
Abstract
The Red Kite has come to the forefront of general consciousness in recent decades. A major contributing factor has been repeated collisions of these raptors with wind turbines and the important role they play in the approval process for new turbines. Efforts to improve their protection sometime encounter challenges due to limited knowledge about some life history aspects, e.g., their flight altitude and flight activity. We investigated these parameters from 2012 to 2018 in an approximately 1000-km2 study area in the vicinity of Weimar (Federal State of Thuringia, Federal Republic of Germany) in 29 breeding birds (19 males and 10 females) equipped with GPS loggers. In addition to more than 11 million GPS data records, accelerometer data from the loggers were evaluated. The start of morning activities correlated with sunrise. Most frequently, Red Kites initiated their first hunting flights immediately at sunrise; males started hunting at 9 min and females started hunting at 12 min after sunrise (medians). The Red Kites mostly foraged and hunted their prey during flight. The proportion of time spent flying during their activity phase was highest during midday hours, reaching 30–80% in males depending on the phase of the breeding season. For males, the time spent flying was approximately two and a half times that for females. The birds sporadically reached flight altitudes of up to 1600 m above ground in the breeding area, while they maintained lower altitudes between 5 and 60 m more frequently and predominantly while foraging (56% of location fixes). Higher altitudes were occupied much less frequently than lower altitudes and were often used to travel relatively long distances in an energy-saving manner. The end of activity was well before sunset, at 87 min prior to sunset for males and 154 min prior to sunset (medians) for females.
Zusammenfassung
Telemetrisch ermittelte Flughöhen und Flugaktivitäten von adulten Rotmilanen ( Milvus milvus) im Brutgebiet
Der Rotmilan ist in den letzten Jahrzehnten im allgemeinen Bewusstsein stark in den Vordergrund gerückt. Wesentlich dazu beigetragen hat die Problematik, dass Rotmilane immer wieder an Windkraftanlagen verunglücken und deshalb eine wichtige Rolle bei der Genehmigung neuer Anlagen spielen. Die Bemühungen, ihren Schutz zu verbessern, stoßen teilweise auf Schwierigkeiten in Anbetracht der geringen Kenntnisse, z.B. bezüglich ihrer Flughöhe und Flugaktivität. Wir untersuchten diese Parameter von 2012 bis 2018 in einem ca. 1000 km2 großen Untersuchungsgebiet in der Umgebung von Weimar (Bundesland Thüringen, Bundesrepublik Deutschland) anhand von 29 Brutvögeln (19 Männchen und 10 Weibchen), die mit GPS-Loggern ausgestattet wurden. Neben über 11 Millionen GPS-Datensätzen erfolgte ebenfalls die Auswertung der in den Loggern befindlichen Beschleunigungssensoren. Der morgendliche Aktivitätsbeginn korrelierte mit dem Sonnenaufgang. Am häufigsten begannen die Rotmilane ihre ersten Jagdflüge direkt bei Sonnenaufgang, Männchen 9 und Weibchen 12 min (Median) danach. Rotmilane suchten und erbeuteten ihre Nahrung zum großen Teil im Flug. Der Anteil der Zeit, den Sie während ihrer Aktivitätsphase fliegend verbrachten, war in den Mittagsstunden am höchsten und erreichte bei den Männchen je nach Brutzeitphase 30% bis 80%. Gegenüber den Weibchen verbrachten sie etwa die zweieinhalbfache Zeit fliegend. Die Vögel nutzten im Brutgebiet vereinzelt Flughöhen bis zu 1600 m über Grund, wobei niedrigere Höhen zwischen 5 und 60 m häufiger und vorwiegend bei der direkten Nahrungssuche genutzt wurden (56% der Ortungen). Größere Höhen wurden zunehmend weniger genutzt. Sie dienten oft zum energiesparenden Überwinden größerer Entfernungen. Das Aktivitätsende lag deutlich vor dem Sonnenuntergang, bei den Männchen 87 und bei den Weibchen 154 min (Medianwerte) davor.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The Red Kite is a now well-studied, medium-sized bird of prey whose range is restricted to specific parts of Europe (Aebischer and Scherler 2021). Most breeding birds in central Germany do not spend the winter in the breeding area, but migrate to Iberia or southern France (Pfeiffer & Meyburg 2009; Bairlein et al. 2014). In the European Red List of Birds, its status was downgraded from “Near Threatened” to “Least Concern” in 2021 (BirdLife International 2021). This optimistic assessment of this species situation throughout its range seems doubtful. For example, the population is declining in several key areas (e.g., most of Spain) (Aebischer and Sergio 2020; Sergio 2019; 2021). In Germany, too, there are indications that the total population is not as healthy as it seems when considering only the number of breeding pairs (Katzenberger et al. 2021). Due to its small range, variability in population development and its vulnerability to anthropogenic mortality risks, strict protection remains essential.
Red Kites mainly use open landscapes, including settlements, for foraging and are thus closely associated with areas utilised for agriculture. Breeding takes place almost exclusively in tree nests in copses, tree colonnades, forests, individual trees and increasingly in settlements (Ortlieb 1989; Heuck et al. 2013; Nicolai et al. 2017). The predominant hunting methods are search flights and, more rarely and with only a limited or lack of vegetation cover, ground hunting (Hille 1995; Walz 2005). As distinct soaring birds, Red Kites are more affected by collisions with power lines and wind turbines than raptors that employ other hunting methods. With the proliferation of wind power plants in Germany in recent years, the Red Kite has been increasingly entangled in the conflict between energy transition and species conservation (e.g.Langgemach and Dürr 2021; Bellebaum et al. 2013; Kolbe et al. 2019). Sprötge et al. (2018) classified the mortality risk of wind turbines for Red Kites as “high”. To reduce the collision risk, more precise information on flight heights and flight activities, as well as that in relation to weather events, is increasingly required. Thus far, data on flight altitude have been collected through only relatively imprecise individual observations. These observations do not allow for the continuous monitoring of flight activity throughout the day and were mostly subjective assessments. Modern telemetry methods represent a “quantum leap” in the gain of knowledge and offer the possibility to collect a multitude of data using automated measurement methods, providing a picture independent of subjective observations.
Materials and methods
All studies relate to only the period in which the birds were situated in the breeding area.
Transmitters and study area
The study is based on 29 breeding birds (19 males and 10 females) that were tagged with GPS loggers from the manufacturer e-obs GmbH (Grünwald, Germany) from 2012 to 2018 in an approximately 1000-km2 study area around Weimar (Federal State of Thuringia, Federal Republic of Germany, 50° 59' N, 11° 19′ E). These loggers, weighing 15–25 g, had a rechargeable battery charged by a solar panel as well as a GPS module and, among other sensors, a three-dimensional accelerometer (ACC). The loggers were programmed to determine and store the bird's location via GPS from approximately 1 h before sunrise to approximately 1 h after sunset. The timing of the fixes was determined by the state of charge of the battery. If the minimum charge level was reached, GPS fixes were made every 20 min. At medium charge, fixes were made at 5-min intervals. When the battery charge was very good, 12 of the transmitters (on 7 males and 5 females) were able to activate the GPS module continuously and record location fixes every second (so-called 1-Hz fixes). The integrated accelerometer was programmed to record at least 78 readings at a frequency of 20 Hz per axis every 5 min, providing information about the bird's movement and position. Since ACC measurements consume very little energy, they still provided data even when GPS tracking had been reduced or turned off due to low battery voltage.
This evaluation included a total of 11,473,174 GPS locations provided by the loggers from 2012 to 2018 during the birds’ stay in the breeding area. The abundance of Red Kites in the study area was approximately ten breeding pairs per 100 km2 (Pfeiffer 2012).
Breeding season phases
We calculated the time intervals of the individual breeding season phases per brood from the fledgling stage (usually determined by wing length during ringing) (Pfeiffer and Meyburg 2015). The breeding season phases, based on the hatching date (H) of the oldest fledgling, were calculated as follows: territory occupation and courtship: 1 March to H-34 days; incubation of the clutch: H-33 to H-1 days; small fledglings in the nest: H to H + 25 days (female broods and guards); large fledglings in the nest: H + 26 to H + 53 days (female increasingly participates in foraging); and postfledging-dependent period: H + 54 to H + 75 days.
Determination of the activity phase
To determine the morning onset of activity, we first determined the roosting site for the previous night and then searched for the first GPS fix that occurred more than 200 m from the roost site. This ensured the exclusion of both erroneous measurements due to inaccurate GPS locations and small-scale changes in the roost tree, which sometimes occur due to disturbances during the nocturnal rest period. Analysis of many individual data points showed that a GPS fix at this distance from the roost almost always represented the beginning of the first hunting flight. The last roost was considered to be the position of the first location fix of the day if it was less than 200 m away from the evening roost of the previous day or no further than 200 m from the eyrie. The beginning of activity was considered to be the midpoint in time between the last location at the roost and the first location that was more than 200 m away from the roost. The analysis included only those days on which GPS fixes were made during the period between the onset of activity and sunrise at 5-min intervals or more often.
Similarly, the end of activity was calculated as the midpoint in time between the last fix in the activity phase and the first location at the evening roost. Here, the last fix of the day was assumed to be the evening roost if it was less than 2 h before or after sunset. Additionally, it could not be more than 200 m from the next morning’s roost. Again, only those days on which there were consistent GPS fixes at least every 5 min from the end of activity until sunset were considered. Only data from years in which the respective birds successfully raised fledglings were used. For females, the period of incubation of the clutch and rearing of small young was not included in the evaluation, as females fly very little during this period. The transmitters were thus only partially charged, and consequently, there were only a few days with location fixes every 5 min around sunrise and sunset. As there were not enough fixes in the morning and evening hours from one transmitter, only the locations of 28 Red Kites (18 males and 10 females) were used for this part of the evaluation. In total, data from 2093 bird-days and 2478 bird-days were available for the determination of the onset of morning activity and the end of activity, respectively.
Determination of flight activity
A decision tree (Supplementary Information (SI) Fig. S1 for details) was used to determine if a bird was flying at a particular time. Primarily, the information from the acceleration (ACC) sensor (Nathan et al. 2012) and, if necessary, the data from the GPS module, were analysed. The former was significantly influenced by the earth’s gravity and allowed the formation of conclusions about the position of the logger and thus the bird’s posture. By assessing the pitch of the head–tail axis, it was immediately possible to tell whether the bird was sitting upright or was in a largely horizontal flight posture. There was a possibility of confusion only between gliding and incubating birds in the eyrie. In this case, the activities were differentiated by the distance from the nest and the time window of incubation. If a transmitter was in continuous GPS mode (1 Hz tracking), no ACC measurements were collected. In this case, however, the bird’s behaviour could be easily identified from the continuous GPS locations (distance to the previous location, speed, accuracy of the speed and flight altitude above the ground). For each hour in the activity phase and at 5-min intervals, whether the bird was in flight was determined. This allowed us to investigate at which times of the day kites fly and how frequently. In each case, the first location or measurement in the 5-min interval was used for the evaluation. For the 1-Hz fixes, only the fifth location was assessed, as it provided more accurate results than a single measurement or the first measurement of a 1-Hz sequence. Only those hours for which GPS fixes or ACC measurements existed for all 12 5-min intervals were included in the analysis. A total of 10,451 bird-days were included in the analysis, for which 12 measurements were available for at least 1 h.
Determination of the flight altitude
For the determination of the flight altitude, a total of 8,798,033 fixes from breeding birds that were in flight were analysed. The altitude data related to each fix, which were provided by the GPS modules in the transmitters, referred to the WGS84 ellipsoid. Since the terrain elevations determined via the Google Maps elevation service (Google Maps platform) for each GPS point referred to mean sea level, a corresponding correction for the geoid undulation was essential (Poessel et al. 2018). However, this was constant within the study area and was determined using 1:25,000-scale topographic maps from the Thuringian State Survey Office. The aboveground flight altitude was then determined from the adjusted GPS altitude minus the terrain elevation.
For all the loggers, initial tests were performed at a location with a known position and altitude before they were attached to the bird. The goal was to verify functionality and measurement accuracy. In addition, the ACCs were calibrated. The tests showed that the mean values of the altitude measurements were quite accurate and never deviated from the reference altitude by more than 1.6 m for all transmitters. However, the scatter was relatively high, and there were outliers of several 100 m. This was especially true for single location fixes or the first fix of a continuous 1-Hz measurement sequence; the standard deviation (SD) was 48 m. The scatter of the altitude readings for the 1-Hz sequences became progressively smaller with increasing temporal distance from the beginning of the sequence. For all test fixes from the 11th second after the start of a 1-Hz sequence, the SD was only 5 m (SI Fig. S8). Therefore, for the comparison of subgroups (e.g., sex, different breeding season phases) and associations with weather data, only the more accurate 1 Hz data from the 11th second (1 Hz–10 s data) were used for model construction. In addition to the content-related limitation of the value range (exclusion of nonpositive flight altitudes, which can arise due to measurement errors in the difference of the GPS altitude values adjusted for geoid undulation and terrain height), a sex-specific limitation of the upper value range was accounted for by considering that 1% of the highest flight altitudes were potentially errors and thus excluded. The total number of 1-Hz flight altitude data points used in the analysis was thus 6,676,742 fixes.
However, 1-Hz sequences occurred only when the transmitter battery was in a good state of charge, which in turn depended on how often the bird flew and whether the transmitter was exposed to sufficient sunlight. To determine the size of the deviations in the 1-Hz flight altitudes compared to data that were collected in good and bad weather conditions, an additional evaluation of a further data set was carried out; this evaluation considered only locations where the bird was flying and time intervals of at least 5 min. Such fixes were largely available from most birds except for a few females during the period of incubation of the clutch. After cleaning the data to remove computationally nonpositive flight altitudes and recognisable outliers, 319,739 altitude values were included in the data set.
Meteorological data
To investigate the influence of precipitation, sunshine duration and wind speed on activity and flight altitude, these meteorological factors were additionally included in the data analysis. Weather data were obtained by querying the Environmental Data Automated Track Annotation system (Env-DATA) (Dodge et al 2013) in Movebank (Kays et al. 2021) for the respective data points, which provided data from the European Centre for Medium-range Weather Forecasts (European Centre for Medium-range Weather Forecast 2011). The weather parameters were average values over a model grid box of 0.75° and 3-h time steps. The reference area corresponding to the study area was approximately 53 × 83 km. Only wind speeds up to 10 m/s were included in the analysis since faster speeds were rare, and thus, the number of data points was too small for evaluation.
Statistical analyses
The processing of the raw data and the statistical analyses were performed with SAS 9.4 software (SAS Institute Inc., Cary, NC, USA). All statistical significance tests were carried out considering a five percent error probability. Due to the exploratory nature of the present study, correction for multiple testing was not foreseen.
Determination of daily activity start and activity end
The correlation between sunrise and activity start and between sunset and activity end was analysed using Pearson correlation and Spearman rank correlation analyses. A comparison of the start and end of observed activity, representing the temporal difference between sunrise and the first measured activity and the temporal difference between the last measured activity and sunset, respectively, was performed using a mixed linear regression model considering breeding season phase and sex as fixed factors, as well as the time of sunrise and sunset. Individual differences between animals were accounted for in the model by adding the animal as a random factor. Differences between subgroups (e.g., sexes) estimated from the regression model were expressed directly as temporal differences and represent the differences in estimated subgroup-specific daily activities.
Flight activity in breeding season phases
The comparison of the relative flight activity, which in each case represents the proportion of readings “in flight” among the available measurements, was performed using a Poisson regression model. In this model, “readings in flight”, which were represented by count data and were considered the dependent variable, was described by the linear combination of the independent explanatory variables of sex, breeding season phase, and hourly interval. Additionally, the interaction of breeding time phase and sex was analysed. The observed number of measurements “in flight” depended on the number of available measurements (i.e., “in flight” and “at rest”). Thus, from a content point of view, the proportion was modelled instead of the absolute number. This was realised by considering the different number of underlying measurements on the individual aggregation level as offsets. Several observations of an animal were included in the model (e.g., several breeding phases; several hourly intervals per breeding phase). Accordingly, modelling of repeated measures was performed; observations from different individuals were assumed to be independent, whereas multiple responses from the same subject were assumed to be correlated. The differences between subgroups (e.g., sexes) estimated from the Poisson regression model are expressed as relative risks (RRs) and represent the quotient of the estimated subgroup-specific flight activities.
Accuracy of GPS altitude measurements
The analysis of the test measurements, based on altitude differences, was primarily descriptive. The variation in the altitude difference related to a specific point in time was additionally determined as residual scatter in a linear model with a random logger effect to detect logger-specific measurement differences. There were no significant differences among loggers in the current study.
Flight altitudes
The comparison of flight heights was performed using a mixed log-linear regression model (log-transformation: natural logarithm) considering breeding success and sex as independent explanatory variables. In addition, the interaction of breeding success and sex was analysed. The fact that the data were dependent observations (multiple observations in different years per animal) was taken into account as a random effect (transmitter number and year). Data from nonbreeders were not included in the analysis, as these data were available for only one male. Differences between subgroups (e.g., sexes) estimated from the regression model are interpreted as ratios (due to log scaling).
Meteorological influencing factors
In the data analyses, the weather data related to precipitation, sunshine duration and wind speed were additionally considered, i.e., in addition to the primary analysis, meteorological influences were included in corresponding models as additional explanatory variables. The results provide information about the estimated effect size as well as the statistical significance of the meteorological factors. In addition, sex-specific models derived from a limited database comprising either males or females were constructed.
Results
Daily activity period
The beginning of the activity period was determined by sunrise, and the end was determined by sunset (see Fig. 1 and SI Tab. S1, Fig. S2, S3, S4 and S5). Most frequently, Red Kites started their first hunting flights at sunrise and within 30 min before and after it (Fig. 2). On relatively few days, however, the Kites initiated activity later; the median activity start time for males was 9 min and for females was 12 min after sunrise.

Activity onset of Red Kite males during the breeding season compared to sunrise

Frequency of temporal differences in activity onset—sunrise for Red Kite males in the breeding area
The end of activity for the Red Kites usually occurred well before sunset. The median time difference between the end of activity and sunset was − 87 min and − 154 min for males and females, respectively. However, the variability was significantly higher than for the activity start and sunrise time difference. On shorter days, the activity trend indicated an earlier start and later end relative to sunrise and sunset. This effect was more pronounced in females than in males (SI Figs. S6 and S7, Tabs. S2 and S3).
Because of the relationship between sunshine duration in 3-h intervals and sunrise and sunset, the analysis of the influence of weather data was carried out for only precipitation and wind. A significant influence of wind speed in the morning was detected. When the wind speed is increased by 1 m/s, the activity phase of the males starts 1 min and 56 s (00:01:56) earlier (p = 0.0075 CI − 00:03:21 to − 00:00:31), that of the females at 00:06:48 earlier (p = 0.0023 CI − 00:11:10 to − 00:02:27). As the wind data refer to large areas and are therefore not locally accurate or reliable, and the onset of activity of the females shows greater fluctuations (SI Fig. S3), it may be a random result. A few minutes earlier onset of activity is unlikely to have any biological relevance. An influence of precipitation was not observed for either sex in the morning or in the evening (SI Tab. S4).
Flight activity
During their stay in the breeding area from March to October, the proportion of time spent flying during the activity phase was 36% for males and 19% for females. However, this percentage changed significantly over the course of the season. Flight activity was highest when the young need to be provided with food, as well as around midday. In June, the mean values from 9 am to 1 pm Coordinated Universal Time (UTC) were 76% and 41% for males and females, respectively (Fig. 3). Furthermore, there were clear differences between the sexes up to the time when the offspring left the parental territories. The RR values in Table 1 show that males almost always fly more than twice as much as females during this period. During incubation, the difference was the largest, as the flight time in males was sixfold that in females. Even when the young were still small, the males flew more than three times more frequently than females.

Daily flight activities of Red Kite males and females during different phases of the breeding season. (For the numerical values, see SI Tab. S5 and S6.)
Table 2 shows the influences of the weather factors of precipitation, wind speed and sunshine duration on flight activity. While the effect of precipitation was so small that it was not considered relevant, a higher wind speed and longer sunshine duration led to more flight activity. For example, a wind speed increase of 2 m/s increased flight activity by approximately 8%. The influence of sunshine duration was even stronger. With each additional hour of sunshine, the proportion of time spent flying increased by approximately 9%.
Flight altitudes
Considering the entirety of the flight altitude data, a safe value for the maximum flight altitude above the ground was 1613 m. This measurement was obtained at the end of a 10-min 1-Hz sequence and can be considered very reliable, taking into account the temporally neighbouring detections with similarly high values. There were higher readings, but these did not occur within a 1-Hz sequence and were thus flagged as potential outliers. For the adjusted data set in the 5-min grid, the mean was 71 m (males 73 m, females 58 m), and the median was 41 m (males 42 m, females 37 m). The median flight height of the 1-Hz–10 s data set was only slightly different, at 45 m (males 46 m, females 36 m). The model did not indicate a significant difference in flight height for either sex or breeding phase.
Figure 4 shows that both sexes occupied an altitude range of 20–24 m most frequently. It is also clear that females flew relatively more often than males at lower altitudes up to approximately 78 m, above which the reverse was true. The Red Kite flight patterns showed very frequent changes between different altitude ranges (Fig. 5).

Proportions of flight altitudes occupied by male and female Red Kites

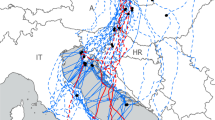
Example of the occupation of different altitude ranges of a male Red Kite on 21 June 2017. Only GPS locations from 1-Hz sequences are shown. The upper image shows the flight movements (red dots) of the bird on that day, including the height above the ground (white lines). Three longer flights between the eyrie area (left) and a hunting area (the arrows indicate the direction of flight) are clearly visible. The approximately 1300-m gliding flight in the background was quite straight, with the bird losing 170 m in height (177 to 5 m above the ground). The less-straight flight in the opposite direction was a search flight at a roughly constant altitude between approximately 30–70 m above the ground. The lower image presents the flight altitude profile of the bird in the time sequence. The gaps in the graph correspond to time periods when the bird was not flying or when there were no 1-Hz detections. Characteristics are the frequent change between different altitude ranges
When looking at the flight altitudes in different months, only small differences were observed for males from April to October. A slightly higher average flight altitude was noted in the morning (8:00–9:00 UTC) and in the afternoon (15:00–16:00 UTC for males and 14:00–15:00 UTC for females) when evaluating the flight altitudes in relation to the hour of the day (Fig. 6).

Monthly (a and b) and daily (c and d) profiles of the occupation of height ranges above the ground for Red Kite males and females during their stay in the breeding area; ♦ mean value; –median. (for the numerical values, see SI Tabs. S7 and S8)
The influences of the weather factors of sunshine duration, wind speed and precipitation on flight altitude are shown in Table 3. Similarly, the RR value for precipitation deviated only slightly from one, so the influence of this weather factor was not considered relevant. Wind speed and sunshine duration, on the other hand, had noticeable influences. A faster wind speed had a negative effect on flight altitude, and a longer sunshine duration had a positive influence on flight altitude in males. For example, an increase in wind speed of 1 m/s led to a reduction in a mean flight altitude of almost 10%. Each additional hour of sunshine increased the flight altitude of the males by more than 12%.
Discussion
Questions such as those addressed in this paper have been investigated only recently, within the last 10 years, due to improvements in transmitters and data loggers, which can transmit or record GPS locations and other data every minute or even every second (e.g., Wilmers et al. 2015); therefore, it is not surprising that there are very few, if any, publications on Red Kite and other species flight altitudes. Thaxter et al. (2015) provided a summary overview of the studies and methods available to date.
When assessing the influence of weather parameters, it is important to consider that weather data represent mean values for an area of approximately 4400 km2 and a 3-h period. While sunshine duration and wind represent relatively large-scale events, precipitation, especially in the summer months during the time of rearing young, is sometimes highly localised and limited in time. The assertions regarding the behaviour of birds during precipitation events are therefore limited to large-scale more or less humid weather conditions.
This study was highly exploratory; therefore, the results of statistical tests should be interpreted in this context. On the other hand, multiple testing could lead to false-positive study results. A correction of the alpha level (5%) would remedy this. Due to the different experimental approaches (comparisons between and within groups, correlations, models), we refrained from a formal procedure. However, since the majority of the p values were very low (< 0.0001), statistical significance would remain, even if the most conservative and simple approach, the Bonferroni correction regarding all tests would have been applied. If the alpha level of 0.05 would have been divided by approximately 50 tests, the corrected alpha level would be 0.001. Single p values considerably above this level should be interpreted with caution.
Daily activity period
To date, there are no similarly detailed studies analysing the daily start and end of activity in the Red Kite. The very close coupling of the onset of activity to sunrise is surprising, as one would have expected a more pronounced dependence on weather factors and on the breeding season phase. No influence of precipitation was detected, and the effects of wind on the onset of activity were too small to be biologically important. A considerable influence of these weather factors on the beginning and end of activity does not seem to be present. It is likely that the strongest driving force is hunger. This may partly explain days with a later onset of activity. If there is still left-over prey from the previous day, there is no need to begin the first hunting flight right at sunrise. The fact that the end of activity correlates with sunset is less surprising, even though the time of the end of activity is much more scattered and often takes place before sunset. Hunting success is likely to play a decisive role here.
Flight activity
As expected, the flight activity of Red Kites was highest during the nestling period, as the demand for food is higher than that during other periods, and search flights were the main hunting method during this time (Hille 1995; Walz 2005). The considerable difference between the sexes is largely a result of division of labour during the reproductive phase, which has also been found in other raptor species (e.g., Hernández-Pliego et al. 2017) using tri-axial accelerometers, a rather new technique in ornithology (e.g. Brown et al. 2013; Shepard et al. 2008). Even during the period of territorial occupation and courtship, it is usually the females that sit next to and guard the selected eyrie. Although they also participate in territorial defence, it is the males that hunt for prey during this phase, often presenting it to the female (courtship feeding). During incubation of the clutch, the females are only occasionally replaced by the males. The difference in flight activity is highest during this period. Even after the young have hatched, the males spend more time hunting than the females and therefore spend significantly more time flying. The females initially brood their nestlings most of the time and guard them sitting at the edge of the eyrie or from neighbouring trees when they grow larger; females gradually participate in hunting from approximately the third week after hatching. However, they never achieve the proportion of time that males spend on this activity. They also remain closer to the eyrie during this time (Pfeiffer and Meyburg 2015). For both sexes, the proportion of time spent flying was greatest around midday and in the early afternoon. This is typical for soaring species, as this is usually the time when thermals are at their strongest, which facilitates energy-efficient flying.
The positive influences of wind speed and sunshine duration were evaluated. Faster wind speeds lead to more orographic updrafts, while longer sunshine duration increases thermal updrafts. Using these updrafts, the birds can save energy and thus extend their flight times.
Similar findings were reported in a study from Hessen, Germany, which evaluated 74,767 fixes at 5-min intervals from six Red Kites (Heuck et al. 2019). Flight activity, determined exclusively by GPS speed (> 10 km/h), increased until midday, as was observed in the 29 Thuringian birds in this study, and was approximately 61% at that time. The decline thereafter was gradual for the kites in Thuringia. Likewise, the study revealed that flight activity was highest during the rearing of the young.
We suspected a much stronger effect of precipitation since our personal observations indicated such. Sergio (2003) systematically observed that in the closest relative, the Black Kite, Milvus migrans, heavy precipitation caused the birds to refrain from hunting.
Flight altitudes
The dynamic use of different flight altitudes by Red Kites may be overlooked if merely the median or mean values are considered, as Péron et al. (2020) also noted. The constant change in flight altitudes is a key behavioural feature of this species. Lower altitudes between 5 and 60 m are mainly occupied during direct foraging, whereas higher altitudes are occupied to save energy when travelling longer distances. The birds use thermals to gain altitude. From there, they can glide towards their destination. If the initial altitude is insufficient, the process is repeated several times. This enables them to carry prey to the eyrie in an energy-efficient manner or to reach a better vantage point from which, for example, aggregations of other raptors or dust plumes from harvesting machines, indicating the presence of favourable food sources, can be located. This behaviour leads to a constant change in flight altitude during the day (Fig. 5). A longer sunshine period increases the thermal updrafts, which promotes activity at higher altitudes. Conversely, orographic updrafts, which are significantly influenced by wind speed, enable energy-saving flight, even at lower altitudes. This reduces the need to use thermal columns to save energy, and the average flight altitude is reduced.
Only minor differences existed between the median of the 5-min data set and that of the 1-Hz–10 s data set. As expected, it was slightly higher for the 1-Hz data, as this data were obtained only after the transmitter batteries had been sufficiently charged by sunshine beforehand. This was usually associated with stronger thermals, which in turn potentially facilitated the occupation of higher altitudes.
The fact that females occupied lower altitudes more frequently than males is probably also due to the different distribution of tasks during the breeding season. Since they stay much closer the eyrie in the period from territorial occupation in spring until the young grow, they do not require the higher flight altitudes often used to travel greater distances.
Information about Red Kite flight altitudes based on seven birds observed using VHF telemetry and three birds observed using GPS/Argos telemetry is presented in Mammen and Mammen (2013). In this study, flight altitude was assigned to six different altitude classes by the observers, and the results for the lower altitude ranges largely coincided with the results obtained in the current study.
The altitude measurements of Heuck et al. (2019) provide a good comparison. During the period from 2016 to 2018, six Red Kites were evaluated using GPS loggers with barometric altimeters. Flight altitudes below 100 m were detected for 80.5% of the fixes. Our study recorded a slightly lower value of 77% for the 1-Hz–10 s data. The distribution of the altitude ranges in the aforementioned study was also largely analogous to our results. Consistent with our studies, wind speed had a negative effect on altitude, while sunshine duration had a positive effect. An influence of precipitation could not be determined either.
The only possible comparison known to us at present with another species is the Lesser Spotted Eagle (Aquila pomarina). Flight activity in this species was also highest in the midday hours and early afternoon (50–75%) but started later in the morning (Meyburg and Meyburg 2020). This eagle needs more thermals than the Red Kite, but unlike the latter, it can do foot and perch hunting in the early morning when updrafts are still lacking. The difference in mean flight altitude, which is more than twice as high in the case of the Lesser Spotted Eagle, at approximately 200 m, also indicates biological relevance. At this altitude, Lesser Spotted Eagles, like other eagles, circle and search the ground for prey, while Red Kites perform lower, more active search flights.
Flight altitudes have been studied using very different methods, and most studies have been carried out during bird migration and when birds cross high mountains. Flight altitude data in the breeding range are rare and predominantly based on less reliable visual observations (e.g. Poessel et al. 2018; McClure et al. 2021). Considerable progress in the study of bird flight altitudes has recently been achieved through the development and improvement of telemetry technology (e.g. Wilmers et al. 2015; Péron et al. 2020). Previously, GPS measurements were considered inaccurate, but by collecting data every second, they have become accurate to within a few metres, so that with the latest tags, good measurements have become possible worldwide. This is becoming increasingly important, for example, for estimating collision risks with wind turbines.
References
Aebischer A, Scherler P (2021) Der Rotmilan. Haupt Verlag, Bern
Aebischer A, Sergio F (2020) Red Kite Milvus milvus. In: Keller V, Herrando S, Voříšek P, Franch M, Kipson M, Milanesi P, Martí D, Anton M, Klvaňová A, Kalyakin MV, Bauer H-G, Foppen RPB (eds) European breeding bird atlas 2: distribution, abundance and change. European Bird Census Council & Lynx Edicions, Barcelona, pp 474–475
Bairlein F, Dierschke J, Dierschke V, Salewski V, Geiter O, Hüppop K, Köppen U, Fiedler W (2014) Altas des Vogelzugs—Ringfunde deutscher Brut- und Gastvögel. Aula-Verlag, Wiebelsheim
Bellebaum J, Korner-Nievergelt F, Dürr T, Mammen U (2013) Wind turbine fatalities approach a level of concern in a raptor population. J Nature Cons 21:394–400
BirdLife International (2021) European Red List of Birds. Luxembourg: Publications Office of the European Union. https://www.birdlife.org/wp-content/uploads/2021/10/BirdLife-European-Red-List-of-Birds-2021.pdf. Retrieved 15 October 2021
Brown DD, Kays R, Wikelski M, Wilson R, Klimley AP (2013) Observing the unwatchable through acceleration logging of animal behavior. Anim Biotel 1(1):20. https://doi.org/10.1186/2050-3385-1-20
Dodge S, Bohrer G, Weinzierl R, Davidson SC, Kays R, Douglas D, Cruz S, Han J, Brandes D, Wikelski M (2013) The environmental-data automated track annotation (Env-DATA) system: linking animal tracks with environmental data. Movement Ecol 1:3. https://doi.org/10.1186/2051-3933-1-3
Hernández-Pliego J, Rodriguez C, Dell’Omo G, Bustamante J (2017) Combined use of tri-axial accelerometers and GPS reveals the flexible foraging strategy of a bird in relation to weather conditions. PLoS ONE 12(6):e0177892. https://doi.org/10.1371/journal.pone.0177892
Heuck C, Brandl R, Albrecht J, Gottschalk TK (2013) The potential distributionof theRed Kite in Germany. J Ornithol 154:911–921. https://doi.org/10.1007/s10336-013-0955-2
Heuck C, Sommerhage M, Stelbrink P, Höfs C, Geisler K, Gelpke C, Koschkar S (2019) Untersuchung des Flugverhaltens von Rotmilanen in Abhängigkeit von Wetter- und Landnutzung unter besonderer Berücksichtigung vorhandener Windenergieanlagen im Vogelschutzgebiet Vogelsberg—Abschlussbericht. Im Auftrag des Hessischen Ministeriums für Wirtschaft, Energie, Verkehr und Wohnen. file:///\\\\bk.bwl.net\\LUBW\\USERS\\Holzhause\\PROFILE\\Desktop\\FlugverhaltenRotmilan_Abschlussbericht_190923.pdf. Retrieved 27 October.2020
Hille S (1995) Nahrungswahl und Jagdstrategie des Rotmilans (Milvus milvus) im Biosphärenreservat Rhön/Hessen. Vogel Und Umwelt 8:99–126
Katzenberger J, Gottschalk E, Balkenhol N, Waltert M (2021) Density-dependent age of first reproduction as a key factor for population dynamics: stable breeding populations mask strong floater declines in a long-lived raptor. Anim Conserv 24:862–865. https://doi.org/10.1111/acv.12687
Kays R, Davidson SC, Berger M, Bohrer G, Fiedler W, Flack A, Hirt J, Hahn C, Gauggel D, Russell B, Kölzsch A, Lohr A (2021) The Movebank system for studying global animal movement and demography. Ecol and Evol. https://doi.org/10.1111/2041-210X.13767
Kolbe M, Nicolai B, Winkelmann R, Steinborn E (2019) Totfundstatistik und Verlustursachen beim Rotmilan Milvus milvus in Sachsen-Anhalt. Vogelwelt 139:141–153
Langgemach T, Dürr T (2021) Informationen über Einflüsse der Windenergienutzung auf Vögel. https://lfu.brandenburg.de/sixcms/media.php/9/Dokumentation-Voegel-Windkraft.pdf. Retrieved 28 October 2021
McClure CJW, Dunn L, McCabe JD, Rolek BW, Botha A, Virani MZ, Buij R, Katzner TE (2021) Flight altitudes of raptors in southern africa highlight vulnerability of threatened species to wind turbines. Front Ecol Evol 9:667384. https://doi.org/10.3389/fevo.2021.667384
Meyburg BU, Meyburg C (2020) Mindestabstände und Abschaltzeiten bei Windenergieanlagen zum Schutz des Schreiadlers (Clanga pomarina)—Empfehlungen basierend auf GPS-Telemetrie-Ergebnissen. Ber Vogelschutz 57:113–136
Nathan R, Spiegel O, Fortmann-Roe S, Harel R, Wikelski M, Getz WM (2012) Using tri-axial acceleration data to identify behavioral modes of free-ranging animals: general concepts and tools illustrated for griffon vultures. J Exp Biol 215:986–996
Nicolai B, Mammen U, Kolbe M (2017) Long-term changes in population and habitat selection of Red Kite Milvus milvus in the region with the highest population density. Vogelwelt 137:194–197
Ortlieb R (1989) Der Rotmilan. A. Ziemsen-Verlag, Wittenberg-Lutherstadt
Péron G, Calabrese JM, Duriez O, Fleming CH, García-Jiménez R, Johnston A, Lambertucci SA, Safi K, Shepard ELC (2020) The challenges of estimating the distribution of flight heights from telemetry or altimetry data. Anim Biotelemetry 8:1–13. https://doi.org/10.1186/s40317-020-00194-z
Pfeiffer T (2012) Die Brutbestände von Rotmilan Milvus milvus und Schwarzmilan Milvus migrans in Thüringen im Jahr 2010 mit Ergänzungen aus 2011. Anz Ver Thüringer Ornithologen 7:171–184
Pfeiffer T, Meyburg BU (2009) Satellitentelemetrische Untersuchungen zum Zug und Überwinterungsverhalten Thüringischer Rotmilane Milvus milvus. Vogelwarte 47:171–187
Pfeiffer T, Meyburg BU (2015) GPS tracking of Red Kites (Milvus milvus) reveals fledgling number is negatively correlated with home range size. J Ornithol 156:963–975. https://doi.org/10.1007/s10336-015-1230-5
Poessel SA, Duerr AE, Hall JC, Braham MA, Katzner TE (2018) Improving estimation of flight altitude in wildlife telemetry studies. J Appl Ecol 00:1–7. https://doi.org/10.1111/1365-2664.13135
Sergio F (2003) From individual behaviour to population pattern: Weather-dependent foraging and breeding performance in black kites. Anim Behav 66:1109–1117. https://doi.org/10.1006/anbe.2003.2303
Sergio F, Tanferna A, Chicano J, Blas J, Tavecchia G, Hiraldo F (2019) Protected areas under pressure: decline, redistribution, local eradication and projected extinction of a threatened predator in Doñana national park. Endanger Species Res 38:189–204. https://doi.org/10.3354/esr00946
Sergio F, Tavecchia G, Blas J, Tanferna A, Hiraldo F (2021) Demographic modeling to fine-tune conservation targets: importance of pre-adults for the decline of an endangered raptor. Ecol Appl 31:e2266. https://doi.org/10.1002/eap.2266
Shepard E, Wilson R, Quintana F, Gómez Laich A, Liebsch N, Albareda DA et al (2008) Identification of animal movement patterns using tri-axial accelerometry. Endanger Species Res 10:47–60
Sprötge M, Sellmann E, Reichenbach M (2018) Windkraft Vögel Artenschutz Ein Beitrag zu den rechtlichen und fachlichen Anforderungen in der Genehmigungspraxis. Books on demand, Norderstedt
Thaxter CB, Ross-Smith VH, Aonghais SCP (2015) How high do birds fly? A review of current datasets and an appraisal of current methodologies for collecting flight height data: Literature review. BTO Research Report No. 666
Walz J (2005) Rot- und Schwarzmilan. AULA-Verlag, Wiesbaden
Wilmers CC, Nickel B, Bryce CM, Smith JA, Wheat RE, Yovovich V et al (2015) The golden age of bio-logging: how animal-borne sensors are advancing the frontiers of ecology. Ecology 96:1741–1753. https://doi.org/10.1890/14-1401.1
Acknowledgements
We thank Thomas Keller and Stephan Weber (Acomed statistik) for their help with the statistical analysis, Stefanie Urban for linguistic help and two anonymous reviewers for their valuable remarks that helped improve the manuscript.
Funding
Partial financial support was received from the Thuringian Ministry of Agriculture, Forestry, Environment and Nature Conservation and the European Agricultural Fund for Rural Development (EAFRD) for subprojects involving long-term studies on the basis of the Funding Initiative Rural Development in Thuringia (FILET), especially the Förderung von Maßnahmen zur Entwicklung von Natur und Landschaft (ENL), the Dachverband Deutscher Avifaunisten e.V. and the Naturschutzbund Deutschland e.V.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflicts of interest
None to declare.
Ethical approval
Permission for trapping and attaching transmitters was granted by the Thuringian Ministry of Agriculture, Nature Conservation and Environment and the hunting authorities of the city of Weimar and the districts of Weimarer Land and Sömmerda.
Additional information
Communicated by O. Krüger.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Pfeiffer, T., Meyburg, BU. Flight altitudes and flight activities of adult Red Kites (Milvus milvus) in the breeding area as determined by GPS telemetry. J Ornithol 163, 867–879 (2022). https://doi.org/10.1007/s10336-022-01994-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10336-022-01994-1