
Abstract
Dielectric elastomers have found interesting applications in soft loudspeakers, where vibrations subject to alternating electrical excitations are the key features. Although there are many theoretical studies on the nonlinear vibrations of dielectric elastomers subject to electromechanical coupling loads, the systematic experimental research is rare. In this work, we design a simple experimental setup to observe the out-of-plane vibrations of a circular dielectric elastomer actuator. We find that the dielectric elastomer has different response modes including the harmonic, super-harmonic and sub-harmonic responses at different excitation frequencies. We analyze the responses by using the short-time Fourier transformation. We find that the equivalent voltage and the AC/DC ratio are the main parameters affecting the occurrence of sub-harmonic responses. The phenomenon of mode shift is also observed in our experiments. These experimental observations provide a deeper understanding of the dynamic responses of dielectric elastomer subject to electromechanical loads.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Dielectric elastomers, as an ideal candidate for artificial muscles, have attracted great interest in the field of soft robotics [1,2,3,4,5,6]. Attributes of the dielectric elastomer include large deformation, fast response, low cost and high energy density [7,8,9,10,11]. There have been intensive studies on actuator applications based on dielectric elastomers such as cardiac membrane pump [12], artificial bicep for orthotic and prosthetic technology [13], active noise control [14], frequency tuning [15] and flexible loudspeaker [16, 17]. In 2013, a novel design of a transparent, stretchable loudspeaker combining dielectric elastomers as the actuator and hydrogels as the electrode was reported [17]. The loudspeaker transmits signals from a computer and plays music nicely in a wide audio range. The use of dielectric elastomers in these audio applications requires a deeper understanding of the complex vibration behaviors.
Many theoretical investigations on the nonlinear vibration of dielectric elastomers can be found in the literature. For example, Mockensturm and Goulbourne studied the time response of spherical films under a specific applied voltage [18]. Dubois et al. [15] and Jia et al. [19] demonstrated that the frequency of flat film can be adjusted by voltage to design functional devices. Zhu et al. [20] studied the nonlinear vibration of spherical membrane and showed that the membrane has sub-harmonic, harmonic and super-harmonic resonances. Wang et al. [21], Zhu et al. [22], and Lv et al. [23] predicted the chaotic phenomena of nonlinear vibrations of dielectric elastomer films under certain boundary conditions. However, there has been very limited systematic experimental work focusing on the basic characteristics of nonlinear vibrations of dielectric elastomers. Fox et al. [24] studied an inflated balloon subject to an alternating electric actuation. They found that the overall response of the membrane is quite different from that of the traditional continuous membrane structure. They also found the phenomena of super-harmonic responses in their experiments but did not report any sub-harmonic responses. In the configuration of the transparent loudspeaker, all the sub-harmonic, harmonic and super-harmonic responses were observed, but no other details were presented [17].
Super-harmonic and sub-harmonic responses are common features of nonlinear dynamic systems. The dielectric elastomer subject to electromechanical coupling loads serves as a good example for probing this topic. This paper presents a systematic experimental study and a detailed analysis on the nonlinear dynamic responses of dielectric elastomers. We design an experimental setup to observe the vibration modes of a dielectric elastomer membrane subject to alternating excitation and measure the resonance frequency. We focus on the phenomenon of sub-harmonic responses.
2 Modes of Vibration
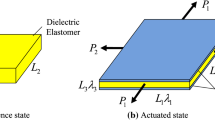
Figure 1a shows the schematic of the experimental setup. A circular, transparent membrane of a dielectric elastomer (VHB 4905 3M) was pre-stretched equal-biaxially by 2 times of the initial length and then mounted on a rigid disk as the reference state. The initial thickness was 0.5 mm, and the initial radius was 40 mm. In the reference state, the pre-stretched radius became 80 mm and the thickness was calculated to be 0.125 mm, assuming that the volume does not change. The pre-stretch can effectively suppress the electromechanical instability [25,26,27,28,29]. Throughout the experiments, the pre-stretch was fixed to be 2. The central part of the membrane with a diameter of 20 mm was coated with carbon black electrodes on both sides. When a voltage is applied at the central part, the membrane squeezes in thickness and expands in area. The remaining part of the membrane, that is, the passive part, also deforms along with the active area. When an alternating voltage is applied, the membrane vibrates out of the plane.

a Schematics of a pre-stretched membrane of a dielectric elastomer subject to an alternating excitation. The active part (black) is coated with carbon black electrodes. The passive part is transparent. b The observed deformation under different excitation frequencies

a The displacement response of membrane center measured by a laser vibrometer. b The response frequency as a function of sweep time through a short-time Fourier transformation

a The displacement response as a function of sweep time, with two clear peaks found at 77.5 Hz and 155 Hz, respectively. b In the diagram of short-time Fourier transformation, the response at the frequency of 77.5 Hz can be excited by a stimulus of 77.5 Hz or 155 Hz. c When the applied voltage frequency is fixed at 77.5 Hz, the response is harmonic. d When the applied voltage frequency is fixed at 155 Hz, the response is sub-harmonic
The voltage was applied by a functional signal generator (Agilest 33500B) and a high-voltage amplifier (TREK 610E). The alternating excitation signal is \(\varPhi (t)=\varPhi _{\mathrm{dc}} +\varPhi _{\mathrm{ac}} \hbox {sin}(\varOmega t)\), where \(\varPhi _{\mathrm{dc}} \) is the amplitude of DC voltage, \(\varPhi _{\mathrm{ac}} \) is the amplitude of AC voltage, and \(\varOmega \) is the frequency. According to the theory of dielectric elastomer [25], the effective force applied on the membrane is \(\varepsilon ({\varPhi (t)}/h)^{2}\), where \(\varepsilon \) is the permittivity and h is the current thickness when voltage is applied. Therefore, the applied excitation stimuli have two frequency components, \(\varPhi _{\mathrm {dc}} \varPhi _{\mathrm {ac}}\hbox { sin}(\varOmega t)\) and \(\varPhi _{\mathrm{ac}}^2 \hbox {sin}^{2}(\varOmega t)\). The harmonic and super-harmonic responses are easily expected even if the system is a linear one. The sub-harmonic responses under such excitation signals are more interesting for such a highly nonlinear system.
We applied a linear sweep signal \(\varPhi (t)=\varPhi _{\mathrm{dc}} +\varPhi _{\mathrm{ac}} \sin (kt^{2})\) with the frequency range of 1–500 Hz. The sweeping time is 100 s. The AC component is \(\varPhi _{\mathrm{ac}} =750\) V, the DC component is \(\varPhi _{\mathrm{dc}} =3000\) V, and the equivalent voltage \(\varPhi _{\mathrm{eq}} =\varPhi _{\mathrm{dc}} +\varPhi _{\mathrm{ac}} /\sqrt{2}\) is 3530.4 V. Different stimuli with combinations of AC and DC components are discussed later in detail. The deformation processes were photographed with a camera. The modal shapes at several specific frequencies can be roughly recognized by the difference in the brightness of membrane surface (Fig. 1b). The bright region corresponds to peaks and the dark region corresponds to valleys. When the excitation signal was static, the membrane only expanded in the plane. When the excitation frequency was about 10 Hz, the membrane wrinkled into a complex pattern. As the excitation frequency further increased, the out-of-plane vibrations occurred. At the frequency of 170 Hz, a clear single peak was observed at the center; at the frequency of 460 Hz, a symmetric double-peak pattern was observed; at the frequency of 660 Hz, five peaks with a centrosymmetric distribution was observed; and at higher frequencies, more complex patterns appeared.
3 Sub-harmonic Response
We replaced the camera with a laser vibrometer (KEYENCE LK-H150) to quantitatively measure the vibrations. The vibrometer was directly pointed to the center of the membrane. In order to highlight the sub-harmonic response, we set the excitation signal as \(\varPhi _{\mathrm{eq}} =3111.3\) V and the ratio of equivalent AC component to DC component as \(\varPhi _{\mathrm{ac}} /\sqrt{2}\varPhi _{\mathrm{dc}} =9:13\). A linear sweep signal ranging from 1 Hz to 500 Hz was applied. The sampling frequency was 5 kHz. Figure 2a shows the measured displacement as a function of sweep time, and equivalently, the applied excitation frequency. Large displacement was observed at the frequencies of 342–351 Hz, 358–386 Hz, and 382–417 Hz. At the frequency of 411 Hz, the out-of-plane displacement reached 1.34 mm. This peak was recognized as one of the resonances. Figure 2b shows the diagram of response frequency and sweep time through a short-time Fourier transformation. The yellow points represent the proportion of the response frequency under a given applied excitation frequency. For example, when the excitation frequency is 168 Hz, the response frequencies include the harmonic component at 168 Hz, the sub-harmonic component at 84 Hz, and the super-harmonic component at 336 Hz. The brightness represents the intensity of the response at different frequencies. The strong sub-harmonic responses are marked by circles, which correspond to several discrete regions of excitation frequency. In other words, at the excitation frequencies out of these regions, the responses only consist of the harmonic component and the super-harmonic component.

The effect of equivalent voltage on sub-harmonic responses, with the AC/DC ratio fixed at 1:1: a the displacement response as a function of sweep time; b the response frequency as a function of sweep time through a short-time Fourier transformation
From the measured displacement responses in Fig. 2a, because of the co-existence of harmonic, super-harmonic and sub-harmonic components, one cannot determine the corresponding relationships between the excitation frequency and the response frequency. Figure 3a shows another example with the excitation signal of \(\varPhi _{\mathrm{eq}} =3121\) V and the ratio of equivalent AC component to DC component being 100:47. Two clear peaks were observed at 77.5 Hz and 155 Hz, respectively. Figure 3b shows the results through a short-time Fourier transformation. When the applied excitation frequency was 77.5 Hz, the membrane resonated at 77.5 Hz with a harmonic response; and when the applied excitation frequency was 155 Hz, the membrane also resonated at 77.5 Hz, but with a sub-harmonic response. To further validate this phenomenon, we used the signal at a specific frequency rather than a sweep signal. Figure 3c–d clearly shows that when the applied frequency is 77.5 Hz, the response is harmonic; and when the applied frequency is 155 Hz, the response is sub-harmonic.
4 Parametric Study
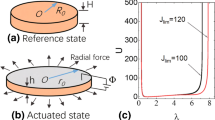
Two important parameters affect the nonlinear vibration responses. One is the equivalent voltage; the other is the ratio of equivalent AC component to DC component. Figure 4a shows the displacement response as a function of sweep time at a fixed AC/DC ratio of 1:1. Figure 4b shows the corresponding results through a short-time Fourier transformation. As the equivalent voltage increases, the responses become more and more complex and the number of detectable resonances increases. When the equivalent voltage is 2545.6 V, there are almost no sub-harmonic responses in the range of 1–500 Hz. When the equivalent voltage is 3394.1 V, the sub-harmonic responses appear in the ranges of 362–372 Hz and 444–468 Hz. When the equivalent voltage increases to 3959.8 V, the frequency range of sub-harmonic response expands further. Figure 5 shows the effect of AC/DC ratio on sub-harmonic response while the equivalent voltage is fixed at 3111.3 V. When the AC/DC ratio is large, the sub-harmonic response is hardly to detect. As the DC component increases, the frequency range for sub-harmonic responses becomes larger. Therefore, the equivalent voltage and the AC/DC ratio are two key factors that trigger the sub-harmonic responses.

The effect of AC/DC ratio on sub-harmonic responses, with the equivalent voltage fixed at 3111.3 V: a the displacement response as a function of the excitation frequency; b the response frequency as a function of sweep time through a short-time Fourier transformation

a In the first 10 s of excitation, the membrane vibrates in one mode at the frequency of 360 Hz; b after 10 s, the vibration of membrane switches to another mode automatically at the frequency of 180 Hz; c the response history: harmonic response at 360 Hz, sub-harmonic response at 180 Hz, no response, then repeat
5 Mode Shift
We observed the phenomenon of mode shift in the experiments. For example, when the equivalent voltage was 3677.0 V, the AC/DC ratio was 16:5, and the frequency was 360 Hz, during the first 10 seconds after the excitation voltage signal was applied, there were three brighter areas on the dielectric elastomer film (Fig. 6a). Through Fourier transformation, we found that the response frequency was 360 Hz. This mode was stabilized for about 10 seconds. After that, the responses changed to another mode automatically, where two brighter areas appeared (Fig. 6b). Through Fourier transformation, we found that the response frequency was 180 Hz. The new responses were stabilized afterward. If we totally removed the voltage at \(t=30\) s, waited for 15 s, and applied the same excitation signal at \(t=45\) s, exactly the same mode shift was observed. The response history is shown in Fig. 6c: harmonic response at 360 Hz, sub-harmonic response at 180 Hz, no response, then repeat. We speculate that this mode shift could be related to the chaotic vibration of dielectric elastomers as reported before [21]. Since VHB 4905 is a highly viscous material, the viscous damping will definitely play a role, which deserves further study.
6 Conclusions
Experiments are conducted to observe the nonlinear vibration behaviors of a circular dielectric membrane under alternating excitation. We find that when the excitation frequency is lower than 10 Hz, wrinkles are observed. With the increase of excitation frequency, the vibration patterns of membrane become more complex. The nonlinear resonances including the harmonic, super-harmonic and sub-harmonic responses are analyzed through a short-time Fourier transformation. The effects of equivalent voltage and the ratio of equivalent AC component to DC component on sub-harmonic responses are studied. As the equivalent voltage increases, or as the DC component increases, the frequency range of sub-harmonic response gradually expands. The phenomenon of mode shift is also observed under certain excitation conditions. These experimental observations provide a deeper understanding of the dynamic responses of dielectric elastomer subject to electromechanical loads. Due to the complex moving boundaries of the current configuration, theoretical analysis on the out-of-plane dynamic deformation is quite difficult. It is hoped that finite element calculations can be used to analyze these observations in further detail.
References
Trivedi D, Rahn CD, Kierb WM, Walker ID. Soft robotics: biological inspiration, state of the art, and future research. Appl Bion Biomech. 2008;5(3):99–117.
Siegfried B, Simona BG, Ingrid G, Martin K, Christoph K, Reinhard SD. 25th anniversary article: a soft future: from robots and sensor skin to energy harvesters. Adv Mater. 2014;26(1):149–62.
Anderson IA, Gisby TA, Mckay TG, O’Brien BM, Calius EP. Multi-functional dielectric elastomer artificial muscles for soft and smart machines. J Appl Phys. 2012;112(4):041101–20.
Polygerinos P, Correll N, Morin SA, Mosadegh B, Onal CD, Petersen K, et al. Soft robotics: review of fluid-driven intrinsically soft devices; manufacturing, sensing, control, and applications in human–robot interaction. Adv Eng Mater. 2017;19(12):22.
Bar-Cohen Y. EAP as artifical muscles—progress and challenges. In: BarCohen Y, editor. Smart Structures and Materials 2004: Electroactive Polymer Actuators and Devices. Proceedings of the society of photo-optical instrumentation engineers (SPIE). Bellingham: SPIE—Int Soc Optical Engineering; 2004. p. 10–6.
Li J, Liu L, Liu Y, Leng J. Dielectric elastomer spring-roll bending actuators: applications in soft robotics and design. Soft Robot. 2019;6(1):69–81.
Pelrine R, Kornbluh R, Pei QB, Joseph J. High-speed electrically actuated elastomers with strain greater than 100%. Science. 2000;287(5454):836–9.
Paul B, Qibing P. Advances in dielectric elastomers for actuators and artificial muscles. Macromol Rapid Commun. 2010;31(1):10–36.
Wang Q, Gossweiler GR, Craig SL, Zhao X. Cephalopod-inspired design of electro-mechano-chemically responsive elastomers for on-demand fluorescent patterning. Nat Commun. 2014;5:4899.
Pope KL, Snyder AJ. Pressure–volume characteristics of dielectric elastomer diaphragms. Proc SPIE Int Soc Opt Eng. 2003;5051:159–69.
Carpi F, Bauer S, De Rossi D. Stretching dielectric elastomer performance. Science. 2010;330(6012):1759–61.
Goulbourne N, Frecker MI, Mockensturm EM, Snyder AJ. Modeling of a dielectric elastomer diaphragm for a prosthetic blood pump. Proc SPIE Int Soc Opt Eng. 2004;5385:122–33.
Herr H, Kornbluh R. New horizons for orthotic and prosthetic technology: artificial muscle for ambulation. In: BarCohen Y, editor. Smart structures and materials 2004: electroactive polymer actuators and devices. Proceedings of SPIE, 2004. p. 1–9.
Heydt R, Pelrine R, Joseph J, Eckerle J, Kornbluh R. Acoustical performance of an electrostrictive polymer film loudspeaker. J Acoust Soc Am. 2000;107(2):833.
Dubois P, Rosset S, Niklaus M, Dadras M, Shea H. Voltage control of the resonance frequency of dielectric electroactive polymer (DEAP) membranes. J Microelectromech Syst. 2008;17(5):1072–81.
Heydt R, Kornbluh R, Eckerle J, Pelrine R. Sound radiation properties of dielectric elastomer electroactive polymer loudspeakers. Proc SPIE Int Soc Opt Eng. 2006;6168(3):135–40.
Christoph K, Jeong-Yun S, Choon Chiang F, Philipp R, Whitesides GM, Zhigang S. Stretchable, transparent, ionic conductors. Science. 2013;341(6149):984–7.
Mockensturm EM, Goulbourne N. Dynamic response of dielectric elastomers. Int J Non-Linear Mech. 2006;41(3):388–95.
Jia K, Wang M, Lu TQ, Zhang JH, Wang TJ. Band-gap tunable dielectric elastomer filter for low frequency noise. Smart Mater Struct. 2016;25(5):055047.
Jian Z, Cai S, Suo Z. Resonant behavior of a membrane of a dielectric elastomer. Int J Solids Struct. 2010;47(24):3254–62.
Wang F, Lu T, Wang TJ. Nonlinear vibration of dielectric elastomer incorporating strain stiffening. Int J Solids Struct. 2016;87:70–80.
Jian Z. Instability in nonlinear oscillation of dielectric elastomers. J Appl Mech. 2015;82(6):061001.
Lv X, Liu L, Liu Y, Leng J. Dynamic performance of dielectric elastomer balloon incorporating stiffening and damping effect. Smart Mater Struct. 2018;27(10):105036.
Fox JW, Goulbourne NC. On the dynamic electromechanical loading of dielectric elastomer membranes. J Mech Phys Solids. 2008;56(8):2669–86.
Suo Z. Theory of dielectric elastomers. Adv Mech. 2011;41(6):730–50.
Lu T, Huang J, Jordi C, Kovacs G, Suo Z. Dielectric elastomer actuators under equal-biaxial forces, uniaxial forces, and uniaxial constraint of stiff fibers. Soft Matter. 2012;8(22):6167–73.
Lu T, Shi Z, Shi Q, Wang TJ. Bioinspired bicipital muscle with fiber-constrained dielectric elastomer actuator. Extreme Mech Lett. 2016;6:75–81.
Suo Z, Zhao X, Greene WH. A nonlinear field theory of deformable dielectrics. J Mech Phys Solids. 2008;56(2):467–86.
Liu L, Liu Y, Luo X, Bo L, Leng J. Electromechanical instability and snap-through instability of dielectric elastomers undergoing polarization saturation. Mech Mater. 2012;55(14):60–72.
Acknowledgements
TL acknowledges the support of NSFC (11772249) and Young Elite Scientist Sponsorship Program by CAST (2016QNRC001).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Ma, C., Yang, M., Jia, K. et al. Experimental Investigations on the Out-of-Plane Sub-harmonic Vibration of a Circular Dielectric Elastomer Actuator. Acta Mech. Solida Sin. 32, 591–598 (2019). https://doi.org/10.1007/s10338-019-00105-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10338-019-00105-7