
Abstract
The single facility location problem in multiple regions with different norms (SMDN) generalizes the well-known Weber Problem. The SMDN consists of finding the optimum location of a single facility in the plane which is partitioned into multiple regions where the distance to travel in each region is measured or approximated with different norms. In this study, we specifically focus on the SMDN considering three regions with either rectilinear or Euclidean norms. We first introduce some analytical properties of this problem. Then, we devise a specially tailored branch-and-bound algorithm, i.e. a Big Square Small Square algorithm (BSSS), and two heuristics, named as Discrete Approximation algorithm (DA) and Modified Weiszfeld procedure (MW). The performance of the proposed approaches are tested using both standard test instances from the literature and randomly generated instances. According to our extensive computational experiments, the BSSS stands out to be a suitable exact solution approach in terms of both accuracy and efficiency when commercial mixed integer nonlinear solvers are not applicable. Besides, we also observe that the DA yields quite accurate solutions at the expense of high computation times while the MW arises to be the most efficient method with the least accuracy.




Similar content being viewed by others
References
Akyüz, M. H. (2017). The capacitated multi-facility Weber problem with polyhedral barriers: Efficient heuristic methods. Computers & Industrial Engineering, 113, 221–240.
Akyüz, M. H., Altınel, İK., & Öncan, T. (2014). Location and allocation based branch and bound algorithms for the capacitated multi-facility Weber problem. Annals of Operations Research, 222(1), 45–71.
Akyüz, M. H., Öncan, T., & Altınel, İK. (2012). Efficient approximate solution methods for the multi-commodity capacitated multi-facility Weber problem. Computers & Operations Research, 39(2), 225–237.
Akyüz, M. H., Öncan, T., & Altınel, İK. (2019). Branch and bound algorithms for solving the multi-commodity capacitated multi-facility Weber problem. Annals of Operations Research, 279(1), 1–42.
Aras, N., Altınel, İK., & Orbay, M. (2007). New heuristic methods for the capacitated multi-facility Weber problem. Naval Research Logistics, 54(1), 21–32.
Bazaraa, M. S., Sherali, H. D., & Shetty, C. M. (2006). Nonlinear programming: Theory and algorithms (3rd ed.). NJ: Wiley.
Brimberg, J., Hansen, P., Mladenović, N., & Taillard, E. D. (2000). Improvements and comparison of heuristics for solving the uncapacitated multisource Weber problem. Operations Research, 48(3), 444–460.
Brimberg, J., Kakhki, H. T., & Wesolowsky, G. O. (2003). Location among regions with varying norms. Annals of Operations Research, 122(1–4), 87–102.
Brimberg, J., Kakhki, H. T., & Wesolowsky, G. O. (2005). Locating a single facility in the plane in the presence of a bounded region and different norms. Journal of the Operations Research Society of Japan, 48(2), 135–147.
Brimberg, J., Love, R., & Mladenović, N. (2009). Extension of the Weiszfeld procedure to a single facility minisum location model with mixed \(\ell _{p}\)-norms. Mathematical Methods of Operational Research, 70(2), 269.
Brimberg, J., Walker, J. H., & Love, R. F. (2007). Estimation of travel distances with the weighted \(\ell _{p}\)-norm: Some empirical results. Journal of Transport Geography, 15(1), 62–72.
Church, R. L. (2019). Understanding the Weber location paradigm. Contributions to location analysis (pp. 69–88). Springer, Cham.
Drezner, Z., Brimberg, J., Mladenović, N., & Salhi, S. (2016). New local searches for solving the multi-source Weber problem. Annals of Operations Research, 246(1–2), 181–203.
Drezner, Z., Klamroth, K., Schöbel, A., & Wesolowsky, G. O. (2002). The Weber problem. In Z. Drezner & H.W. Hamacher (Eds.), Facility location: Applications and theory (pp. 1–24). Springer, Berlin.
Francis, R. L., McGinnis, L. F., & White, J. A. (1992). Facility layout and location: An analytical approach (2nd ed.). NJ: Prentice-Hall.
Franco, L., Velasco, F., & Gonzalez-Abril, L. (2012). Gate points in continuous location between regions with different \(\ell _{p}\) norms. European Journal of Operational Research, 218(3), 648–655.
Franco, L., Velasco, F., Gonzalez-Abril, L., & Mesa, J. A. (2018). Single-facility location problems in two regions with \(\ell _{1}\) and \(\ell _{q}\) norms separated by a straight line. European Journal of Operational Research, 269(2), 577–589.
Gottfried, B. S., & Weisman, J. (1973). Introduction to optimization theory. NJ: Prentice-Hall.
Hale, T. S., & Moberg, C. R. (2003). Location science research: A review. Annals of Operations Research, 123(1), 21–35.
Hansen, P., Mladenović, N., & Taillard, E. (1998). Heuristic solution of the multisource Weber problem as a p-median problem. Operations Research Letters, 22(2–3), 55–62.
Hansen, P., Peeters, D., Richard, D., & Thisse, J. F. (1985). The minisum and minimax location problems revisited. Operations Research, 33(6), 1251–1265.
Hansen, P., Perreur, J., & Thisse, J. F. (1981). On the location of an obnoxious facility. Sistemi Urbani, 3, 299–317.
Love, R. F., Morris, J. G., & Wesolowsky, G. O. (1988). Facilities location: Models and methods. NY: North Holland.
Michelot, C., & Lefebvre, O. (1987). A primal-dual algorithm for the Fermat-Weber problem involving mixed gauges. Mathematical Programming, 39(3), 319–335.
Mitchell, J., & Papadimitriou, C. (1987). The weighted region problem. In Proceedings of the third annual symposium on computational geometry (pp. 30–38).
Moradi, E., & Bidkhori, M. (2009). Single facility location problem. In R. Z. Farahani, M. Hekmatfar (Eds.), Facility location: Concepts, models, algorithms and case studies (pp. 37–68). Springer, Berlin.
Parlar, M. (1994). Single facility location problem with region-dependent distance metrics. International Journal of Systems Science, 25(3), 513–525.
Planchart, A., & Hurter, A. P., Jr. (1975). An efficient algorithm for the solution of the Weber problem with mixed norms. SIAM Journal on Control, 13(3), 650–665.
Plastria, F. (1992). GBSSS: The generalized big square small square method for planar single-facility location. European Journal of Operational Research, 62(2), 163–174.
Plastria, F. (2019). Pasting gauges I: Shortest paths across a hyperplane. Discrete Applied Mathematics, 256, 105–137.
Weiszfeld, E. (1937). Sur le point pour lequel la somme des distances de n points donnés est minimum. Tohoku Mathematical Journal, First Series, 43, 355–386.
Wendell, R. E., & Hurter, J. A. P. (1973). Location theory, dominance, and convexity. Operations Research, 21(1), 314–320.
Wesolowsky, G. O. (1993). The Weber problem: History and perspectives. Location Science, 1, 5–23.
Zaferanieh, M., Kakhki, H. T., Brimberg, J., & Wesolowsky, G. O. (2008). A BSSS algorithm for the single facility location problem in two regions with different norms. European Journal of Operational Research, 190(1), 79–89.
Acknowledgements
This work has been partially supported by the Scientific and Technical Research Council of Türkiye - TÜBİTAK (Grant No: 217M477).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix A: Characterization of the gate points for the SMDN3
Appendix A: Characterization of the gate points for the SMDN3
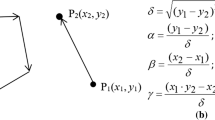
We introduce a characterization of the gate points for the SMDN3. Note that the determination of the gate point is equivalent to finding the shortest path between two points. Given two lines \(s_1 \equiv y= m_1 x+ n_1\) and \(s_2 \equiv y= m_2 x+ n_2\) which partition the plane into three regions \(\Omega _1\), \(\Omega _2\) and \(\Omega _3\) with \(\ell _{p}\), \(\ell _{q}\) and \(\ell _{p}\) norms respectively, we are solely interested in finding the shortest path from a point \(\mathbf {P_{i}} \in \Omega _1\) to another point \(\mathbf {P_{j}} \in \Omega _3\). That is to say, we tackle the shortest path problem with the objective function of minimizing the distance from \(\mathbf {P_{i}}\) to \(\mathbf {P_{j}}\), i.e. \(d(\mathbf {P_{i}},\mathbf {P_{j}})\), which is defined as follows:
where \(d_{p}(\mathbf {P_{i}}, \mathbf {u_1})\) stands for the \(\ell _{p}\) norm distance between \(\mathbf {P_{i}}\) and gate point \(\mathbf {u_1}\), \(d_{q}(\mathbf {u_1},\mathbf {u_2})\) denotes the \(\ell _{q}\) norm distance between gate points \(\mathbf {u_1}\) and \(\mathbf {u_2}\) and \(d_{p}(\mathbf {u_2},\mathbf {P_{j}})\) is for the \(\ell _{p}\) norm distance between gate point \(\mathbf {u_2}\) and \(\mathbf {P_{j}}\). Notice that when the facility and customers are located in different regions, the SMDN3 can also be defined as detecting the gate points \(\mathbf {u_1}\) and \(\mathbf {u_2}\) on the lines \(s_1\) and \(s_2\), respectively. We should remark that detecting the shortest path between two points located in two adjacent regions such as \(\mathbf {P_{i}} \in \Omega _1\) and \(\mathbf {P_{j}} \in \Omega _2\) or \(\mathbf {P_{i}} \in \Omega _2\) and \(\mathbf {P_{j}} \in \Omega _3\) reduces to the SMDN2. Besides, the results provided here can also be extended to the SMDN instances with more than three regions.
Recall that we address both variants of the SMDN3, i.e. the SMDN3-\(\ell _{1}\) and the SMDN3-\(\ell _{2}\). In the next, each SMDN3 variant is analyzed separately considering the test instances described in Sect. 4.
1.1 A.1 The SMDN3-\(\ell _{1}\)
First of all, we focus on the SMDN3-\(\ell _{1}\) where the plane is partitioned into three regions with two separating lines \(s_1 \equiv y= m_1 x+ n_1\) and \(s_2 \equiv y= m_2 x+ n_2\). We address three cases that arise depending on the slopes of the separating lines \(s_1\) and \(s_2\), \(m_1< m_2 < 0\), \(m_2< m_1 < 0\) and \(m_1< 0 < m_2\). Notice that, the cases arising when \(m_1> m_2 > 0\), \(m_2> m_1 > 0\) and \(m_1> 0 > m_2\) hold are similar to the cases when \(m_1< m_2 < 0\), \(m_2< m_1 < 0\) and \(m_1< 0 < m_2\) are satisfied, respectively. Notice that, by switching the values of \(m_1\) and \(m_2\) with each other, the latter three cases become equivalent to the former three ones, respectively. Consequently, we skip their descriptions here for the sake of shortness. Finally, note that, we do not focus on the case when \(m_1=m_2< 0\) holds which is trivial for the SMDN3-\(\ell _{1}\).
1.1.1 A.1.1 The case of two separating lines with slopes \(m_1< m_2 < 0\)
To better explain the calculation of the shortest path between points \(\mathbf {P_{1}}\in \Omega _1\) and \(\mathbf {P_{2}}\in \Omega _3\), the \(\Omega _3\) region is further partitioned into 5 sub-regions, i.e. \(R_1\), \(R_2\), \(R_3\), \(R_4\) and \(R_5\), which are defined by three points \(\mathbf {g_1}\), \(\mathbf {g_2}\) and \(\mathbf {g_3}\) on the separating line \(s_2\):

An instance of SMDN3-\(\ell _{1}\) where \(\Omega _3\) is partitioned into five sub-regions

The shortest paths for the SMDN3 considering different slanted separating line pairs
An illustration of these five sub-regions is depicted with Fig. 5 where we also present the vertical and horizontal projection points on \(s_1\), i.e. \(\mathbf {P_V}\) and \(\mathbf {P_H}\) respectively with coordinates:
Furthermore, the slopes of the lines \(s_1\) and \(s_2\) are calculated as follows:
and
respectively.
Then the shortest paths between point \(\mathbf {P_{1}}=(a_1,b_1) \in \Omega _1\) and five points \(\mathbf {P_{2}}=(a_2,b_2)\in \Omega _3, \mathbf {P_{3}}=(a_3,b_3)\in \Omega _3, \mathbf {P_{4}}=(a_4,b_4)\in \Omega _3, \mathbf {P_{5}}=(a_5,b_5)\in \Omega _3, \mathbf {P_{6}}=(a_6,b_6) \in \Omega _3\) are illustrated with Fig. 6a. The gate points of the shortest paths between point \(\mathbf {P_{1}}\in \Omega _1\) and points \(\mathbf {P_{2}} \in R_1\), \(\mathbf {P_{3}} \in R_2\), \(\mathbf {P_{4}}\in R_3\), \(\mathbf {P_{5}}\in R_4\) and \(\mathbf {P_{6}}\in R_5\) are given with Table 13 where \(\mathbf {t_1}\) is defined as follows:
At this stage, before proceeding with two other cases where \(m_2< m_1 < 0\) and \(m_1< 0 <m_2\) hold, we will introduce an alternative scheme for calculating the shortest path between two points, i.e. \(\mathbf {P}_{1}=(a_1,b_1) \in \Omega _1\) and \(\mathbf {P}_{2}=(a_2,b_2) \in \Omega _3\). To determine the shortest path between \(\mathbf {P}_{1}\) and \(\mathbf {P}_{2}\) we focus on the coordinates of \(\mathbf {P}_{1}\) and \(\mathbf {P}_{2}\) as well as the slopes \(m_1\) and \(m_2\). To this end, we address two cases where in the first one \(a_2 < a_1\) holds while in the second one \(a_1 < a_2\) is satisfied. These cases will be discussed using the rectangular hull defined by the corner points \(\mathbf {P}_{1}\) and \(\mathbf {P}_{2}\). The shortest path for the first case, where \(a_2 < a_1\) holds, which passes through the gate points \(\mathbf {v}\) and \(\mathbf {w}\), is illustrated with Fig. 7a.
On the other hand, for the second case, i.e. for \(a_1 < a_2\), we have five sub-cases: sub-case 1, sub-case 2, sub-case 3, sub-case 4 and sub-case 5, which are represented with Fig. 7b–f, respectively. Observe that in these figures, \(\mathbf {v}\) and \(\mathbf {w}\) denote optimal gate points between \(\mathbf {P}_1\) and \(\mathbf {P}_2\). Then, the shortest path between points \(\mathbf {P}_1\) and \(\mathbf {P}_2\) is as follows.

Rectangular hulls for the SMDN3-\(\ell _{1}\)
By taking a closer look at these sub-cases, one can easily calculate the coordinates of \(\mathbf {v}\) and \(\mathbf {w}\) as follows. In Fig. 7b, \(\mathbf {v}\) and \(\mathbf {w}\) stand for the vertical projection points of \(\mathbf {P}_1\) and \(\mathbf {P}_2\) on \(s_1\) and \(s_2\), respectively. In Fig. 7c, \(\mathbf {w}\) is the vertical projection point of \(\mathbf {P}_2\) on \(s_2\) and \(\mathbf {v}\) is a point on \(s_1\) within the rectangular hull, where its coordinates can be calculated using both \(m_1^{*}\) and \(\mathbf {w}\). In Fig. 7d, \(\mathbf {v}\) and \(\mathbf {w}\) are the horizontal and vertical projection points of \(\mathbf {P}_1\) and \(\mathbf {P}_2\) on \(s_1\) and \(s_2\), respectively. In Fig. 7e, \(\mathbf {v}\) is the horizontal projection point of \(\mathbf {P}_1\) on \(s_1\) and \(\mathbf {w}\) is a point on \(s_2\) within the rectangular hull which can be determined considering both the corner points \(m_2^{*}\) and \(\mathbf {v}\). In Fig. 7f, \(\mathbf {v}\) and \(\mathbf {w}\) stand for the horizontal projection points of \(\mathbf {P}_1\) and \(\mathbf {P}_2\) on \(s_1\) and \(s_2\), respectively.
Let the slopes of the lines between \(\mathbf {v}\) and \(\mathbf {w}\) be \(e_1\), \(e_2\), \(e_3\), \(e_4\) and \(e_5\) for the sub-case 1, sub-case 2, sub-case 3, sub-case 4 and sub-case 5, respectively. Note that, \(e_1> m_1^{*}>m_2^{*}\), \(e_2= m_1^{*}>m_2^{*}\), \(m_1^{*}>e_3>m_2^{*}\), \(m_1^{*}>e_4= m_2^{*}\) and \(m_1^{*}>m_2^{*}>e_5\) hold for the sub-case 1, sub-case 2, sub-case 3, sub-case 4 and sub-case 5, which are illustrated with Fig. 7b–f, respectively. Therefore, for each sub-case the coordinates of the gate points \(\mathbf {v}\) and \(\mathbf {w}\), can also be calculated taking into account the slopes \(m_1^{*}\) and \(m_2^{*}\) and the coordinates of \(\mathbf {P_1}\) and \(\mathbf {P_2}\).
Now we give an analytical result which states that the gate points of the shortest path between points \(\mathbf {P_1}\) and \(\mathbf {P_2}\) should be within the rectangular hull defined by the corner points \(\mathbf {P_1}\) and \(\mathbf {P_2}\).
Proposition 1
Gate points \(\mathbf {v}\) and \(\mathbf {w}\) of optimal 3-region shortest path \(d(\mathbf {P_1},\mathbf {P_2})\) between \(\mathbf {P_1}\in \Omega _1\) and \(\mathbf {P_2}\in \Omega _3\) are positioned within the intersection of the separating lines with the rectangular hull defined by the corner points \(\mathbf {P_1}\) and \(\mathbf {P_2}\).
Proof
Given \(\mathbf {P_1}\in \Omega _1\) and \(\mathbf {P_2}\in \Omega _3\), assume that the shortest path with distance \(d^{A}(\mathbf {P_1},\mathbf {P_2})\) passes through a gate point \(\mathbf {r}\) outside of the rectangular hull defined by the corner points \(\mathbf {P_1}\) and \(\mathbf {P_2}\). Note that \(\mathbf {v}\) is the closest gate point of \(\mathbf {P_1}\) and \(\mathbf {w}\) is the closest gate point of \(\mathbf {P_2}\). Furthermore, let \(\mathbf {h}\) be the corner point in the path between \(\mathbf {r}\) and \(\mathbf {v}\) according to the rectilinear distance. For the sake of conciseness we consider only the sub-case 1 for \(a_1 < a_2\) then a sketch of the proof is given with Fig. 8. For the case of \(a_2 < a_1\), and for the other sub-cases of \(a_1 < a_2\) similar sketches can be drawn. Let us select a gate point \(\mathbf {v}\) in the intersection of the separating line with the rectangular hull defined by the corner points \(\mathbf {P_1}\) and \(\mathbf {P_2}\). Since \(d^{A}(\mathbf {P_1},\mathbf {P_2})\) is supposed to be the shortest path distance then
holds which implies
However, since
hold by triangle inequalities yielding a contradiction to (A1). Hence, we conclude that the shortest path cannot pass through a gate point located outside of the intersection of separating lines with rectangular hull defined by the points \(\mathbf {P_1}\) and \(\mathbf {P_2}\). \(\square \)

Proof of Proposition 1—Rectangular hull defined by \(\mathbf {P_{1}}\) and \(\mathbf {P}_{2}\) (subcase for \(a_1 < a_2\))
1.1.2 A.1.2 The case of two separating lines with slopes \(m_2< m_1< 0\)
Now, we consider the case when \(m_2< m_1< 0\) holds. Given two separating lines \(s_1 \equiv y= m_1 x+ n_1\) and \(s_2 \equiv y= m_2 x+ n_2\) such that \(m_2< m_1< 0\) holds, the partitioning of the plane is described with Fig. 6b. Observe that \(\Omega _3\) is further partitioned into 5 sub-regions, say \(R_1\), \(R_2\), \(R_3\), \(R_4\) and \(R_5\), which are defined by three points \(\mathbf {g_1}\), \(\mathbf {g_2}\) and \(\mathbf {g_3}\) on the separating line \(s_2\):
Then the gate points of the shortest paths between point \(\mathbf {P_{1}}\in \Omega _1\) and five points \(\mathbf {P_{2}} \in R_1\), \(\mathbf {P_{3}} \in R_2\), \(\mathbf {P_{4}}\in R_3\), \(\mathbf {P_{5}}\in R_4\) and \(\mathbf {P_{6}}\in R_5\) are given with Table 14 where \(\mathbf {t_1}\) is calculated as follows:
1.1.3 A.1.3 The case of two separating lines with slopes \(m_1< 0 < m_2\)
The last case arises when \(m_1< 0 < m_2\) holds. First of all, note that the case of two separating lines with slopes \(m_2< 0 < m_1\) can be dealt with in a similar way. Hence, for the sake of shortness, we skip the details for the latter case.
Given two points \(\mathbf {P_i}=(a_i,b_i) \in \Omega _1\) and \(\mathbf {P_j}=(a_j,b_j) \in \Omega _3\), we are faced with two sub-cases where in the first one \(b_i < b_j\) is satisfied and in the second one \(b_j < b_i\) holds. These sub-cases are presented as follows.
Sub-case 1: \(b_i < b_j\)
The first sub-case is depicted with Fig. 6c where we are interested in finding the shortest path from a point \(\mathbf {P_1}=(a_1,b_1) \in \Omega _1\) to a point \(\mathbf {P_2}=(a_2,b_2) \in \Omega _3\) such that \(b_1 < b_2\) holds. Here, \(\Omega _3\) is partitioned into 3 sub-regions, named as \(R_1\), \(R_2\) and \(R_3\) which are defined by two points \(\mathbf {g_1}\) and \(\mathbf {g_2}\) on the separating line \(s_2\):
Given \(\mathbf {P_{1}}\in \Omega _1\), three points \(\mathbf {P_{2}}\in \Omega _3\), \(\mathbf {P_{3}}\in \Omega _3\) and \(\mathbf {P_{4}} \in \Omega _3\) are selected in sub-regions \(R_1\), \(R_2\) and \(R_3\) respectively such that \(b_1< b_2< b_3 < b_4 \) holds. Then, the gate points of the shortest paths from a point \(\mathbf {P_1}\in \Omega _1\) to points \(\mathbf {P_{2}} \in R_1\), \(\mathbf {P_{3}} \in R_2\) and \(\mathbf {P_{4}}\in R_3\) are presented with Table 15 where \(\mathbf {t_1}\) is as follows:
Subcase 2 : \(b_j < b_i\)
In this sub-case we try to find the shortest path from a point \(\mathbf {P_i}=(a_i,b_i) \in \Omega _1\) to a point \(\mathbf {P_j}=(a_j,b_j) \in \Omega _3\) such that \(b_j < b_i\) is satisfied. For this sub-case, \(\Omega _3\) is partitioned into 3 sub-regions, named as \(R_1\), \(R_2\) and \(R_3\) defined by a point \(\mathbf {g_3}\) on the separating line \(s_2\):
This sub-case is illustrated with Fig. 6d. Observe that given \(\mathbf {P_1} \in \Omega _1\), three points \(\mathbf {P_2}, \mathbf {P_3}, \mathbf {P_4} \in \Omega _3\), are selected in sub-regions \(R_1\), \(R_2\) and \(R_3\) respectively such that \(b_1> b_2> b_3 > b_4\) holds. Then, the gate points of the shortest paths from \(\mathbf {P_1}\in \Omega _1\) to \(\mathbf {P_2} \in R_1\), \(\mathbf {P_3} \in R_2\) and \(\mathbf {P_4}\in R_3\) are given with Table 16.
1.2 A.2 The SMDN3-\(\ell _{2}\)
In the second part, we concentrate on the SMDN3-\(\ell _{2}\) with two separating lines \(s_1 \equiv y= m_1 x+ n_1\) and \(s_2 \equiv y= m_2 x+ n_2\) such that \(m_1< m_2 < 0\) and \(m_2< m_1 < 0\), \(m_1=m_2< 0\) and \(m_1< 0 < m_2\) are satisfied. First, we introduce the cases of two separating lines with slopes \(m_1< m_2 < 0\) and \(m_2< m_1 < 0\) for which the calculations of the gate points are alike. Second, we present the case of two separating lines with slopes \(m_1=m_2< 0\). Finally, the case of two separating lines with slopes \(m_1< 0< m_2\) is addressed.
1.2.1 A.2.1 The cases of two separating lines with slopes \(m_1< m_2 < 0\) and \(m_2< m_1 < 0\)
In both cases, using two separating lines with slopes \(m_1< m_2 < 0\) and \(m_2< m_1 < 0\), \(\Omega _3\) is further partitioned into 3 sub-regions, i.e. \(R_1\), \(R_2\) and \(R_3\), which are defined by two points \(\mathbf {g_2}\) and \(\mathbf {g_3}\) on the separating line \(s_2\). We have shown these sub-regions with Fig. 9 where \(\mathbf {g_2}\) and \(\mathbf {g_3}\) are the vertical and horizontal projection points of a point \(\mathbf {g_1}\) on the separating line \(s_1\), respectively. The coordinates of the points \(\mathbf {g_1}\), \(\mathbf {g_2}\) and \(\mathbf {g_3}\) are respectively as follows:

An instance of the the SMDN3-\(\ell _{2}\) with three sub-regions of \(\Omega _3\)
Illustration of the cases with two separating lines with slopes \(m_1< m_2 < 0\) and \(m_2< m_1< 0\) are given with Fig. 10a, b, respectively. For both cases the coordinates of the gate points are given in Table 17 where
Furthermore, note that \(\mathbf {t_1}=(t_{11},t_{12})\) and \(\mathbf {t_2}=(t_{21},t_{22})\) are located within the convex hulls constructed by the points \(\mathbf {P_1}\) and \(\mathbf {P_2}\) and the points \(\mathbf {P_1}\) and \(\mathbf {P_4}\), respectively. They can be optimally determined by employing an unconstrained optimization method such as the golden section search algorithm (Bazaraa et al., 2006).

The shortest paths for the SMDN3-\(\ell _{2}\) separated by different line pairs with various slopes
1.2.2 A.2.2 The case of two separating lines with slopes \(m_2 = m_1 < 0\)
This case is illustrated with Fig. 10c. The coordinates of the point \(\mathbf {g_1}\) on the separating line \(s_1\), and points \(\mathbf {g_2}\) and \(\mathbf {g_3}\) on the separating line \(s_2\) are respectively as follows:
The gate points are presented with Table 18 where \(\mathbf {t_1}\) (\(\mathbf {t_2}\)) can be calculated keeping in mind the fact that the lines between \(\mathbf {P_1}\) and \(\mathbf {t_1}\) and, \(\mathbf {P_2}\) and \(\mathbf {t_3}\) (\(\mathbf {P_1}\) and \(\mathbf {t_2}\) and, \(\mathbf {P_4}\) and \(\mathbf {t_5}\)) have the same slopes. Besides, \(\mathbf {t_4}\) is calculated as follows:
1.2.3 A.2.3 The case of two separating lines with slopes \(m_1< 0 < m_2\)
This case is illustrated with Fig. 10d where the shortest path horizontally traverses the sub-region \(\Omega _2\) with \(\ell _1\) norm. The gate points on both \(s_1\) and \(s_2\) for each shortest path can be easily calculated by means of an unconstrained optimization approach, such as the golden section search method (Bazaraa et al., 2006).
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Altay, G., Akyüz, M.H. & Öncan, T. Solving a minisum single facility location problem in three regions with different norms. Ann Oper Res 321, 1–37 (2023). https://doi.org/10.1007/s10479-022-04952-5
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10479-022-04952-5