employing the described modelling approach, the inertial interaction effects between the superstructure and the foundation are captured, with the rigid displacement of the superstructure mass due to the foundation rotation being considered within the nonlinear dynamic analyses. The soil-block plus SDOF model developed in OpenSees, able to capture sliding, rocking and uplift of the slab, as well as inertial interaction effects, is fully consistent with the macro-element plus SDOF system modelled in SeismoStruct (see Sect. 5.2).
The same lightweight structural SDOF modelled in the system with macro-element was introduced on top of the soil-block, as shown in Fig. 11 with reference to the BOWW profile and soil-block size of 30 × 10 × 10 m3. Consistently with the structural SDOF modelling in SeismoStruct, in OpenSees the SDOF was modelled using a linear elastic zeroLength element in the global x- and z-directions, with a 103 kN/m stiffness. Rayleigh damping was adopted as done in SeismoStruct, with the same damping ratio (i.e. 5%) and control frequencies (namely 2.25 Hz and 11.25 Hz), and using the region command to make sure to apply this damping only to the structural nodes and elements (Rayleigh damping for soil has different settings, depending on the soil profile).

Soil-block, of size 30 × 10 × 10 m3, with BOWW profile and SDOF model on top, with indication of the shear wave velocity profile
A soil-block size of 30 × 10 × 10 m3 was used in all analyses carried out for the macro-element verification, in order to reduce the associated computational effort and also in the light of a comparison made with the results related to a soil-block size of 30 × 20 × 20 m3, in terms of surface acceleration. The latter soil-block was taken as reference, given that its plan size (i.e. 20 × 20 m2) is deemed to be sufficiently larger than the footprint of the SDOF’s slab (i.e. 2 × 2 m2), in a way that the rise of unwanted (non-physical) SSI effects is avoided. The acceleration histories were compared with reference to the BOWW soil profile and record “Accel High”, and in two positions on the surface, one of which is in the free-field and the other one is under the centroid of the structure’s footprint. For each of the positions, two corresponding points were considered in the two soil-blocks (of plan size 20 × 20 m2 and 10 × 10 m2), sharing the same relative distance from the SDOF. As shown in Fig. 12, the two acceleration histories are superimposed for both positions, thus reassuring on the capability of the 30 × 10 × 10 m3 soil-block to well reproduce the propagation of shear waves in the presence of this lightweight structure, and justifying the use of the smaller plan size for these soil-block analyses. The squares in the lower right corner of both subplots of Fig. 12 are 20 × 20 m2 in plan, but the internal border of the soil-block surface with 10 × 10 m2 plan size is also displayed for reference; the footprint of the SDOF’s slab is indicated in green. Further insight from the performed comparison is provided by noting that the acceleration signals obtained in the two positions are essentially coincident: this confirms that no relevant SSI effects are developed by lightweight structures, as also found by Cavalieri et al. (2021b).

Comparison of surface acceleration signals obtained with two soil-block models of size 30 × 20 × 20 m3 and 30 × 10 × 10 m3, in two different positions (red dots) on the soil-block surface, for BOWW soil profile and record “Accel High”
5.4 Verification against soil-block analyses in OpenSees
In this section, the SeismoStruct results are compared with those obtained from soil-block analyses in OpenSees, taken as reference, in terms of structural displacement history along the x-direction, as well as quantities related to the near-field soil-footing behaviour, for both soil profiles and records. It is important to highlight an aspect related to the seismic input adopted for the macro-element in SeismoStruct. Having a finite element model available, it would have been possible to consider the free-field surface acceleration signal from the soil-block analyses as input for the macro-element, so as to render the comparison fairer and less affected by differences in the input between the two models. However, keeping in mind that in practical applications soil-block FE models are seldomly available and that macro-elements are indeed used in place of such FE models, in order to emulate such conditions it was decided herein to discard such an availability, and to take instead the free-field surface acceleration signal from the DEEPSOIL analyses presented in the first part of this manuscript (see Sect. 4.2). Naturally, the results from the DEEPSOIL combination that leads to the best agreement with OpenSees, namely GQ/H material and Masing rules, were considered herein. Despite the substantially good match obtained earlier between surface acceleration signals from OpenSees and DEEPSOIL, it should be noted that in this case the discrepancies between the two signals may become more pronounced, owing mainly to the modified size of the OpenSees model, which is now a 30 × 10 × 10 m3 soil-block and not a 50 m deep soil-column as in DEEPSOIL. Such discrepancies, expected particularly for the stronger record (i.e. “Accel High”), as will be shown in the next sections, inevitably decrease the quality of the match between the two programs in terms of structural displacement, but do not prevent the successful verification of the macro-element model. For the sake of completeness, for both soil profiles and records, it was also checked that using the surface acceleration signal from the soil-block analyses in free-field conditions as input for the macro-element, instead of the signal from DEEPSOIL, leads to an improvement of the already satisfactory match of the compared quantities.
In Sects. 5.2 and 5.3 the damping formulation adopted for the structural system in both SeismoStruct and OpenSees has been described. Although the damping settings for the SDOF are the same in the two programs, it should be noted that the numerical viscous (Rayleigh) damping that is present in the soil-block is instead missing in the SeismoStruct model. Further, radiation damping produced by the macro-element dashpots may be different from that produced by the absorbing boundary in OpenSees. Hysteretic damping in the two models may be different as well. Since the two models are quite different in general terms (not only for damping) and the soil-block serves as the reference for this part of the study, it was decided to calibrate the Rayleigh damping in SeismoStruct so as to obtain the best match with OpenSees in terms of structural displacement: only the damping ratio was slightly modified from 5% to 3%, whilst the two control frequencies remained the same (namely 2.25 Hz and 11.25 Hz).
Finally, it is noted that several additional tweaks to both models were analysed (in SeismoStruct and OpenSees), including a refinement of the mesh discretisation in the near-field in the soil-block model, to explore the possibility of obtaining even better agreements. However, all such model adjustments led to basically unchanged results, which are therefore not reported herein.
5.4.1 BOWW profile
A damping ratio of 1.4% was selected for the soil, as done for the soil-column case (see Sect. 4.2.1), whilst the two control frequencies were set to the first frequency of the deposit and five times that frequency, namely 1.43 Hz and 7.15 Hz.
The comparison of structural displacements in the global x-direction, obtained in OpenSees and SeismoStruct for the BOWW soil profile and record “Accel Low”, is shown in terms of histories and FAS in Fig. 13a and b, respectively. The match is very satisfactory, also as a result of the almost perfect agreement of the seismic inputs for the SDOF in the two programs (see Fig. 14), namely the free-field surface acceleration histories from the soil-block analysis and from DEEPSOIL (considering a 50 m deep soil-column), the latter being input to the macro-element in SeismoStruct. From Fig. 13b it can be observed that, besides a peak at the first period of the macro-element plus SDOF system, which is roughly equal to the fixed-base SDOF period of 0.444 s, two other peaks arise due to the ground motion and soil-block response which, as shown in Fig. 5, presents important local amplification around 0.33 s and 0.75 s. Given the almost linear response in this case, those two peaks have important contributions to the overall structural response of the SDOF.

Comparison of structural displacements from OpenSees and SeismoStruct, for BOWW soil profile and record “Accel Low”, in terms of a histories and b FAS, with the free-field surface acceleration signal from DEEPSOIL applied to the macro-element in SeismoStruct

Comparison of free-field surface acceleration signals obtained from the soil-block model in OpenSees and from DEEPSOIL (input for the macro-element, ME, in SeismoStruct), for BOWW soil profile and record “Accel Low”
It was also checked that using the surface acceleration history from the soil-block analysis in free-field conditions (i.e. without the structure on top) as input for the macro-element, instead of the signal from DEEPSOIL, leads to slightly improving the already satisfactory match of the displacement histories, as gathered from Fig. 15. Such an improvement is not visible from the values in Table 3, reporting the comparison of displacement peak values obtained in OpenSees and SeismoStruct when input to the macro-element in the latter program is taken from DEEPSOIL or the soil-block; however, this comparison is not deemed to be significant due to the very low magnitude of the displacements at hand. For the very same reason, the comparison between OpenSees and SeismoStruct in terms of near-field soil-footing quantities is not shown here, given that for this case of very weak excitation the soil response is essentially linear and involves response values of magnitude in the order of 10−5 or 10−6 (m or rad).

Comparison of structural displacements from OpenSees and SeismoStruct, for BOWW soil profile and record “Accel Low”, in terms of a histories and b FAS, with the free-field surface acceleration signal from OpenSees applied to the macro-element in SeismoStruct
When the “Accel High” record is considered, the match of displacement histories from OpenSees and SeismoStruct, as shown in Fig. 16a, is overall good, but worse than for record “Accel Low”. This is somehow expected, given the higher record intensity and thus higher levels of nonlinearity experienced by the soil: in these conditions, the differences between the nonlinear modelling approaches in the macro-element and the soil-block are more obvious, as already observed above for the comparison of the soil-block analyses against DEEPSOIL. The same discrepancies can be noted in terms of FAS, in Fig. 16b. However, such a divergence is caused not only by the macro-element model itself, but also by the disagreement, readily visible in Fig. 17 and mostly related to the central part of the trace, between the seismic inputs for the SDOF applied in OpenSees and SeismoStruct. As done for record “Accel Low”, it was confirmed that using the free-field surface acceleration history from the soil-block analysis as input for the macro-element, instead of the signal from DEEPSOIL, the match does improve, as can be clearly gathered from Fig. 18. This improvement is also apparent from the values in Table 4, reporting the comparison of displacement peak values obtained in OpenSees and SeismoStruct for the two different macro-element input types.

Comparison of structural displacements from OpenSees and SeismoStruct, for BOWW soil profile and record “Accel High”, in terms of a histories and b FAS, with the free-field surface acceleration signal from DEEPSOIL applied to the macro-element in SeismoStruct

Comparison of free-field surface acceleration signals obtained from the soil-block model in OpenSees and from DEEPSOIL (input for the macro-element in SeismoStruct), for BOWW soil profile and record “Accel High”

Comparison of structural displacements from OpenSees and SeismoStruct, for BOWW soil profile and record “Accel High”, in terms of a histories and b FAS, with the free-field surface acceleration signal from OpenSees applied to the macro-element in SeismoStruct
A remark is worth to be added concerning the comparison values reported in Table 3 and Table 4. It was observed that using the macro-element parameter values obtained from the expressions mentioned in Sect. 5.2 and reported in Cavalieri et al. (2020), without carrying out the calibration effort needed to obtain a better agreement in terms of near-field soil-footing behaviour (see Table 6 below, for record “Accel High”), actually led to a more satisfactory match of the horizontal displacements of the structural SDOF between SeismoStruct and OpenSees: in particular, with no calibration, the relative differences were of 0.9% and 6.7% for record “Accel Low” and of 39.0% and − 3.1% for record “Accel High”, for the cases of input for the macro-element taken from DEEPSOIL and OpenSees, respectively. Considering the very low magnitude of the near-field soil-footing quantities (at least for this application), and also the higher relevance of structural displacements as required output in structural engineering applications, the calibration phase may be avoided and a better agreement in terms of structural response could thus be obtained. In summary, also for this stronger record the comparison can be deemed to be acceptable, even in the more common situation of macro-element input taken from a software package for site response analysis (instead of a FE-based model).
In order to highlight the importance of modelling nonlinear effects, as well as to clarify the role played by the nonlinear modelling in the divergences between the SeismoStruct and OpenSees results, the structural displacement histories and FAS from the two programs were also compared in the condition of linear soil material, only for one case, namely the BOWW soil profile and record “Accel High”. The latter case was selected among the three cases considered herein as it showed the widest hysteresis loop of the macro-element, and thus the maximum excursion in the nonlinear field. To allow for the comparison to be carried out, several modifications were needed in both models. In particular, in the OpenSees soil-block model, the soil layers were simply assigned linear material, whilst in SeismoStruct the macro-element was replaced with six (independent) linear springs and dashpots, which were assigned the values adopted for the far-field initial elastic stiffness and damping coefficients, so as to reproduce a “linear macro-element”. The free-field surface acceleration history from the linear soil-block analysis was employed as input for this linear macro-element.
From Fig. 19a, it can be readily observed how the structural displacements reach amplitudes much higher than in the nonlinear case (see Fig. 18), given the absence of energy dissipation due to nonlinear effects in the soil. Figure 19 shows that the obtained agreement can be deemed to be satisfactory. Despite differences in the nonlinear modelling are excluded in this case, significant differences in the modelling approaches used for the soil-block and the macro-element are still present in the linear case, and concern, among other things, the damping formulation in the soil portion, as already discussed in Sect. 5.4 above. Moreover, it is noted that in this linear field exercise, for the soil-block a damping ratio of 1.4% was used, a value that was calibrated with reference to the nonlinear soil-column case (see Sect. 4.2.1). In light of the discussed modelling differences, the relatively small discrepancies observed in Fig. 19, also highlighted in terms of displacement peak values in Table 5, can be considered as totally acceptable.

Comparison of structural displacements from OpenSees and SeismoStruct, for BOWW soil profile with linear soil material and record “Accel High”, in terms of a histories and b FAS, with the free-field surface acceleration signal from OpenSees applied to the linear macro-element in SeismoStruct
Figures 20 and 21 show the comparison between the two programs with regards to the near-field soil-footing behaviour, in terms of horizontal displacement histories, force-displacement curves, settlement histories and moment-rotation curves, for the case when the free-field surface acceleration history from the soil-block analysis is adopted as input for the macro-element. The macro-element in SeismoStruct directly outputs such quantities. On the other hand, in OpenSees use was made of several recorders and post-processing of the results. In particular, the horizontal displacement and settlement histories in the near-field were obtained by subtracting the free-field displacement values (in one of the outermost nodes of the soil-block surface) from the values recorded at the foundation node of the SDOF; the shear force was retrieved by summing the shear forces in the zeroLength contact elements connecting the footing slab to the soil-block; finally, the rotation and moment histories were simply recorded at the foundation node of the SDOF. It was observed that the soil underneath the foundation does not experience a permanent horizontal displacement (see Fig. 20a), whilst a residual settlement is readily observed in Fig. 21a; the macro-element exhibits an oscillating behaviour also in the vertical direction, due to uplift upon rocking response, which is not captured by the soil-block with SDOF model, which presents a more plastic rocking response, indicating the difficulties of a 3D FE approach to model these limit gap opening/closing responses that are not a “continuum” type of behaviour. On another note, the shape of the two hysteresis curves (see Figs. 20b and 21b) highlights occurrence of energy dissipation, as expected in this case of relatively strong excitation. The match can be deemed to be satisfactory for all quantities, also considering, once again, the significant modelling differences in the two programs, as well as the very low values of displacements and rotations involved in this case. The goodness-of-fit can also be gathered from Table 6, reporting the comparison of peak response values (or residual values, in the case of settlement) obtained in OpenSees and SeismoStruct for the five quantities related to the near-field soil-footing behaviour.

Comparison of results from OpenSees and SeismoStruct, for BOWW soil profile and record “Accel High”, in terms of near-field soil-footing a horizontal displacement histories and b force-displacement curves

Comparison of results from OpenSees and SeismoStruct, for BOWW soil profile and record “Accel High”, in terms of near-field soil-footing a settlement histories and b moment-rotation curves
5.4.2 Academic profile
The very same steps described for the BOWW profile were undertaken for the academic profile under the “Accel High” record, confirming the conclusions obtained above. A damping ratio of 0.3% was selected for the soil, as done for the nonlinear soil-column case (see Sect. 4.2.2), while the two control frequencies were set to the first frequency of the deposit and five times that frequency, namely 1.25 Hz and 6.25 Hz. For this profile, the deamplification effect caused by energy dissipation in the soil layers is more pronounced than for the BOWW profile, as can also be noted comparing the maximum acceleration plots in Sect. 4.2, and this is the reason why smaller peak displacements are reached.
The comparison of structural displacements in the global x-direction, obtained in OpenSees and SeismoStruct, is shown in terms of histories and FAS in Figs. 22a and b, respectively. The match is quite satisfactory but not perfect, owing also to the disagreement, readily visible in Fig. 23, between the seismic inputs for the SDOF applied in OpenSees and SeismoStruct. As done before, it was found that using the free-field surface acceleration history from the soil-block analysis as input for the macro-element, instead of the signal from DEEPSOIL, the match does improve and results to be almost perfect, as can be gathered from Fig. 24. This improvement is also highlighted by the reduced relative difference reported in Table 7. In general, the quality of the match is higher than for the BOWW profile under the same record, as expected, given the uniform properties of the academic profile.

Comparison of structural displacements from OpenSees and SeismoStruct, for academic soil profile and record “Accel High”, in terms of a histories and b FAS, with the free-field surface acceleration signal from DEEPSOIL applied to the macro-element in SeismoStruct

Comparison of free-field surface acceleration signals obtained from the soil-block model in OpenSees and from DEEPSOIL (input for the macro-element in SeismoStruct), for academic soil profile and record “Accel High”

Comparison of structural displacements from OpenSees and SeismoStruct, for academic soil profile and record “Accel High”, in terms of a histories and b FAS, with the free-field surface acceleration signal from OpenSees applied to the macro-element in SeismoStruct
As done previously for the BOWW profile, also for the academic profile it was observed that using the macro-element parameter values obtained from the expressions mentioned in Sect. 5.2, without carrying out the calibration effort needed to obtain a better agreement in terms of near-field soil-footing behaviour (see Table 8 below), actually led to a more satisfactory match of the horizontal displacements of the structural SDOF between SeismoStruct and OpenSees: in particular, with no calibration, the relative differences were of 7.6% and − 1.2%, for the cases of input for the macro-element taken from DEEPSOIL and OpenSees, respectively.
Coming to the comparison between the two programs concerning the near-field soil-footing behaviour, again in terms of horizontal displacement histories, force-displacement curves, settlement histories and moment-rotation curves, with the surface acceleration signal from OpenSees applied to the macro-element, also in this case the macro-element undergoes a relatively high level of nonlinearity, with values for all quantities of the same order of magnitude as those for the BOWW profile, as shown in Figs. 25 and 26 and Table 8. The discussion presented in Sect. 5.4.1 for the BOWW profile also applies to this case.

Comparison of results from OpenSees and SeismoStruct, for academic soil profile and record “Accel High”, in terms of near-field soil-footing a horizontal displacement histories and b force-displacement curves

Comparison of results from OpenSees and SeismoStruct, for academic soil profile and record “Accel High”, in terms of near-field soil-footing a settlement histories and b moment-rotation curves
Overall, it is possible to conclude that the considered macro-element model is successfully verified also with reference to this simple academic profile and even in the common situation of macro-element input taken from a site response analysis program or equal to the free-field motion in general.
6 Conclusions
In this work, a nonlinear SSI macro-element model (introduced in SeismoStruct) was verified by comparing the structural response and near-field soil-footing behaviour of two equivalent SDOF systems: either using the macro-element directly or by modelling it via a 3D nonlinear FE soil-block model (developed in OpenSees and itself verified against STRATA and DEEPSOIL results). Overall, the described comparisons, related to both soil-block and macro-element verifications, were found to be very good.
Regarding the macro-element’s accuracy, it was shown that the quality of the match decreases (i) with the record intensity, as expected, as the differences in nonlinear response in the macro-element and the soil-block are more evident, and (ii) if the input on the macro-element is taken from a site response analysis program, as it is commonly done, but this is a matter of input selection, rather than of accuracy of the element’s nonlinear formulation. The quality of the match is also dependent on the soil profile considered, and again it was unsurprising that for a simple academic profile with uniform properties the match proved even the more satisfactory.
It is possible to conclude that in all cases the adopted macro-element was able to emulate well the response of a refined nonlinear soil-block model, providing sufficiently accurate structural displacements and quantities related to the near-field soil-footing behaviour. In particular, the structural displacements are the most commonly required structural response output in engineering applications. Amongst the latter, the derivation of fragility functions, used in seismic risk assessment endeavours, will most benefit from the availability of the verified macro-element model, which will allow the appropriate consideration of nonlinear SSI effects with a reasonable computational cost.
Data availability
All data used in this study are available from the authors upon request.
Code availability
Not applicable.
Change history
23 July 2022
Missing Open Access funding information has been added in the Funding Note.
References
Bolisetti C, Whittaker AS, Mason HB, Almufti I, Willford M (2014) Equivalent linear and nonlinear site response analysis for design and risk assessment of safety-related nuclear structures. Nucl Eng Des 275:107–121
Bolisetti C, Whittaker AS, Coleman JL (2018) Linear and nonlinear soil-structure interaction analysis of buildings and safety-related nuclear structures. Soil Dyn Earthq Eng 107:218–233
Cavalieri F, Correia AA, Crowley H, Pinho R (2020) Dynamic soil-structure interaction models for fragility characterisation of buildings with shallow foundations. Soil Dyn Earthq Eng 132:106004
Cavalieri F, Correia AA, Pinho R (2021a) On the applicability of transfer function models for SSI embedment effects. Infrastructures 6(10):137
Cavalieri F, Correia AA, Pinho R (2021b) Variations between foundation-level recordings and free-field earthquake ground motions: numerical study at soft-soil sites. Soil Dyn Earthq Eng 141:106511
CEN (2004a) EN 1998-1:2004. Eurocode 8: Design of structures for earthquake resistance - Part 1: General rules, seismic actions and rules for buildings. European Committee for Standardization
CEN (2004b) EN 1997-1:2004. Eurocode 7: Geotechnical design - Part 1: General rules. European Committee for Standardization
Chatzigogos CT, Figini R, Pecker A, Salençon J (2011) A macroelement formulation for shallow foundations on cohesive and frictional soils. Int J Numer Anal Meth Geomech 35(8):902–931
Correia AA (2011) A pile-head macro-element approach to seismic design of monoshaft-supported bridges, PhD thesis, European School for Advanced Studies in Reduction of Seismic Risk, (ROSE School), Pavia, Italy, 2011
Correia AA (2013) Recent advances on macro-element modeling: shallow and deep foundations. In: Proceedings of Final workshop of project Compatible soil and structure yielding to improve system performance (CoSSY), Oakland, CA, USA
Correia AA, Paolucci R (2021) A 3D coupled nonlinear shallow foundation macro-element for seismic soil-structure interaction analysis. Earthquake Engineering and Structural Dynamics, submitted for publication.
D’Amico M, Felicetta C, Russo E, Sgobba S, Lanzano G, Pacor F, Luzi L (2020) Italian Accelerometric Archive v3.1 - Istituto Nazionale di Geofisica e Vulcanologia, Dipartimento della Protezione Civile Nazionale. https://doi.org/10.13127/itaca.3.1. Available at: http://itaca.mi.ingv.it/ItacaNet_31/#/home. Accessed from 17 Jan 2022
Darendeli MB (2001) Development of a new family of normalized modulus reduction and material damping curves. PhD thesis, University of Texas at Austin, Texas, USA
Dost B, Ruigrok E, Spetzler J (2017) Development of seismicity and probabilistic hazard assessment for the Groningen gas field. Neth J Geosci 96(5):s235–s245
Edwards B, Ntinalexis M (2021) Defining the usable bandwidth of weak-motion records: application to induced seismicity in the Groningen Gas Field, the Netherlands. J Seismolog 25:1043–1059
Fathi A, Sadeghi A, Azadi MRE, Hoveidae N (2020) Assessing the soil-structure interaction effects by direct method on the out-of-plane behavior of masonry structures (case study: Arge-Tabriz). Bull Earthq Eng 18(14):6429–6443
Figini R, Paolucci R, Chatzigogos CT (2012) A macro-element model for non-linear soil-shallow foundation-structure interaction under seismic loads: theoretical development and experimental validation on large scale tests. Earthq Eng Struct Dyn 41(3):475–493
Gazetas G (1991) Foundation vibrations. In: Fang HY (ed) Foundations engineering handbook, 2nd edn. Van Nostrand Reinholds, New York, pp 553–593 ([chapter 15])
Gazetas G, Mylonakis G (2001) Soil-structure interaction effects on elastic and inelastic structures. In: Proceedings of fourth international conference on recent advances in geotechnical earthquake engineering and soil dynamics. Symposium in Honor of Professor WD Liam Finn, San Diego, CA, USA
Groholski DR, Hashash YM, Kim B, Musgrove M, Harmon J, Stewart JP (2016) Simplified model for small-strain nonlinearity and strength in 1D seismic site response analysis. J Geotech Geoenviron Eng 142(9):04016042
Hashash YMA, Musgrove MI, Harmon JA, Ilhan O, Xing G, Numanoglu O, Groholski DR, Phillips CA, Park D (2020) DEEPSOIL 7.0, User Manual. Urbana, IL, Board of Trustees of University of Illinois at Urbana-Champaign
Joyner WB, Chen AT (1975) Calculation of nonlinear ground response in earthquakes. Bull Seismol Soc Am 65(5):1315–1336
Karapetrou ST, Fotopoulou SD, Pitilakis KD (2015) Seismic vulnerability assessment of high-rise non-ductile RC buildings considering soil–structure interaction effects. Soil Dyn Earthq Eng 73:42–57
Kim S, Stewart JP (2003) Kinematic soil-structure interaction from strong motion recordings. J Geotech Geoenviron Eng 129(4):323–335
Kim B, Hashash YM, Stewart JP, Rathje EM, Harmon JA, Musgrove MI, Campbell KW, Silva WJ (2016) Relative differences between nonlinear and equivalent-linear 1-D site response analyses. Earthq Spectra 32(3):1845–1865
Kottke AR, Rathje EM (2008) Technical manual for Strata. Report No.: 2008/10. Pacific earthquake engineering research center. Berkeley, University of California
Kramer SL (1996) Geotechnical earthquake engineering. Prentice Hall, Hoboken, New Jersey, USA
Kruiver PP, van Dedem E, Romijn R, de Lange G, Korff M, Stafleu J, Gunnink JL, Rodriguez-Marek A, Bommer JJ, van Elk J, Doornhof D (2017) An integrated shear-wave velocity model for the Groningen gas field, The Netherlands. Bull Earthq Eng 15(9):3555–3580
Kuhlemeyer RL, Lysmer J (1973) Finite element method accuracy for wave propagation problems. J Soil Mech Found Div 99(5):421–427
Li XS, Wang ZL, Shen CK (1992) SUMDES: a nonlinear procedure for response analysis of horizontally-layered sites subjected to multi-directional earthquake loading. Department of Civil Engineering, University of California, Davis
LSTC—Livermore Software Technology Corporation (2013) LS-DYNA—a general-purpose finite element program capable of simulating complex problems. Livermore
Lysmer J, Kuhlemeyer RL (1969) Finite dynamic model for infinite media. J Eng Mech Div 95(4):859–878
Lysmer J, Ostadan F, Chin C (1999) Computer program SASSI2000 – a system for analysis of soil-structure interaction. University of California, Berkeley, California
Masing G (1926) Eigenspannungen und verfestigung beim messing (in German) [Fundamental stresses and strengthening with brass]. In: Proceedings of second international congress of applied mechanics, Zürich, Switzerland
Matasovic N (2006) D-MOD_2 - A computer program for seismic response analysis of horizontally layered soil deposits, earthfill dams, and solid waste landfills, User’s Manual. GeoMotions, LLC, Lacey, WA, p 20
Matasovic N, Vucetic M (1993) Cyclic characterization of liquefiable sands. J Geotech Eng 119(11):1805–1822
McKenna F, Fenves GL, Scott MH, Jeremic B (2000) OpenSees: open system for earthquake engineering simulation. Pacific Earthquake Engineering Research Center, University of California, Berkeley, USA. Available at: http://opensees.berkeley.edu. Accessed from 17 Jan 2022
Mitropoulou CC, Kostopanagiotis C, Kopanos M, Ioakim D, Lagaros ND (2016) Influence of soil–structure interaction on fragility assessment of building structures. Structures 6:85–98
Mosayk (2020) Soil-structure-interaction analysis in support of Groningen B-stations verification efforts. Report No. D16, Mosayk, Pavia, Italy, October 2020. Available at: http://www.nam.nl/feiten-en-cijfers/onderzoeksrapporten.html. Accessed from 17 Jan 2022
Mylonakis G, Gazetas G (2000) Seismic soil-structure interaction: beneficial or detrimental? J Earthq Eng 4(3):277–301
Mylonakis G, Nikolaou S, Gazetas G (2006) Footings under seismic loading: analysis and design issues with emphasis on bridge foundations. Soil Dyn Earthq Eng 26(9):824–853
Ntinalexis M, Bommer JJ, Ruigrok E, Edwards B, Pinho R, Dost B, Correia AA, Uilenreef J, Stafford PJ, van Elk J (2019) Ground-motion networks in the Groningen field: usability and consistency of surface recordings. J Seismol 23(6):1233–1253
Numanoglu OA, Musgrove M, Harmon JA, Hashash YM (2018) Generalized non-Masing hysteresis model for cyclic loading. J Geotech Geoenviron Eng 144(1):06017015
Phillips C, Hashash YM (2009) Damping formulation for nonlinear 1D site response analyses. Soil Dyn Earthq Eng 29(7):1143–1158
Pianese G (2018) Non-linear effects on the seismic response of buildings with foundation-structure interaction. PhD thesis, Politecnico di Milano, Milan, Italy
Pitilakis KD, Karapetrou ST, Fotopoulou SD (2014) Consideration of aging and SSI effects on seismic vulnerability assessment of RC buildings. Bull Earthq Eng 12(4):1755–1776
Pyke RM (2000) TESS: a computer program for nonlinear ground response analyses. TAGA Engineering Systems & Software, Lafayette, CA
Rodriguez-Marek A, Kruiver PP, Meijers P, Bommer JJ, Dost B, van Elk J, Doornhof D (2017) A regional site-response model for the Groningen gas field. Bull Seismol Soc Am 107(5):2067–2077
Schnabel PB, Lysmer J, Seed HB (2012) Computer program SHAKE: a computer program for earthquake response analysis of horizontally layered sites. University of California, Berkeley, California
Seismosoft (2021) SeismoStruct 2021 – a computer program for static and dynamic nonlinear analysis of framed structures, available at: http://www.seismosoft.com. Accessed from 17 Jan 2022
Stewart JP, Fenves GL, Seed RB (1999a) Seismic soil-structure interaction in buildings. I: analytical methods. J Geotech Geoenviron Eng 125(1):26–37
Stewart JP, Seed RB, Fenves GL (1999b) Seismic soil-structure interaction in buildings. II: empirical findings. J Geotech Geoenviron Eng 125(1):38–48
Stewart JP, Kwok AOL (2008) Nonlinear seismic ground response analysis: code usage protocols and verification against vertical array data. In: Proceedings of Geotechnical Earthquake Engineering and Soil Dynamics Congress IV, Sacramento, CA, USA
Stewart JP, Kwok AOL, Hashash YMA, Matasovic N, Pyke R, Wang Z, Yang Z (2008) Benchmarking of nonlinear geotechnical ground response analysis procedures. PEER Report 2008/04, Pacific Earthquake Engineering Research Center, University of California, Berkeley, p 186
Vijayendra KV, Nayak S, Prasad SK (2015) An alternative method to estimate fundamental period of layered soil deposit. Indian Geotech J 45(2):192–199
Yee E, Stewart JP, Tokimatsu K (2013) Elastic and large-strain nonlinear seismic site response from analysis of vertical array recordings. J Geotech Geoenviron Eng 139(10):1789–1801
Acknowledgements
The authors are very appreciative of the constructive feedback of two anonymous reviewers, which undoubtedly led to the improvement of the original version of the manuscript.
Funding
Open access funding provided by Università degli Studi di Pavia within the CRUI-CARE Agreement. The authors have not disclosed any funding.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have not disclosed any competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Cavalieri, F., Correia, A.A. & Pinho, R. Comparative nonlinear soil-structure interaction analyses using macro-element and soil-block modelling approaches. Bull Earthquake Eng 20, 3295–3328 (2022). https://doi.org/10.1007/s10518-022-01379-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10518-022-01379-y