
Abstract
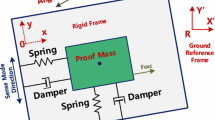
A new analytical model of a 3-degree-of-freedom (3-DOF) gyro-accelerometer system consisting of a 1-DOF drive and 2-DOF sense modes is presented. The model constructs lumped differential equations associated with each DOF of the system by vector analysis. The coupled differential equations thus established are solved analytically for their responses in both the time and frequency domains. Considering these frequency response equations, novel device design concepts are derived by forcing the sense phase to zero, which leads to a certain relationship between the structural frequencies, thereby causing minimization of the damping effect on the performance of the system. Furthermore, the feasibility of the present gyro-accelerometer structure is studied using a unique discriminatory scheme for the detection of both gyro action and linear acceleration at their events. This scheme combines the formulated settled transient solution of the gyro-accelerometer with the processes of synchronous demodulation and filtration, which leads to the in-phase and quadrature components of the system’s output signal. These two components can be utilized in the detection of angular motion and linear acceleration. The obtained analytical results are validated by simulation in a MATLAB/Simulink environment, and it is found that the results are in excellent agreement with each other.







Similar content being viewed by others

References
Yazdi, N., Ayazi, F., Najafi, K.: Micromachined inertial sensors. Proc. IEEE 86, 1640–1659 (1998)
Acar, C., Schofield, A.R., Trusov, A.A., et al.: Environmentally robust MEMS vibratory gyroscopes for automotive applications. IEEE Sens. J. 9, 1895–1906 (2009)
Tsai, N.C., Sue, C.Y.: Design and analysis of a tri-axis gyroscope micromachined by surface fabrication. IEEE Sens. J. 8, 1933–1940 (2008)
Kwon, K., Park, S.: A bulk-micromachined three-axis accelerometer using silicon direct bonding technology and polysilicon layer. Sens. Actuators A 66, 250–255 (1998)
Murakoshi, T., Endo, Y., Fukatsu, K., et al.: Electrostatically levitated ring-shaped rotational-gyro/accelerometer. Jpn. J. Appl. Phys. 42, 2468–2472 (2003)
Weng, J.H., Chieng, W.H., Lai, J.M.: Structural design and analysis of micromachined ring-type vibrating sensor of both yaw rate and linear acceleration. Sens. Actuators A 117, 230–240 (2005)
Alper, S.E., Akin, T.: Symmetrical and decoupled nickel microgyroscope on insulating substrate. Sens. Actuators A 115, 336–350 (2004)
Lufeng, C., Bin, X., Yuelin, W.: System-level simulation of vibratory micromachined gyroscope with fence structure. Acta Mech. Sin. 20, 172–177 (2004)
Acar, C., Shkel, A.: MEMS Vibratory Gyroscopes—Structural Approaches to Improve Robustness. Springer, Berlin (2009)
Verma, P., Shekhar, C., Arya, S.K., et al.: New design architecture of a 3-DOF vibratory gyroscope with robust drive operation mode and implementation. Microsyst. Technol. (2014). doi:10.1007/s00542-014-2384-4
Verma, P., Gopal, R., Arya, S.K.: Analytical modeling and simulation of a 2-DOF drive and 1-DOF sense gyro-accelerometer. Microsyst. Technol. 19, 1238–1249 (2013)
Verma, P., Gopal, R., Arya S.K.: Dynamic characteristics of vibratory gyro-accelerometer. In: Proceedings of the IEEE the 5th International Conference on Computers and Devices for Communication, Kolkata, India (2012)
Schofield, A.R., Trusov, A.A., Shkel, A.M.: Effects of operational frequency scaling in multi-degree of freedom MEMS gyroscopes. IEEE Sens. J. 8, 1672–1680 (2008)
Kuehnel, W.: Modelling of the mechanical behaviour of a differential capacitor acceleration sensor. Sens. Actuators A 48, 101–108 (1995)
Saukoski, M., Aaltonen, L., Halonen, K.A.I.: Effects of synchronous demodulation in vibratory MEMS gyroscopes: A theoretical study. IEEE Sens. J. 8, 1722–1733 (2008)
Feng, Z.C., Gore, K.: Dynamic characteristics of vibratory gyroscopes. IEEE Sens. J. 4, 80–84 (2004)
Acknowledgments
PV is grateful to HRDG, Council of Scientific and Industrial Research, New Delhi, India, for awarding her a Senior Research Fellowship that allowed her to pursue her PhD work.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Verma, P., Arya, S.K. & Gopal, R. Lumped parameter analytic modeling and behavioral simulation of a 3-DOF MEMS gyro-accelerometer. Acta Mech. Sin. 31, 910–919 (2015). https://doi.org/10.1007/s10409-015-0512-8
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10409-015-0512-8