
Abstract
Inspired by the shape of some plant leaves, we find that the thin-walled U-shaped strips exhibit different compliances under bending with opposite orientations. The asymmetric bending compliance is attributed to the buckling of sidewalls of strips caused by the bending-induced compression. Integrating the Euler–Bernoulli beam theory with the Kirchhoff–Love thin plate theory, a theoretical model is derived for the in-depth understanding of the sidewall buckling. For pure bending, the critical moment applied to the strip for the sidewall buckling is found to be insensitive to the height, width and length of strip, which is the result of the compromise between the opposite geometric effects on the buckling behavior of sidewalls and the characteristics of cross sections. Then the critical moment can be approximated as a linear function of flexural rigidity \(D = Et^{3} /12\left( {1 - {\nu}^{2} } \right)\), where t is the wall thickness of strip, E is Young’s modulus, and v is Poisson’s ratio. These predictions by our model agree well with the results obtained by finite element analysis. We also investigate the buckling behavior of sidewalls for bending under transverse loads, considering the loading conditions of concentrated force and distributed force. Our study unveils the mechanism behind the asymmetric bending compliance of thin-walled U-shaped strips. These results would offer convenient guidance for the promising engineering applications related to this structure, such as the design of soft robots with enhanced locomotion performance.








Similar content being viewed by others

Availability of Data and Materials
The data that support the findings of this study are available from the corresponding author upon reasonable request.
References
Stowers AK, Lentink D. Folding in and out: Passive morphing in flapping wings. Bioinspir Biomim. 2015;10(2):025001.
Lentink D, Müller UK, Stamhuis EJ, de Kat R, van Gestel W, Veldhuis LLM, Henningsson P, Hedenström A, Videler JJ, van Leeuwen JL. How swifts control their glide performance with morphing wings. Nature. 2007;446(7139):1082–5.
Tobalske BW. Biomechanics of bird flight. J Exp Biol. 2007;210(18):3135–46.
Gal JM, Blake RW. Biomechanics of frog swimming: I. Estimation of the propulsive force generated by hymenochirus boettgeri. J Exp Biol. 1988;138(1):399–411.
Gal JM, Blake RW. Biomechanics of frog swimming: Ii. Mechanics of the limb-beat cycle in hymenochirus boettgeri. J Exp Biol. 1988;138(1):413–29.
Stamhuis EJ, Nauwelaerts S. Propulsive force calculations in swimming frogs II. Application of a vortex ring model to dpiv data. J Exp Biol. 2005;208(8):1445–51.
Kuang Y, Chen C, Cheng J, Pastel G, Li T, Song J, Jiang F, Li Y, Zhang Y, Jang S-H, Chen G, Li T, Hu L. Selectively aligned cellulose nanofibers towards high-performance soft actuators. Extreme Mech Lett. 2019;29:100463.
Wang E, Desai MS, Lee S-W. Light-controlled graphene-elastin composite hydrogel actuators. Nano Lett. 2013;13(6):2826–30.
Arazoe H, Miyajima D, Akaike K, Araoka F, Sato E, Hikima T, Kawamoto M, Aida T. An autonomous actuator driven by fluctuations in ambient humidity. Nat Mater. 2016;15(10):1084–9.
Yang Y, Terentjev EM, Wei Y, Ji Y. Solvent-assisted programming of flat polymer sheets into reconfigurable and self-healing 3d structures. Nat Commun. 2018;9(1):1906.
Luo R, Wu J, Dinh N-D, Chen C-H. Gradient porous elastic hydrogels with shape-memory property and anisotropic responses for programmable locomotion. Adv Funct Mater. 2015;25(47):7272–9.
Cao X, Zhang M, Zhang Z, Xu Y, Xiao Y, Li T. Review of soft linear actuator and the design of a dielectric elastomer linear actuator. Acta Mech Solida Sin. 2019;32(5):566–79.
Kwan KW, Li SJ, Hau NY, Li W-D, Feng SP, Ngan AHW. Light-stimulated actuators based on nickel hydroxide-oxyhydroxide. Sci Robot. 2018;3(18):eaat4051.
Ze Q, Kuang X, Wu S, Wong J, Montgomery SM, Zhang R, Kovitz JM, Yang F, Qi HJ, Zhao R. Magnetic shape memory polymers with integrated multifunctional shape manipulation. Adv Mater. 2020;32(4):1906657.
Kotikian A, McMahan C, Davidson EC, Muhammad JM, Weeks RD, Daraio C, Lewis JA. Untethered soft robotic matter with passive control of shape morphing and propulsion. Sci Robot. 2019;4(33):eaax7044.
Wang S, Gao Y, Wei A, Xiao P, Liang Y, Lu W, Chen C, Zhang C, Yang G, Yao H, Chen T. Asymmetric elastoplasticity of stacked graphene assembly actualizes programmable untethered soft robotics. Nat Commun. 2020;11(1):4359.
Pilz-da-Cunha M, Ambergen S, Debije MG, Homburg EFGA, den Toonder JMJ, Schenning APHJ. A soft transporter robot fueled by light. Adv Sci. 2020;7(5):1902842.
He Q, Wang Z, Wang Y, Minori A, Tolley MT, Cai S. Electrically controlled liquid crystal elastomer-based soft tubular actuator with multimodal actuation. Sci Adv. 2019;5(10):eaax5746.
Wu S, Ze Q, Zhang R, Hu N, Cheng Y, Yang F, Zhao R. Symmetry-breaking actuation mechanism for soft robotics and active metamaterials. ACS Appl Mater Inter. 2019;11(44):41649–58.
Pishvar M, Harne RL. Foundations for soft, smart matter by active mechanical metamaterials. Adv Sci. 2020;7(18):2001384.
Seffen KA, Pellegrino S. Deployment dynamics of tape springs. Proc R Soc London, Ser A. 1983;1999(455):1003–48.
Chen Z, Guo Q, Majidi C, Chen W, Srolovitz DJ, Haataja MP. Nonlinear geometric effects in mechanical bistable morphing structures. Phys Rev Lett. 2012;109(11):114302.
Kebadze E, Guest SD, Pellegrino S. Bistable prestressed shell structures. Int J Solids Struct. 2004;41(11):2801–20.
Giomi L, Mahadevan L. Multi-stability of free spontaneously curved anisotropic strips. Proc R Soc A. 2012;468(2138):511–30.
Seffen KA. Folding a ridge-spring. J Mech Phys Solids. 2020;137: 103820.
Wang L, Zhong Z. Dynamics of the dragonfly wings raised by blood circulation. Acta Mech. 2014;225(4):1471–85.
Wang L, Ye W, Zhou Y. Impact dynamics of a dragonfly wing. CMES-Comp Model Eng. 2020;122(3):889–906.
Zhao Z-L, Zhou S, Feng X-Q, Xie YM. Static and dynamic properties of pre-twisted leaves and stalks with varying chiral morphologies. Extreme Mech Lett. 2020;34:100612.
Zhao Z, Huang W, Li B, Chen K, Chen K, Zhao H, Feng X. Synergistic effects of chiral morphology and reconfiguration in cattail leaves. J Bionic Eng. 2015;12(4):634–42.
Peres N, Gonçalves R, Camotim D. A geometrically exact beam finite element for curved thin-walled bars with deformable cross-section. Comput Method Appl M. 2021;381:113804.
Siéfert E, Cattaud N, Reyssat E, Roman B, Bico J. Stretch-induced bending of soft ribbed strips. Phys Rev Lett. 2021;127(16): 168002.
Liu Q, Qiao P, Guo X. Buckling analysis of restrained orthotropic plates under combined in-plane shear and axial loads and its application to web local buckling. Compos Struct. 2014;111:540–52.
Shufrin I, Rabinovitch O, Eisenberger M. Buckling of laminated plates with general boundary conditions under combined compression, tension, and shear—a semi-analytical solution. Thin Wall Struct. 2008;46(7):925–38.
Iguchi S. Die knickung der rechteckigen platte durch schubkräfte. Ing Arch. 1938;9(1):1–12.
Acknowledgements
We thank Andre Eccel Vellwock and Chengyu Wu for helpful discussions.
Funding
This work was supported by the National Natural Science Foundation of China (Grant No. 11972226).
Author information
Authors and Affiliations
Contributions
AW contributed to methodology, software, validation, and writing—original draft. ZG contributed to validation. FG contributed to conceptualization, writing—review and editing, and supervision.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
Consent for Publication
Not applicable.
Ethics Approval and Consent to Participate
Not applicable.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Appendix: Theoretical derivations of effective elastic coefficients \({\varvec{k}}_{1}\) and \({\varvec{k}}_{2}\)
Appendix: Theoretical derivations of effective elastic coefficients \({\varvec{k}}_{1}\) and \({\varvec{k}}_{2}\)
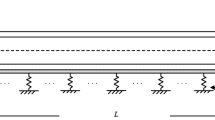
A thin-walled U-shaped strip under positive bending can be divided into two parts by the neutral surface. The upper part is regarded as thin plates under compression with lower sides connected to the remaining bottom part. The bottom part is also a U-shaped strip with a cross-section in the size of \(h_{2} \times b\), as depicted in Fig.

Schematics of the derivations of elastic coefficients \({k}_{1}\) and \({k}_{2}\). For a U-shaped strip, the part below the neutral surface shown in a is modeled as a frame system \(\overline{ABC}\) shown in b
9a. Take the unit length for analysis. Since the wall thickness t is much smaller than b and \(h_{2}\), the bottom part can be approximated as a two-dimensional frame system \(\overline{ABC}\), which is illustrated in Fig. 9b. The bars \(\overline{AB}\) and \(\overline{BC}\) are firmly jointed at point B. At point A, the displacement along the z-direction and the rotation are prohibited to represent the symmetry of the bottom structure. At point C, the displacement along the y-direction is fixed to hold the static determinacy of the frame system, while no constraints are applied to the movement along the z-direction or the rotation, allowing the deformation of the sidewalls in the upper part.
Then \(k_{1}\) can be obtained from the relationship between the applied force F and the resulting displacement \(\delta\) at point C along the z-direction, which is written as \(k_{1} = F/\delta\). Many methods can be found in the textbooks of structural mechanics for the solution of \(k_{1}\). Using the unit load method based on the principle of virtual work, we have
Substituting \(I^{\prime } = t^{3} /12\), \(k_{1}\) is calculated as
Similarly, \(k_{2}\) can be obtained as \(k_{2} = M/\theta\), where M is the applied moment and \(\theta\) is the resulting rotation angle at point C. Using the same method, we have
Then \(k_{2}\) is given by
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Wei, A., Guo, Z. & Guo, F. Unveiling the Mechanism Behind the Asymmetric Bending Compliance of Thin-Walled U-Shaped Strips: A Study Inspired by Plant Leaves. Acta Mech. Solida Sin. 36, 156–165 (2023). https://doi.org/10.1007/s10338-022-00361-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10338-022-00361-0