
Abstract
The ionosphere shows regular changes such as daily, 27 days, seasonal, semi-annual, annual, and 11 years. These changes can be modeled and their effects largely determined. However, in addition to regular changes, irregular changes occur in the ionosphere due to space weather conditions, natural disasters, and human-induced irregularities. GNSS is one of the instruments along with many others that can give a piece of information on the ionospheric state. Various indices/parameters are used to determine the effect of space weather conditions. The well-known ones are solar activity indices, geomagnetic storm indices, magnetic field components, proton density, and proton flux parameters. It is important to take all of these indices into consideration when investigating the source of the anomaly. Considering only some of them may lead to incorrect inferences about the source of possible anomalies. To carry out comprehensive research in this field, it is necessary to analyze a very large data set. This indicates the requirement for an automatic system. With the Global and Regional Ionosphere Monitoring System (GRIMS) designed within the scope of this study, the ionosphere can be monitored globally and regionally. The GRIMS is online at https://www.online-grims.com/. By using Global ionospheric maps and GNSS receiver data, global, regional, and station-specific anomalies can be detected regularly through methods such as HDI (Highest Density Interval) and ARIMA (Autoregressive Integrated Moving Average). GRIMS gathers space weather-related parameters from ionospheric data centers to help users interpret the situation, and it allows users to download the results and request data for specific days. The details of the experimental results and output products of the system designed during the geomagnetic active days of March 17, 18, 2015 are given in this paper. Moreover, geomagnetic active days that occurred between 2000 and 2023 are given in the GRIMS.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
The ionosphere is a region of the atmosphere approximately 60–1000 km above the Earth’s surface. This layer is very important in terms of the propagation of radio waves. Since free electrons are much lighter than free ions in the ionosphere, they affect the propagation of radio waves more. Therefore, the most important parameter used for the ionosphere is the Total Electron Content (TEC) value of the medium. The density of the electrons over the region is not always regular, it varies due to various irregular factors; geomagnetic/solar activities, geological natural hazards (earthquakes, volcanic eruptions, tsunamis), ionospheric irregularities (Traveling Ionospheric Disturbances), man-made events (rockets) (Spoelstra 1996; Datta-Barua et al. 2003; Alcay et al. 2014; Astafyeva 2019). In order to analyze the structure of the ionosphere, it should be monitored regularly. Various empirical models have been created as a result of studies focused on the ionosphere. The most well-known of these models are; International Reference Ionosphere (Bilitza 2001), NeQuick model (Di Giovanni and Radicella 1990), Bent model (Bent and Llewellyn 1973), Parameterized Ionospheric Model (Daniell et al. 1995), Parameterized, real-time ionospheric specification model (Daniel and Brown 1995), Thermosphere–Ionosphere General Circulation Model (Emery et al. 1996), Sheffield University Plasmasphere Ionosphere Model (Bailey et al. 1997) and Utah State University Global Assimilation of Ionospheric Measurements (Scherliess et al. 2006). However, these models are suitable for quiet ionospheric conditions. In recent years, the Global Navigation Satellite System (GNSS) has become the international standard for ionosphere studies due to its ability to monitor regular and irregular changes in the ionosphere. Using GNSS observations, the ionosphere can be monitored globally, regionally, and station-specific.
In order to monitor the ionosphere on a global scale, Global Ionosphere Maps (GIMs) with different temporal resolutions are produced by various analysis centers (Milanowska et al. 2021). The spatial resolution of these maps is mostly 2.5° in latitude and 5° in longitude. In the regional sense, various GPS-based models and methods are used. Regional TEC models can be basically divided into two categories; grid-based and function-based (Gao and Liu 2002). Details of frequently used models and methods are given in Alcay et al. (2014). Recently near real-time regional models have started to be developed. One of the most recent ones is SHAKING. It is based on the adjusted Spherical Harmonics Adding Kriging method for near real-time ionospheric modeling (Liu et al. 2022). There is also various software available developed by the scientific community for single-station TEC calculation. Some of them; GPS-TEC software (Seemala 2011), IONOLAB-TEC software (Sezen et al. 2013), and GNSS-LAB (tec-suite/TayAbsTec) (Yasyukevich et al. 2020a).
There are several existing services associated with space weather monitoring. The important characteristics of the services are provided by Vadakke Veettil et al. (2019). Besides them, The Massachusetts Institute of Technology (MIT) Haystack Observatory developed the Madrigal database system that provides 2D GNSS-based TEC maps with a resolution of 1° (lat) × 1°(long) × 5(min) using dense networks of worldwide GNSS receivers (Rideout and Coster 2006). Galkin et al. (2012, 2020) proposed the IRI Real-Time Assimilative Mapping (IRTAM) model based on data assimilation from a global ionosonde network. Dabbakuti and Ch (2019) provided an ionosphere monitoring system based on Internet of Things with ThingSpeak. Yasyukevich et al. (2020b) presented an ionosphere monitoring system called SIMuRG (System for Ionosphere Monitoring and Research from GNSS). The most recent ones are the MITIGATOR (GNSS-Based System for Remote Sensing of Ionospheric Absolute Total Electron Content) (Yasyukevich et al. 2022) and the GUARDIAN system (Martire et al. 2023). Some of these systems provide foF2, hmF2, B0, and B1, TEC, ROTI, and Scintillation maps, while others provide monitoring natural hazards or solar events such as Coronal Mass Ejection (CME) and Solar Wind and alert users.
The GRIMS (Global and Regional Ionosphere Monitoring System) is designed to provide continuous monitoring of the ionosphere, to present the variations occurring in the ionosphere globally and regionally with anomaly maps, and to provide station-based results using alternative approaches such as HDI (Highest Density Interval) and ARIMA (Autoregressive Integrated Moving Average) to enable more detailed examination of the intense anomalies. It also presents the indices and parameters graphically so that it can be examined whether the anomalies are caused by space weather conditions. When space weather conditions are the source of the anomaly, it becomes possible to observe the affected regions. Consequently, the extent to which TEC anomalies occur in response to increases in specific indices at particular levels can be analyzed. The main features of the GRIMS are as follows:
-
Observation of global/regional anomalies and station-based details as well as changes in space weather condition indices/parameters.
-
Use of rapid and then final CODE-GIMs in global monitoring depending on whether indices/parameters are published or not.
-
In addition to displaying global anomaly maps, to observe significant anomalies in detail, the use of suitable International GNSS Service (IGS) stations from regions where the anomaly is above 5 TECU (above the accuracy level of CODE-GIM (~ 2/3 TECU)) and lasts longer than 8 h (the abnormal day condition stated by Liu et al. (2009)).
-
Identification of these stations with the highest anomaly in the northern and southern hemisphere high latitude, mid-latitude, and equatorial regions.
-
Obtaining station-based Vertical TEC (VTEC) values, and thus graphical presentation of anomalies with higher accuracy using the Moving Average (MA), HDI, and ARIMA methods.
-
Presentation of daily Jason Altimeter VTEC maps together with the previous 10 days for ocean regions with high-resolution
-
The possibility to download global and regional anomaly maps and various data.
-
By using the data request part, the opportunity to request data for the desired date and having the results sent to the provided e-mail addresses.
-
Opportunity for researchers to examine GRIMS results of important geomagnetic active days and details of published articles.
The structure of this paper is arranged as follows: Details of the space weather conditions and space weather condition indices/parameters are given in the following section. The third section describes GIM TEC, Jason TEC, GPS TEC data, and analysis of TEC data for anomaly detection. The fourth section introduces system design and details for global and regional monitoring, respectively. The fifth section presents the global and regional results. The conclusions are drawn in the next section. Then future work directions of GRIMS are provided.
Space weather conditions and space weather condition indices/parameters
Many factors cause regular and irregular TEC changes in the ionosphere. The largest changes on a global scale are due to space weather conditions. Various indices/parameters are used to determine the magnitude of these conditions. In the following subsections, details regarding space weather conditions and space weather condition indices/parameters are given, respectively.
Space weather conditions
Space weather conditions, caused by the variability of the sun over periods, influence numerous facets of daily life, such as; GNSS systems, satellite communications, satellite drag, electric power transmission, HF radio communications, Earth’s climate, etc. (https://www.swpc.noaa.gov/impacts). A number of different phenomena originating from space weather conditions have many effects on the Earth’s atmosphere, particularly on the ionosphere. Details and various aspects of space weather phenomena, including their future prospects, are provided in Singh et al. (2021) and (https://www.swpc.noaa.gov/phenomena).
Space weather condition indices/parameters
To examine the magnitude of space weather conditions, several indices/parameters are used. The most used for this purpose are solar activity indices (F10.7 and Solar Extreme Ultraviolet (EUV)), Geomagnetic storm indices (kp, Dst), Magnetic field components (Bx, By, Bz), proton density, and proton flux parameters (Alcay and Gungor 2020). Indices/parameters obtained from OMNIWeb and other data centers and presented graphically in GRIMS are given in Table 1.
TEC prediction and analysis
TEC data is obtained using different data sources. In the GRIMS, GIM TEC, Jason TEC, and station-based TEC data are used. Additionally, various methods are used for TEC anomaly detection. Details of these data sources and the methods used are provided in the following subsections.
GIM TEC
There are some IGS Ionosphere Associate Analysis Centers (IAACs) around the world that produce final global ionosphere TEC maps (GIMs). The most known of them are; CODE (Center for Orbit Determination in Europe/GIM id:CODG), ESA/ESOC (European Space Agency / European Space Operations Center/GIM id: ESAG), JPL (Jet Propulsion Laboratory/GIM id:JPLG), UPC/UQR (Polytechnic University of Catalonia/GIM id:UPCG), CAS (Chinese Academy of Sciences/GIM id:CASG), NRCan (Natural Resources Canada/GIM id:EMRG), WHU/WHR (Wuhan University, China/GIM id:WHUG). Some details of these IGS IAACs, such as temporal resolutions, ionosphere modeling methods, Differential Code Bias (DCB) computation, and shell model, are provided by Roma-Dollase et al. (2018), Chen et al. (2020) and Yang et al. (2021). Chen et al. (2020) examined the global ionosphere maps in terms of accuracy and consistency and stated that the maps of the CODE data center give reliable results. For this reason, the GIM maps used in the designed system belong to the CODE data center.
Jason-3 altimeter TEC
The Altimeter missions started with TOPEX/Poseidon (TP) in 1992 and continued with Jason-1 (J1) (2002–2012), Jason-2 (J2) (2008–2017), and Jason-3 (J3) (2016-), respectively (Azpilicueta and Nava 2021). Currently, Jason-3 is the last element of this series. The Jason-3 satellite flies on the same ground track with TP, J1, and J2 10-day exact repeat cycle (https://www.ncei.noaa.gov/sites/default/files/2021-01/Jason-3%20Products%20Handbook.pdf). The orbital height of this satellite is 1336 km. Thus, J3 provides VTEC data over the ocean for 0–1336 km altitudes. It is GNSS-independent and suitable to validate the GNSS GIMs (Brack et al. 2021). In this study, J2 VTEC data were used for the comparison.
GPS TEC data
The developed system can obtain TEC data by using the GPS-TEC software developed by one of the co-authors (Seemala, (2011), (https://seemala.blogspot.com), Poudel et al (2022), Rukundo et al (2023)), and the IONOLAB-TEC software (Sezen et al. (2013), (http://www.ionolab.org/index.php?page=index&language=tr), Karatay (2020), Muhammad and Kulahci (2022)) of IONOLAB research group. GPS-TEC software needs RINEX observation files during the process and RINEX navigation files to calculate the altitude and azimuth angles of the satellites. DCB files provided by the IGS website (http://ftp.aiub.unibe.ch/CODE/) are also required for satellite errors. The program can directly use DCB files or estimate the DCB files if they are not available (https://seemala.blogspot.com). With IONOLAB-TEC, TEC data can be obtained using the RINEX observation data of the stations (Sezen et al. 2013). First, slant TEC (STEC) values are estimated for each satellite-receiver pair in each epoch using phase + code (smoothed code with phase measurements) measurements. Then, STEC values are converted to VTEC values using a mapping function (Arikan et al. 2003; Nayir et al. 2007). The VTEC values obtained at the same epoch from all available satellites at each station are obtained using the Reg-Est (Regular Estimation) algorithm to obtain the TEC value in the zenith direction of the receiver (Arikan et al. 2003, 2004; Nayir et al. 2007). GPS-TEC software and IONOLAB-TEC software provide VTEC data using similar methods. However, GPS-TEC software provides VTEC data for Ionospheric Pierce Points (IPP). Therefore, we use GPS-TEC software for regional monitoring in the GRIMS. Since IONOLAB-TEC software provides VTEC data for the zenith direction of the receiver, we use this software for significantly affected stations section of the global monitoring in the GRIMS.
Analysis of TEC data
Several methods are used for TEC anomaly detection. The well-known of these methods are;
-
Cross-Correlation Analysis (Pulinets et al. 2007),
-
Moving Average (Liu et al. 2009)
-
Wavelet Transformation (Akhoondzadeh 2012)
-
Autoregressive Integrated Moving Average (Akhoondzadeh 2013)
-
Principal Component Analysis and Nonlinear Principal Component Analysis (Lin 2013),
-
Support Vector Machine (Akhoondzadeh 2013),
-
Highest Density Interval (Hyndman 1996)
-
Kalman Filter (Akhoondzadeh 2019),
-
Neural Network (Akhoondzadeh 2019),
-
Singular Spectrum Analysis (Guo et al. 2019),
Since GRIMS uses Moving Average, Highest Density Interval, and Autoregressive Integrated Moving Average methods for anomaly detection, details of these three methods are given in the following subsections.
Moving average
The MA is a statistical method used to predict long-term trends. The method represents taking an average of a set of numbers in a given range while moving the range. In this method, Lower Quartile (LQ) and Upper Quartile (UQ) values are determined. These values obtained for the first 15 successive days are used for the 16th day (Liu et al. 2009). All data are evaluated in this way. Assuming a normal distribution with mean µ and standard deviation σ for TEC, the middle 50% of the data is 1.3489795σ (1.34σ in practice). In the MA approach, the lower bound (LB) and upper bound (UB) values are calculated using LB = M−1.5(M-LQ) and UB = M + 1.5(UQ-M). In this approach, the lower and upper bounds (LB, UB) contain 68.83352% of the data in normally distributed (Liu et al. 2009).
Highest density interval
HDI method is the generalization of the Equal-Tailed Interval (ETI) method under the Confidence Interval. Although the ETI method and the HDI method are equal to each other in symmetric and univariate distributions, the HDI method gives more reasonable results in asymmetric distributions and in cases where there are outliers.
For the HDI method, let f(x) be the density function of a random variable X. Then the 100(1-α)% HDI is the subset R(f_α) of the sample space of X such that.
where f_α is the largest constant such that.
Detailed information on HDI calculation is available in Hyndman (1996). In practice, HDI can be calculated with the hdi function included in the HDInterval package of the R program.
Autoregressive integrated moving average
Stationary is an important concept in time series. Stationarity is defined as a property of a time series in which its statistical properties, such as mean and variance, do not change over time. However, it is a common situation that the series is not stationary in practice. Analyzing, estimating, and predicting with non-stationary series leads to inconsistent and biased results. For these reasons, the most common non-stationary series in applications are made stationary using some transformation methods and then analyzed. These transformations are mandatory as probability models developed and used for time series analysis can only be applied to stationary time series. In this respect, in order to model time series, the series should be stationary, and if the series is not stationary, it should be made stationary by taking the difference of the series (Gahirwal and Vijayalakshmi 2013). Among the stationarity tests, also known as unit root tests, the most common one in the literature is Augmented Dickey Fuller (ADF) test (Said and Dickey 1984).
ARIMA (p,d,q) model includes AR (p), MA (q) and ARMA (p,q) processes (Gahirwal and Vijayalakshmi 2013), where p is the number of autoregressive terms, d is the number of non-seasonal differences, and q is the number of lagged forecast errors in the prediction equation. In the ARIMA process, first of all, the stationarity of the series is checked with the ADF test. If stationarity cannot be achieved, difference taking is applied. Then the p and q parameters are estimated. The algorithm for calculating these parameters is included in the study of Hyndman and Khandakar (2008). According to the information criteria, the best ARIMA model can be calculated with the help of the auto.arima function included in the forecast package in the R program.
The ARIMA model is expressed as in Eq. 3 (Kongcharoen and Kruangpradit 2013; Zhang 2003). Where \({y}_{t}\) is the dependent variable, \({\varepsilon }_{t}\) is the value of the error at time \(t\), \({\beta }_{i}(i=\text{1,2},\dots ,p)\) and \({\theta }_{j}(j=\text{1,2},\dots ,q)\) are model parameters,
In the ARIMA model, the values in the time series are modeled over the past values and the prediction is made. This model was first discovered by Box and Jenkins and is also known as the Box-Jenkins model. The flow chart of the model is given in Fig. 1.

Flowchart of the ARIMA model
System design and details
The GRIMS is a system including three independent modules. These are the IONOLAB-TEC software, the GPS-TEC software, and the core program. Besides, it uses various small programs for tasks such as downloading data (wget, curl) and decompressing files in hatanaka format (crx2rnx). It uses multiple threads in some operations to make the most of resources and reduce processing time. Details of GRIMS in the global and regional monitoring of the ionosphere are given in the following subsections.
Monitoring the ionosphere globally
In the designed system, global anomaly maps are presented using rapid CODE-GIMs until the indices/parameters are published from OMNIWeb. OMNIWeb data arrive at different latencies. While, magnetic field components (Bx, By, Bz) arrive with a delay of approximately 1 month, kp, dst, and F10.7 indices ~ 1 week, and proton density values ~ 10 days. Once all these data are released, the final CODE-GIMs and the indices/parameters are downloaded from the CODE data center (http://ftp.aiub.unibe.ch/CODE/) and OMNIWeb, (https://omniweb.gsfc.nasa.gov/form/dx1.html) respectively, on a daily basis. For each day, the GIM TEC values of the previous 15-day period are analyzed with the MA method, and anomaly maps showing whether there is an abnormality are obtained. If the anomaly is over 5 TECU and lasts more than 8 h, the closest IGS stations to these regions are automatically found and displayed on the map. The anomalies found from anomaly maps and the representation of IGS stations in these regions are given in Fig. 2 as an example.

An example of IGS stations falling into anomaly zones
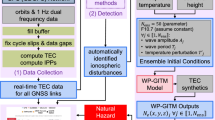
It is checked whether the RINEX observation file of the found IGS stations on the analyzed day and 15 days before is available in the Crustal Dynamics Data Information System (CDDIS). Then, the available RINEX observation files are downloaded and the data duration is determined on an epoch basis. As a result, those that are not suitable for TEC estimation in terms of data duration are removed. After this pre-processing, TEC estimation is made with a temporal resolution of 30 s using IONOLAB-TEC software. The local TEC anomalies are analyzed in the obtained VTEC values. In addition to the MA method, HDI and ARIMA approaches can also be used to investigate anomalies. A subprogram has been developed in R statistical coding language for ARIMA and HDI methods. The anomaly levels determined by the preferred method from the MA/HDI/ARIMA approaches for each station are shown on the graph. In order to perform these operations automatically, the design was carried out using C# language and.Net programming tools. The flow diagram of the system is given in Fig. 3. The system follows the following four processing steps:
-
1.
The system verifies whether the OMNIWeb indices/parameters have been published. If they are published, it initially creates a graphical representation of these indices and then continues the process using the final CODE-GIMs. If they are not published, Rapid CODE-GIMs are utilized instead.
-
2.
At this stage, the lower and upper bounds are determined based on the data of the previous 15 days, and anomalies are detected. Identification of IGS stations falling in this region and presentation on the anomaly map for each hour.
-
3.
In the third stage, the aim is to download RINEX data of the stations within the vicinity of the anomaly region, obtain the necessary data for both the current day and the previous 15 days, and then carefully choose the stations that are appropriate for the subsequent stages of the process.
-
4.
In the concluding phase, the estimation of VTEC is derived using IONOLAB-TEC software, which processes GNSS observation data acquired from chosen stations. The outcomes from both the MA/HDI and ARIMA methods are presented in a visual format.

Flow chart of the global monitoring system
Monitoring the ionosphere regionally
In the regional monitoring of the ionosphere, TEC estimation is carried out using GPS observation data of IGS stations and Continuously Operating Reference Station (CORS) stations in the study area. The steps to be taken for this purpose can be briefly summarized as follows:
-
1.
Downloading the GPS data of CORS and IGS stations
-
2.
Estimation of GPS VTEC data using GPS-TEC software at IPP
-
3.
Elimination of VTEC values obtained using satellites below the 20° cut off angle
-
4.
Generating the VTEC maps using spline interpolation at 15-min intervals with a spatial resolution of 0.1° × 0.1°.
-
5.
Checking the VTEC maps for the 15-day period
-
6.
Analyzing anomalies with MA approach
-
7.
Graphical representation of regional anomaly maps
Other details of the ionosphere monitoring process are given in the flow chart in Fig. 4.

Flow chart of the regional monitoring system
Results
The GIM/Jason-based global and CORS TR stations-based regional results of GRIMS were examined for the geomagnetic active days of March 17, 18, 2015. Details of the results and output products of the system are given in the following subsections, respectively.
Global results
To examine the performance of GRIMS on a global scale, 17th, 18th March 2015 were considered. Index/parameter values for the experimental days are given in Fig. 5. Two days were considered because the storm commenced on March 17, 2015, when a CME arrived on Earth, and its effects continued on March 18, 2015. The sudden storm is observed on March 17, 2015 at 04:17 UT with a sharp increase in the wind speed. A similar increase is observed in the Bz and proton density parameters (Fig. 5). On March 18, 2015, although the indices/ parameters decreased relatively, the wind speed continues to increase. During the day, By, By, Dst and kp exceed the limit values. For the details of this storm authors refer to Astafyeva et al. (2015).

Indices/parameters during the intense geomagnetic storm of March 17, 18, 2015
Using the CODE-GIM maps from the period up to 15 days before March 17, 18, 2015, 1-h time resolution maps showing positive and negative anomalies according to the MA method were obtained (Figs. 6, 7, 8, 9). For a better view of the hourly variation of anomalies, these maps are also given in.gif format (Supplementary File 1). IGS stations were automatically determined in regions where the anomaly was over 5 TECU and lasted longer than 8 h on the relevant day.

Positive anomaly on March 17, 2015 and IGS stations falling into anomaly zones

Negative anomaly on March 17, 2015, and IGS stations falling into anomaly zones

Positive anomaly on March 18, 2015, and IGS stations falling into anomaly zones

Negative anomaly on March 18, 2015, and IGS stations falling into anomaly zones
Figures 6 and 7 show the positive and negative anomaly maps obtained on March 17, 2015. On this day, there are both positive and negative anomalies. It is seen that the positive anomalies are dominant, especially after 10 UT between 90° E and 60° W, and the highest anomaly occurs between 30° N and 60° N in the northern hemisphere mid-latitude region (Fig. 6). In addition, negative anomalies are observed at different levels in different parts of the world at all hours of the day while the highest anomaly is between 30° N and 60° N latitudes and 90° W–120° W longitudes (Fig. 7).
Anomaly maps of March 18, 2015, are given in Figs. 8 and 9. Positive anomalies are clear in the equatorial region between 1 and 12 h and anomaly levels are mostly below 20 TECU (Fig. 8). However negative anomalies are quite dominant in most parts of the world and occasionally exceed 40 TECU (Fig. 9). In addition, when the number of selected stations is examined, it is seen that negative anomalies last more than 8 h in many regions.
GRIMS determines the stations with the highest anomaly in three different latitude regions in the northern and southern hemispheres and obtains VTEC values with 30-s epoch intervals by using the observation data of these stations. In determining the stations for detailed analysis, 3 stations are selected from each region where 5 TECU or more anomalies are observed for at least 8 h. If there are more than 3 stations in the region, the first 3 stations with the highest anomaly are taken into account. Considering these points, the stations obtained for March 17, 18, 2015 are given in Fig. 10. As seen in Fig. 10, 4 stations are meeting this criterion on March 17–18, 2015. At these stations, UB and LB values were calculated using MA, HDI, and ARIMA techniques and are given in Figs. 11 and 12.

IGS stations showing the maximum anomaly in each latitude region (Red dotted stations on March 17, 2015, Green dotted on March 18, 2015)

UB-LB values (red), calculated by MA, HDI, and ARIMA methods and corresponding VTEC values (blue) at stations on March 17, 2015

UB-LB values (red), calculated by MA, HDI, and ARIMA methods and corresponding VTEC values (blue) at stations on March 18, 2015
When the UB and LB values obtained by three different methods in eight stations on both days are examined, it is seen that there are some differences. These differences cause the positive/negative anomaly duration to be slightly different. In addition, it is seen that the MA and HDI results are more compatible with each other (Figs. 11, 12). While positive anomalies are observed at stations in the mid-latitude region of the northern hemisphere (FLRS and PDEL), negative anomalies are observed at stations in the low-latitude regions of the northern (HYDE) and southern hemisphere (JOG2) (Fig. 11). When Figs. 6 and 7 are examined together with Fig. 11, it is seen that the results are compatible. In addition, it is seen that the data of the FLRS and PDEL stations, which are close to each other, are quite consistent with each other. The results on March 18, 2015 show that negative anomaly is dominant in all stations except the morning hours of the LPGS station (Fig. 12). As expected, the anomaly obtained at WUHN and JFNG stations located very close to each other is quite similar. When the results obtained at the stations are evaluated together with the anomaly maps (Figs. 8, 9) derived from GIMs, it is seen that they are consistent with each other. The working process of the global part of GRIMS is given in Supplementary File 2.
Jason TEC results
Since Jason satellites have about a 10-day repeat cycle, anomaly maps cannot be created due to the location of the data obtained on consecutive days does not exactly overlap. Therefore, GRIMS offers Jason VTEC maps on a daily basis. In this study, the experimental days (March 17, 18, 2015) and a few days before and after are given in Fig. 13. When the negative anomaly maps (based on GIMs) that occurred on March 18, 2015, are examined (Fig. 9) the presence of negative anomaly is observed in the region containing −30/ + 30 latitude and 120–180 longitude between 1 and 16 h. A similar condition is expected to show itself as a decrease in TEC values in the same region in the Jason maps. When all maps are examined in Fig. 13, it is seen that there is a decrease in TEC values in the region indicated by the red circle on March 18, 2015, compared to other days. This is important in terms of detecting the change in TEC values without creating anomaly maps by solely examining Jason maps on consecutive days.

VTEC maps obtained by Jason-2 on pre-, co-, and post-anomaly
Regional results
GRIMS is designed to monitor the ionosphere at the regional level as well as at the global level. Regional anomaly maps have higher spatial resolution than GIM and can be obtained for shorter time intervals. Currently, it can monitor Turkey regionally by using CORS-TR stations.
In the regional monitoring of the ionosphere over Turkey with GRIMS, anomaly maps were created at 15-min intervals for March 17/18, 2015 according to the flow chart given in Fig. 4. Due to the size of the article, only hourly maps are given in Figs. 14, 15, 16 and 17. Anomaly maps obtained at 15-min intervals are given in Supplementary File 3. In addition, the distribution of IPP points used in obtaining the anomaly maps is important to derive the desired results. Therefore, IPP maps are created to observe whether there are gaps in the selected region (Supplementary File 4). Figures 14, 15, 16 and 17 give positive and negative anomaly maps obtained by the MA method. When the regional anomaly maps of the experimental days are compared with the global anomaly maps given in Figs. 6, 7, 8 and 9, it is seen that the magnitudes of the anomalies are similar.

Positive anomaly over Turkey on March 17, 2015

Negative anomaly over Turkey on March 17, 2015

Positive anomaly over Turkey on March 18, 2015

Negative anomaly over Turkey on March 18, 2015
As seen in Fig. 14, the positive anomaly is dominant in this region on March 17, 2015. Although negative anomaly is dominant around the world on March 18, 2015 (Fig. 9), the level of anomaly in Turkey and its immediate surroundings is quite low. This situation is clearly seen in regional anomaly maps (Figs. 16, 17).
Conclusions
In this study, the details of the GRIMS, which provides global and regional monitoring of the ionosphere, and the results obtained for the determined active ionospheric days are given. Thanks to this system, the ionosphere can be monitored globally and possible anomalies are detected within the specified criteria. Global monitoring is conducted using GPS and Jason data. Anomalies determined by GPS are analyzed by MA, HDI, and ARIMA methods. Regionally, Turkey and its immediate surroundings can be monitored continuously. March 17, 18, 2015 with an intense geomagnetic storm was chosen for the application. This particular storm has been extensively examined in many studies. Some of these studies have focused on the effects of the storm on a global scale (Astafyeva et al. 2015; Dmitriev et al. 2017; Kader et al. 2022), while others have focused on the effects on the regional ones (Spogli et al. 2016; Sharma et al. 2020; Mridula et al. 2022; Chaurasiya et al. 2022). The global results obtained within the scope of this study were found to be compatible with the studies using the above-mentioned GNSS TEC/GIM TEC data. In addition, it was seen that the anomaly maps given in this study were entirely compatible with the maps given by Dmitriev et al. (2017).
The obtained results are given in detail in the article. Currently, GRIMS allows the user to access the output products, including anomaly maps, grid data, and indices/parameters. In addition to downloading data, it also sends the results for the date requested by the user to the provided e-mail address. The system also provides descriptions of the data and results. The system is still under development and in addition to the details given in the paper, it will have the following capabilities in the near future;
Future work
-
Users will have the opportunity to examine the results by selecting the stations they want
-
GRIMS will provide regional anomaly maps for those countries where their CORS systems are publicly available. In addition, if the users upload the observation data of their stations into the system, they will be able to access anomaly maps for their region
-
Integration of GLONASS, Galileo, and Beidou observation data for TEC prediction
-
Including Real-time GIMs in the system
-
By analyzing the long-term data, it will be possible to determine what level of TEC change in which regions the storms cause
-
The effects of Solar Cycles will be compared with each other
-
Not only deterministic parameters but also stochastic parameters will be presented
-
Using data from different data sources as well as GNSS and Jason
-
By including additional parameters and presenting output products, it will be possible to analyze not only the effects of space weather conditions but also the precursors of earthquakes and volcanoes on the ionosphere
-
Creating a high-resolution global map of the ionosphere by combining data from different data sources with appropriate methods
-
Currently, the system allows only single-day data requests, but in the future, it will be possible to select a specific date range for these requests
-
Automatically presenting the magnitude of anomalies together with their source
Data availability
Data that support the findings of this study are available upon request by contacting the corresponding author.
References
Akhoondzadeh M (2012) Anomalous TEC variations associated with the powerful Tohoku earthquake of 11 march 2011. Nat Hazards Earth Syst Sci 12:1453–1462. https://doi.org/10.5194/nhess-12-1453-2012
Akhoondzadeh M (2013) Genetic algorithm for TEC seismo-ionospheric anomalies detection around the time of the Solomon (Mw=8.0) earthquake of 06 february 2013. Adv Space Res 52(4):581–590. https://doi.org/10.1016/j.asr.2013.04.012
Akhoondzadeh M, De Santis A, Marchetti D, Piscini A, Jin S (2019) Anomalous seismo-LAI variations potentially associated with the 2017 Mw=7.3 Sarpol-e Zahab (Iran) earthquake from Swarm satellites, GPS TEC and climatological data. Adv Space Res 64:143–158. https://doi.org/10.1016/j.asr.2019.03.020
Alcay S, Gungor M (2020) Investigation of ionospheric TEC anomalies caused by space weather conditions. Astrophys Space Sci 365:150. https://doi.org/10.1007/s10509-020-03862-x
Alcay S, Yigit CO, Seemala G, Ceylan A (2014) GPS-Based ionosphere modeling: a brief review. Fresenius Environ Bull 23(3a):815–824
Arikan F, Erol CB, Arikan O (2003) Regularized estimation of vertical total electron content from global positioning system data. J Geophys Res 108(A12):1469. https://doi.org/10.1029/2002JA009605
Arikan F, Erol CB, Arikan O (2004) Regularized estimation of VTEC from GPS data for a desired time period. Radio Sci 39:RS6012. https://doi.org/10.1029/2004RS003061
Astafyeva E (2019) Ionospheric detection of natural hazards. Rev Geophys 57:1265–1288. https://doi.org/10.1029/2019RG000668
Astafyeva E, Zakharenkova I, Förster M (2015) Ionospheric response to the 2015 St Patrick’s day storm: a global multi-instrumental overview. JGR Space Phys 120:9023–9037. https://doi.org/10.1002/2015JA021629
Azpilicueta F, Nava B (2021) On the TEC bias of altimeter satellites. J Geodesy 95:114. https://doi.org/10.1007/s00190-021-01564-y
Bailey GJ, Su YZ, Balan N (1997) The Sheffield university plasma sphere ionosphere model- a review. J Atmos Terr Phys 59(13):1541–1552. https://doi.org/10.1016/S1364-6826(96)00155-1
Bent RB, Llewellyn SK (1973) Documentation and description of the bent ionospheric model. Space and Missile Organization, Los Angeles, CA, USA. https://doi.org/10.21236/ad0772733
Bilitza D (2001) International reference ionosphere 2000. Radio Sci 36:261–275. https://doi.org/10.1029/2000RS002432
Brack A, Männel B, Wickert J, Schuh H (2021) Operational multi-GNSS global ionosphere maps at GFZ derived from uncombined code and phase observations. Radio Sci 56:e2021RS007337. https://doi.org/10.1029/2021RS007337
Chaurasiya SK, Patel K, Kumar S, Singh AK (2022) Ionospheric response of St. Patrick’s day geomagnetic storm over indian low latitude regions. Astrophys Space Sci 367:103. https://doi.org/10.1007/s10509-022-04137-3
Chen P, Liu H, Ma Y, Zheng N (2020) Accuracy and consistency of different global ionospheric maps released by IGS ionosphere associate analysis centers. Adv Space Res 65(1):163–174. https://doi.org/10.1016/j.asr.2019.09.042
Dabbakuti JRKK, Ch B (2019) Ionospheric monitoring system based on the internet of things with Thingspeak. Astrophys Space Sci 364:137. https://doi.org/10.1007/s10509-019-3630-0
Daniell RE, Brown LD, Anderson DN, Fox MW, Doherty PH, Decker DT, Sojka JJ, Schunk RW (1995) Parameterized ionospheric model: a global ionospheric parameterization based on first principles models. Radio Sci 30(5):1499–1510. https://doi.org/10.1029/95RS01826
Daniell RE, Brown LD (1995) PRISM: a parameterized real-time ionospheric specification model version 1.5. Newton: computational physics. https://www.osti.gov/biblio/200160
Datta-Barua S, Doherty PH, Delay SH, Dehel T, Klobuchar JA (2003) Ionospheric scintillation effects on single and dual frequency GPS positioning, Proceedings of the 16th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GPS/GNSS 2003), Portland, OR, September 2003. p 336–346. https://www.ion.org/publications/abstract.cfm?articleID=5208
Di Giovanni G, Radicella SM (1990) An analytical model of the electron density profile in the ionosphere. Adv Space Res 10(11):27–30. https://doi.org/10.1016/0273-1177(90)90301-F
Dmitriev AV, Suvorova AV, Klimenko MV, Klimenko VV, Ratovsky KG, Rakhmatulin RA, Parkhomov VA (2017) Predictable and unpredictable ionospheric disturbances during St. Patrick’s day magnetic storms of 2013 and 2015 and on 8–9 march 2008. J Geophys Res Space Phys 122:2398–2423. https://doi.org/10.1002/2016JA023260
Emery BA, Lu G, Szuszczewicz EP, Richmond AD, Roble RG, Richards PG, Miller KL, Niciejewski R, Evans DS, Rich FJ, Denig WF, Chenette DL, Wilkinson P, Pulinets S, O’Loughlin KF, Hanbaba R, Abdu M, Jialo P, Igarashi K, Reddy BM (1996) Assimilative mapping of ionospheric electrodynamics in the thermosphere- ionosphere general circulation model comparisons with global ionospheric and thermospheric observations during the GEM/SUNDIAL period of march 28–29, 1992. J Geophys Res 101(A12):26681–26696. https://doi.org/10.1029/96JA01285
Gahirwal M, Vijayalakshmi M (2013) Inter time series sales forecasting. arXiv preprint arXiv:1303.0117. https://doi.org/10.48550/arXiv.1303.0117
Galkin IA, Reinisch BW, Huang X, Bilitza D (2012) Assimilation of GIRO data into a real-time IRI. Radio Sci 47:RS0L07. https://doi.org/10.1029/2011RS004952
Galkin IA, Reinisch BW, Vesnin AM, Bilitza D, Fridman S, Habarulema JB, Veliz O (2020) Assimilation of sparse continuous near-earth weather measurements by NECTAR model morphing. Space Weather 18:e2020SW002463. https://doi.org/10.1029/2020SW002463
Gao Y, Liu ZZ (2002) Precise ionosphere modelling using regional GPS network data. J Glob Position Syst 1(1):18–24
Guo J, Shi K, Liu X, Sun Y, Li W, Kong Q (2019) Singular spectrum analysis of ionospheric anomalies preceding great earthquakes: case studies of Kaikoura and Fukushima earthquakes. J Geodyn 124:1–13. https://doi.org/10.1016/j.jog.2019.01.005
Hyndman RJ (1996) Computing and graphing highest density regions. Am Stat 50(2):120–126. https://doi.org/10.2307/2684423
Hyndman RJ, Khandakar Y (2008) Automatic time series forecasting: the forecast package for R. J Stat Softw 27(3):1–22. https://doi.org/10.18637/jss.v027.i03
Kader SS, Dashora N, Niranjan K (2022) Spatial and temporal confinement of the ionospheric responses during the St. Patrick’s day storm of march 2015. Space Weather 20:e2022SW003157. https://doi.org/10.1029/2022SW003157
Karatay S (2020) Estimation of frequency and duration of ionospheric disturbances over Turkey with IONOLAB-FFT algorithm. J Geodesy 94(9):89. https://doi.org/10.1007/s00190-020-01416-1
Kongcharoen C, Kruangpradit T (2013) Autoregressive integrated moving average with explanatory variable (ARIMAX) model for Thailand export. In 33rd International Symposium on Forecasting, South Korea. p 1–8. https://www.researchgate.net/publication/255731345_Autoregressive_Integrated_Moving_Average_with_Explanatory_Variable_ARIMAX_Model_for_Thailand_Export
Lin JW (2013) Taiwan’ Chi-Chi earthquake precursor detection using nonlinear principal component analysis to multi-channel total electron content records. J Earth Sci 24(2):244–253. https://doi.org/10.1007/s12583-013-0325-2
Liu JY, Chen YI, Chen CH, Liu CY, Chen CY, Nishihashi M, Li JZ, Xia YQ, Oyama KI, Hattori K, Lin CH (2009) Seismo-ionospheric GPS total electron content anomalies observed before the 12 may 2008 M(w)7.9 Wenchuan earthquake. J Geophys Res 114:04320. https://doi.org/10.1029/2008JA013698
Liu A, Li Z, Wang N, Zhang Y, Krankowski A, Yuan H (2022) SHAKING: adjusted Spherical Harmonics Adding KrigING method for near real-time ionospheric modeling with multi-GNSS observations. Adv Space Res. https://doi.org/10.1016/j.asr.2022.07.049
Martire L, Krishnamoorthy S, Vergados P, Romans LJ, Szilágyi B, Meng X, Anderson JL, Komjáthy A, Bar-Sever YE (2023) The GUARDIAN system-a GNSS upper atmospheric real-time disaster information and alert network. GPS Solut 27:32. https://doi.org/10.1007/s10291-022-01365-6
Milanowska B, Wielgosz P, Krypiak-Gregorczyk A, Jarmołowski W (2021) Accuracy of global ionosphere maps in relation to their time interval. Remote Sens 13:3552. https://doi.org/10.3390/rs13183552
Mridula N, Manju G, Sijikumar S, Pant TK, Choudhary RK (2022) On the significant impact of the 17 march 2015 St. Patrick’s day geomagnetic storm on the Ionosphere over Indian region. Adv Space Res 70(2022):3674–3685. https://doi.org/10.1016/j.asr.2022.08.022
Muhammad A, Külahcı F (2022) A semi-supervised total electron content anomaly detection method using LSTM-auto-encoder. J Atmos Solar Terr Phys 241:105979. https://doi.org/10.1016/j.jastp.2022.105979
Nayir H, Arikan F, Arikan O, Erol CB (2007) Total electron content estimation with Reg-Est. J Geophys Res 112:A11313. https://doi.org/10.1029/2007JA012459
Poudel P, Silwal A, Ghimire BD, Gautam SP, Karki M, Chapagain NP, Adhikari B, Pandit B, Amory-Mazaudier C (2022) A study of vTEC above Nepal exploring different calibration techniques, including a comparison with the NeQuick-2 model. Astrophys Space Sci 367(4):41. https://doi.org/10.1007/s10509-022-04041-w
Pulinets S, Kotsarenko AN, Ciraolo L, Pulinets IA (2007) Special case of ionospheric day to day variability associated with earthquake preparation. Adv Space Res 39(5):970–977. https://doi.org/10.1016/j.asr.2006.04.032
Rideout W, Coster A (2006) Automated GPS processing for global total electron content data. GPS Solut 10(3):219–228. https://doi.org/10.1007/s10291-006-0029-5
Roma-Dollase D, Hernández-Pajares M, Krankowski A, Kotulak K, Ghoddousi-Fard R, Yuan Y, Li Z, Zhang H, Shic C, Wang C, Feltens J, Vergados P, Komjaty A, Schaer S, García-Rigo A, Gómez-Cama JM (2018) Consistency of seven different GNSS global ionospheric mapping techniques during one solar cycle. J Geodesy 92(6):691–706. https://doi.org/10.1007/s00190-017-1088-9
Rukundo W, Shiokawa K, Elsaid A, AbuElezz OA, Mahrous AM (2023) A machine learning approach for total electron content (TEC) prediction over the northern anomaly crest region in Egypt. Adv Space Res 72(3):790–804. https://doi.org/10.1016/j.asr.2022.10.052
Said SE, Dickey DA (1984) Testing for unit roots in autoregressive-moving average models of unknown order. Biometrika 71(3):599–607. https://doi.org/10.1093/biomet/71.3.599
Scherliess L, Schunk RW, Sojka JJ, Thompson DC, Zhu L (2006) Utah state university global assimilation of ionospheric measurements Gauss–Markov Kalman filter model of the ionosphere: model description and validation. J Geophys Res 111:A11315. https://doi.org/10.1029/2006JA011712
Seemala G (2011) GPS-TEC analysis application. Technical report. Institute for Scientific Research, Boston College, USA. https://seemala.blogspot.com/
Sezen U, Arikan F, Arikan O, Ugurlu O, Sadeghimorad A (2013) Online, automatic, near-real time estimation of GPS-TEC: IONOLAB-TEC”. Space Weather 11:297–305. https://doi.org/10.1002/swe.20054
Sharma SK, Singh AK, Panda SK, Ahmed SS (2020) The effect of geomagnetic storms on the total electron content over the low latitude Saudi Arab region: a focus on St. Patrick’s day storm. Astrophys Space Sci 365:35. https://doi.org/10.1007/s10509-020-3747-1
Singh AK, Bhargawa A, Siingh D, Singh RP (2021) Physics of space weather phenomena: a review. Geosciences 11:286. https://doi.org/10.3390/geosciences11070286
Spoelstra TA (1996) A climatology of quiet/disturbed ionospheric conditions derived from 22 years of Westerbork interferometer observations. J Atmos Solar Terr Phys 58(11):1229–1258. https://doi.org/10.1016/0021-9169(95)00143-3
Spogli L, Cesaroni C, Mauro DD, Pezzopane M, Alfonsi L, Musicò E, Povero G, Pini M, Dovis F, Romero R, Linty N, Abadi P, Nuraeni F, Husin A, Huy ML, Lan TT, La TV, Pillat VG, Floury N (2016) Formation of ionospheric irregularities over Southeast Asia during the 2015 St. Patrickˈs Day Storm. J Geophys Res: Space Phys 121:12211–12233. https://doi.org/10.1002/2016JA023222
Vadakke Veettil S et al (2019) The ionosphere prediction service prototype for GNSS users. J Space Weather Space Clim 9:A41. https://doi.org/10.1051/swsc/2019038
Yang H, Monte-Moreno E, Hernández-Pajares M, Roma-Dollase D (2021) Real-time interpolation of global ionospheric maps by means of sparse representation. J Geodesy 95:71. https://doi.org/10.1007/s00190-021-01525-5
Yasyukevich Y, Mylnikova A, Vesnin A (2020a) GNSS-based non-negative absolute ionosphere total electron content, its spatial gradients, time derivatives and differential code biases: bounded-variable least-squares and taylor series. Sensors 20(19):5702. https://doi.org/10.3390/s20195702
Yasyukevich Y, Kiselev AV, Zhivetiev IV, Edemskiy IK, Syrovatskii SV, Maletckii BM, Vesnin AM (2020b) SIMuRG: system for ionosphere monitoring and research from GNSS. GPS Solut 24(3):1–12. https://doi.org/10.1007/s10291-020-00983-2
Yasyukevich YV, Vesnin AM, Kiselev AV, Mylnikova AA, Oinats AV, Ivanova VA, Demyanov VV (2022) MITIGATOR: GNSS-based system for remote sensing of ionospheric absolute total electron content. Universe 8(2):98. https://doi.org/10.3390/universe8020098
Zhang GP (2003) Time series forecasting using a hybrid ARIMA and neural network model. Neurocomputing 50:159–175. https://doi.org/10.1016/S0925-2312(01)00702-0
Acknowledgements
We would like to thank the Center for Orbit Determination in Europe (CODE) for providing GIM data, the Ionospheric Research Laboratory (IONOLAB) for the IONOLABTECV1.35 software. We also thank the International GNSS Service (IGS) for GPS observation data, the NASA/GSFC’s Space Physics Data Facility’s OMNIWeb service (https://omniweb.gsfc.nasa.gov/) for space weather indices/parameters, the National Oceanic and Atmospheric Administration (NOAA) for providing Jason altimetry data (https://www.ncei.noaa.gov/data/oceans/), the General Directorate of Land Registry and Cadastre for providing CORS-TR daily observation data, NOAA National Geophysical Data Center (NCEI) for providing Bx, By, Bz, Proton Density and Solar Wind Speed data, the World Data Center for Geomagnetism, Kyoto for Dst data, the Deutsches GeoForschungsZentrum for kp and F10.7 data, and the NOAA Space Weather Prediction Center for providing proton flux data. The authors also thank the editor and anonymous reviewers for their valuable comments and guidance.
Funding
Open access funding provided by the Scientific and Technological Research Council of Türkiye (TÜBİTAK).
Author information
Authors and Affiliations
Contributions
B.N.O. software development, writing; S.A. writing—original draft preparation and designing the system; S.O. preparing the global part, reviewing and editing the paper; A.P. preparing HDI and ARIMA parts; G.K.S. integrating GPS software to the GRIMS and reviewing the paper; G.O. integrating Jason data to the GRIMS.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Ozdemir, B.N., Alcay, S., Ogutcu, S. et al. GRIMS: global and regional ionosphere monitoring system. GPS Solut 28, 154 (2024). https://doi.org/10.1007/s10291-024-01702-x
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-024-01702-x