
Abstract
This paper investigates the equilibria, their stability, and the periodic orbits in the vicinity of a rotating dumbbell-shaped body. First, the geometrical model of dumbbell-shaped body is established. The gravitational potential fields are obtained by the polyhedral method for several dumbbell-shaped bodies with various length–diameter ratios. Subsequently, the equilibrium points of these dumbbell-shaped bodies are computed and their stabilities are analyzed. Periodic orbits around equilibrium points are determined by the differential correction method. Finally, in order to understand further motion characteristic of dumbbell-shaped body, the effect of the rotating angular velocity of the dumbbell-shaped bodies is investigated. This study extends the research work of the orbital dynamics from simple shaped bodies to complex shaped bodies and the results can be applied to the dynamics of orbits around some asteroids.














Similar content being viewed by others

References
Alberti, A., Vidal, C.: Celest. Mech. Dyn. Astron. 98(2), 75 (2007)
Arribas, M., Elipe, A.: Phys. Lett. A 281(2), 142 (2001)
Byrd, P.F., Friedman, M.D.: Handbook of Elliptic Integrals for Engineers and Physicists, vol. 67. Springer, Berlin (1954)
Descamps, P., Marchis, F., Berthier, J., Emery, J., Duchêne, G., De Pater, I., Wong, M., Lim, L., Hammel, H., Vachier, F., et al.: Icarus 211(2), 1022 (2011)
Fukushima, T.: Celest. Mech. Dyn. Astron. 108(4), 339 (2010)
Hudson, R.S., Ostro, S.J., et al.: Science 263(5149), 940 (1994)
Kellog, O.D.: Foundations of Potential Theory. Courier Dover Publications, New York (1929)
Liu, X., Baoyin, H., Ma, X.: Astrophys. Space Sci. 333(2), 409 (2011a)
Liu, X., Baoyin, H., Ma, X.: Astrophys. Space Sci. 334(2), 357 (2011b)
MacMillan, W.D.: The Theory of the Potential: Theoretical Mechanics. Dover Publications, New York (1958)
Ostro, S.J., Scott, R., Nolan, M.C., Margot, J.-L., Scheeres, D.J., Campbell, D.B., Magri, C., Giorgini, J.D., Yeomans, D.K., et al.: Science 288(5467), 836 (2000)
Riaguas, A., Elipe, A., Lara, M.: Celest. Mech. Dyn. Astron. 73(1), 169 (1999)
Riaguas, A., Elipe, A., López-Moratalla, T.: Celest. Mech. Dyn. Astron. 81(3), 235 (2001)
Scheeres, D.J., Ostro, S.J., Hudson, R., Werner, R.A.: Icarus 121(1), 67 (1996)
Werner, R.A.: Celest. Mech. Dyn. Astron. 59(3), 253 (1994)
Werner, R.A., Scheeres, D.J.: Celest. Mech. Dyn. Astron. 65(3), 313 (1996)
Yu, Y., Baoyin, H.: Astron. J. 143(3), 62 (2012)
Acknowledgements
This work was supported by the National Basic Research Program of China (“973” Program) (Grant No. 2012CB720000), the National Natural Science Foundation of China (Grant No. 11102020), and Research Fund for the Doctoral Program of Higher Education of China (Grant No. 20101101120001).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Polyhedron potential method
According to the polyhedron method, an arbitrary-shaped body can be meshed into a polyhedron; each face of the polyhedron is a triangle. Three vertices in the surface of the body and the mass center of the body constitute a tetrahedron. The potential of the tetrahedron at point P can be transferred to the integral of its faces and corresponding edges. The general formula can be stated as
Here L e represents line factor.
r i represents the distance from P to vertex of triangle i, c ij represents the length of the side e ij .
ω f represents the face factor,
r i means the vector directing from origin (mass center) o to vertex i. i,j,k are three vertexes for one triangle. r e means the vector directing from any point on line e to point P.
\({E_{12}} = {\hat{n}_{A}}\hat{n}_{12}^{A} + {\hat{n}_{B}}\hat{n}_{21}^{B}\). Here edge e 12 is the intersecting line of face A and B. \({\hat{n}_{A}}\) represents the outward normal vector of face A. \(\hat{n}_{12}^{A}\) represents the normal vector of edge e 12 contained in face A.
\({F_{f}} = {\hat{n}_{f}}\hat{n}_{f}^{T}\), where \({\hat{n}_{f}}\) represents the outward normal direction vector of face f.
The potential of the arbitrary-shaped body at point P can be obtained by summing the potential of all tetrahedrons at point P.
Appendix B: Detail information for dumbbell-shaped modeling
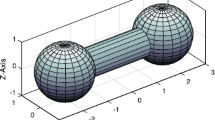
The dumbbell-shaped body consists of two incomplete spheres and a cylinder. For the sphere parts, 400 points are selected uniformly on the surface of a sphere according to the longitude and latitude and the sphere is meshed into 760 triangular facets as shown in Fig. 15(a). As the points on the ball-gap part, it changes the x-coordinate into one fixed value which is a function of m. So those points are in one plane parallel to the yz-plane. The red circle in Fig. 15(a) shows this plane. Three vertices of each facet and the mass center of the sphere compose one tetrahedral. Therefore each incomplete sphere part in the dumbbell-shaped model is divided into 760 tetrahedrons.

The model details of the dumbbell-shaped body
For the cylinder part, one also uniformly chooses 20 points on the circle both in the left and right planes. Then the cylinder is divided into 80 tetrahedrons as shown in Fig. 15(b).
By the above process the whole dumbbell-shaped body is built up by 1600 tetrahedrons. The coordinate of each point in a Cartesian coordinate frame is certain. The potential of the model can be solved by calculating each edge and each facet of the model according to the relevant formula shown in Appendix A.
Rights and permissions
About this article
Cite this article
Li, X., Qiao, D. & Cui, P. The equilibria and periodic orbits around a dumbbell-shaped body. Astrophys Space Sci 348, 417–426 (2013). https://doi.org/10.1007/s10509-013-1592-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10509-013-1592-1