
Abstract
Agriculture intensification drives changes in bird populations but also in the space use by farmland species. Agriculture in Eastern Europe still follows an extensive farming model, but due to policy shifts aimed at rural restructuring and implementation of government subsidies for farmers, it is being rapidly intensified. Here, we aimed to document the ranging behaviour and habitat use of a declining farmland bird of prey—Montagu’s Harrier—and to compare it to findings from Western Europe. In 2011–2018, 50 individuals were followed with GPS loggers in Eastern Poland to study species spatial ecology. We found home ranges (kernel 90%) to be considerably large: 67.3 (± 42.3) km2 in case of males, but only 4.9 (± 6.1) km2 in females. Home ranges overlapped by 40%, on average, with other males in colonies and by 61%, on average, between consecutive breeding seasons of a particular male. The average daily distance travelled by males and females reached, respectively, 94.5 and 45.3 km, covering a daily home range of 32.3 and 3.1 km2. Individuals foraged up to 35 km from nests (3.5 km on average). Daily distance travelled and daily home ranges varied across the breeding season, in case of females being shortest in July, but sharply increasing in August. Also, individuals with breeding success had higher daily distance travelled but smaller daily home ranges. Average harriers’ distance to nest was generally increasing over the season, but was also changing over time of day: birds were closest to nest during night time, but at the end of the season, males roosted up to 16 km from the nest. While foraging males slightly preferred grasslands, higher elevation and smaller land-use patches, they avoided slopes and proximity of roads. We conclude that the surprisingly large home ranges of breeding harriers may suggest reduced prey availability or high fragmentation of hunting areas, both driving birds to utilise large areas and potentially contributing to population decline.
Zusammenfassung
Jagdverhalten und -Gebiete der Wiesenweihe Circus pygargus auf extensiv bewirtschafteten Nutzflächen in Ostpolen
Eine landwirtschaftliche Intensivierung fördert Veränderungen in Vogelpopulationen, aber auch die Raumnutzung von Arten des Kulturlandes. Die Landwirtschaft in Ostpolen folgt noch immer dem Model der extensiven Bewirtschaftung, aber aufgrund der politischen Veränderungen, welche auf die ländliche Umstrukturierung und die Umsetzung der staatlichen Subventionen für die Bauern abzielen, kommt es derzeit zu einer extremen Intensivierung. Unser Ziel hier war es, das Jagdverhalten und -Gebiet einer rückläufigen Greifvogelart des Kulturlandes – der Wiesenweihe Circus pygargus – zu dokumentieren und diese mit den Ergebnissen aus Westeuropa zu vergleichen. Zwischen 2011–2018 wurden 50 Individuen mit GPS-Loggern in Ostpolen verfolgt, um die räumliche Ökologie der Art zu untersuchen. Wir fanden relativ große Jagdgebiete (Kernel 90 %): 67,3 (± 42,3) km² bei den Männchen, aber nur 4, 9 (± 6,1) km² bei den Weibchen. Im Durchschnitt überschnitten sich die Jagdgebiete zwischen den Männchen innerhalb der Kolonien um 40 % und die Gebiete in aufeinanderfolgenden Brutsaisons eines bestimmten Männchens um 61 %. Die von Männchen und Weibchen täglich zurückgelegten durchschnittlichen Jagddistanzen erreichten 94,5 bzw. 45,3 km, wobei ein tägliches Jagdgebiet von 32,3 und 3,1 km² abgedeckt wurde. Individuen jagten bis zu einer Entfernung von 35 km vom Nest (im Durchschnitt 3,5 km). Tägliche Jagddistanzen und –Gebiete unterschieden sich im Verlauf der Brutsaison, wobei diese für die Weibchen im Juli am kürzesten waren und im August rasant zunahmen. Weiterhin zeigten Individuen mit einem Bruterfolg längere tägliche Jagddistanzen und kleinere Jagdgebiete als Individuen ohne Bruterfolg. Die durchschnittliche Jagddistanz zum Nest nahm grundsätzlich im Laufe der Saison zu, veränderte sich jedoch auch im Tagesverlauf: Die Vögel waren während der Nachtzeit näher am Nest, während die Männchen zum Ende der Saison bis zu 16 km vom Nest entfernt schliefen. Jagende Männchen bevorzugten eher Graslandschaften, höhere Höhenlagen und kleinere landwirtschaftliche Flächen, vermieden jedoch Böschungen und die Nähe von Straßen zum Jagen. Wir folgern, dass die unerwartet großen Jagdgebiete der brütenden Wiesenweihen auf eine verringerte Beuteverfügbarkeit oder starke Fragmentierung der Jagdgebiete hindeuten könnten, was sowohl Vögel dazu bringt, große Jagdgebiete zu nutzen, als auch potentiell zum Populationsrückgang beisteuert.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Two main processes affecting biodiversity in the European agricultural landscape have been initiated during recent decades: agriculture intensification (Stoate et al. 2001; Tscharntke et al. 2005) and local agriculture abandonment (Wretenberg et al. 2006). The first, however, is a major threat in most of Western and Central Europe (Donald et al. 2001; Benton et al. 2003). In many regions, more intensive agricultural management of vast areas through increased frequency of mowing and harvesting and increased pesticide use (Stanton et al. 2018) led to a reduction in food availability for farmland birds, e.g. insects and weed seeds (Boatman et al. 2004; Rey 2011), and contributed to nest losses and increased chick mortality (Humbert et al. 2009; Tews et al. 2013). Among the birds affected by these large-scale processes, birds of prey and owls, as top predators in agricultural ecosystems, seem to be doubly disadvantaged: first by land-use changes decreasing the availability of suitable foraging and breeding habitats (Sanchez-Zapata et al. 2003), and second, through reducing densities of prey, i.e. other birds and/or small mammals and insects. Indeed, abundance and diversity of raptors were shown to be negatively influenced by agricultural intensification (Carrete et al. 2009). In several European countries, diurnal and nocturnal raptors typical of agricultural areas have declined due to farmland transformation during recent decades: Barn Owl Tyto alba (Martinez and Zubergoitia 2004), Little Owl Athene noctua (Šálek and Schröpfer 2008), Lesser Kestrel Falco naumanni (Donazar et al. 1993), Common Kestrel Falco tinnunculus and Common Buzzard Buteo buteo (Butet et al. 2010).
To halt these negative trends, it is crucial to identify habitats and landscape structures important for declining birds as breeding and foraging sites, as well as to understand the association between space use by farmland birds and agriculture intensification. Numerous studies have addressed these issues in Western Europe, where agriculture alterations followed by decline in farmland bird populations started first. In contrary, in Eastern Europe, agriculture transformations started relatively recently—after the fall of communism in 1989 and later, to a larger extent, following the extension of the European Union in 2004 and implementation of the EU’s Common Agricultural Policy (Reif and Vermouzek 2019). In this part of Europe, the specific agricultural landscape structure, history and management create a variety of challenges in conservation of farmland birds as compared to the West (Tryjanowski et al. 2011; Sutcliffe et al. 2015), but also much less attention has been paid to mechanisms driving the decline of farmland biodiversity.
In this study, we aimed to investigate space use of the most rapidly declining bird of prey in Poland—Montagu’s Harrier Circus pygargus (Chodkiewicz et al. 2019). The Polish population of this species is estimated at around 2800 breeding pairs (Kuczyński et al. 2020) and constitutes one-fifth of its overall EU population (Królikowska et al. 2018). Distribution of the species in Poland is not uniform, but rather linked to extensive farmland management in the eastern part of the country. Here, Montagu’s Harriers reach a density of a few times higher than in western Poland (Krupiński et al. 2012) and exhibit a relatively higher diversity of vertebrates and insects in the diet (Mirski et al. 2016) comparing to populations of similar latitude in Western Europe (Terrabue and Arroyo 2011). Unfortunately, the changes in agricultural management have been visible here as well and a decline in habitat quality in this stronghold of the Montagu's Harrier population can be expected. Given that raptors adjust space use and habitat selection in response to habitat quality reflected by, e.g. prey availability (Newton 1979; Village 1982; Santangeli et al. 2012), ranging behaviour and habitat preferences of Montagu's Harriers can be expected to markedly improve our understanding of species ecology and suggest effective conservation measures. Here, we present an eight-year telemetry study on 50 individuals aiming to describe space use of this declining species in the conditions of traditional extensive farmland and to reveal the factors affecting habitat choice in foraging. Specifically, we estimated home range size, measured daily range behaviour and identified foraging habitat selection. In addition, we observed as to what extent males shared their home ranges and if they used the same areas in different years. Finally, we also described daily and seasonal rhythms of space use to identify the time window of elevated activity and space use in the Montagu’s Harriers breeding in the patchy agricultural landscape of Eastern Poland.
Methods
Study area
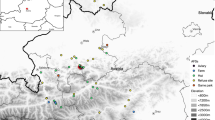
The study was carried out in Eastern Poland (Fig. 1; 52°10′N, 22°45′E), in the area of lowlands dominated by agriculture (70%) and rather low share of forests (< 20%). The most frequent land use was arable crops, most often winter crops (mainly triticale). Grasslands comprised around 20% of the area and were located mostly in the valleys of the Bug and Liwiec rivers as well as in terrain depressions. Soils of moderate and low fertility predominated. Agriculture in this region is still of extensive character and land use is highly mosaic as the average farm size was only 10 ha (ARMiR 2018) and median land-use patch size was only 1.6 ha (own data; Fig. 1c), while human population density was below 50 ind./km2. The average density of Montagu’s Harriers was relatively high and reached 6–8 pairs/100 km2 in 2013–2014 (Kuczyński and Krupiński 2014).

Location of the study area (a), home range extent of GPS-tracked Montagu's Harriers (b) and sample agriculture landscape pattern in the study area (c); contours show 90% kernel home ranges, dots mark the nest location
Montagu’s Harrier telemetry
In 2011–2018, we conducted a GPS telemetry study on 50 individuals (11 females and 39 males) followed with five different types of GPS loggers manufactured by Ecotone and Milsar (Online Resource 1, 2). The Montagu’s Harriers were caught in the breeding season between the end of May and mid-July. For this purpose, we used a stuffed Marsh Harrier Circus aeruginosus or Common Buzzard to provoke an attack of chick-guarding adults into the mistnet behind the decoy. Telemetry devices were mounted on the bird’s back using a Teflon harness. The weight of the loggers was 14 and 17 g for males and females, respectively, in 2011–2015 (Ecotone loggers) and 10 and 12 g for both sexes in 2016–2018 (Milsar loggers). Standard interval of GPS data gathering was set to 5 min, except for 2017, when loggers collected data at 5-min intervals during daytime (04:00–20:59 UTC, 06:00–22:59 local time), while at 60-min intervals at night time (21:00–03:59 UTC, 23:00–5:59, local time). Data were downloaded through radio-frequency (UHF) with the aid of directional antennae. In this study, only data from the breeding season were used: from day of capture, or arrival at breeding grounds to departure to winter quarters.
Home range estimation
Home ranges of Montagu’s Harriers were estimated using a minimum convex polygon (MCP, Mohr 1947), a kernel density estimator (KDE, Worton 1989), a Brownian bridge movement model (BBMM, Horne et al. 2007) and an auto-correlated kernel density estimator (AKDE, Fleming et al. 2015) in R (R Core Team 2018) using the packages: adehabitatHR, adehabitatLT (Calenge 2006) and ctmm (Calabrese et al. 2016). Moreover, we used: sp, GISTools and rgdal packages (Pebesma and Bivand 2005; Bivand et al. 2013, 2019; Brunsdon and Chen 2014) for the spatial data processing.
The minimum convex polygon is a straightforward and the most widely employed nonparametric estimator, which facilitates comparisons between different studies. We calculated the 100% MCP (hereafter MCP100) encompassing all data points gathered for a given individual. To remove outliers and identify areas of more intense use within home ranges, we also estimated the 90% MCP (hereafter MCP90), which excluded 10% of the outermost points from the computation. The kernel density estimator was calculated with a bivariate normal kernel function and ad hoc method for the estimation of the smoothing parameter. To apply the Brownian bridge movement model in the adehabitatHR package, we estimated the movement variance parameter using the liker function in R (following the maximum likelihood method described by Horne et al. (2007)) and set the location uncertainty to 20 m. To compute the auto-correlated kernel density estimator, we first set initial ‘guesses’ of model parameters based on visual inspection of semi-variograms in the ctmm package. Then, various movement models available in this package were fitted to each individual*season separately. The best model was selected according to Akaike’s Information Criterion and used for estimation. Home ranges calculated using kernel techniques were based on the 90th percentile for overall home range size (hereafter KDE90, BBMM90 and AKDE90, respectively) and 50th percentile for the core area (KDE50; Börger et al. 2006). We used linear models to check if the length of the tracking period and the number of GPS fixes acquired had an influence on those home range estimators (logarithm).
Daily home range sizes were also computed based on the minimum convex polygon using 90% of all telemetry records from a given day (hereafter MCP90daily). These estimations were used in ranging behaviour analyses.
To assist further understanding on how harriers overlap in their space use, we intersected home ranges of, (a) neighbouring males (i.e. belonging to the same colony or closer nests < 2 km), (b) male and female from the same pair, (c) same individual in different seasons. Home range overlap based on KDE90 was calculated in QGIS 3.4 using a local projection (EPSG: 2180). Finally, to see if home range shape differed between males and females, we calculated the perimeter-to-area ratio of each home range and compared males and females using a Mann–Whitney U test in R.
Ranging behaviour
We analysed variation in three characteristics of harrier ranging behaviour: distance travelled per day (cumulative distance among all telemetry records from a given day), daily territory size (MCP90daily) and distance to nest (separately for each telemetry record). These three characteristics were response variables in three generalised additive models (GAM1, 2, 3, respectively) with gamma family and logarithmic link, implemented in mgcv library (Wood 2017) in R. In GAM1, we considered four explanatory variables: sex, breeding success (yes vs no), day of the year (fitted with spline separately for each sex) and number of telemetry records (to control the effect of amount of data available for a given day; fitted with spline). In GAM2, we modelled MCP90daily values as a function of sex, breeding success, day of the year and number of telemetry records. In GAM3, we modelled distance to the nest as a function of day of the year, hour of the day (both fitted with interaction of splines), sex and breeding success. In all three GAMs, we included a random year effect and random individual effect. In GAM 1 and 2, we excluded days with less than 150 and more than 500 GPS positions available. We present the full models as final results.
Habitat selection
In the habitat selection analyses, data from females were excluded, as they are bonded to nests and their movement is very limited, thus reflecting mainly nest site preference rather than foraging site selection.
All remaining GPS fixes for males were resampled at an interval of maximum 1 fix per hour and restricted to summer daytime (between 6.00 and 22.00 local time). This kept the nearest distance among consecutive points over 804 m, and there was only a 9.6% chance that an individual was found still in the same patch after 1 h. This allowed us to assume resampled fixes to be independent. Altogether, 47,925 fixes were used in the analysis as “used” resources, and the same number of points was randomly drawn in a merged layer of all individual MCP100 home ranges as “available” resources (Boyce and McDonald 1999). Forests were clipped from the MCP100 prior to drawing random points as this species commonly avoids such habitats (Clarke 1996). All the geographical analyses were conducted in QGIS 3.4.
We considered eight environmental variables potentially explaining space use by Montagu’s Harrier. Elevation and slope were derived from the European Digital Elevation Model (EU-DEM), version 1.1, 25 m resolution. Land covers, such as grasslands, water, wetlands, infrastructure (imperviousness raster) and forests, were downloaded with 20 m resolution from the European Environment Agency (Copernicus.eu website). Next, forests were clipped from the study area; therefore, the remaining, open area was considered to be arable lands, which were the main habitat at all the sites and were found to be the intercept of constructed models. Land use patch size and patch shape complexity (calculated as perimeter-to-area ratio; McGarigal 2015) were calculated using 20 m resolution raster upon vector database of Land-parcel Identification System of the Agency for Restructuring and Modernization of Agriculture. Distance to water, infrastructure and roads (in metres) were calculated with 20 m resolution using the “proximity” tool in QGIS 3.4. and a binary raster of, respectively, water, imperviousness (downloaded from Copernicus Land Monitoring Service website) and one derived from vector layer of asphalt and paved roads. The eight environmental variables considered were tested in a correlation test to avoid multicollinearity in the models (|r|> 0.7; Hosmer and Lemeshow 2000). No strong correlation was identified between predictors.
We assessed harrier habitat selection using a resource selection approach (Boyce et al. 2002). Thus, we fitted mixed-effect logistic regressions (GLMM) with used (1) and available (0) points as the dependent variable, the predictor variables, and individual*year as the random effect (Gillies et al. 2006). This technique accommodates hierarchically structured data (observations within individuals), unbalanced samples, such as the data derived from telemetry, and autocorrelation among locations (Gillies et al. 2006). All the modelling procedures were built in the glmmTMB package (Brook et al. 2017). Predictors were scaled prior to analyses, and we considered six sets of these predictors for the analyses, which consisted of the null model (random effect only) and five models to test the impact of land cover, topography (elevation and slope), patch metrics (size and complexity) and individual location (distance to roads, infrastructure and water). These five models resulted from adding each of the aforementioned predictors in order and then one after another. The last model included also a quadratic relation of target species occurrence and distance to infrastructure. The latter was deduced by visual inspection of each variable histogram. To avoid overfitting, we used Akaike’s information criterion (AIC) (Burnham and Anderson 2002) to select the most parsimonious model.
Results
We tracked 50 Montagu’s Harriers from 2011 to 2018 and collected an average of 10,159 GPS fixes per individual (Online Resource 1, 2). Altogether data of 59 individual breeding seasons were collected. Most individuals were tracked for one (n = 41), less for two seasons (n = 9). On average, each individual was tracked for 40 days, and a whole breeding season lasted for 92 days, on average.
Home range estimation
Home range estimation methods were not affected by the tracking duration, nor the number of GPS fixes, for both males and females, except for BBMM method which was slightly impacted by the number of acquired locations, especially in males (Online Resource 3). The mean MCP90 area of male Montagu’s Harriers was ca. 90 km2 and only 7 km2 for females. The areas estimated using a KDE90 were 67.3 (SD: ± 42.3) km2 and 4.9 (SD: ± 6.1) km2 for males and females, respectively. The KDE50 depicting the core of the home range using the kernel method was 13 km2 in males and only 0.7 km2 in females. Brownian bridge movement models suggest home ranges of males to be slightly below 50 km2 and 10 km2 for females. Auto-correlated kernels suggest slightly larger home ranges, in case of males being 75 km2 on average and some even exceeding 100 km2, whereas much smaller for females (Fig. 2). All five methods used suggest no big differences between home ranges of males with and without breeding success.

Home range of fifty GPS-tracked Montagu’s Harriers females and males (with and without breeding success) from Eastern Poland in 2011–2018 estimated with different methods (see “Methods” for details). Circles denote single individuals in a given year, violins represent kernel distribution, paler horizontal belts show highest density interval, thick horizontal lines show means
The overlap between home ranges of neighbouring males ranged 10–86% (37% on average; n = 14). In one of the colonies, we found that five of the tracked males shared their home range space (Fig. 3). In this case, males had minimum 24% and maximum 90% of their home range used solitarily. Home range overlap and distance between nests were not significantly related (r = − 0.09, p = 0.7). Female home ranges overlapped with those of their males by 93% and 96% in two of the cases studied. Comparison of home range shape (perimeter-to-area ratio) showed female home ranges had a more compacted shape than those of males (U = 521, z = − 4.06, p < 0.001). Overlap between home ranges during the consecutive seasons was common in most males (n = 9) and ranged 44–76% (61% on average) in relation to the home range observed in the previous breeding season.

Overlapping home ranges of five Montagu’s Harrier males breeding in the same colony in the same year. Nest locations and home ranges estimated with 90% kernel density of different males are shown
Ranging behaviour
The distance travelled per day by Montagu’s Harriers ranged from 1.59 km to 226.2 km, but was much larger for males (mean: 94.5, SD: ± 37.3) than for females (mean: 45.3, SD: ± 27.6) (Fig. 4). Daily home ranges ranged between 0.2 ha and 446.8 km2 (3.1 ± 5.2 km2 for females, and 32.3 ± 30.2 km2 for males). The linear distance between bird locations and the nest reached up to 35.0 km in general and up to 26 km at the chick feeding stage. On average, this distance was 3.5 km (0.7 km for females and 3.7 km for males, SD: 0.9 and 3.6, respectively).

Daily distance travelled (upper panel) and home range size (lower panel) in male and female Montagu’s Harrier, as predicted by models GAM1 and GAM2, summarised in Table 1
Males exhibited larger daily home ranges and travelled longer distances than females (Table 1). Also birds with breeding success travelled significantly longer daily distances but had smaller daily territory size, as well as substantially shorter average distance to nest. Males showed pronounced dynamic movement patterns in relation to the time of the day and time of the year, while females were more bonded to nest vicinity (Fig. 5). Once the nest locations were chosen, males stayed close to them at the time of mating, nest building and incubation (10th May–19th June, i.e. day of year 130–170 in Fig. 5). Later in the season, they moved further away for a few weeks and then got closer again at the end of the breeding season. The distance from the nest during the day shows the rhythm of roosting behaviour. Males roosted close to nests at the beginning of the season and used remote roost sites later on. Generally, night roosts were located up to 16 km from the nest, but this distance varied greatly across the breeding season and between the sexes (Fig. 5).

Distance to nest (in kilometres, marked with isolines) for male and female Montagu’s Harrier in relation to day of the year and time of the day, as predicted by GAM3, summarised in Table 1. Note that range of x-axes is different as females were captured from end of June
Habitat selection analyses
The multi-model inference revealed that the most plausible model (i.e. lowest AIC) explaining foraging habitat selection by Montagu’s Harrier males was the one containing all the considered predictors (Table 2). Regarding land cover, Montagu’s Harriers were significantly positively associated to grasslands (β = 0.081), and avoided wetlands (β = − 1.464), water (waterbodies and rivers, β = − 2.180) and infrastructure (β = − 2.458). Concerning topography, harriers selected elevated (β = 0.814) and flat areas (β = − 0.500). Harriers also significantly selected areas distant from roads (β = 0.263), but closer to water courses (β = − 0.097) (Table 3, Online Resource 4). They avoided foraging in direct proximity of infrastructure, but also sites remote from it (β = − 0.211) (Online Resource 4G). The characteristics of landscape patches had a significant effect on the patch selection by harriers: they preferred smaller (β = − 0.004) and simple-shaped patches (β = – 0.149). Only 11% of deviance in habitat selection was explained by differences in individual’s behaviour (Table 3).
Discussion
Our research assessed, for the first time, the home range size and habitat selection of Montagu’s Harriers in environments of a traditional farming landscape in Eastern Europe. We found clear seasonal and within-day patterns of activity with substantial differences between the sexes. However, contrary to some of our expectations, home ranges of harriers in these farming landscapes in Poland were relatively large. This pattern indicated that the species needs to utilise large areas to ensure food supplies for their offspring. Further possible explanations and interpretations are included below.
Home range size
Females exhibited relatively limited home ranges, but this was expected due to the different role they play in brood rearing (Arroyo et al. 2004; Clarke 1996). However, it was shown that males used relatively extensive home ranges, but not exclusively. The overlap with space used by other males in the same colony reached 40%, on average.
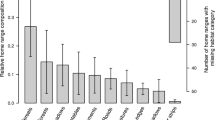
Several studies from Western Europe reported substantially smaller home ranges compared to our findings from Eastern Poland. In a radio-telemetry study in the Netherlands, Montagu’s Harriers exhibited a home range size of 35 km2 (90% kernel, Trierweiler 2010), while the figure in France was about 14 km2 (Salomolard 1997). Radio-tagged harriers in Germany showed even smaller home ranges: 11.5 km2 in males and 6 km2 in females (95% kernel, Grajetzky and Nehls 2017). In contrast, the low-frequency radio study from Spain showed that male home ranges reached 104 km2 (90% kernel, Guixé and Arroyo 2011). In a different approach to home range estimation, Klaassen et al. (2019) counted the number of 250 × 250 m grid cells used by GPS-tracked Montagu’s Harrier males in the Netherlands. Based on the number of grids used, it can be calculated that tracked individuals used ca. 15–88 km2. This estimation is closer to ours (Fig. 2).
Given the general richness of farmland biodiversity in Eastern Europe (Tryjanowski et al. 2011; Sutcliffe et al. 2015), we expected the home ranges to be relatively small in this region. Surprisingly, we recorded the opposite pattern and we consider a few potential explanations to this phenomenon. First, despite the above-mentioned studies used home range estimation methods similar to those used by us, the figures are difficult to compare with our data because of the substantial differences in location registration frequency. Home range estimations based on low-frequency data could be substantially underestimated because radio signal may be lost when birds are foraging as far as 20–30 km from the core of its home range. Also, with lower intervals, the probability of registering the individual at edges is lower than travelling through the core of its range. Finally, in the case of the kernel methods, the differences in parameters chosen in different studies make the numbers difficult to compare directly. Second, the larger home ranges in our study area may have resulted from the high level of land-use fragmentation in Eastern Poland. Consequently, to visit habitat patches preferred for foraging, e.g. fallow land, birds have to cover longer distances due to spatial spread of this habitat. In line with this, home range size of Montagu’s Harriers in the Netherlands was reversely correlated with area of fallows in their home ranges (Trierweiler 2010; Klaassen et al. 2019), a habitat abundant in voles and preferred for foraging. Finally, large home ranges in Eastern Poland may mirror general farmland alterations that are negative from the harriers’ perspective: increase of fertilizers use, increase in the area of maize, but decrease of fallow land (Online Resource 5). On the contrary, the smaller home ranges in the Netherlands were accompanied by a population increase due to implementation of agri-environmental schemes increasing vole densities and thus benefiting harriers (Koks et al. 2007). Our study was located in a region characterised by poor soils where vole densities are low (Caboń-Raczyńska and Ruprecht 1977), although no current estimations on their numbers are available. Harriers in Eastern Poland may be, therefore, relying more on alternative prey (small birds, reptiles and insects), which are decreasing in numbers due to agriculture intensification.
Ranging behaviour
We showed that space use in Montagu’s Harriers is not uniform over time—both foraging and roosting distances changed over the breeding season. Males tend to spend nights closer to their nests at the beginning of the season, while later on chose more distant sites for roosting (Fig. 5).
Males were foraging even up to 26 km from their nests at the stage of chick-rearing and up to 35 km across the whole season. In Germany, the mean maximum distance from the nest reached 6 ± 3.8 km, but was estimated using radio-telemetry (Grajetzky and Nehls 2017). In Spain, males were found, on average, 5.5 km from nests, but most individuals exceeded a 10 km distance from time to time, and reached up to 21 km from nests (Guixé and Arroyo 2011). The daily distances travelled by Montagu’s Harriers in our study equals 85 km, on average. According to Schlaich et al. (2017), data gathered at 5-min intervals registered only 40% of actual movement length. Therefore, the real distance travelled daily by Polish harriers can exceed 200 km. This is almost the same as noted for males in the Netherlands and not much less than in autumn (296 km) and spring (252 km) migration (Schlaich et al. 2017). Thus, these distances travelled by males, most often during active flight, should probably be considered a substantial effort related with food provisioning to nests, as harriers studied by us with breeding success travelled more than those with brood losses.
Habitat selection in foraging
GPS telemetry seems to be the best way to investigate foraging habitat selection, assuming that a great deal of movement (excluding night) is for foraging. This might be especially true for the Montagu’s Harrier because it shows very limited territoriality (manifested as significant overlap in home ranges of neighbouring males), so it rarely engages in behaviour, such as display flights or territory defence, once the actual breeding starts and especially during the busy, chick-rearing season. We showed that males avoided wetlands and water while tended to forage in relatively flat and elevated areas, far from roads, but closer to watercourses. We found them also foraging closer to human settlements, which may be a proxy for agricultural landscape, but on the other hand, they avoided flying over infrastructure and its close proximity. Surprisingly, Montagu’s Harriers avoided patches of more complex shape which might be linked with avoidance of wet areas: parcels with more complex shapes are often associated with waterbodies, rivers and infield woods. In addition, we found a preference for grasslands and smaller patches, which was, however, of marginal importance.
Studies that accounted for detailed land cover showed that Montagu’s Harriers in Schleswig–Holstein (Germany) preferred less-transformed vegetation, such as hay meadows, extensive pastures and salt marshes, but avoided crops and intensive pastures (Grajetzky and Nehls 2017). In the Netherlands, harriers used alfalfa, fallow and grasslands most often when hunting (while home range analysis showed crops, instead of grasslands, were more important; Trierweiler 2010). Harriers tracked in Spain, indicated alfalfa as most important foraging habitat in two studied regions, and also shrubland and fallow in one of them (Guixé and Arroyo 2011). Also, the harvesting effect itself strongly attracts harriers (Schlaich et al. 2015), which should be considered when interpreting results of habitat preferences based on telemetry. For example, Trieweiler (2010) found a preference for cereals during the fledglings’ phase, which is probably linked to crop harvest time.
In summary, Montagu’s Harriers in Europe were shown to benefit from high prey availability, but also were found to prefer habitats with high prey abundance, such as fallows, extensive grasslands and natural vegetation. In Poland, Montagu’s Harriers avoided wetlands and lower elevation, which is partly confirmed by the recent withdrawal of this species from Special Protection Areas dominated by natural wet grasslands (Krupiński 2014). As a consequence, the agricultural landscape is currently the most important habitat for this species in Poland and, thus, further agriculture intensification is very likely to negatively affect the foraging conditions and breeding success of harriers. We believe our data could serve as a reference for future studies on space use by harriers and to design conservation measures for the species, as we expect to observe enlargement of their home ranges in response to further agriculture intensification.
Data availability
Movement data used in this study is available at https://dx.doi.org/10.17632/hk3837k7kv.1.
References
ARMiR (2018) https://www.arimr.gov.pl/pomoc-krajowa/srednia-powierzchnia-gospodarstwa.html. Accessed 4 Feb 2019
Arroyo BE, García JT, Bretagnolle V (2004) Montagu’s Harrier Circus pygargus. Birds Western Palaearctic Update 6:41–55
Benton TG, Vickery JA, Wilson JD (2003) Farmland biodiversity: is habitat heterogeneity the key? Trends Ecol Evol 18:182–188
Bivand R, Pebesma, Gomez-Rubio V (2013) Applied spatial data analysis with R, 2nd edn. Springer, NY. https://www.asdar-book.org/. Accessed 6 Mar 2020
Bivand R, Keitt T, Rowlingson B (2019) rgdal: Bindings for the 'Geospatial' Data Abstraction Library. R package version 1.4–3. https://CRAN.R-project.org/package=rgdal. Accessed 10 Feb 2020
Boatman ND, Brickle NW, Hart JD, Milsom TP, Morris AJ, Murray AWA, Murray KA, Robertson PA (2004) Evidence for the indirect effects of pesticides on farmland birds. Ibis 146:131–143. https://doi.org/10.1111/j.1474-919X.2004.00347.x
Börger L, Franconi N, De Michele G, Gantz A, Meschi F, Manica A et al (2006) Effects of sampling regime on the mean and variance of home range size estimates. J Anim Ecol 75:1393–1405. https://doi.org/10.1111/j.1365-2656.2006.01164.x
Boyce MS, McDonald LL (1999) Relating populations to habitats using resource selection functions. Trend Ecol Evol 14:268–272
Boyce MS, Vernier PR, Nielsen SE, Schmiegelow FKA (2002) Evaluating resource selection functions. Ecol Model 157:281–300
Brooks ME, Kristensen K, van Benthem KJ, Magnusson A, Berg CW, Nielsen A, Skaug HJ, Maechler M, Bolker BM (2017) glmmTMB balances speed and flexibility among packages for zero-inflated generalized linear mixed modelling. R J 9:378–400
Brunsdon C, Chen H (2014) GISTools: Some further GIS capabilities for R. R package version 0.7–4. https://CRAN.R-project.org/package=GISTools. Accessed 10 Feb 2010
Burnham KP, Anderson DR (2002) Model selection and multimodel inference, 2nd edn. Springer, New York
Butet A, Michel N, Rantier Y, Comor V, Hubert-Moy L, Nabucet J, Delettre Y (2010) Responses of common buzzard (Buteo buteo) and Eurasian kestrel (Falco tinnunculus) to land use changes in agricultural landscapes of Western France. Agri Ecos Env. https://doi.org/10.1016/j.agee.2010.04.011
Caboń-Raczyńska K, Ruprecht AL (1977) Estimation of population density of the common vole in Poland: an analysis of owl pellets. Acta Theriol 22(25):349–354
Calabrese JM, Fleming CH, Gurarie E (2016) ctmm: an r package for analyzing animal relocation data as a continuous-time stochastic process. Methods Ecol Evol 7:1124–1132. https://doi.org/10.1111/2041-210X12559
Calenge C (2006) The package adehabitat for the R software: a tool for the analysis of space and habitat use by animals. Ecol Model 197:516–519
Carrete M, Tella J, Blanco G, Bertellotti M (2009) Effects of habitat degradation on the abundance, richness and diversity of raptors across Neotropical biomes. Biol Conserv 142:2002–2011. https://doi.org/10.1016/j.biocon.2009.02.012
Chodkiewicz T, Chylarecki P, Sikora A, Wardecki Ł, Bobrek R, Neubauer G, Marchowski D, Dmoch A, Kuczyński L (2019) Raport z wdrażania art. 12 Dyrektywy Ptasiej w Polsce w latach 2013–2018: stan, zmiany, zagrożenia. Biul Monit Przyr 20:1–80
Clarke R (1996) Montagu’s harrier. Arlequin Press, Chelmsford
Donald RF, Green RE, Heath MF (2001) Agricultural intensification and the collapse of Europe’s farmland bird populations. Proc R Soc Lond B 268:25–29
Donazar J, Negro J, Hiraldo F, Hiraldo F (1993) Foraging habitat selection, land-use changes and population decline in the lesser kestrel Falco naumanni. J Appl Ecol 30:515–522. https://doi.org/10.2307/2404191
Fleming CH, Fagan WF, Mueller T, Olson KA, Leimgruber P, Calabrese JM (2015) Rigorous home range estimation with movement data: a new autocorrelated kernel density estimator. Ecology 96:1182–1188
Gillies CS, Hebblewhite M, Nielsen SE, Krawchuck MA, Aldridge CL, Frair JL, Saher DJ, Stevens CE, Jerde CL (2006) Application of random effects to the study of resource selection by animals. J Anim Ecol 75:887–889
Grajetzky B, Nehls G (2017) Telemetric Monitoring of Montagu’s Harrier in Schleswig-Holstein. In: Hötker H, Krone O, Nehls G (eds) Birds of Prey and Wind Farms. Springer, Cham. https://doi.org/10.1007/978-3-319-53402-2_4
Guixé D, Arroyo B (2011) Appropriateness of special protection areas for wide-ranging species: the importance of scale and protecting foraging, not just nesting habitats. Animal Conserv 14:391–399. https://doi.org/10.1111/j.1469-1795.2011.00441.x
Horne JS, Garton EO, Krone SM, Lewis JS (2007) Analyzing animal movements using Brownian bridges. Ecology 88:2354–2363
Hosmer DW, Lemeshow S (2000) Applied logistic regressions. Wiley, New York
Humbert JY, Ghazoul J, Walter T (2009) Meadow harvesting techniques and their impacts on field fauna. Agric Ecosys Environ 130:1–8. https://doi.org/10.1016/j.agee.2008.11.014
Klaassen RHG, Schlaich AE, Both C, Bouten W, Koks BJ. 2019 Individual variation in home range size reflects different space use strategies in a central place foraging raptor bird In: Schlaich A (PhD thesis) Migrants in double jeopardy - Ecology of Montagu's Harriers on breeding and wintering grounds. 10.33612/diss.97354411.
Koks BJ, Trierweiler CT, Visser EG, Dijkstra C, Komdeur J (2007) Do voles make 30 agricultural habitat attractive to Montagu´s harrier Circus pygargus? Ibis 149:575–586
Królikowska N, Krupiński D, Kuczyński L (2018) Combining data from multiple sources to design a raptor census: the first national survey of the Montagu’s Harrier Circus pygargus in Poland. Bird Conserv Int 28:350–362. https://doi.org/10.1017/S0959270917000235
Krupiński D (2014) Inwentaryzacja błotniaka łąkowego w ostojach Natura 2000 w latach 2013–2014. Raport końcowy. Towarzystwo Przyrodnicze “Bocian,” Warszawa
Krupiński D, Lewtak J, Rzępała M, Szulak K (2012) Breeding biology of the Montagu’s Harrier (Circus pygargus) in east-central Poland and implications for its conservation. Zool Ecol. https://doi.org/10.1080/21658005.2012.699744
Kuczyński L, Krupiński D (2014) Krajowy Cenzus Błotniaka Łąkowego. Raport końcowy. Towarzystwo Przyrodnicze “Bocian,” Poznań-Warszawa
Kuczyński L, Wierzbicka A, Krupiński D (2020) Krajowy cenzus błotniaka łąkowego w latach 2018–2019 Raport końcowy. Towarzystwo Przyrodnicze Bocian, Poznań-Warszawa
Martínez J, Zuberogoitia I (2004) Habitat preferences and causes of population decline for Barn Owls Tyto alba: A multi-scale approach. Ardeola revistaibérica de ornitología 51:303–317
McGarigal K (2015) FRAGSTATS Help. https://www.umass.edu/landeco/research/fragstats/documents/fragstats.help.4.2.pdf. Accessed 6 Mar 2020
Mirski P, Krupiński D, Szulak K, Żmihorski M (2016) Seasonal and spatial variation of the Montagu’s Harrier’s Circus pygargus diet in Eastern Poland. Bird Study 63:165–171. https://doi.org/10.1080/00063657.2016.1143914
Mohr CO (1947) Table of equivalent populations of North American small mammals. Am Mid Nat 37:223–249
Newton I (1979) Population ecology of raptors. Poyser, Berkhamsted
Pebesma EJ, Bivand RS (2005) Classes and methods for spatial data in R. R News 5:9–13. https://CRAN.R-project.org/doc/Rnews/. Accessed 15 Jan 2020
R Core Team (2018) R: A language and environment for statistical computing. R Foundation for Statistical Computing, Vienna, Austria. URL https://www.R-project.org/.
Reif J, Vermouzek Z (2019) Collapse of farmland bird populations in an Eastern European country following its EU accession. Conserv Lett 12:e12585. https://doi.org/10.1111/conl.12585
Rey PJ (2011) Preserving frugivorous birds in agro-ecosystems: lessons from Spanish olive orchards. J App Ecol 48:228–237. https://doi.org/10.1111/j.1365-2664.2010.01902.x
Salamolard M (1997) Utilisation de l’espace par le Busardcendré Circus pygargus. Superficie et distribution des zones de chasse. Alauda 65:307–320
Šálek M, Schröpfer L (2008) Population decline of the Little Owl (Athene noctua) in the Czech Republic. Pol J Ecol 56:527–234
Sanchez-Zapata JA, Carrete M, Gravilov A, Sklyarenko S, Ceballos O, Donazar JA, Hiraldo F (2003) Land use changes and raptor conservation in steppe habitats of Eastern Kazakhstan. Biol Conserv 111:71–77
Santangeli A, Hakkarainen H, Laaksonen T, Korpimäki E (2012) Home range size is determined by habitat composition but feeding rate by food availability in male Tengmalm’s Owls. Anim Beh 83:1115–1123. https://doi.org/10.1016/j.anbehav.2012.02.002
Schlaich A, Klaassen RHG, Bouten W, Both C, Koks BJ (2015) Testing a novel agri-environment scheme based on the ecology of the target species Montagu’s Harrier Circus pygargus. Ibis. https://doi.org/10.1111/ibi.12299
Schlaich AE, Bouten W, Bretagnolle V, Heldbjerg H, Klaassen RHG, Sørensen IH, Villers A, Both C (2017) A circannual perspective on daily and total flight distances in a long-distance migratory raptor, the Montagu’s harrier Circus pygargus. Biol Lett 13:20170073. https://doi.org/10.1098/rsbl.2017.0073
Stanton RL, Morrissey CA, Clark RG (2018) Analysis of trends and agricultural drivers of farmland bird declines in North America: a review. Agric Ecosyst Environ 254:244–254
Stoate C, Boatman ND, Borralho RJ, Rio Carvalho C, de Snoo GR, Eden P (2001) Ecological impacts of arable intensification in Europe. J Environ Manag 63:337–365
Sutcliffe LME, Batáry P, Kormann U, Báldi A, Dicks LV, Herzon I, Tscharntke T (2015) Harnessing the biodiversity value of Central and Eastern European farmland. Divers Distrib 21:722–730
Terraube J, Arroyo B (2011) Factors influencing diet variation in a generalist predator across its range distribution. Biodivers Conserv 20:2111–2131
Tews J, Bert DG, Mineau P (2013) Estimated mortality of selected migratory bird species from mowing and other mechanical operations in Canadian agriculture. Avian Conserv Ecol 8(2):8. https://doi.org/10.5751/ACE-00559-080208
Trierweiler C (2010) Travels to feed and food to breed. The annual cycle of a migratory raptor, Montagu’s Harrier, in a modern world. Dissertation, University of Groningen
Tryjanowski P, Hartel T, Báldi A, Szymański P, Tobółka M, Herzon I, Goławski A, Konvička M, Hromada M, Jerzak L, Kujawa K, Lenda M, Orłowski M, Panek M, Skórka P, Sparks TH, Tworek S, Wuczyński A, Żmihorski M (2011) Conservation of farmland birds faces different challenges in Western and Central-Eastern Europe. Acta Ornithol 46:1–12. https://doi.org/10.3161/000164511X589857
Tscharntke T, Klein AM, Kruess A, Steffan-Dewenter I, Thies C (2005) Landscape perspectives on agricultural intensification and biodiversity–ecosystem service management. Ecol Lett 8:857–874
Village A (1982) The home range and density of kestrels in relation to vole abundance. J Anim Ecol 51:413–428
Wickham H, François R, Henry L, Müller K (2018) dplyr: A Grammar of Data Manipulation. R package version 0.7.6. https://CRAN.R-project.org/package=dplyr. Accessed 16 Oct 2019
Wood SN (2017) Generalized additive models: an introduction with R, 2nd edn. Chapman and Hall/CRC, Boca Raton
Worton B (1989) Kernel methods for estimating the utilization distribution in home-range studies. Ecology 70:164–168
Wretenberg J, Lindström Å, Svensson S, Thierfelder T, Pärt T (2006) Population trends of farmland birds in Sweden and England: similar trends but different patterns of agricultural intensification. J Appl Ecol 43:1110–1120
Acknowledgements
We would like to thank Andrzej Łukijańczuk, Natalia Hałas, Jerzy Lewtak and Grzegorz Grygoruk for their help with the field work. We are also very grateful to Almut Schlaich for valuable comments, that greatly improved our manuscript.
Funding
The research was financed from private funds (2011–2012) and co-financed by EU Funds (project POIS.05.01.00-00-381/12 in years 2013–2015 and project POIS.02.04.00-00-018/16 in years 2017–2020). We also thank Paweł Otulak from Milsar Technologies S.R.L. (https://milsar.com) for funding 8 RadioTag-14 loggers in the year 2016.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare they have no competing interests.
Ethical approval
The study was conducted in accordance with national law. The permit to trap and tag the Montagu’s Harrier was given by the General Directorate for Environmental Protection in Poland.
Additional information
Communicated by F. Bairlein.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Krupiński, D., Kotowska, D., Recio, M.R. et al. Ranging behaviour and habitat use in Montagu’s Harrier Circus pygargus in extensive farmland of Eastern Poland. J Ornithol 162, 325–337 (2021). https://doi.org/10.1007/s10336-020-01837-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10336-020-01837-x