
Abstract
The active manipulation of particle and cell trajectories in fluids by high-frequency standing surface acoustic waves (sSAW) allows to separate particles and cells systematically depending on their size and acoustic contrast. However, process technologies and biomedical applications usually operate with non-spherical particles, for which the prediction of acoustic forces is highly challenging and remains a subject of ongoing research. In this study, the dynamical behavior of prolate spheroids exposed to a three-dimensional acoustic field with multiple pressure nodes along the channel width is examined. Optical measurements reveal an alignment of the particles orthogonal to the pressure nodes of the sSAW, which has not been reported in literature so far. The dynamical behavior of the particles is analyzed under controlled initial conditions for various motion patterns by imposing a phase shift on the sSAW. To gain detailed understanding of the particle dynamics, a three-dimensional numerical model is developed to predict the acoustic force and torque acting on a prolate spheroid. Considering the acoustically induced streaming around the particle, the numerical results are in excellent agreement with experimental findings. Using the proposed numerical model, a dependence of the acoustic force on the particle shape is found in relation to the acoustic impedance of the channel ceiling. Hence, the numerical model presented herein promises high progress for the design of separation devices utilizing sSAW, exploiting an additional separation criterion based on the particle shape.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
The dynamical behavior of suspended particles and biological cells can be manipulated by tailored ultrasonic fields. Translational and rotational degrees of freedom in the acoustophoretic motion of the particles are dominated by two physical mechanisms. First, incident acoustic waves are scattered by the particles, leading to the primary acoustic radiation force (ARF) (King 1934; Settnes and Bruus 2012) and acoustic radiation torque (ART) (Fan et al. 2008; Silva et al. 2012), which is significant for non-spherical particles. Second, a global fluid flow is driven by viscous and thermal damping of acoustic waves, the so-called acoustic streaming effect (Nyborg 1953). Besides an acoustically induced fluid flow in the volume, local microstreaming around the particles occurs due to periodic surface deformations (Doinikov 1994; Hahn et al. 2016; Baasch et al. 2019). As a result, acoustic and hydrodynamic forces as well as torques act on the suspended particles depending on their shape.
In devices with tailored acoustic fields, the contactless and label-free manipulation of particle trajectories is used to sort particle mixtures by size (Shi et al. 2009; Ding et al. 2014; Destgeer et al. 2015; Liu et al. 2019) and acoustic contrast factor \(\phi\) (Gupta et al. 1995; Jo and Guldiken 2012; Li et al. 2021). Common acoustic separation devices are categorized by two concepts. On the one hand, a standing acoustic wave field is excited in the fluid bulk within a micro channel of acoustically hard material, known as bulk acoustic wave (BAW) devices (Leibacher et al. 2015). These devices use a frequency in the range of 0.5 MHz to 5 MHz typically, which matches the resonant mode of the fluid cavity (Hahn et al. 2015). On the other hand, surface acoustic waves (SAWs) are used that are excited by interdigital transducers (IDTs) on the surface of a piezoelectric substrate (Ding et al. 2013; Ren et al. 2018; Gao et al. 2020; Fan et al. 2022). In this case, the excitation frequency is not tied to the resonant mode of the fluid cavity and can usually be chosen within a broader MHz range (Li et al. 2022). Once the SAW reaches a fluid-filled micro channel on top of the substrate, energy radiates into the fluid to form a BAW, while leading to an attenuation of the SAW amplitude. These devices use either a single traveling SAW (Destgeer et al. 2014; Collins et al. 2016; Ahmed et al. 2018) or the superposition of counter-propagating SAWs to constitute a standing surface acoustic wave (sSAW) field (Laurell et al. 2007; Ding et al. 2014; Zhao et al. 2020; Wu et al. 2018). The latter causes a pseudo-standing acoustic pressure field containing traveling and standing wave components within the fluid domain, which features periodically arranged pressure nodes and antinodes (Devendran et al. 2016; Barnkob et al. 2018; Sachs et al. 2022a). When suspended particles are present, they are pushed toward the pressure nodes or antinodes by means of the ARF, depending on whether their acoustic contrast factor is positive or negative, respectively (Fakhfouri et al. 2018). The ARF scales with the particle volume and the acoustic contrast factor, which are utilized as separation criteria.

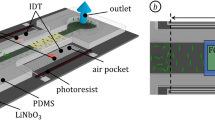
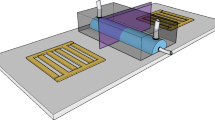
a Schematic representation of the acoustofluidic device with prolate spheroids (green). The micro channel was sealed at the top by a PDMS cover, which has been omitted here for visualization purposes. b Top view displaying the experimentally investigated ROI (blue) and the computational domain (orange) modeled in numerical simulations w.r.t. the coordinate system of the device (color figure online)
Besides separation devices with pressure nodes parallel to the channel side walls (Nam et al. 2011a; Dow et al. 2018; Yang et al. 2018; Richard et al. 2019), so-called tilted-angle sSAW devices are found to achieve a higher selectivity for multiple particle fractions, since the separation distance is extended across multiple pressure nodes (Ding et al. 2014; Li et al. 2015; Wu et al. 2017a, 2018; Liu et al. 2019; Zhao et al. 2020). The amplitude of the ARF is governed by gradients in the acoustic fields, which emerge by the superposition of incident and scattered waves. Especially in tilted-angle sSAW devices, suspended particles may cover a region of significant acoustic gradients. In this arrangement, a dependence of the time-averaged acoustic force \({\varvec{F}}\) on the shape and orientation of non-spherical particles exists (Wijaya and Lim 2015). Hence, an extension of the separation criteria to include the particle shape is conceivable in acoustofluidic devices with tailored design. However, recent studies on the acoustic separation of non-spherical red platelets and exosomes from whole blood (Nam et al. 2011b; Wu et al. 2017b, 2018; Richard et al. 2019; Lin et al. 2020; Nasiri et al. 2020; Ding et al. 2021) still rely on differences in size and the acoustic contrast factor of the samples (Jiang et al. 2022). Besides, a separation by particle shape is a growing field of research involving passive and active methods. For the latter, methods based on electrophoresis and magnetophoresis have been demonstrated (Behdani et al. 2018).
While the acoustophoretic motion of spherical particles has been studied extensively and utilized in Lab-on-a-Chip applications, the prediction of acoustic forces on non-spherical particles remains less understood and is a subject of ongoing research. Analytical solutions were derived for inviscid fluids (Wang and Dual 2012; Silva 2014; Gong et al. 2019; Lima et al. 2020; Leão-Neto et al. 2020, 2021), specific incident waves (Wang and Dual 2011; Gong et al. 2019), and selected particle geometries (Wang and Dual 2011, 2012; Silva et al. 2018; Lima et al. 2020; Leão-Neto et al. 2020, 2021; Jerome et al. 2021). To overcome these limitations, numerical models were developed. A semi-analytical approach was introduced by Lima and Silva (2021), in which monopole and dipole scattering coefficients are numerically calculated for axisymmetric particles. Hahn et al. (2015) developed a three-dimensional numerical model for tracking arbitrarily shaped particles in a standing acoustic field with half-wave resonance using the finite element method. In their model, viscous and thermal boundary layers around the particle are neglected and the velocity field is assumed to be constant across the particle surface. A subsequent study by Hoque et al. (2022) uses this model and reveals that the aspect ratio of an oblate shaped particle affects the ARF only slightly. The contributions of viscous scattering and microstreaming (Hahn et al. 2016) were investigated in the axisymmetric model of Pavlic et al. (2022) for particles of different material and shape in comparable or smaller size as the viscous boundary layer thickness \(\delta _{\mathrm{{v}}}.\) However, due to the restriction to axisymmetric configurations, an analysis on the influence of the particle orientation relative to the incident wave on the ARF is excluded. This relationship was verified in three-dimensional numerical models, assuming an inviscid fluid (Wijaya and Lim 2015; Zareei et al. 2022). Furthermore, a direct influence of the particle shape on the ARF in a standing acoustic wave was found (Wijaya and Lim 2015), although it turns out to be less significant than on the ART (Sepehrirahnama et al. 2021). Besides the widely used finite element method, further progress to calculate the scattered acoustic fields of objects numerically has been achieved by using the T-matrix method (Ganesh and Hawkins 2008; Gong et al. 2019; Ganesh and Hawkins 2022).
Experimental studies on the behavior of non-spherical particles in standing acoustic wave fields comprise the orientation of red blood cells (Jakobsson et al. 2014) and the motion of disk-shaped aluminum microparticles (Garbin et al. 2015). Yamahira et al. (2000) studied the orientation of neutrally buoyant polystyrene fibers in a BAW device with resonance frequencies in the kHz range. Schwarz et al. (2013, 2015) investigated the precise rotation of fibers by modulating the SAW amplitude, phase, frequency, and propagation direction in a two-dimensional standing acoustic wave field.
To investigate the influence of the particle shape as a potential separation criterion, the dynamical behavior of suspended prolate polystyrene spheroids in a pseudo-standing acoustic pressure field with multiple pressure nodes along the channel width W is analyzed in this study. The experimental results with and without pressure-driven main flow enable a statistical analysis of the equilibrium positions and orientations of the particles and significantly extend previous experimental findings. The measurements include variations in the initial position and orientation of the prolate spheroids as well as in the amplitude of the sSAW. With the experiments at hand, a three-dimensional numerical model is developed to evaluate the acoustic force and torque on a suspended particle in a complex pseudo-standing acoustic wave field. By considering gradients in the SAW amplitude, a sound qualitative concurrence with the experimentally observed phenomena is obtained to shed light on the physical mechanisms.
The paper is structured as follows. The methodology of the experimental and numerical investigations is described in Sect. 2. Section 3 includes a discussion on the kinematic behavior of suspended prolate spheroids in an externally imposed main flow (Sect. 3.1) and the influence of the initial position and orientation of the particles on their equilibrium state in a fluid at rest (Sect. 3.2). The findings are complemented by experimental observations during a phase shift of the sSAW in Sect. 3.3 and numerical results on the effect of the particle shape on the acoustic force in Sect. 3.4. Finally, a conclusion and an outlook are given in Sect. 4.
2 Methods
2.1 Acoustofluidic device
The acoustofluidic device features a pair of interdigital transducers (IDTs), which are deposited oppositely on a 500 \(\upmu\)m thick piezoelectric substrate made of \(128^{\circ }\,\text{YX}\,\text{LiNbO}_{3}\) (see Fig. 1). The IDTs consist of periodically arranged finger electrodes with a spacing and width of one quarter of the SAW wavelength \(\lambda _{\mathrm{{SAW}}}={150\,{\upmu \text{m}}}\) and an aperture of \(AP={2\,{\text{mm}}}.\) During fabrication, electron beam evaporation is utilized to deposit a 5 nm layer of titanium as adhesion promoter and a 295 nm layer of aluminum. To prevent mechanical damage and corrosion, the entire chip (excluding the contact pads) is coated with a 385 nm layer of silicon dioxide \((\text{SiO}_{2}).\)
By using a PowerSAW generator (BelektroniG GmbH), an alternating voltage with defined electrical power, phase and frequency \(f=c_s/\lambda _{\mathrm{{SAW}}}\) is applied to the IDTs. Here, \(c_s={3860\,{\text{ms}^{-1}}}\) was taken as resulting phase velocity of the SAW along the crystallographic X-direction of the \(\text{LiNbO}_{3}\) substrate (Sachs et al. 2022a). The elastic surface deformations, that arise due to the inverse piezoelectric effect (Cheeke 2002), superimpose in the region of the IDTs and propagate as Rayleigh waves perpendicular to both sides of the IDTs. A layer of photoresist serves to attenuate the outward propagating waves completely, thus avoiding reflections at the incorporated edges of the chip. The inward propagating waves, in contrast, superimpose between the IDTs to form a complex sSAW field.
A straight micro channel made of polydimethylsiloxane (PDMS, Sylgard 184, Dow Corning) is located centrally between the IDTs. The PDMS was prepared from base and curing agent (10:1) and poured into a negative master mold of silicon. Once the liquid PDMS was exposed to vacuum and degassed overnight at room temperature, it was cured in an oven at 90 \({}^{\circ }\text{C}\) for 25 min. The micro channel features a rectangular cross-section \((500\times 60\) \(\upmu\)m\(^2)\) and air pockets in the region of the IDTs, which reduce the wall thickness to about 500 \(\upmu\)m and hence the energy loss due to attenuation of the SAWs (Kiebert et al. 2017). Furthermore, a single inlet and one outlet were realized by punching through the PDMS ceiling. After placing the micro channel on top of the \(\text{LiNbO}_{3}\) substrate, sealing was ensured by adhesion forces between the PDMS and SiO2-covered \(\text{LiNbO}_{3}.\) Hence, while channel side walls and ceiling were made of PDMS, the substrate closes the micro channel from the bottom. To supply the particle suspension (see Sect. 2.2) at a pulsation-free volume flow, a glass syringe (500 \(\upmu\)l, ILS Innovative Laborsysteme GmbH) and a syringe pump (neMESYS, cetoni GmbH) were used. To reduce sedimentation of the particles in the syringe and stabilize the particle concentration temporally, a ferromagnetic stirrer was used.
As soon as the SAWs reach the particle suspension, part of their energy is radiated as longitudinal bulk acoustic waves (BAWs) into the channel side walls and the fluid. As a result, the SAWs are attenuated along their propagation direction. Due to the superposition of the BAWs within the fluid, a pseudo-standing wave field with stationary pressure nodes parallel to the channel side walls is formed. By considering the speed of sound in the undisturbed fluid \(c_{{{0}}},\) the wavelength of the BAW propagating in the fluid is determined by \(\lambda _{\mathrm{{f}}}=\lambda _{\mathrm{{SAW}}}\, c_{0}/c_{\mathrm{{s}}}\approx {58.16\,{\upmu \text{m}}}.\) The acoustophoretic motion of the suspended particles is determined by the superimposed effects of the acoustic radiation force, the acoustic radiation torque as well as hydrodynamic drag forces and torques due to the acoustically induced and pressure-driven fluid flow (Pavlic et al. 2022).

a SEM image of prolate spheroids dried on a silicon wafer. The region highlighted in orange contains a particle with \(\Gamma <1.8\) that is potentially oriented upright. b Statistical analysis of the aspect ratio \(\Gamma\) of the particles with Gaussian fit. Particles with \(\Gamma <1.8\) (orange) are excluded (color figure online)
2.2 Particle suspension
The prolate spheroids were prepared from spherical polystyrene particles (PS-FluoRed, MicroParticles GmbH) with a monodisperse diameter of \(d_{{{0}}}={5.03\,{\upmu \text{m}}}\) and labeled with fluorescent dye (coumarin, excitation/emission at 530 nm/607 nm). A detailed description on the preparation of the particles can be found in Weirauch et al. (2022).
The rotationally symmetric particles were dried on a polished silicon wafer to capture scanning electron microscopy (SEM) images (see Fig. 2a) and to characterize their shape. Based on the particle detection algorithm described in Sect. 2.4, a statistical analysis was performed on the aspect ratio \(\Gamma =a_{\mathrm{{major}}}/a_{\mathrm{{minor}}},\) where \(a_{\mathrm{{major}}}\) and \(a_{\mathrm{{minor}}}\) are the lengths of the major and minor axes, respectively. The measured aspect ratio follows a Gaussian distribution with a mean value of \(\Gamma _{\mathrm{{m}}}=4.10\) and a standard deviation of \(\sigma _{{{\Gamma }}}=0.75,\) as shown in Fig. 2b. The major axis of the prolate particles thus possesses an average length of \({\bar{a}}_{\mathrm{{major}}}=d_{0} \Gamma _{\mathrm{{m}}}^{\frac{2}{3}}\approx {12.89\,{\upmu \text{m}}},\) which corresponds to \({\bar{a}}_{\mathrm{{major}}}/\lambda _{\mathrm{{SAW}}}\approx 0.09.\) The broad range of \(\Gamma\) results from limitations of the stretching procedure (Weirauch et al. 2022). Furthermore, some particles appear to have an aspect ratio \(\Gamma <1.8,\) as highlighted in Fig. 2a and b. These values were excluded from the statistical analysis since they belong to particles standing upright on the substrate.
During the experiments, the particles were suspended in deionized water with a low concentration of about 1.5 × 106 ml\(^{-1}\) to reduce effects caused by interparticle forces. By adding 0.2 % (v/v) polysorbate 80 (Biorigin), particle-wall interactions and the probability of particle agglomeration were reduced.
2.3 Experimental setup
For the experimental investigation, the acoustofluidic device was mounted on top of an inverted microscope (Axio Observer 7, Zeiss GmbH), which was equipped with a Plan-Neofluar objective (M20x, NA = 0.4, Zeiss GmbH). Measurements were conducted in a region of interest (ROI, see Fig. 1b) of \(457\times 542\) \(\upmu\)m\(^2\) in the xy-plane, centered between the two IDTs at \(y={0\,{\upmu \text{m}}}.\) Since the micro channel spans approx. 500 \(\upmu\)m in width, the narrow regions of 21.5 \(\upmu\)m near the channel side walls were not observed. Initially, the micro channel was flushed with isopropanol and a mixture of deionized water with polysorbate 80 (Biorigin) to reduce the risk of air bubbles and adhering particles at the channel boundaries. The suspended particles were subsequently pumped through the micro channel and illuminated from below through the \(128^{\circ }\,\text{YX}\,\text{LiNbO}_{3}\) substrate by a modulatable OPSL laser \((\lambda _{\mathrm{{laser}}}={532\,{\text{nm}}},\) tarm laser technologies tlt GmbH & Co. KG). The illumination time was adjusted to 500 ns using a function generator (Tektronix UK Ltd.) to avoid particle streaks while ensuring a good signal-to-noise ratio (SNR). A dichroic mirror (DMLP567T, Thorlabs Inc) and a long pass filter (FELH0550, Thorlabs Inc) were placed in the optical path to an sCMOS camera (imager sCMOS, LaVision GmbH, 16 bit, \(2560\times 2160\) pixel) to separate the emitted light of the particles from reflected laser light. The birefringence of \(\text{LiNbO}_{3}\) necessitates the use of an additional linear polarization filter (Kiebert et al. 2017; Sachs et al. 2023) in the detection path to suppress the extraordinary light beam. Two different frame rates were used. While images were captured with a frame rate of 10 Hz to analyze the particle positions and orientations statistically, their dynamical behavior was studied using a higher frame rate of 40 Hz. During the experiments, the focus position was traversed by moving the microscope objective in steps of 5 \(\upmu\)m in positive z-direction to cover the entire channel height. At each measurement plane, 500 images were captured. After the channel ceiling was reached, the measurement was repeated while traversing in negative z-direction. Both results were concatenated to account for the decreasing seeding concentration due to sedimentation of particles in the inlet pipe over the measurement period.

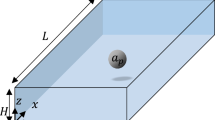
a Global coordinate system to define the position (x, y, z) and orientation \((\varphi ,\theta )\) of a prolate spheroid. b Example of a detected particle image in the xy-plane
2.4 Image processing
The kinematic behavior of the prolate spheroids is characterized by temporal variations in the position (x, y, z) and orientation \((\varphi , \theta )\) of the particles (see Fig. 3). A detection algorithm was initially executed to derive the in-plane coordinates (x, y), the length of the axes \((a_{\mathrm{{major}}},a_{\mathrm{{minor}}})\) and the in-plane angle \(\varphi .\) A detailed description and uncertainty estimation (Rossi 2020) of the particle detection can be found in the supplementary information (SI).
Following the particle detection, a simple particle tracking based on the nearest neighbor method (Cierpka et al. 2013) was successively applied to determine tracks as long as possible and to study the dynamic behavior of the particles. To statistically analyze the complete particle motion in Sect. 3.2 during the onset of the sSAW, only tracks of particles were taken that were detected in frame one, i.e. prior to exciting the sSAW.

Length of the major and minor axis of a prolate spheroid dried on a microscope slide. The corrected length \({\tilde{a}}_{\mathrm{{major}}}\) is subject to less variations across the depth position z
By assuming that an individual particle was fully visible and focused in the xy-plane \((\theta =90^{\circ })\) at least once during the time-resolved tracking, the out-of-plane angle \(\theta\) can be calculated. This assumption was satisfied in good approximation for the relocation of particles, after applying a phase shift to the sSAW (see Sect. 3.3). In this dataset, the out-of-plane angle \(\theta\) was determined by analyzing a sequence of images of the respective particle according to
Here, \({\tilde{a}}_{\mathrm{{major}}}\) and \({\tilde{a}}_{\mathrm{{max}}}\) define the instantaneous and maximum length of the major axis after applying a correction for defocused particle images as follows:
Defocused particle images appear larger, which is evident from a rise in the length of the minor axis \(a_{\mathrm{{minor}}}\) according to \(\delta _{\mathrm{{minor}}} = a_{\mathrm{{minor}}}-a_{\mathrm{{min}}} \ge 0\) in Fig. 4, where \(a_{\mathrm{{min}}}\) is the minimum extend of \(a_{\mathrm{{minor}}}\) during the whole track. However, the length of the major axis \(a_{\mathrm{{major}}}\) is a function of the aspect ratio of the particle and \(\theta ,\) which is considered by the right hand term in Eq. (2). The difference between the major and minor axis was included by \(\delta _{\mathrm{{major}}}=a_{\mathrm{{major}}}-a_{\mathrm{{minor}}}\) and weighted by a fitted parameter \(G=0.15.\) By considering the defocus, the mean absolute error \(\text{MAE}_{\theta }\) of \(\theta\) was reduced by 27.7 % according to an uncertainty analysis based on synthetic images (see Sect. II, SI). A reliable prediction of \(\theta\) with \(\text{MAE}_{\theta }={2.42{^\circ }}\) was achieved within a range of \(\theta _{\mathrm{{GT}}}\in [{18.6{^\circ }},{67{^\circ }}],\) where \(\theta _{\mathrm{{GT}}}\) denotes the ground truth angle. Details on the uncertainty analysis can be found in the SI.
2.5 Estimation of the sSAW field
The normal displacement component of the substrate surface was measured by an ultrahigh-frequency laser Doppler vibrometer (LDV, UHF-120, Polytec). For this, a traveling SAW was excited by applying an AC voltage \((f={25.725\,{\text{MHz}}})\) to one IDT. The laser beam was focused to a circular spot with a diameter less than 2.5 \(\upmu\)m at the substrate surface using a microscope objective (20 × M Plan Apo, NA = 0.42, Mitutoyo). By traversing at a resolution of \(\Delta x = {5\,{\upmu \text{m}}}\) and \(\Delta y = {10\,{\upmu \text{m}}},\) the amplitude and phase of the SAW was determined in a region of \(3.2 \times 1.5\) mm between the two IDTs (see Fig. S2, SI). To ensure unobstructed optical access to the substrate surface, no micro channel was attached to the substrate during the measurement.

Reconstructed normalized amplitude \({\tilde{A}}\) of the sSAW field at the substrate surface covering the fluid domain (see Fig. 1b). The active aperture of the IDTs is highlighted by dashed lines. For visualization, the figure is drawn not to scale
To account for the actual and different phases between both IDT signals and thus a change of the location of pressure nodes and antinodes during the experiments, the resultant sSAW was obtained by superimposing two counter-propagating SAWs. For this, the measured surface displacement was initially smoothed by a Gaussian filter. Subsequently, the traveling SAW was attenuated artificially along its propagation direction, as expected due to energy radiation into the fluid in succeeding experiments (see Sect. III, SI). To reconstruct the sSAW, the measured surface displacement was mirrored at the y-axis and superimposed on the original displacement field (see Fig. 5). This implies identical amplitude profiles and phase positions of the counter-propagating SAWs. Since both IDTs are identical, this assumption is fulfilled to a good approximation. Furthermore, the influence of the channel side walls on the lateral amplitude profile of the SAW was neglected (Weser et al. 2020, 2022). To account for attenuation due to the passage of the channel side walls, the amplitude of the surface displacement was normalized based on experimental results from previous studies (see Sect. III, SI; Sachs et al. 2022a, b).
2.6 Numerical simulation
The acoustic quantities were resolved numerically to shed light on the acoustic and hydrodynamic forces and torques acting on a suspended prolate spheroid. To correctly integrate these quantities on the surface of the non-spherical particle and to capture repercussions on the acoustic fields and the acoustically induced flow, the acoustofluidic device was modeled in three dimensions. The calculation of the acoustic fields is based on perturbation theory (Bruus 2012), under which a quantity g is expanded to the second order:
where zeroth-order quantities (subscript 0) define the undisturbed state. First-order quantities (subscript 1) describe acoustic fields, which possess a periodic time-dependency in the excitation frequency f according to \(g_1({\varvec{x}},t) = g_1({\varvec{x}}) \text{e}^{-i\omega t}\) with \(\omega = 2\pi f.\) Neglecting the viscous boundary layer, the acoustic pressure \(p_1\) in the fluid bulk is given by the Helmholtz equation (4) (Joergensen and Bruus 2021; Joergensen 2022):
Viscous and thermal losses in the bulk of the fluid are covered by the total damping coefficient \(\Gamma _{\mathrm{{f}}},\) which contributes to the complex wave number \(k_{\mathrm{{c}}}.\) Here, \(c_{0},\) \(\rho _{0}\) and \(k^{\textrm{th}}_{0}\) define the speed of sound, density and thermal conductivity in the undisturbed fluid, respectively. The viscosity ratio \(\beta = \mu _{\mathrm{{b}}}/\mu _{0} + 1/3\) is calculated by the shear viscosity \(\mu _{0}\) and bulk viscosity \(\mu _{\mathrm{{b}}}.\) The specific heat capacities at constant pressure \(C_{{{\textrm{p}},0}}\) and volume \(C_{{{\textrm{v}},0}}\) are related by \(\gamma = C_{{{\textrm{p}},0}}/C_{{{\textrm{v}},0}}.\) Once the pressure field \(p_{1}\) is calculated, the first-order velocity field \({\varvec{v}}_{1}\) is given by (Joergensen and Bruus 2021):
using the damping coefficient \(\Gamma _{\mathrm{{s}}} = (1+\beta )\omega \mu _{0}/(2 c_0^2 \rho _0).\) Since boundary layers do not need to be resolved, the required computational effort decreases significantly (Hahn 2015). This approach was validated for the present configuration against a two-dimensional model that incorporates the full set of thermoviscous equations (Sachs et al. 2022a) in the SI.
The attenuation of the BAW in the fluid induces a stationary flow, which is dominated by bulk-driven Eckart streaming in the considered high-frequency SAW system (Lei et al. 2014). Hence, boundary-layer streaming was neglected near the walls of the micro channel and the particle surface. The acoustically excited flow is described by the second-order pressure \(p_{{{2}}}\) and velocity \({\varvec{v}}_{2}\) in the time-averaged (denoted by \(\langle ..\rangle )\) second-order continuity (8) and Navier–Stokes equations (9) for an incompressible fluid (Riaud et al. 2017; Bach and Bruus 2018):
The acoustic body force \({\varvec{F}}_{\mathrm{{ac}}}\) originates from the divergence of the momentum flux density tensor \(-\rho _{0}{\boldsymbol{\nabla}} \langle {\varvec{v}}_{1} {\varvec{v}}_{1} \rangle .\) This term was decomposed into a potential term that can be absorbed in the excess pressure \({\tilde{p}}_{{{2}}}=p_{{{2}}}-1/4(\kappa _{0} |p_{1}|^2-\rho _{0}|{\varvec{v}}_{1}|^2)\) and a body force, which drives the fluid flow (see Eq. (10)) (Riaud et al. 2017). Here, \(\kappa _{0} = 1/(\rho _{0} c_{0}^2)\) is the isentropic compressibility of the fluid. Following this procedure, the numerical convergence is greatly enhanced (Ley 2017). Furthermore, the second-order source term \({\boldsymbol{\nabla}} \langle \rho _{1} {\varvec{v}}_{1}\rangle\) was neglected in the continuity equation, since the flow is assumed to be incompressible (Bach and Bruus 2018; Joergensen and Bruus 2021).
The simulations were conducted with the finite element method in a three-dimensional domain extending over 1.6 mm in y-direction and half of the channel cross-section (see Fig. 1b) using Comsol Multiphysics 6.1 (Comsol Multiphysics GmbH). The computational domain contains a prolate spheroid modeled as a linear elastic solid. Details on the governing equation in the solid domain, boundary conditions, material properties, and a mesh independence study can be found in the SI. The acoustic force \({\varvec{F}}\) and torque \({{\varvec{T}}}\) are expressed by integrating over the particle equilibrium surface \(S_{0}\) according to (Doinikov 1997; Karlsen 2018; Dual et al. 2012):
where \({\boldsymbol{\sigma}}_{2}=-p_{{{2}}}{\varvec{I}}+\mu _{0}[{\boldsymbol{\nabla}}{\varvec{v}}_{2}+({\boldsymbol{\nabla}}{\varvec{v}}_{2})^{\textrm{T}}]\) denotes the second-order stress tensor, \({\varvec{I}}\) the unit tensor, \({\varvec{n}}\) the outward pointing normal vector at the particle surface and \({\varvec{r}}\) the vector pointing from the center of mass to the surface \(S_{0}.\) Since the seeding density remains low throughout this study, interparticle forces such as the secondary Bjerknes force are neglected (Doinikov 2001; Sepehrirahnama et al. 2015). The hydrodynamic influence of the acoustically induced flow is included in the time-averaged acoustic force \({\varvec{F}}\) and torque \({\varvec{T}}\) by \({\boldsymbol{\sigma}}_{2}.\) Hence, the calculated force \({\varvec{F}}\) is the total time-averaged mean force on the particle, which defines the dynamic behavior of the prolate spheroid in the absence of an externally imposed velocity field \({\varvec{v}}_{0}.\) The numerical calculations were performed in parallel batch jobs on a high-performance computing cluster with AMD EPYC 7601 (2.2 GHz) processors and up to 2 TB of random-access memory (RAM).
3 Results and discussion
3.1 Kinematic behavior of prolate spheroids suspended in a micro flow
The kinematic behavior of prolate spheroids suspended in a pressure-driven channel flow was statistically analyzed based on 24349 detected particle positions and orientations. For this, the particles were pumped through the micro channel at a constant volume flow rate of 0.75 \(\upmu\)l/min. Adherent particles with a displacement below two pixel in main flow direction between two frames were discarded. Without a superimposed sSAW, particles were almost evenly distributed across the channel width, as illustrated in Fig. 6a. An exception was the higher particle occurrence close to the channel side wall at \(x/\lambda _{\mathrm{{SAW}}}\approx -3/2\). This was due to the flow redirection at the inlet, which leads to a displacement of sedimented particles toward the left channel side wall. Migration of spheroids to stable equilibrium positions due to lift forces (Tai et al. 2020a; Tai and Narsimhan 2022; Lauricella et al. 2022) was not observed since the mean traveling time from the inlet to the ROI was just about 12 s. The relative amount of detected particles in the respective measurement plane is shown in Fig. 6c. As a result of sedimentation in the micro channel caused by the density difference between the particles \(\rho _{\mathrm{{p}}}\) and fluid \(\rho _{0}<\rho _{\mathrm{{p}}},\) the amount of particles increased towards the channel bottom.

Histogram of the position of detected spheroids without (a) and with (b) sSAW along the channel width. c Relative number of particles found in the measurement planes along the depth direction z. The electrical power to excite the sSAW amounts to 102 mW

Relative frequency of the detected in-plane angle \(\varphi\) along the depth direction z without (a) and with (b) sSAW. The balance between acoustic forces and gravity led to a different height distribution of the particles for both cases. The measured \(\varphi\) across all measurement planes is depicted as histogram without and with sSAW in c and d, respectively. Black arrows indicate the main flow direction relative to the prolate spheroids in preferred orientation
With superimposed sSAW, the spheroids were focused to stable positions in the vicinity of the pressure nodes (distance \(\lambda _{\mathrm{{SAW}}}/2)\) and levitated along the channel height (see Fig. 6b and c). The stable positions resulted from the dynamic equilibrium of gravity, the drag force due to the acoustically induced flow and the acoustic radiation force, which depends on the complex geometry of the acoustic fields (see Fig. S4a, SI). Due to the depth of field of the optical setup, gradients in the particle distribution in z-direction were smeared, which led to a broad scattering around the preferred particle position at \(z\approx\) 21.4 \(\upmu\)m or \(z/\lambda _{\mathrm{{f}}}\approx 0.368\).

Relative amount of particles that were focused to a stable position close to a pressure node and to an orientation \(\varphi =(180 \pm 10){^\circ }\) as a function of the applied electrical power \(P_{\mathrm{{el}}}\)

a Experimentally detected prolate spheroids at initial (green) and final (blue) position and orientation. Detected particle image contours appear larger as the corresponding particle image is defocused. The tracked particle paths leading to stable positions near the pressure nodes (black dashed lines) are indicated by red lines. b The normalized relative position \(\vert x-x_{\mathrm{{final}}}\vert /\lambda _{\mathrm{{SAW}}}\) and in-plane angle \(\varphi\) of a single particle are shown as a function of time t, where \(x_{\mathrm{{final}}}\) is the final position of the particle. Snapshots of the selected particle are depicted above at specific time instants b1 to b4. The selected particle can be found in the pink frame in a with its initial position, final position and particle path highlighted in orange, yellow and black, respectively. c Final in-plane angle \(\varphi _{\mathrm{{final}}}\) of all particles as a function of the initial orientation \(\varphi _{\mathrm{{initial}}}\) with the associated histogram illustrated in d (color figure online)
In the absence of the sSAW, the suspended spheroids were preferentially oriented in main flow direction at \(\varphi \approx 90^{\circ },\) as reflected by the probability distribution of \(\varphi\) in Fig. 7a and c. Furthermore, the particles performed typical tumbling, kayaking or logrolling motions, which are well described through experimental and numerical studies (Lauricella et al. 2022; Tai et al. 2020a, b; Tai and Narsimhan 2022; de Timary et al. 2022). However, tumbling motion occurred most frequently for particles which were oriented at \(\varphi \approx 90^{\circ }\) for most of the time until performing a fast rotation in the xy- or yz-plane. As a consequence of the transient motion, the probability distribution of \(\varphi\) appears rather broadly distributed (see Fig. 7c). The motion pattern and frequency of rotation is further depended on the aspect ratio and particle velocity as shown in Fig. S6 (SI) and Fig. S7 (SI), respectively. When the particles were exposed to the standing acoustic wave field, they were aligned either close to \(\varphi ={90{^\circ }}\) or \(180^{\circ },\) while transient motions like tumbling were suppressed (see Fig. 7b and d). However, an orientation perpendicular to the main flow direction at \(\varphi \approx {180{^\circ }}\) was preferred due to the influence of the applied torque \({\varvec{T}}.\) This preferred orientation persisted over the entire channel height and aspect ratio range, while only \(3.0~\%\) of the particles were oriented at \(\varphi \approx {90{^\circ }}.\) These few particles faced at \(90^{\circ }\) before being exposed by the acoustic pressure field and retained their orientation. Interestingly, two distinct peaks appear at \(\varphi \approx (180.0 \pm 2.5)^{\circ }\) in Fig. 7d. It is suspected that hydrodynamic torques due to the main flow caused this slight tilt relative to \(\varphi \approx {180{^\circ }}.\) A small fraction of about \(5.4~\%\) of the detected particles featured an apparent aspect ratio below 1.2. These were discarded, since it remains uncertain whether they possess an almost spherical shape or were oriented parallel to the observation direction along the z-axis.
However, the vast majority of the detected particles were oriented perpendicular to the pressure nodes of the sSAW at \(\varphi =(180 \pm 10)^{\circ },\) which was confirmed in independent experiments with various acoustofluidic devices with identical parameters. This finding is in contrast to previous experimental and numerical studies on the behavior of elongated particles in pseudo-standing acoustic wave fields (Schwarz et al. 2013, 2015; Hahn et al. 2015; Garbin et al. 2015; Leão-Neto et al. 2020; Lima et al. 2020; Zareei et al. 2022). Potential reasons for the difference in the preferred orientation are discussed in detail in Sect. 3.2.
The dynamic equilibrium in the position and orientation of the prolate spheroids depends on the amplitude of the acoustic fields. The scale of these first-order quantities is specified by the applied electrical power \(P_{\mathrm{{el}}},\) which was varied in a series of experiments. According to Fig. 8, the fraction of focused particles \(N_{{{\textrm{p}},{\textrm{focused}}}}\) out of the total number of detected particles \(N_{\mathrm{{p}}}\) increased with \(P_{\mathrm{{el}}}.\) However, a difference between spatial focusing (position) and orientation to \(\varphi = (180\pm10){^\circ }\) existed, see also Fig. S8 (SI). A higher fraction of particles was forced close to the pressure nodes than aligned perpendicular to the flow direction for low power \(P_{\mathrm{{el}}}< {50\,{\text{mW}}}.\) With higher power, the number of particles aligned to \(\varphi = (180\pm 10){^\circ }\) approached the number of particles focused close to pressure nodes. Hence, the relative dominance between the hydrodynamic torque due to the main flow and the acoustic torque \({\varvec{T}}\) has a significant influence on the kinematic behavior of the spheroids, especially at low \(P_{\mathrm{{el}}}.\)
3.2 Reorientation with arbitrary initial positioning and orientation
The experimental observations in Sect. 3.1 revealed a non-intuitive orientation of the prolate spheroids perpendicular to the pressure nodes at \(\varphi = (180\pm10){^\circ }.\) In contrast to previous studies (Schwarz et al. 2013, 2015; Hahn et al. 2015; Garbin et al. 2015), a pressure-driven flow was externally imposed, which may affect the equilibrium orientation of the particles due to an additional hydrodynamic torque. To eliminate the influence of the superimposed main flow, experiments with suspended spheroids in a quiescent fluid are discussed below.

Numerically calculated normalized time-averaged absolute acoustic pressure (a) and normalized second-order velocity (b) in the half channel cross-section with a symmetry condition at the right boundary. The prolate spheroid with an aspect ratio of \(\Gamma =4.1\) is illustrated in white. The pressure distribution across the surface and the velocity field in the vicinity of the particle is depicted in d and e, respectively. In c, the normalized velocity component \({\tilde{v}}_{{{2}}}\) is given in the yz-plane. Arrows and the dashed line indicate the direction of \({\tilde{v}}_{{{2}}}\) and the beginning of the IDTs, respectively. Please note, that subfigure c is not to scale
Experiment For these experiments, the particle suspension was initially pumped to the ROI using a syringe pump before the main flow was switched off. Pinch valves at the inlet and outlet tubing suppressed a potential background flow due to hydrodynamic capacities and pulsations caused by the magnetic stirrer to a minimum. Since the sSAW was still switched off during pumping, the particles were in arbitrary positions and orientations. According to the distribution of the particles with superimposed sSAW, the measurement height position was chosen around \(z= {26.6\,{\upmu \text{m}}}.\) An sSAW \((P_{\mathrm{{el}}}={71.2\,{\text{mW}}})\) was superimposed after approx. 2 s and the positioning and orientating behavior of the particles was recorded with a frame rate of 40 Hz. To observe the particle behavior over the entire ROI, the experiment was repeated multiple times. During post-processing, particle tracks were considered valid if they extend over 90 % of the total recording time and if the respective particle was detected in the first frame. In this way, a statistical analysis of the initial and final orientation at the end of the track is feasible.

a Normalized acoustic torque about the z-axis \({\tilde{T}}_{z}\) versus the in-plane angle \(\varphi\) as a result of numerical simulations. The data is fitted by a Fourier series up to 4th order. The local acoustic torque \({\tilde{T}}_{z,{\textrm{local}}}\) on the particle surface is shown for different orientations (highlighted by dashed lines in a) in a1–a3. The direction of the resulting torque is indicated by curved arrows
The result of the experiments is illustrated in Fig. 9a, in which green and blue particle image contours indicate the initial and final position and orientation of the corresponding particles, respectively. Strongly defocused particle images appear larger than anticipated for the corresponding particle. The arbitrary positioning of the prolate spheroids at the beginning of the measurement quickly vanished after the sSAW was superimposed. Due to the acoustic force \({\varvec{F}},\) the particles were focused near the closest pressure node (dashed lines). The trace of the particles is indicated by red lines. The kinematic motion of a selected particle is depicted in Fig. 9b as a function of time t. Initially, this particle was located at a distance of about \(0.217\,\lambda _{\mathrm{{SAW}}}\) (32.5 \(\upmu\)m) from the nearest pressure node. Shortly after the sSAW was excited, the particle approached its final position while a rapid reorientation occurred near the pressure node. Such fast reorientation agrees well with the observations on the motion of a alumina platelet by Hahn et al. (2015). However, the major axis of the prolate spheroid was oriented perpendicular to the pressure nodes of the sSAW in the final frame, which is in contrast to the orientation of the alumina platelet.
Although the selected particle was initially aligned at \(\varphi \approx {85{^\circ }}\) (265\(^\circ\) for visualization in Fig. 9b), the same final orientation was reached as was dominant with superimposed main flow in Sect. 3.1. This outcome is confirmed by the statistical analysis of the final in-plane angle \(\varphi _{\mathrm{{final}}}\) as a function of the initial orientation \(\varphi _{\mathrm{{initial}}}\) in Fig. 9c and d. Independent from the initial orientation of the particles, 96.4 % of the validly tracked spheroids exhibited a final orientation at \(\varphi =(180 \pm 10){^\circ }.\) Consequently, the non-intuitive orientation of the prolate spheroids perpendicular to the pressure nodes of the sSAW was not a result of a hydrodynamic torque due to the main flow.

Normalized acoustic torque components \({\tilde{T}}_{z,{\textrm{I}}}\) and \({\tilde{T}}_{z,{\textrm{II}}}\) about the z-axis as a function of the in-plane angle \(\varphi\) obtained from numerical simulations. The data is normalized by the maximum of \(T_{z,{\textrm{I}}}\) and fitted by smoothing splines

Evolution of the detected position, in-plane angle \(\varphi\) and out-of-plane angle \(\theta\) of two selected particles (a, b) during a periodic phase shift of the SAW. The depicted curves are averaged over two full periods. The gray shaded regions indicate the duration \(t_{\mathrm{{f}}}\) in which the particles remained in an orientation \(\theta <{40{^\circ }}.\) Images of the two particles are shown for different time instants in a1–a5 and b1–b5, respectively. Please note, that \(\varphi\) is reduced by 90\(^\circ\) for visualization
Numerical simulation To shed light on the acoustic force \({\varvec{F}}\) and torque \({\varvec{T}}\) acting on the particles, three-dimensional numerical simulations were conducted. The numerical model replicates the experimental conditions and involves a prolate spheroid that acts as an acoustic discontinuity scattering incident waves. Multiple stationary pressure nodes and antinodes are revealed along the channel width based on the calculated time-averaged absolute first-order pressure in Fig. 10a. Considering the experimental observations, the suspended particle (white ellipse) was placed close to a pressure minimum. Due to the superposition of incident and scattered BAWs, an affect on the acoustic pressure field occurred only locally around the particle, while the global pressure field remained unaffected. The second-order velocity field is composed of periodically arranged vortex structures (see Fig. 10b), which agree well with experimental studies (Sachs et al. 2022a). Similar to the first-order pressure field, the acoustically induced fluid flow was deflected solely in the immediate vicinity of the particle, as illustrated in the detailed view in Fig. 10e.
Gradients in the SAW amplitude gave rise to three-dimensional vortices with velocity components in the yz-plane (see Fig. 10c). These were most significant at the outer regions of the sSAW (\(y/AP\in \,[-0.55,-0.25]\); Sachs et al. 2022b), although they persisted toward the center of the sSAW. Both gradients along the y-direction in the acoustic fields and the superimposed second-order fluid flow can affect the resulting orientation of the particle. However, a far greater velocity in y-direction \(v_{{{2}}}\) appeared in the vicinity of the particle as a result of the flow deflection than by the globally driven flow. Since the prolate spheroid covered significant gradients in the pressure and velocity field (Fig. 10d and e), the calculation of \({\varvec{F}}\) and \({\varvec{T}}\) was performed by numerical integration over the equilibrium surface \(S_{0}\) of the particle. The out-of-plane angle \(\theta\) was set constant at 90\(^\circ ,\) since it cannot be obtained from the experimental results.
The numerically calculated normalized acoustic torque around the z-axis \({\tilde{T}}_{z}\) is depicted in Fig. 11a as a function of the in-plane angle \(\varphi .\) For \(\varphi <{90{^\circ }},\) \({\tilde{T}}_{z}\) is negative. The particle thus tends to rotate towards a declining \(\varphi ,\) as illustrated in Fig. 11a by the normalized local torque \({\tilde{T}}_{z,{\textrm{local}}}\) at \(\varphi ={30{^\circ }}\) (position a1). The situation reverses for \(\varphi >{90{^\circ }}\) since \({\tilde{T}}_{z}\) features positive values and the prolate spheroid tend to rotate to larger \(\varphi\) (see Fig. 11a, position a3). Hence, a stable orientation exists at \(\varphi = {0{^\circ }}\) or \(\varphi ={180{^\circ }}\) as \({\tilde{T}}_{z}\) intersects the abscissa from positive to negative values.
The curve of \({\tilde{T}}_{z}\) flattens progressively when approaching \(\varphi = {90{^\circ }}\) until another zero crossing occurs with symmetric distribution of \({\tilde{T}}_{z,{\textrm{local}}}\) across the particle surface (see Fig. 11a, position a2). However, this orientation with \({\tilde{T}}_{z}=0\) remains unstable, since small deviations in \(\varphi\) result in an orientation to \(\varphi ={0{^\circ }}\) or \(\varphi ={180{^\circ }}.\) This finding contrasts with previous numerical studies of the acoustic torque on elongated particles, although the ratio of the equivalent particle diameter \(d^*\) to the wavelength of the SAW was in a similar range at about 0.0335 (Schwarz et al. 2013; Wijaya and Lim 2015; Schwarz et al. 2015; Zareei et al. 2022). An orientation of polystyrene fibers with \(\lambda _{\mathrm{{f}}}/4<a_{\mathrm{{major}}}<\lambda _{\mathrm{{f}}}/2\) perpendicular to the pressure nodes of a BAW device with resonance frequencies in the kHz range was observed experimentally by Yamahira et al. (2000). However, the fibers were located at antinodes while the radiation pressure was balanced at both ends of the fibers, which contrasts with the observations in this study, too. To explore the behavior of the prolate spheroids in more detail, the acoustic torque is decomposed into two parts: \({\varvec{T}}={\varvec{T}}_{\mathrm{{I}}}+{\varvec{T}}_{\mathrm{{II}}}.\) Here, \({\varvec{T}}_{\mathrm{I}} = \int _{S_{0}}{{\varvec{r}} \times \langle {\boldsymbol{\sigma}}_{2}\rangle \cdot {\varvec{n}}\,{\textrm{d}}S}\) stems from the second-order stress tensor and \({\varvec{T}}_{\mathrm{II}} = - \rho _{0}\int _{S_{0}}{{\varvec{r}} \times \langle {\varvec{v}}_{1}{\varvec{v}}_{1}\rangle \cdot {\varvec{n}}\,{\textrm{d}}S}\) from the momentum flux tensor according to Eq. (12). As visualized in Fig. 12 for the normalized z-component \({\tilde{T}}_{z}\) across the in-plane angle \(\varphi ,\) both parts act in opposite directions. However, the torque \({\tilde{T}}_{z,\text{I}}\) resulting from \({\boldsymbol{\sigma}}_{2}\) exhibits a larger amplitude and determines the stable orientation of the prolate spheroid at \(\varphi ={0{^\circ }}\) or \(\varphi = {180{^\circ }}\) in the considered device. This indicates the importance of the second-order pressure and velocity fields, which are locally affected by scattering effects in the vicinity of the prolate spheroid. The stable orientation of the prolate spheroid perpendicular to the pressure nodes of the sSAW predicted by numerical calculations based on the acoustic torque agrees very well with the experimental observations.
3.3 Translational and rotational dynamics during phase shifting
Experiment The transient behavior of prolate spheroids exposed to a standing acoustic pressure field of three-dimensional nature is very complex, especially due to arbitrary initial positions and orientations of the particles. To analyze the dynamic behavior of the particles systematically, the initial conditions were established in a controlled manner by a continuous excitation of an sSAW. The position of the pressure nodes was periodically shifted by imposing a phase shift of \(\pi .\) Since the particles were forced to stable positions close to the pressure nodes, a transient displacement of the particles by about \(\lambda _{\mathrm{{SAW}}}/4\) in x-direction was initiated. A statistical analysis is based on repeated experiments with a total number of 400 detected particle tracks.
The typical particle motion during a period is depicted in Fig. 13 for two selected particles, representing the characteristic behavior. The curves were averaged over two full periods with a duration of \(T={10\,{\text{s}}}.\) By applying the phase shift, both particles were shifted to stable positions and subsequently returned to their initial position as expected. The distance between the stable positions was determined by the pattern of the acoustic fields and resultant fluid flow, which varied along the channel width. Hence, the normalized traveling distance \(|x-x_{\mathrm{{initial}}}|/\lambda _{\mathrm{{SAW}}}\) varied between both examples. During the cyclic translation, the particle in Fig. 13a performed a rotation in the xz-plane, as illustrated by the particle images (a1–a5) that temporarily approach a round contour in a2 and a4. This behavior was captured by the detected out-of-plane angle \(\theta .\) Please note that the minimum angle to be calculated amounts to about \(24.8^\circ\) in this case, although the actual out-of-plane angle might be lower (see Sect. 2.4). The particle started to rotate simultaneously to the translation, however, the rotation ended prior to reaching the final position. The duration in which the particle was oriented at \(\theta <{40{^\circ }}\) is highlighted in gray and defined as \(t_{\mathrm{{f}}}.\) Concurrently, the in-plane angle \(\varphi\) was affected marginally and remained at \((180\pm 12)^{\circ }.\) After the first translation within \(t/T\le 1/3,\) a stationary regime was reached, in which \(\theta\) exceeded its initial value. This condition was typically found for particles shifting from the center of the micro channel toward the channel side walls, i.e. \(\partial |x|/\partial t>0.\)

Distribution of the duration \(t_{\mathrm{{f}}}\) in which particles outside the center of the channel \((|x|/\lambda _{\mathrm{{SAW}}} > 0.467)\) possessed an out-of-plane angle \(\theta <{40{^\circ }}\) for translations toward the center \((\partial |x|/\partial t<0)\) and the side walls \((\partial |x|/\partial t>0)\) of the micro channel
In contrast, the particle depicted in Fig. 13b did not rotate to \(\theta \rightarrow {0{^\circ }}\) during the first phase shift and \(\theta\) was reduced in the stationary regime at \(t/T = 1/2.\) However, when the particle was shifted back to the initial position, a rotation occurred and \(\theta\) reached the initial value. This behavior was commonly observed outside the center of the channel \((|x|/\lambda _{\mathrm{{SAW}}} > 0.467)\), where \(\theta\) decreased in a series of translations without rotation. Consequently, the out-of-plane orientation of the prolate spheroids is depended on the preceding motion pattern and the position along the channel width.
During the second translation within \(t/T>2/3,\) the particle depicted in Fig. 13b remained in an orientation with \(\theta <{40{^\circ }}\) for a longer duration \(t_{\mathrm{{f}}}\) than the particle in Fig. 13a. To evaluate this trend statistically, the duration \(t_{\mathrm{{f}}}\) is depicted in Fig. 14 for particles outside the center of the channel \((|x|/\lambda _{\mathrm{{SAW}}} > 0.467)\). It applies that the mean duration \(\bar{t_{\mathrm{{f}}}}\) increased from about 0.25 s to 0.39 s as the particles were moving toward the channel side wall \((\partial |x|/\partial t>0)\) instead of moving toward the channel center \((\partial |x|/\partial t<0)\). This correlation is affected by the pattern of the acoustic fields, which included elongated antinodes close to the side walls (see Fig. 10a). The similar effect was less pronounced near the channel center.

Averaged particle velocity u in x-direction and averaged out-of-plane angle \(\theta\) for motion patterns with and without rotation. If no rotation to \(\theta <{40{^\circ }}\) was performed, the particles first aligned parallel to the xy-plane \((\theta >{60{^\circ }})\) and subsequently turn to the final orientation. The error bars indicate the standard deviation of the averaged particle velocity and out-of-plane angle
The different motion patterns were utilized to analyze the dynamic behavior of the particles in relation to their orientation. For this, the average translational velocity component u and the out-of-plane angle \(\theta\) are compared for particles with and without rotation to \(\theta <{40{^\circ }}\) during a phase shift in Fig. 15. To calculate the averaged velocity u and angle \(\theta ,\) only particles close to the center of the micro channel and performing a translation toward the center \((\partial |x|/\partial t<0)\) were used. Furthermore, rotating particles were only considered if they rotated directly at the onset of the translation and for a duration \(t_{\mathrm{{f}}}<{0.25\,{\text{s}}}.\) In total, 51 valid particle tracks were used. The particles were initially accelerated until the peak velocity was reached for both motion patterns. Subsequently, the velocity decreased as the particles approached their final position. When a particle did not rotate to \(\theta <{40{^\circ }},\) a higher translational velocity was reached during the acceleration phase. The difference in u particularly increased in the region \(|x-x_{\mathrm{{initial}}} |/\lambda _{\mathrm{{SAW}}} \in [0.01,0.06],\) where the rotating particle was aligned almost perpendicular to the direction of motion. The higher velocity of the non-rotating particles may be caused by a larger acoustic force \({\varvec{F}}\) and a lower hydrodynamic drag. Although an effect of the particle orientation on the dynamics is found, these physical mechanisms cannot be separated based on the experimental observation.

a Normalized acoustic force component \({\tilde{F}}_{x}\) as a function of the particle position in x-direction. Numerical results were derived for a prolate spheroid aligned in the xy-plane \((\theta ={90{^\circ }})\) or yz-plane \((\theta ={0{^\circ }}).\) The data is fitted by smoothing splines and the positions of pressure nodes (PN) and antinodes (AN) are highlighted in orange. The local force component \({\tilde{F}}_{x,{\textrm{local}}}\) acting on the particle surface is given in b and c for particles located at \(x/\lambda _{\mathrm{{SAW}}}=-0.63\) (marked by the black dashed line in a)
Numerical simulation To establish a deeper insight into the influence of the acoustic force \({\varvec{F}}\) on the dynamical behavior of the particles, numerical calculations were performed. The normalized force component in x-direction \({\tilde{F}}_{x}\) is shown in Fig. 16a for a particle located at various x-positions between neighboring pressure nodes and at a height \(z={25\,{\upmu \text{m}}}.\) To match the experimental conditions, prolate spheroids oriented in the xy-plane \((\varphi ={0{^\circ }},\,\theta ={90{^\circ }})\) or in the xz-plane \((\varphi ={0{^\circ }},\,\theta ={0{^\circ }})\) were compared. Independent of the orientation, a negative force is acting on the particles, as they leave the stable position at \(x/\lambda _{\mathrm{{SAW}}}\approx -0.73\) toward the channel center \((x/\lambda _{\mathrm{{SAW}}}=0).\) The force component \({\tilde{F}}_{x}\) vanishes when the particles reach an unstable equilibrium near the antinode at \(x/\lambda _{\mathrm{{SAW}}}\approx -0.57.\) Further toward the center of the channel, \({\tilde{F}}_{x}\) take positive values until a new stable position is reached at \(x/\lambda _{\mathrm{{SAW}}}\approx -1/3.\) This position is at a distance of about 11 \(\upmu\)m from the nearest pressure node. However, a shallow valley was formed around this pressure node in the pattern of the time-averaged absolute pressure field \(\langle |p_{1}|\rangle\) depicted in Fig. 10a, which led to a small acoustic force and permitted the distance of the stable position from the pressure node due to the acoustically induced flow. The pattern of \(\langle |p_{1}|\rangle\) further led to a negative peak of \({\tilde{F}}_{x}\) exceeding the positive peak at \(x/\lambda _{\mathrm{{SAW}}}\approx -1/2\) in magnitude.
The maximum of the absolute local acoustic force component \(|F_{x,{\textrm{local}}}|\) acting on the equilibrium particle surface \(S_{0}\) is significantly larger for a spheroid oriented at \(\theta ={0{^\circ }}\) (see Fig. 16b and c). However, the orientation of the prolate spheroid affected the resulting force component \(F_{x}\) only marginally after integrating \(F_{x,{\textrm{local}}}\) across \(S_{0}.\) Close to the minimum (see inset in Fig. 16a), \(F_{x}\) was about 7.3 % larger for an orientation at \(\theta ={0{^\circ }}\) than at \(\theta ={90{^\circ }}.\) By neglecting the particle inertia and applying Newton’s second law, the particle velocity u in x-direction is determined as \(u=F_{x}/L_{x}.\) Here, \(L_{x}\) is the hydrodynamic drag coefficient in x-direction. Following the numerical simulations of Hahn et al. (2015), \(L_{x}\) was increased by about 33 % when the prolate spheroid was oriented at \(\theta ={0{^\circ }}\) instead of \(\theta ={90{^\circ }}.\) Consequently, the numerically determined particle velocity is about 18.8 % larger for a particle oriented at \(\theta ={90{^\circ }},\) which is in good agreement with the experimental findings (see Fig. 15).

a Normalized acoustic force component \({\tilde{F}}_{x}\) against the x-position of a prolate spheroid \((\varphi ={0{^\circ }})\) and a sphere with identical volume. The data is fitted by smoothing splines and the positions of pressure nodes (PN) and antinodes (AN) are highlighted in orange. In b and c, the local force component \({\tilde{F}}_{x,{\textrm{local}}}\) is depicted for particles at \(x/\lambda _{\mathrm{{SAW}}}=-0.63\) as indicated by the black dashed line in a
3.4 Effect of particle shape on the acoustic force \({\varvec{F}}\)
To achieve an acoustic separation by particle shape in radiation dominated devices, differences in the acoustic force component \({\tilde{F}}_{x}\) are necessary. Utilizing the numerical model at hand, the acoustic force in x-direction is compared for the case of a prolate spheroid \((\varphi ={0{^\circ }},\,\theta ={90{^\circ }})\) and a sphere with identical volume. As depicted in Fig. 17, the normalized force component \({\tilde{F}}_{x}\) takes a similar course between two neighboring pressure nodes as described for prolate spheroids with different orientations in Sect. 3.3. In the proposed device, the maximum of the applied force on the prolate spheroid is about 7.8 % lower than on the sphere. Hence, a very sensitive setting of the hydrodynamic drag force is required to yield a reliable acoustic separation in, e.g. tilted-angle sSAW devices.

a Normalized acoustic force component \({\tilde{F}}_{x}\) calculated for the same particles as in Fig. 17. The data is fitted by smoothing splines. At the channel ceiling, an acoustic impedance for glass is adopted. b Normalized time-averaged absolute pressure \(\langle |{\tilde{p}}_{1}|\rangle\) across the channel cross section. The prolate spheroid \((\varphi ={0{^\circ }})\) is indicated in white at a stable position. Please note that the channel center is located at \(x/\lambda _{\mathrm{{SAW}}}=0\)
However, acoustofluidic devices with tailored designs recently achieved an enhanced selectivity and throughput for the separation by particle size. Incorporating a glass lid at the channel ceiling, for instance, increased the reflectance of the BAW (Wu et al. 2018; Ang et al. 2023). In this way, the amplitude of the first-order pressure increased and the pseudo-standing wave field became more regular, as shown in Fig. 18b. In the corresponding numerical model, the acoustic impedance of glass \((Z_{\mathrm{{glass}}}={12\,{\text{MPa}\,\text{s}/\text{m}}},\) Wu et al. 2018) was adopted at the channel ceiling. The sphere with identical volume expanded further in z-direction than the prolate spheroid, while gradients in the acoustic fields were promoted in the same direction as well. Consequently, the difference in the amplitude of \({\tilde{F}}_{x}\) between the prolate spheroid and the sphere rose to about 19.8 % (see Fig. 18a). This greatly facilitates acoustic separation by particle shape and underlines the demand for tailored devices with carefully selected materials. Interestingly, the particles were forced to a stable position between adjacent pressure nodes in x-direction and between neighboring antinodes in z-direction (see Fig. 18b), which is in contrast to using a PDMS lid. This is due to the effect of the second-order stress tensor in the calculation of the acoustic force according to Eq. (11).
4 Conclusion
In this study, the dynamic behavior of suspended prolate spheroids exposed to a pseudo-standing acoustic wave field is investigated experimentally and numerically. The wave field comprises multiple pressure nodes along the channel width by superimposing two counter-propagating surface acoustic waves (SAW), as typical for high-frequency acoustofluidic devices. Experimental observations reveal a suppression of the tumbling motion of prolate spheroids in a pressure-driven micro flow by means of the acoustic force \({\varvec{F}}\) and torque \({\varvec{T}}.\) As the amplitude of the SAW increases, the particles are forced to stable trapping positions in the xz-plane given by the equilibrium of acoustic and hydrodynamic forces. However, the particles are aligned non-intuitively with the major axis perpendicular to the pressure nodes of the standing surface acoustic wave field (sSAW, \(\varphi = (180\pm10){^\circ })\). This orientation further persists in the absence of an externally driven main flow, regardless of the initial position and orientation of the particles. A deeper insight into the physical mechanisms is established by the developed three-dimensional numerical model, which allows to draw conclusions on the acoustic and hydrodynamic force and torque for arbitrarily shaped particles. Here, reliable numerical results are found for prolate spheroids that are large compared to the gradients in the acoustic fields and the acoustically induced flow originating from SAWs of 150 \(\upmu\)m wavelength. By integrating the acoustic force and torque over the surface of the prolate spheroid, the experimentally observed non-intuitive orientation of the particles perpendicular to the pressure nodes is confirmed. Moreover, the numerical analysis reveals the importance of the second-order pressure and velocity fields.
Two typical motion patterns are observed during a well controlled particle translation, induced by a \({180}^\circ\) phase shift of the sSAW. Simultaneously to the translation along the channel width, the particles align their major axis either temporarily along the z-axis or remain in the xy-plane. According to the experimental result obtained by many particles forced to move by a phase shift in a repeated manner, the velocity of the particle differs, depending on the actual motion pattern and indicating an orientation dependent dynamical behavior.
In addition, numerical calculations show that the acoustic force is only marginally dependent on the orientation and shape of the particle. Hence, neither the orientation nor the shape of the particles would allow a separation of particles within the device under investigation, i.e. a sSAW device with a micro channel made of polydimethylsiloxane (PDMS). However, by introducing a glass lid at the channel ceiling, the acoustic force on a prolate spheroid is about 19.8 % higher than on a sphere of equal volume. This large difference may allow a separation depending on the particle shape. Furthermore, the numerical model provides an effective tool to predict the acoustic force and torque in complex three-dimensional acoustic fields and acoustically induced fluid flows for arbitrary shaped particles. It is possible to extend the proposed model, taking also the electric field of the SAW and temperature gradients within the fluid into account. In this way, a comprehensive numerical model includes the dielectrophoretic force and torque as well as thermally driven flows, which might superimpose the acoustophoretic motion of the particles. Nevertheless, making use of the validated numerical model presented herein already allows for tailoring acoustofluidic devices in terms of their ability to separate particles based on their shape.
Availability of data and materials
The full data sets that support the findings of this study are available from the corresponding author, S.S., upon request.
References
Ahmed H, Destgeer G, Park J, Afzal M, Sung HJ (2018) Sheathless focusing and separation of microparticles using tilted-angle traveling surface acoustic waves. Anal Chem 90(14):8546–8552. https://doi.org/10.1021/acs.analchem.8b01593
Ang B, Sookram A, Devendran C, He V, Tuck K, Cadarso V, Neild A (2023) Glass-embedded PDMS microfluidic device for enhanced concentration of nanoparticles using an ultrasonic nanosieve. Lab Chip 23:525–533. https://doi.org/10.1039/d2lc00802e
Baasch T, Pavlic A, Dual J (2019) Acoustic radiation force acting on a heavy particle in a standing wave can be dominated by the acoustic microstreaming. Phys Rev E 100(6–1):061102. https://doi.org/10.1103/PhysRevE.100.061102
Bach JS, Bruus H (2018) Theory of pressure acoustics with viscous boundary layers and streaming in curved elastic cavities. J Acoust Soc Am 144(2):766. https://doi.org/10.1121/1.5049579
Barnkob R, Nama N, Ren L, Huang TJ, Costanzo F, Kähler CJ (2018) Acoustically driven fluid and particle motion in confined and leaky systems. Phys Rev Appl 9(1):014027. https://doi.org/10.1103/PhysRevApplied.9.014027
Behdani B, Monjezi S, Carey MJ, Weldon CG, Zhang J, Wang C, Park J (2018) Shape-based separation of micro-/nanoparticles in liquid phases. Biomicrofluidics 12(5):051503. https://doi.org/10.1063/1.5052171
Bruus H (2012) Acoustofluidics 2: perturbation theory and ultrasound resonance modes. Lab Chip 12(1):20–28. https://doi.org/10.1039/c1lc20770a
Cheeke JDN (2002) Fundamentals and applications of ultrasonic waves. CRC series in pure and applied physics. CRC Press, Boca Raton
Cierpka C, Lütke B, Kähler CJ (2013) Higher order multi-frame particle tracking velocimetry. Exp Fluids 54(5):1533. https://doi.org/10.1007/s00348-013-1533-3
Collins DJ, Neild A, Ai Y (2016) Highly focused high-frequency travelling surface acoustic waves (SAW) for rapid single-particle sorting. Lab Chip 16(3):471–479. https://doi.org/10.1039/c5lc01335f
de Timary G, Rousseau CJ, van Melderen L, Scheid B (2022) Shear-enhanced sorting of ovoid and filamentous bacterial cells using pinch flow fractionation. Lab Chip 23(4):659–670. https://doi.org/10.1039/d2lc00969b
Destgeer G, Ha BH, Jung JH, Sung HJ (2014) Submicron separation of microspheres via travelling surface acoustic waves. Lab Chip 14(24):4665–4672. https://doi.org/10.1039/c4lc00868e
Destgeer G, Ha BH, Park J, Jung JH, Alazzam A, Sung HJ (2015) Microchannel anechoic corner for size-selective separation and medium exchange via traveling surface acoustic waves. Anal Chem 87(9):4627–4632. https://doi.org/10.1021/acs.analchem.5b00525
Devendran C, Albrecht T, Brenker J, Alan T, Neild A (2016) The importance of travelling wave components in standing surface acoustic wave (SSAW) systems. Lab Chip 16(19):3756–3766. https://doi.org/10.1039/c6lc00798h
Ding X, Li P, Lin SCS, Stratton ZS, Nama N, Guo F, Slotcavage D, Mao X, Shi J, Costanzo F, Huang TJ (2013) Surface acoustic wave microfluidics. Lab Chip 13(18):3626–3649. https://doi.org/10.1039/c3lc50361e
Ding X, Peng Z, Lin SCS, Geri M, Li S, Li P, Chen Y, Dao M, Suresh S, Huang TJ (2014) Cell separation using tilted-angle standing surface acoustic waves. Proc Natl Acad Sci USA 111(36):12992–12997. https://doi.org/10.1073/pnas.1413325111
Ding L, Yang X, Gao Z, Effah CY, Zhang X, Wu Y, Qu L (2021) A holistic review of the state-of-the-art microfluidics for exosome separation: an overview of the current status, existing obstacles, and future outlook. Small 17(29):2007174. https://doi.org/10.1002/smll.202007174
Doinikov AA (1994) Acoustic radiation pressure on a rigid sphere in a viscous fluid. Proc R Soc Lond Ser A Math Phys Sci 447:447–466
Doinikov AA (1997) Acoustic radiation force on a spherical particle in a viscous heat-conducting fluid. I. General formula. J Acoust Soc Am 101(2):713–721. https://doi.org/10.1121/1.418035
Doinikov AA (2001) Acoustic radiation interparticle forces in a compressible fluid. J Fluid Mech 444:1–21. https://doi.org/10.1017/S0022112001005055
Dow P, Kotz K, Gruszka S, Holder J, Fiering J (2018) Acoustic separation in plastic microfluidics for rapid detection of bacteria in blood using engineered bacteriophage. Lab Chip 18(6):923–932. https://doi.org/10.1039/c7lc01180f
Dual J, Hahn P, Leibacher I, Möller D, Schwarz T, Wang J (2012) Acoustofluidics 19: ultrasonic microrobotics in cavities: devices and numerical simulation. Lab Chip 12(20):4010–4021. https://doi.org/10.1039/c2lc40733g
Fakhfouri A, Devendran C, Albrecht T, Collins DJ, Winkler A, Schmidt H, Neild A (2018) Surface acoustic wave diffraction driven mechanisms in microfluidic systems. Lab Chip 18(15):2214–2224. https://doi.org/10.1039/c8lc00243f
Fan Z, Mei D, Yang K, Chen Z (2008) Acoustic radiation torque on an irregularly shaped scatterer in an arbitrary sound field. J Acoust Soc Am 124(5):2727–2732. https://doi.org/10.1121/1.2977733
Fan Y, Wang X, Ren J, Lin F, Wu J (2022) Recent advances in acoustofluidic separation technology in biology. Microsyst Nanoeng 8:94. https://doi.org/10.1038/s41378-022-00435-6
Ganesh M, Hawkins SC (2008) A far-field based T-matrix method for three dimensional acoustic scattering. ANZIAM J 50:121–136. https://doi.org/10.21914/anziamj.v50i0.1441
Ganesh M, Hawkins SC (2022) A numerically stable T-matrix method for acoustic scattering by nonspherical particles with large aspect ratios and size parameters. J Acoust Soc Am 151(3):1978. https://doi.org/10.1121/10.0009679
Gao Y, Wu M, Lin Y, Xu J (2020) Acoustic microfluidic separation techniques and bioapplications: a review. Micromachines 11(10):921. https://doi.org/10.3390/mi11100921
Garbin A, Leibacher I, Hahn P, Le Ferrand H, Studart A, Dual J (2015) Acoustophoresis of disk-shaped microparticles: a numerical and experimental study of acoustic radiation forces and torques. J Acoust Soc Am 138(5):2759–2769. https://doi.org/10.1121/1.4932589
Gong Z, Marston PL, Li W (2019) T-matrix evaluation of three-dimensional acoustic radiation forces on nonspherical objects in Bessel beams with arbitrary order and location. Phys Rev E 99:063004. https://doi.org/10.1103/PhysRevE.99.063004
Gupta S, Feke Donald L, Manas-Zloczower I (1995) Fractionation of mixed particulate solids according to compressibility using ultrasonic standing wave fields. Chem Eng Sci 50:3275–3284
Hahn P (2015) Numerical simulation tools for the design and the analysis of acoustofluidic devices. Ph.D. thesis, ETH Zürich
Hahn P, Leibacher I, Baasch T, Dual J (2015) Numerical simulation of acoustofluidic manipulation by radiation forces and acoustic streaming for complex particles. Lab Chip 15(22):4302–4313. https://doi.org/10.1039/c5lc00866b
Hahn P, Lamprecht A, Dual J (2016) Numerical simulation of micro-particle rotation by the acoustic viscous torque. Lab Chip 16(23):4581–4594. https://doi.org/10.1039/c6lc00865h
Hoque SZ, Bhattacharyya K, Sen AK (2022) Dynamical motion of an oblate shaped particle exposed to an acoustic standing wave in a microchannel. Phys Rev Fluids 7(11):114204. https://doi.org/10.1103/PhysRevFluids.7.114204
Jakobsson O, Antfolk M, Laurell T (2014) Continuous flow two-dimensional acoustic orientation of nonspherical cells. Anal Chem 86(12):6111–6114. https://doi.org/10.1021/ac5012602
Jerome TS, Ilinskii YA, Zabolotskaya EA, Hamilton MF (2021) Acoustic radiation torque on a compressible spheroid. J Acoust Soc Am 149(3):2081. https://doi.org/10.1121/10.0003813
Jiang D, Liu S, Tang W (2022) Fabrication and manipulation of non-spherical particles in microfluidic channels: a review. Micromachines 13(10):1659. https://doi.org/10.3390/mi13101659
Jo MC, Guldiken R (2012) Active density-based separation using standing surface acoustic waves. Sens Actuators A: Phys 187:22–28. https://doi.org/10.1016/j.sna.2012.08.020
Joergensen JH (2022) Theory and modeling of thermoviscous acoustofluidics. Ph.D. thesis, Technical University of Denmark
Joergensen JH, Bruus H (2021) Theory of pressure acoustics with thermoviscous boundary layers and streaming in elastic cavities. J Acoust Soc Am 149(5):3599. https://doi.org/10.1121/10.0005005
Karlsen JT (2018) Theory of nonlinear acoustic forces acting on fluid and particles in microsystems. Ph.D. thesis, Technical University of Denmark
Kiebert F, Wege S, Massing J, König J, Cierpka C, Weser R, Schmidt H (2017) 3D measurement and simulation of surface acoustic wave driven fluid motion: a comparison. Lab Chip 17(12):2104–2114. https://doi.org/10.1039/c7lc00184c
King LV (1934) On the acoustic radiation pressure on spheres. Proc R Soc Lond Ser A Math Phys Sci 147(861):212–240. https://doi.org/10.1098/rspa.1934.0215
Laurell T, Petersson F, Nilsson A (2007) Chip integrated strategies for acoustic separation and manipulation of cells and particles. Chem Soc Rev 36(3):492–506. https://doi.org/10.1039/b601326k
Lauricella G, Zhou J, Luan Q, Papautsky I, Peng Z (2022) Computational study of inertial migration of prolate particles in a straight rectangular channel. Phys Fluids 34(8):082021. https://doi.org/10.1063/5.0100963
Leão-Neto JP, Lopes JH, Silva GT (2020) Acoustic radiation torque exerted on a subwavelength spheroidal particle by a traveling and standing plane wave. J Acoust Soc Am 147(4):2177. https://doi.org/10.1121/10.0001016
Leão-Neto JP, Hoyos M, Aider JL, Silva GT (2021) Acoustic radiation force and torque on spheroidal particles in an ideal cylindrical chamber. J Acoust Soc Am 149(1):285. https://doi.org/10.1121/10.0003046
Lei J, Hill M, Glynne-Jones P (2014) Numerical simulation of 3D boundary-driven acoustic streaming in microfluidic devices. Lab Chip 14(3):532–541. https://doi.org/10.1039/c3lc50985k
Leibacher I, Reichert P, Dual J (2015) Microfluidic droplet handling by bulk acoustic wave (BAW) acoustophoresis. Lab Chip 15(13):2896–2905. https://doi.org/10.1039/c5lc00083a
Ley MWH (2017) Effective modelling of acoustofluidic devices. Ph.D. thesis, Technical University of Denmark
Li P, Mao Z, Peng Z, Zhou L, Chen Y, Huang PH, Truica CI, Drabick JJ, El-Deiry WS, Dao M, Suresh S, Huang TJ (2015) Acoustic separation of circulating tumor cells. Proc Natl Acad Sci USA 112(16):4970–4975. https://doi.org/10.1073/pnas.1504484112
Li P, Zhong J, Liu N, Lu X, Liang M, Ai Y (2021) Physical properties-based microparticle sorting at submicron resolution using a tunable acoustofluidic device. Sens Actuators B: Chem 344:130203. https://doi.org/10.1016/j.snb.2021.130203
Li Y, Cai S, Shen H, Chen Y, Ge Z, Yang W (2022) Recent advances in acoustic microfluidics and its exemplary applications. Biomicrofluidics 16(3):031502. https://doi.org/10.1063/5.0089051
Lima EB, Silva GT (2021) Mean acoustic fields exerted on a subwavelength axisymmetric particle. J Acoust Soc Am 150(1):376. https://doi.org/10.1121/10.0005625
Lima EB, Leão-Neto JP, Marques AS, Silva GC, Lopes JH, Silva GT (2020) Nonlinear interaction of acoustic waves with a spheroidal particle: radiation force and torque effects. Phys Rev Appl 13(6):064048. https://doi.org/10.1103/PhysRevApplied.13.064048
Lin S, Yu Z, Di Chen, Wang Z, Miao J, Li Q, Zhang D, Song J, Cui D (2020) Progress in microfluidics-based exosome separation and detection technologies for diagnostic applications. Small 16(9):1903916. https://doi.org/10.1002/smll.201903916
Liu G, He F, Li X, Zhao H, Zhang Y, Li Z, Yang Z (2019) Multi-level separation of particles using acoustic radiation force and hydraulic force in a microfluidic chip. Microfluid Nanofluid 23:23. https://doi.org/10.1007/s10404-019-2189-y
Nam J, Lee Y, Shin S (2011a) Size-dependent microparticles separation through standing surface acoustic waves. Microfluid Nanofluid 11:317–326. https://doi.org/10.1007/s10404-011-0798-1
Nam J, Lim H, Kim D, Shin S (2011b) Separation of platelets from whole blood using standing surface acoustic waves in a microchannel. Lab Chip 11(19):3361–3364. https://doi.org/10.1039/c1lc20346k
Nasiri R, Shamloo A, Ahadian S, Amirifar L, Akbari J, Goudie MJ, Lee K, Ashammakhi N, Dokmeci MR, Di Carlo D, Khademhosseini A (2020) Microfluidic-based approaches in targeted cell/particle separation based on physical properties: fundamentals and applications. Small 16(29):2000171. https://doi.org/10.1002/smll.202000171
Nyborg WL (1953) Acoustic streaming due to attenuated plane waves. J Acoust Soc Am 25(1):68–75. https://doi.org/10.1121/1.1907010
Pavlic A, Nagpure P, Ermanni L, Dual J (2022) Influence of particle shape and material on the acoustic radiation force and microstreaming in a standing wave. Phys Rev E 106:015105. https://doi.org/10.1103/PhysRevE.106.015105
Ren L, Yang S, Zhang P, Qu Z, Mao Z, Huang PH, Chen Y, Wu M, Wang L, Li P, Huang TJ (2018) Standing surface acoustic wave (SSAW)-based fluorescence-activated cell sorter. Small 14:1801996. https://doi.org/10.1002/smll.201801996
Riaud A, Baudoin M, Bou Matar O, Thomas JL, Brunet P (2017) On the influence of viscosity and caustics on acoustic streaming in sessile droplets: an experimental and a numerical study with a cost-effective method. J Fluid Mech 821:384–420. https://doi.org/10.1017/jfm.2017.178
Richard C, Fakhfouri A, Colditz M, Striggow F, Kronstein-Wiedemann R, Tonn T, Medina-Sánchez M, Schmidt OG, Gemming T, Winkler A (2019) Blood platelet enrichment in mass-producible surface acoustic wave (SAW) driven microfluidic chips. Lab Chip 19(24):4043–4051. https://doi.org/10.1039/c9lc00804g
Rossi M (2020) Synthetic image generator for defocusing and astigmatic PIV/PTV. Meas Sci Technol 31(1):017003. https://doi.org/10.1088/1361-6501/ab42bb
Sachs S, Baloochi M, Cierpka C, König J (2022a) On the acoustically induced fluid flow in particle separation systems employing standing surface acoustic waves—part I. Lab Chip 22:2011–2027. https://doi.org/10.1039/d1lc01113h
Sachs S, Cierpka C, König J (2022b) On the acoustically induced fluid flow in particle separation systems employing standing surface acoustic waves—part II. Lab Chip 22:2028–2040. https://doi.org/10.1039/d2lc00106c
Sachs S, Ratz M, Mäder P, König J, Cierpka C (2023) Particle detection and size recognition based on defocused particle images: a comparison of a deterministic algorithm and a deep neural network. Exp Fluids. https://doi.org/10.1007/s00348-023-03574-2
Schwarz T, Petit-Pierre G, Dual J (2013) Rotation of non-spherical micro-particles by amplitude modulation of superimposed orthogonal ultrasonic modes. J Acoust Soc Am 133(3):1260–1268. https://doi.org/10.1121/1.4776209
Schwarz T, Hahn P, Petit-Pierre G, Dual J (2015) Rotation of fibers and other non-spherical particles by the acoustic radiation torque. Microfluid Nanofluid 18:65–79. https://doi.org/10.1007/s10404-014-1408-9
Sepehrirahnama S, Lim KM, Chau FS (2015) Numerical study of interparticle radiation force acting on rigid spheres in a standing wave. J Acoust Soc Am 137(5):2614–2622. https://doi.org/10.1121/1.4916968
Sepehrirahnama S, Oberst S, Chiang YK, Powell D (2021) Acoustic radiation force and radiation torque beyond particles: effects of nonspherical shape and Willis coupling. Phys Rev E 104:065003. https://doi.org/10.1103/PhysRevE.104.065003
Settnes M, Bruus H (2012) Forces acting on a small particle in an acoustical field in a viscous fluid. Phys Rev E 85:016327. https://doi.org/10.1103/PhysRevE.85.016327
Shi J, Huang H, Stratton Z, Huang Y, Huang TJ (2009) Continuous particle separation in a microfluidic channel via standing surface acoustic waves (SSAW). Lab Chip 9(23):3354–3359. https://doi.org/10.1039/b915113c
Silva GT (2014) Acoustic radiation force and torque on an absorbing compressible particle in an inviscid fluid. J Acoust Soc Am 136(5):2405–2413. https://doi.org/10.1121/1.4895691
Silva GT, Drinkwater BW (2018) Acoustic radiation force exerted on a small spheroidal rigid particle by a beam of arbitrary wavefront: examples of traveling and standing plane waves. J Acoust Soc Am 144(5):EL453. https://doi.org/10.1121/1.5080529
Silva GT, Lobo TP, Mitri FG (2012) Radiation torque produced by an arbitrary acoustic wave. EPL 97(5):54003. https://doi.org/10.1209/0295-5075/97/54003
Tai CW, Narsimhan V (2022) Experimental and theoretical studies of cross-stream migration of non-spherical particles in a quadratic flow of a viscoelastic fluid. Soft Matter 18(24):4613–4624. https://doi.org/10.1039/d2sm00011c
Tai CW, Wang S, Narsimhan V (2020a) Cross-stream migration of nonspherical particles in second-order fluid flows: effect of flow profiles. AIChE J 66(12):e17076. https://doi.org/10.1002/aic.17076
Tai CW, Wang S, Narsimhan V (2020b) Cross-stream migration of non-spherical particles in a second-order fluid—theories of particle dynamics in arbitrary quadratic flows. J Fluid Mech 895:A6. https://doi.org/10.1017/jfm.2020.300
Wang J, Dual J (2011) Theoretical and numerical calculations for the time-averaged acoustic force and torque acting on a rigid cylinder of arbitrary size in a low viscosity fluid. J Acoust Soc Am 129(6):3490–3501. https://doi.org/10.1121/1.3589247
Wang J, Dual J (2012) Theoretical and numerical calculation of the acoustic radiation force acting on a circular rigid cylinder near a flat wall in a standing wave excitation in an ideal fluid. Ultrasonics 52(2):325–332. https://doi.org/10.1016/j.ultras.2011.09.002
Weirauch L, Giesler J, Baune M, Pesch GR, Thöming J (2022) Shape-selective remobilization of microparticles in a mesh-based DEP filter at high throughput. Sep Purif Technol 300:121792. https://doi.org/10.1016/j.seppur.2022.121792
Weser R, Winkler A, Weihnacht M, Menzel S, Schmidt H (2020) The complexity of surface acoustic wave fields used for microfluidic applications. Ultrasonics 106:106160. https://doi.org/10.1016/j.ultras.2020.106160
Weser R, Deng Z, Kondalkar VV, Darinskii AN, Cierpka C, Schmidt H, König J (2022) Three-dimensional heating and patterning dynamics of particles in microscale acoustic tweezers. Lab Chip 22(15):2886–2901. https://doi.org/10.1039/d2lc00200k
Wijaya FB, Lim KM (2015) Numerical calculation of acoustic radiation force and torque acting on rigid non-spherical particles. Acta Acust United Acust 101(3):531–542. https://doi.org/10.3813/AAA.918850
Wu M, Mao Z, Chen K, Bachman H, Chen Y, Rufo J, Ren L, Li P, Wang L, Huang TJ (2017a) Acoustic separation of nanoparticles in continuous flow. Adv Funct Mater 27(14):1606039. https://doi.org/10.1002/adfm.201606039
Wu M, Ouyang Y, Wang Z, Zhang R, Huang PH, Chen C, Li H, Li P, Quinn D, Dao M, Suresh S, Sadovsky Y, Huang TJ (2017b) Isolation of exosomes from whole blood by integrating acoustics and microfluidics. Proc Natl Acad Sci USA 114(40):10584–10589. https://doi.org/10.1073/pnas.1709210114
Wu M, Huang PH, Zhang R, Mao Z, Chen C, Kemeny G, Li P, Lee AV, Gyanchandani R, Armstrong AJ, Dao M, Suresh S, Huang TJ (2018) Circulating tumor cell phenotyping via high-throughput acoustic separation. Small 14(32):1801131. https://doi.org/10.1002/smll.201801131
Yamahira S, Si Hatanaka, Kuwabara M, Asai S (2000) Orientation of fibers in liquid by ultrasonic standing waves. Jpn J Appl Phys 39:3683. https://doi.org/10.1143/JJAP.39.3683
Yang T, Vitali V, Minzioni P (2018) Acoustofluidic separation: impact of microfluidic system design and of sample properties. Microfluid Nanofluid 22:44. https://doi.org/10.1007/s10404-018-2063-3
Zareei SM, Sepehrirahnama S, Jamshidian M, Ziaei-Rad S (2022) Three-dimensional numerical simulation of particle acoustophoresis: COMSOL implementation and case studies. Eng Comput 39:735–750. https://doi.org/10.1007/s00366-022-01663-0
Zhao S, Wu M, Yang S, Wu Y, Gu Y, Chen C, Ye J, Xie Z, Tian Z, Bachman H, Huang PH, Xia J, Zhang P, Zhang H, Huang TJ (2020) A disposable acoustofluidic chip for nano/microparticle separation using unidirectional acoustic transducers. Lab Chip 20(7):1298–1308. https://doi.org/10.1039/d0lc00106f
Acknowledgements
The authors thank the German Research Foundation (DFG) for financial support within the priority program PP2045 “MehrDimPart” (CI 185/8-1) and under grant number SCHM 2365/17-1, CI 185/14-1. Support by the Center of Micro- and Nanotechnologies (ZMN) (DFG RIsources reference: RI_00009), a DFG-founded core facility (Grant no. MU 3171/6-1, SCHA 632/27-1, HO 2284/12-1) of TU Ilmenau is gratefully acknowledged. Furthermore, we thank David Schreier (TU Ilmenau) and Laura Weirauch (University of Bremen), who helped in the preparation of the samples and supported non-spherical particles, respectively, as well as Zhichao Deng and Thomas Boeck for fruitful scientific discussion. Technical support by Henning Schwanbeck using the high-performance computing cluster at the Universitätsrechenzentrum of TU Ilmenau is gratefully acknowledged.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Contributions
SS contributed to conceptualization, data curation, formal analysis, investigation, methodology, software, validation, visualization, writing—original draft, and writing—review and editing. HS contributed to data curation, formal analysis, investigation, resources, and writing—review and editing. C.C. contributed to conceptualization, methodology, funding acquisition, project administration, resources, supervision, and writing—review and editing. J.K. contributed to conceptualization, methodology, funding acquisition, project administration, resources, supervision, and writing—review and editing.
Corresponding author
Ethics declarations
Conflict of interest
There are no conflicts of interest to declare.
Ethical approval
Not applicable.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Sachs, S., Schmidt, H., Cierpka, C. et al. On the behavior of prolate spheroids in a standing surface acoustic wave field. Microfluid Nanofluid 27, 81 (2023). https://doi.org/10.1007/s10404-023-02690-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10404-023-02690-z