
Abstract
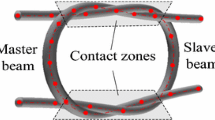
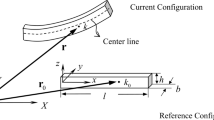
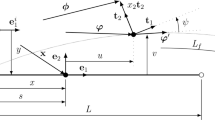
Under the frame of multibody dynamics, the contact dynamics of elasto-plastic spatial thin beams is numerically studied by using the spatial thin beam elements of absolute nodal coordinate formulation (ANCF). The internal force of the elasto-plastic spatial thin beam element is derived under the assumption that the plastic strain of the beam element depends only on its longitudinal deformation. A new body-fixed local coordinate system is introduced into the spatial thin beam element of ANCF for efficient contact detection in the contact dynamics simulation. The linear isotropic hardening constitutive law is used to describe the elasto-plastic deformation of beam material, and the classical return mapping algorithm is adopted to evaluate the plastic strains. A multi-zone contact approach of thin beams previously proposed by the authors is also introduced to detect the multiple contact zones of beams accurately, and the penalty method is used to compute the normal contact force of thin beams in contact. Four numerical examples are given to demonstrate the applicability and effectiveness of the proposed elasto-plastic spatial thin beam element of ANCF for flexible multibody system dynamics.

















Similar content being viewed by others
References
Maqueda, L.G., Mohamed, A.A., Shabana, A.A.: Use of general nonlinear material models in beam problems: Application to belts and rubber chains. J. Comput. Nonlinear Dyn. 5, 1090–1097 (2010)
Patel, M., Orzechowski, G., Tian, Q., et al.: A new multibody system approach for tire modeling using ANCF finite elements. Proc. Inst. Mech. Eng. Part K J. Multi-body Dyn. (2015). doi:10.1177/1464419315574641
Contreras, U., Recuero, A.M., Hamed, A.M., et al.: Implementation of continuum-based plasticity formulation for vehicle/soil interaction in multibody system algorithms. In: 2014 NDIA Ground Vehicle Systems Engineering and Technology Symposium, Novi, Michigan, 12–14 August 2014
Likins, P.W.: Finite element appendage equations for hybrid coordinate dynamic analysis. Int. J. Solids Struct. 5, 709–731 (1972)
Berzeri, M., Campanelli, M., Shabana, A.A.: Definition of the elastic forces in the finite-element absolute nodal coordinate formulation and the floating frame of reference formulation. Multibody Syst. Dyn. 5, 21–54 (2001)
Simo, J.C.: A finite strain beam formulation. The three-dimensional dynamic problem. Part I. Comput. Methods Appl. Mech. Eng. 49, 55–70 (1985)
Shabana, A.A.: Flexible multibody dynamics: review of past and recent developments. Multibody Syst. Dyn. 1, 189–222 (1997)
Ding, J., Wallin, M., Wei, C., et al.: Use of independent rotation field in the large displacement analysis of beams. Nonlinear Dyn. 76, 1829–1843 (2014)
Shabana, A.A.: An absolute nodal coordinate formulation for the large rotation and deformation analysis of flexible bodies. Technical Report. No. MBS96-1-UIC, University of Illinois at Chicago (1996)
Gerstmayr, J., Sugiyama, H., Mikkola, A.: Review on the absolute nodal coordinate formulation for large deformation analysis of multibody systems. J. Comput. Nonlinear Dyn. 8, 31016 (2013)
Tian, Q., Zhang, Y., Chen, L., et al.: Advances in the absolute nodal coordinate method for the flexible multibody dynamics. Adv. Mech. 40, 189–202 (2010). (in Chinese)
Sugiyama, H., Escalona, J.L., Shabana, A.A.: Formulation of three-dimensional joint constraints using the absolute nodal coordinates. Nonlinear Dyn. 31, 167–195 (2003)
Tian, Q., Zhang, Y.Q., Chen, L.P., et al.: Dynamics of spatial flexible multibody systems with clearance and lubricated spherical joints. Comput. Struct. 87, 913–929 (2009)
Zhao, J., Tian, Q., Hu, H.Y.: Deployment dynamics of a simplified spinning IKAROS solar sail via absolute coordinate based method. Acta Mech. Sin. 29, 132–142 (2013)
Liu, C., Tian, Q., Yan, D., et al.: Dynamic analysis of membrane systems undergoing overall motions, large deformations and wrinkles via thin shell elements of ANCF. Comput. Methods Appl. Mech. Eng. 258, 81–95 (2013)
Wang, Q.T., Tian, Q., Hu, H.Y.: Dynamic simulation of frictional contacts of thin beams during large overall motions via absolute nodal coordinate formulation. Nonlinear Dyn. 77, 1411–1425 (2014)
Wang, Q.T., Tian, Q., Hu, H.Y.: Dynamic simulation of frictional multi-zone contacts of thin beams. Nonlinear Dyn. (2015). doi:10.1007/s11071-015-2456-8
Sugiyama, H., Shabana, A.A.: Application of plasticity theory and absolute nodal coordinate formulation to flexible multibody system dynamics. J. Mech. Des. 126, 478 (2004)
Sugiyama, H., Shabana, A.A.: On the use of implicit integration methods and the absolute nodal coordinate formulation in the analysis of elasto–plastic deformation problems. Nonlinear Dyn. 37, 245–270 (2004)
Gerstmayr, J., Matikainen, M.K.: Analysis of stress and strain in the absolute nodal coordinate formulation. Mech. Based Des. Struct. Mach. 34, 409–430 (2006)
Gerstmayr, J., Shabana, A.A.: Analysis of thin beams and cables using the absolute nodal co-ordinate formulation. Nonlinear Dyn. 45, 109–130 (2006)
Tang, J.L., Ren, G.X., Zhu, W.D., et al.: Dynamics of variable-length tethers with application to tethered satellite deployment. Commun. Nonlinear Sci. Numer. Simul. 16, 3411–3424 (2011)
Khude, N., Melanz, D., Stanciulescu, L., et al.: A parallel GPU implementation of the absolute nodal coordinate formulation with a frictional/contact model for the simulation of large flexible body systems. In: ASME Conference on Multibody Systems and Nonlinear Dynamics (2011)
Gerstmayr, J., Irschik, H.: Vibrations of the elasto–plastic pendulum. Int. J. Nonlinear Mech. 38, 111–122 (2003)
Shi, W., Liu, J.Y.: Investigation on rigid-flexible coupling dynamics for elasto–plastic beam with large deformation. J. Shanghai Jiaotong Univ. 45, 1469–1474 (2011). (in Chinese)
Belytschko, T., Liu, W.K., Moran, B.: Nonlinear Finite Elements for Continua and Structures. Wiley, New York (2006)
Zavarise, G., Wriggers, P.: Contact with friction between beams in 3-D space. Int. J. Numer. Methods Eng. 49, 977–1006 (2000)
Litewka, P.: Enhanced multiple-point beam-to-beam frictionless contact finite element. Comput. Mech. 52, 1365–1380 (2013)
Chamekh, M., Mani-Aouadi, S., Moakher, M.: Modeling and numerical treatment of elastic rods with frictionless self-contact. Comput. Methods Appl. Mech. Eng. 198, 3751–3764 (2009)
Litewka, P.: Finite element analysis of beam-to-beam contact. Lecture notes in applied and computational mechanics. Springer, Berlin (2010)
Chung, J., Hulbert, G.M.: A time integration algorithm for structural dynamics with improved numerical dissipation: the generalized-\(\alpha \) method. J. Appl. Mech. 60, 371–375 (1993)
Arnold, M., Brüls, O.: Convergence of the generalized-\(\alpha \) scheme for constrained mechanical systems. Multibody Syst. Dyn. 18, 185–202 (2007)
Tian, Q., Liu, C., Machado, M., et al.: A new model for dry and lubricated cylindrical joints with clearance in spatial flexible multibody systems. Nonlinear Dyn. 64, 25–47 (2011)
Liu, C., Tian, Q., Hu, H.Y.: Dynamics and control of a spatial rigid-flexible multibody system with multiple cylindrical clearance joints. Mech. Mach. Theory 52, 106–129 (2012)
Acknowledgments
This work was supported in part by the National Natural Science Foundation of China (Grants 11290151 and 11221202). It was also supported in part by the Beijing Higher Education Young Elite Teacher Project (Grant YETP1201).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Wang, QT., Tian, Q. & Hu, HY. Contact dynamics of elasto-plastic thin beams simulated via absolute nodal coordinate formulation. Acta Mech. Sin. 32, 525–534 (2016). https://doi.org/10.1007/s10409-015-0533-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10409-015-0533-3