
Abstract
The need for precise orbit determination (POD) has grown significantly due to the increased amount of space-based activities taking place at an accelerating pace. Accurate POD positively contributes to achieving the requirements of Low-Earth Orbit (LEO) satellite missions, including improved tracking, reliability and continuity. This research aims to systematically analyze the LEO–POD in four aspects: (i) data sources used; (ii) POD technique implemented; (iii) validation method applied; (iv) accuracy level obtained. We also present the most used GNSS systems, satellite missions, processing procedures and ephemeris. The review includes studies on LEO–POD algorithms/methods and software published in the last two decades (2000–2021). To this end, 137 primary studies relevant to achieving the objective of this research were identified. After the investigation of these primary studies, it was found that several types of POD techniques have been employed in the POD of LEO satellites, with a clear trend observed for techniques using reduced-dynamic model, least-squares solvers, dual-frequency signals with undifferenced phase and code observations in post-processing mode. This review provides an understanding of the various POD techniques, dataset utilized, validation techniques, and accuracy level of LEO satellites, which have interest to developers of small satellites, new researchers and practitioners.
Similar content being viewed by others

Explore related subjects
Find the latest articles, discoveries, and news in related topics.Avoid common mistakes on your manuscript.
Introduction
Orbit determination of satellites, from the first man-made satellite, has traditionally used several observations over the years, eventually from cameras, radio Doppler tracking systems and radio transmissions. The first application of the Global Navigation Satellite System (GNSS) was in the precise determination of the position of fixed ground receivers to aid the study of the dynamics of the earth’s surface. This led to the first application of the Global Positioning System (GPS) in the orbit determination of satellites (Mur and Dow 1997). Later on, the application of GPS to the precise orbit determination (POD) to other low-earth-orbit (LEO) satellites was implemented. With these advancements, GNSS receivers have now been designed to meet the requirements for POD and have been applied to many satellites requiring accurate knowledge of their orbits depending on the objectives of their missions (ESA 2021).
The measurement environment, the technique used for POD processing and the mission application of the satellite can affect the performance of the POD process. Furthermore, besides accuracy, a growing interest has been in reducing latency in achieving a precise solution, which benefits many end-users as it provides faster access to the required orbit solutions (Gebre-Egziabher and Gleason 2009).
The development of many new space applications in the area of navigation, telecommunication, remote sensing and earth observation systems can benefit from the precise tracking of satellite orbits using onboard GNSS receiver data. Future trends show that LEO satellites have the potential to deliver several benefits over medium earth orbit (MEO) satellites in terms of navigation, precise point positioning and timing (PNT), as well as location-enabled communications (Prol et al. 2022). This is because LEO satellites are at significantly lower altitudes than MEO and geosynchronous (GEO) GNSS satellites and operate at higher speed (Borthomieu 2014; Peterson 2003).
Existing literature review (Allahvirdi-Zadeh et al. 2021b) mainly covers the state-of-the-art POD based on undifferenced GNSS observations. A work-in-progress review paper (Selvan et al. 2021) made a general review on the different POD techniques of LEO satellites. To the best of the author's knowledge, there is no existing systematic literature review on POD of LEO satellites. Therefore, we performed a systematic review based on primary studies making use of the procedure suggested by PRISMA (Preferred Reporting Items for Systematic Reviews and Meta-Analyses) (Kitchenham 2004). The review did not focus on the theoretical background behind POD as stated in several books (for example, Montenbruck et al. 2002). Instead, a clear view on various POD and its associated results is provided by summarizing factors driving the POD solution. The review is based on the context of four research questions, which were carefully selected to fulfill the aim of the systematic review in identifying the data sources used, POD technique implemented, validation method applied, and accuracy level obtained. Table 1 provides a list of research questions used in the review process. The summarized results not only provide a clear picture on which orbit model, observation types, estimators, processing procedure and validation method have performed better, but it also shows categories which require further improvements. Therefore, the review helps researchers focus on areas that need further improvements and presents the POD strategies for the highest accuracy.
From the primary studies, we identify the data sources (real, simulated, or pre-processed), instruments (GNSS, non-GNSS or hybrid), satellite mission, GNSS systems and ephemeris used (RQ1). This will help in making decisions concerning the type of dataset, instruments, satellite mission, GNSS systems and ephemeris being used by the practitioners. Next is to analyze the different POD methods, algorithms or software used (RQ2). This will help in understanding the orbit model (kinematic, dynamic, reduced dynamic), estimator (least square, Kalman filter, software) and the processing procedure (real-time, post-processing) carried out. In the next research question (RQ3), the different validation methods of the POD solutions used in the primary studies are identified. Finally, in RQ4, accuracy levels obtained based on the adopted POD techniques, instruments and products are analyzed. The following sections provide the outcomes of this review and discuss the findings based on the RQs which are also summarized as a table in the document “Supplement 2.”
Data sources used in POD (RQ1)
The dataset used has an influence in estimating POD. This section shows an overview of the most common data sources used for POD.
Instruments
We have classified the data sources derived from three main categories of instruments, as follows: GNSS, Non-GNSS and Hybrid. The distribution in percentage of the studies that used each of those selected categories of instruments is illustrated in Fig. 1.

Percentage of studies depending on the type of instrument
GNSS refers to the experiment from a GNSS receiver onboard the LEO satellite or simulated GNSS data using a simulator. GNSS data were used in 105 (76.6%) primary studies.
Non-GNSS refers to data other than that from the GNSS receiver utilized in the POD. This includes data from SLR, DORIS as well as accelerometer and attitude data. Non-GNSS data were used in 16 (11.7%) primary studies. Certain primary studies made use of a combination of two or more non-GNSS-based observations to estimate the precise orbits of the satellite. In addition, apart from the listed categories of data sources, there are other approaches implemented by the primary studies in POD. This includes studies utilizing the radio interferometer observations (Sakamoto and Nishio 2011) and inter-satellite links (Li et al. 2019a). These studies did not use any onboard GNSS data from the receiver or any data from the traditional non-GNSS-based technique. They used completely different approaches including interferometry-based satellite orbit estimation and inter-satellite link-based estimation of satellite orbits. For the sake of simplicity, these studies were also categorized as non-GNSS in Fig. 1.
Hybrid refers to combination of both GNSS and non-GNSS data utilization for the POD of the satellite. For example, data from a GNSS receiver, DORIS and SLR are utilized in the determination of the satellite orbits. 14 (10.2%) primary studies used hybrid-based observations. It is interesting to note that 2 (1.5%) studies made use of GNSS and hybrid data at the same time in their studies on POD estimation (Svehla and Rothacher 2003; Jäggi et al. 2005). These studies were categorized as GNSS + Hybrid in Fig. 1. Table S8 in the document “Supplement 1” provides information on the categories of instruments used by the primary studies.
To quantify the last trends on the POD techniques, Fig. 2 shows the number of the studies based on the year of publication. With the launch of satellites such as TOPEX/Poseidon, GRACE, CHAMP and GOCE, more research work based on these satellite data is carried out. The satellite missions’ section will provide more detail on the POD carried out for different satellite missions.

Distribution of the types of instruments used in the primary works in terms of the year of publication
Satellite missions
From the primary studies, POD estimation was performed based on the instrumental data (GNSS, non-GNSS and hybrid) from various LEO satellite missions. 32 studies utilized GRACE satellite mission data, 24 studies used CHAMP data and 12 made use of HY-2A. Other satellite missions include GOCE, TOPEX/Poseidon, Swarm, Jason-1. Certain studies utilized data from two or more satellite missions and provided a comparison of accuracy levels reached for each satellite mission.
Experimental, simulated or pre-processed data
Most of the LEO satellites are equipped with a GNSS receiver for missions that require the orbital knowledge of the satellite. Hence, experimental or real onboard GNSS receiver data was used to estimate precise orbit of the satellites. Experimental data from DORIS and SLR are also utilized in estimating POD. In addition, primary studies also focused on retrieving onboard GNSS data on the ground and pre-processing them prior to the POD of the satellite. Meanwhile, simulated multi-GNSS observations are generated using GNSS simulator to estimate orbital solutions. From the primary studies, 113 (82.48%) studies used real or experimental data, 6 (4.38%) studies used simulated data, 2 (1.46%) studies used real and simulated data, while 16 (11.67%) studies used pre-processed data. Table S9 in the document “Supplement 1” provides information on the type of data used by the primary studies.
GNSS systems and ephemeris
The GNSS Systems used in the primary studies include GPS only 79% (109 studies), BeiDou (BDS) only 0.73% (1 study), GPS + BDS 6.6% (9 studies), GPS + Galileo (GAL) 0.73% (1), and GPS + simulated GPS, GLONASS and BDS 0.73% (1 study). Each of these GNSS systems have their own products to describe the orbit trajectory by ephemeris. The ephemeris products are categorized as broadcast and precise. The broadcast product, which is embedded to the system signal, allows the description of the GNSS orbits in real-time at a metric-level accuracy. Considering the studies using GNSS systems, around 9% have used broadcast ephemerids. The remaining 91% of studies have used precise products (ultra-rapid, rapid, and final) provided by the IGS analysis centers.
POD techniques (RQ2)
Several types of POD techniques were applied in the primary studies. For practical convenience, different techniques are organized based on four characteristics: (1) orbit model, (2) observations, (3) estimator and (4) processing procedure. Table 2 shows the main topics of each category. Figure 3 shows the number of studies using each of these categories. A clear trend is observed for techniques using reduced-dynamic orbits, least-squares solvers, dual-frequency (DF) signals with undifferenced (UD) phase and code observations, in post-processing mode. Detailed information about the POD techniques in each of the primary studies is shown in the next subsections, with the corresponding meaning of the abbreviations.

Distribution of the studies based on the used POD techniques
Orbit model
The orbit models define the rules to govern the satellite motion within the estimated trajectory. The three main methods used by the primary studies are kinematic, dynamic and reduced dynamic. The kinematic orbit model can be related to a point positioning method that determines the orbit trajectory with a purely geometrical relation. The LEO 3D coordinates are obtained epoch-by-epoch as independent solutions. The main output is epoch-wise ephemeris with discrete time solutions. The kinematic model provides 3D coordinates, ambiguities and receiver clocks when using GNSS data. Contrary to kinematic orbit, the dynamic model depends solely on an equation of motion governed by physical laws. Force models are used to represent the gravitational and non-gravitational dynamic parameters. Main parameters are related to the gravitational forces, atmospheric drag, solar radiation pressure and earth radiation pressure. As a result, the purely dynamic POD provides continuous positions, even if the initial positions have data gaps. Since it is difficult to determine an ideal dynamic orbit for the heavily perturbed environment of LEO satellites, uncertainties and perturbations vary significantly depending on the adopted force models. The orbit errors, therefore, grow with the satellite arc length. The force models have been significantly improved in the last few years since the GRACE and GOCE gravity missions were successfully used to determine static/temporal gravity field models (Förste et al. 2011). Nevertheless, the reduced-dynamic model is typically used to attenuate the unmodeled or mismodeled force mode errors. The reduced-dynamic technique combines the kinematic and dynamic models by introducing a stochastic process in the representation of the trajectory. The residual of the estimations is adjusted within the orbit determination to help the compensation of remaining force model deficiencies. Most often, empirical accelerations are included in the system at the radial, along-track, and cross-track (RAC) directions. As a disadvantage, the reduced-dynamic solutions need denser and geometrically stronger tracking data. Therefore, the reduced dynamic orbits are less sensitive to dynamic modeling errors but more to measurement errors (Guo et al. 2014). Table 3 provides the advantages and disadvantages of the three orbit models.
Dramatic improvements in gravity field modeling have been done in the latest decades (Nerem et al. 1994; Pail et al. 2011; Tapley et al. 2005). Hence, the remaining deficiencies in the dynamic model are mostly related to the non-conservative forces acting on the satellite surface due to atmospheric drag and radiation pressure. An efficient non-gravitational force modeling can produce a dynamic orbit solution with an accuracy of 1 cm (Mao et al. 2021). Density temperature model (DTM), box-wing model and Albedo and Infrared model are commonly used models to calculate the atmospheric drag, solar radiation and earth radiation pressure, respectively. Other force models, such as static and temporal force models, must be considered for LEOs. EIGEN-6C, EGM 2008, JGM-3, GGM05C are the gravity models used along with surface force modeling to reduce the error sources (Choi et al. 2010b; Flohrer et al. 2011; Gao et al. 2015; Guo et al. 2014; Kang et al. 2006, 2020; Kong et al. 2014, 2018). On the other hand, the kinematic model relying only on GNSS measurements is sensitive to poor geometry, measurement errors and noise (Byun 2003; Chen et al. 2017; Li et al. 2019b), while the reduced-dynamic technique is limited by the accuracy of the dynamic model parameters discussed and measurement model errors (Allahvirdi-Zadeh et al. 2021b; Zelensky et al. 2010).
Observations
Most popular observations used in POD determinations allow range-based positioning techniques using distance measurements. Onboard receivers of the Doppler Orbitography and Radio-positioning Integrated by Satellite (DORIS) are one of the most traditional techniques. An antenna mounted on the satellite is pointed toward the earth to receive radio signals emitted by the ground stations. The frequency shift caused by the Doppler effect is the main observation used to determine the range rate between the ground stations and LEO satellites.
Another relevant type of observation is provided by Satellite Laser Ranging (SLR). In SLR, ground stations continuously emit laser pulses in the optical spectrum and the LEO satellites are equipped with retroreflectors to reflect the laser pulse back. The basic observation is twice the laser time of flight between the ground station and a satellite. The observations are distributed as normal point data, containing a time stamp, range values, and precision. Due to the high-precise measurements, SLR is one of the main means of external validation of the POD estimations.
The last type of observation has gradually become the primary source of precise orbit determination for many satellite missions. The pseudorange observations provided by GNSS allow range-based positioning with a few meters of precision. The precision of a few meters can pose a crucial issue to the POD. Therefore, more sophisticated GNSS techniques also incorporate carrier phase measurements together with specific combinations. The basic pseudorange and phase combination from the primary studies are the single-frequency (SF), double-frequency (DF), triple-frequency (TF), undifferenced (UD), single-difference (SD), double-difference (DD) and triple-difference (TD). Transmitting with DF and TF helps to eliminate ionospheric effects. UD is the raw (unprocessed) carrier phase and pseudorange observables from an onboard receiver. SD approaches utilize the difference between GNSS observations of two distinct receivers or time. DD refers to a combination of two SDs and TD is a combination of two DDs. The formed SD, DD and TD can be obtained between LEO and ground stations, as well as LEO and other LEO satellites.
Estimators
The estimation process of 3D satellite coordinates, velocities, accelerations and the drag forces are typically processed by Kalman filters (KF) and least squares (LSQ). Variants of the Kalman filter used in the primary studies are the extended Kalman filter (EKF), unscented Kalman filter (UKF) and Sequential Kalman filter (SKF). The POD software used by the primary studies include JPL GIPSY/OASIS, Van Martin Systems, Inc (VMSI), National University of Defense Technology Orbit Determination Toolkit (NUDTTK), Position And Navigation Data Analyst (PANDA), Navigation Package for Earth Orbiting Satellites (NAPEOS), BAHN, GEODYN, SATODS, BERNESE, EPOS-OC, GUTS, RTODLEO, GPS High-Precision Orbit Determination Software Tools (GHOST) and SHORDE-III. Table S10 in the document “Supplement 1” provides detailed information on various POD software used by the primary studies.
Processing procedure
The processing procedure of POD can be in real-time or post-processed, depending on the type of application. Real-time processing is essential in formation flying (D’Amico et al. 2012; Leung and Montenbruck 2012), satellite altimetry (Calman and Manzi 1989; Jayles et al. 2010), proximity operations (Mahajan et al. 2013) and geo-referencing (Wang et al. 2015). The post-processed procedure is carried out for applications such as radio occultations (Hwang et al. 2011b; Innerkofler et al. 2020; Montenbruck et al. 2013) and synthetic-aperture radar (SAR) missions (Wermuth et al. 2012; Choi and Lee 2011). The real-time processing is done for the onboard orbit determination procedure, where the POD solution is obtained in real-time. In post-processed procedure, data collected from the satellite mission on the ground are used for orbit determination. Depending on the application, POD solutions may be available with different latencies, from several hours to several days. The accuracy levels generally reached between meters to millimeter levels, while in real-time orbit determination procedure, the accuracy levels range from meter to centimeter levels. Most primary studies used post-processing orbit determination procedures to improve POD accuracy. The real-time POD process needs further improvements in the way GNSS ephemeris are obtained in real-time since the practical implementation is hindered by the limited availability of suitable modems or GNSS receivers for acquiring such correction data on LEO platforms (Montenbruck et al. 2022). For instance, the LEO satellites can track broadcast ephemeris in real-time while precise ephemeris requires internet access. Out of 137 primary studies, only 22 carried out POD based on real-time orbit determination, while two implemented real-time and post-processing orbit determination procedures. Table S11 in the document “Supplement 1” shows the processing procedure adopted by the primary studies.
Validation methods (RQ3)
The orbit solution estimated for the LEO satellite using POD technique or software needs to be validated. There are numerous ways of validating the orbit solutions estimated by the POD technique. An independent orbit validation process can be set up using the SLR station tracking measurements. In this context, some primary studies offered comparisons between their external POD processing solutions based on either GNSS or DORIS (non-GNSS) data with that obtained from SLR. However, it is important to validate the orbital products independently. Hence, SLR is used as a standard technique for validating the POD solution when the retroreflectors are installed along the sides of the satellite.
The external products offered by providers such as NASA Jet Propulsion Laboratory (JPL), Center National D’Etudes Spatiales (CNES), Delft Institute for Earth-Oriented Space Research (DEOS), German Space Operations Center (DLR), International GNSS Services (IGS) and The German Research Center for Geosciences (GFZ) are used for validation purposes. The products include CNES precise orbits, rapid science orbit (RSO), precision orbit ephemeris (POE), JPL post-science orbits (PSO), JPL ephemeris, IGS orbit products (ultra-rapid, rapid and final) and GFZ post-processed science orbits (PSO). Other validation methods include orbit overlap differences (OODs), K-band, orbit fits, orbit comparison with GPS derived orbits, NORAD TLE, Radar and intercomparison using software packages.
Accuracy of the POD studies (RQ4)
The accuracy performance of the different POD techniques and software used by the primary studies for orbit determination of LEO satellites is presented in this section. The accuracy of the POD algorithm for each study was expressed either in RMS, standard deviation, radial, cross-track, along-track and percentage improvements. We have extracted an average accuracy value for each study with metrics in 3D RMS (1-sigma). However, certain studies provided accuracy in radial direction (1-sigma), and 1D RMS (1-sigma). The overall accuracy among all the reviewed studies based on 3D RMS (1-sigma) is presented in Fig. 4. This figure shows the number of studies that have obtained accuracy lying at a certain interval. Studies with metric accuracy were excluded from the analysis for better visualization.

Average accuracy of the related works
Our investigation shows that most works have obtained great accuracy in the LEO orbit determination. Around 8.2% of the studies have obtained less than or equal to centimeter-level accuracy, about 13% have obtained an accuracy between 1 to 2 cm, and about 14% have obtained 2 to 3 cm. There is also a predominant trend with lower accuracy, where 14% of the works have obtained a POD accuracy lying around 5 cm.
The performance difference among the studies exists due to several reasons. To detect the main reasons, the next subsections show details considering five categories: (1) orbit model, (2) ephemeris, (3) receiver frequency, (4) type of observations and (5) estimators.
Orbit model
Figure 5 presents the median value of the POD accuracy of the primary studies when categorized depending on the orbit model. As previously mentioned, we have identified three main models: kinematic, dynamic and reduced dynamic. Here, we include an additional label, named mixed, to represent the studies that have used more than one model in their work. The accuracy levels based on the orbit models mostly vary between 3.75 and 13 cm, while the mixed model comparison studies produce the best results. Purely kinematic solutions provided less accurate results. It is relevant to notice that we have identified an interesting pattern when correlating the model accuracy with the number of studies using the specific model. To understand this pattern, it is necessary to compare the accuracy shown in Fig. 5 with the number of studies shown in Fig. 3. In this comparison, it is possible to see that the kinematic model was less used and less accurate. The dynamic model is proportionally more used and more accurate in comparison with the kinematic. The reduced dynamic is the most used and the most accurate among the three models.

Median accuracy of the primary studies when classified depending on the orbit models
Ephemeris
To show the level of accuracy one can obtain when using precise or broadcast GNSS ephemeris, Fig. 6 (left) shows the median values of accuracy for these two distinct categories. As it can be seen, the median value considering all studies with broadcast ephemeris lies around 40 cm, while precise ephemeris lies around 4 cm. This clear difference is well justified since broadcast ephemeris allows a GNSS satellite orbit description within meters of accuracy, while precise products describe the GNSS satellite orbits within a few centimeters. The number of studies shown in Fig. 6 (right) is also proportional to the accuracy; about 91% of studies use precise orbit products, while 9% use broadcast data.

Median accuracy (left) and the number of studies (right) of the primary studies when classified, depending on the type of GNSS ephemeris
Frequency
Figure 7 (left) shows the median accuracy of the LEO/POD solutions when using single-frequency (SF) or dual-frequency (DF) GNSS receivers. As expected, great improvement in accuracy is observed in the studies using dual frequency. Indeed, single-frequency solutions presented a median accuracy of 75 cm, while dual-frequency solutions achieved 4.25 cm. The number of studies shown in Fig. 7 (right) is also proportional to the accuracy; 89.6% of studies related to POD determination with dual-frequency receivers, while the remaining 10.4% are related to single-frequency solutions.

Median accuracy and number of studies based on the type of GNSS frequency used
Observations
Regarding the obtained accuracy depending on the types of observations, Fig. 8 shows a comparison between the UD, SD, DD, TD, DORIS and SLR observations. We have excluded all metric solutions from the sample for better comparison. Overall, a very compatible accuracy between the distinct types of observations can be observed.

Median accuracy of the primary studies when classified depending on the observations
The best accuracy among the GNSS techniques was obtained when employing DDs and TDs, reaching 2.5 cm and 2.4 cm, respectively. The UD and SD approaches are not that far, providing an accuracy of 6 cm and 7 cm, respectively. The best accuracy was obtained by techniques employing TD observations, reaching up to 2.4 cm in the median. Doppler-based observations obtained an accuracy of 7.7 cm. As for SLR observations, a non-expected accuracy of 9 cm was obtained. Indeed, SLR measurements are known to be very precise. Their solutions are very often used as the benchmark for the POD validations. The accuracy values obtained in UD, SD, DD, TD and DORIS were evaluated using the SLR measurements as a reference in many works of the primary studies. The problem, however, is due to the challenge of validating the method used as a reference. The primary studies have used distinct techniques to validate the SLR results in a way that the obtained accuracy may be intrinsic to the validation methods.
The number of studies (Fig. 3) of the linear combinations does not follow the same pattern as observed in the previous analysis. Most studies (around 62%) were conducted using UD observations, which are not the most accurate. A possible justification is that the UD approaches are much more simplified techniques than the relative positioning using DD or TD and much more popular than DORIS or SLR. As a user, GNSS point positioning techniques using UD observations require measurements from a unique GNSS receiver on LEO, while relative techniques use differenced observations formed between multiple GNSS receivers. The PPP technique using UD is faster compared to DD approach. However, while the GPS satellite orbit and clocks must be determined in PPP, the DD approach reduces the orbit and clock-related errors from the observation model due to the DD formed between LEO satellite and a worldwide network of GNSS receiver stations on the ground. When multiple studies are considered together, it becomes apparent that the impact of multipath and satellite visibility on DD combinations is comparatively less significant than the errors arising from orbit and clock inaccuracies in UD measurements. For instance, the most accurate solutions given by BERNESE require forming DDs between the target LEO satellite and GNSS receiver stations. This adds a relevant burden on the computational process. Obtaining around 6 cm in POD determinations seems to be accurate enough for many applications, so, understandably, many studies prefer not adding relevant complexity to UD POD technique.
Estimator
As for the accuracy considering the estimators, Fig. 9 shows the median values of the primary studies. An evident better accuracy is obtained when using batch solutions given by least squares or a specific software compared to Kalman filter estimators. The accuracy of 4 cm and 4.8 cm by least squares and software, respectively, is about eight times smaller than the ones provided by Kalman filters. This occurs because Kalman filters are mainly applied in real-time processes, while least square uses post-processed products. Therefore, the presented analysis mainly reflects the difference between post-processing and real-time solutions. As expected, post-processing solutions are more accurate.

Median accuracy of the primary studies when classified depending on the estimator methods
Discussion
The POD accuracy requirements vary depending on the satellite missions. For example, in remote sensing satellite missions producing optical images, the orbital accuracy can be in tens of meters (Chung et al. 2012). ALOS satellite mission requires orbit determination accuracy within meter level for precise mapping using satellite imagery (Nakamura et al. 2007). Remarkable advances in POD were mainly driven by the various satellite altimetry missions such as Topex/Poseidon, Jason-1, GRACE, sentinel-3 and sentinel-6. A radial orbit accuracy in centimeters is required to map the altimetric measurements of sea-surface heights (Haines et al. 2011). Further, centimeter-level satellite orbit can ensure high geolocation accuracy of TerraSAR-X and TanDEM-X missions and change detection on the earth’s surface with ICEYE’s SAR satellites (Hong et al. 2017; ICEYE 2022). Proba-3 satellites require a millimeter-level accuracy for high-precision formation flying to achieve scientific coronagraphy (Enderle et al. 2019). With LEO-based space systems already offering a wide range of services, satellite developers are focused on new satellite missions with a growing need for even better POD accuracy levels (Prol et al. 2022).
Dynamic techniques can be challenging to fit the requirements of satellite missions because it relies on external products which do not represent the real perturbation environment. Most of the studies that implemented dynamic POD obtained lower accuracy due to this issue (Chiaradia et al. 2003, 2013; Choi et al. 2010a; Feng 2000; Zandbergen et al. 2003). The lower accuracies were also observed for studies that implemented real-time processing, including limitations due to the accuracy of GNSS satellite orbits and clocks, broadcast ephemeris and GNSS receiver capabilities.
The uninterrupted geometric information offered by the GNSS data drove the emergence of the kinematic method. It is independent of any prior mechanical model such as gravitation field, atmospheric drag and solar radiation pressure. It requires no prior knowledge of spacecraft motion and relies fully on GNSS observations. With this, centimetric accuracies can be observed. However, the limitation here is the error/gaps in the GNSS measurements and observations. When this is the case, the accuracies observed are lower when compared to the dynamic POD technique, as seen in the document “Supplement 2”.
With the limitation of dynamic and kinematic techniques, the use of both the geometric information and the information of the satellite motion has improved the POD accuracy. This led to the emergence of the reduced-dynamic model. Reduced-dynamic model by adjusting the weight of the information derived from the geometric and orbit dynamic improves the orbit quality. It also absorbs the force model errors by estimating pseudo-stochastic parameters. This technique was implemented by most of the studies used in this review (see Fig. 3) and fits to the requirements of several satellite missions. It shows the most accurate orbits when compared to dynamic and kinematic, as illustrated in Fig. 5.
In general, from the selected studies, we could observe that the LEO satellites with lower altitudes (less than 600 km) have an average worse accuracy than higher altitudes (greater than 600 km). This is expected as the higher orbits require simplified force models. However, there are several cases where the accuracy of LEO satellites below 600 km had accuracies better than 10 cm. The analysis shows that proper force modeling, such as estimating the drag parameter using a shorter interval, can produce a high-precision orbit result even for low-altitude LEO satellites. This has been seen in many low-altitude LEO missions, such as Swarm (Van Den Ijssel et al. 2015). Ambiguity resolution (AR) also plays a major role in GPS-based POD accuracy. The studies show that the ambiguity-fixed POD solution provides higher accuracy, around 15–27% precision improvement, compared to the ambiguity-float solution (Li et al. 2019b; Montenbruck et al. 2018b; Yang et al. 2015). With respect to observations, UD-based solution reached a median accuracy of 6 cm compared to DD and TD accuracy of 2.5 and 2.4 cm, respectively, as seen in Fig. 8. However, some of the studies showed that using UD observations for POD can obtain better accuracy of 1 cm (3D-RMS) when highly accurate techniques are used (Montenbruck et al. 2018b, c). Similarly, observations using SLR have a median accuracy of 9 cm. However, Noomen (2001) implemented a POD technique using SLR which can obtain an accuracy of less than 1 cm (radial). Overall, the POD strategies for the highest accuracies, less than or equal to a centimeter-level (3D-RMS), and various factors driving them are summarized in Table 4.
Limitations of the review
A limitation of this review is that only 111 out of the 137 primary studies performed a validation of the results for their implemented POD. Moreover, while performing POD, each primary study used different experimental settings, including datasets, POD methods, algorithms, software and data pre-processing methods. Although we have exhaustively searched all the stated digital search libraries, there might still be a possibility that a study suitable for this review may have been left out. While performing this review, we assumed that all the studies being examined are impartial; thus, when this is not the case, it may pose a threat to this study.
Conclusion and future guidelines
This systematic review investigated POD of LEO satellites aiming to provide an understanding of the various methods applied for POD of LEO satellites to developers of small satellites and new researchers in the field. Our investigation has shown that several data sources, POD techniques and validation methods with different accuracy levels have been extensively studied and evaluated in the last years. To ensure that our systematic review is valuable, four main research questions were defined. The main findings can be summarized as follows.
RQ1 (Which data sources have been used for LEO–POD?): High-quality datasets have been used in estimating and validating the POD for LEO satellites. This review has revealed that most of the datasets used for POD estimation are GNSS data, implying that fewer studies used non-GNSS and hybrid data. The GNSS systems used by most of the primary studies include GPS, BeiDou, Galileo and their combinations. Only one study used simulated GLONASS (Hauschild and Montenbruck 2021).
RQ2 (Which POD techniques have been used?): Among the POD models, algorithms, methods and software that have been applied in estimating the POD for LEO satellites, a clear trend was observed for techniques using reduced-dynamic model, least-squares solvers, dual-frequency (DF) signals with undifferenced (UD) phase and code observations in post-processing mode. This is a very prominent method used for precise orbit determination of LEO satellites since it offers reasonable accuracy without extensive complexity. Researchers are encouraged to conduct more studies making use of rarely used POD methods to strengthen the evidence on their performance further. The highlighted methods in a few of the studies are the GNSS techniques using single-frequency receivers, broadcast ephemeris, real-time products and DORIS and SLR systems.
RQ3 (Which kind of validation methods has been used?): Regarding validation, it has been seen that most of the primary studies made use of SLR data. A few studies, however, have validated the SLR data itself. Overall, the GNSS and DORIS techniques produced 2.4 cm and 7.7 cm median accuracy in 3D-RMS (1-sigma), respectively, while SLR-based POD techniques have provided an accuracy of 9 cm. Although some studies achieved an accuracy of up to 1 cm in the radial direction for both DORIS and SLR, researchers are encouraged to conduct more studies for a proper performance evaluation of the SLR-based POD techniques.
RQ4 (What accuracy levels have been obtained?): We have identified that the most prominent POD techniques allow an orbit determination within a few centimeters of accuracy. This accuracy was obtained in distinct studies conducted by different authors and institutes, revealing the POD as a well-established field. Overall, the techniques used most in the primary studies are primarily aligned with the techniques performing the best, except for the type of observation used. The DDs often offer the best accuracy; however, UD observations are more usual. We justify this difference due to the higher complexity of the POD techniques when using DDs, requiring multiple GNSS receivers from the user side. The accuracy obtained by several methods is in accordance with the satellite mission requirements, and future improvements may still be needed to meet the requirements of upcoming LEO–PNT satellites.
As for the implications for practitioners, this review found that none of the primary studies focused on industry practice. This evidence may imply that there is limited cooperation between research and industry in the application of POD algorithms/techniques. Most often, the degree of match between the estimation contexts and the characteristics of the chosen POD algorithm/technique directly and significantly impacts the performance of the POD estimation accuracy. In making any decision on the type of POD algorithm/technique being used, practitioners need to be aware of the estimation contexts (orbit accuracy requirement) and understand the characteristics of the candidate POD algorithm/technique. Therefore, we suggest that the LEO industry should cooperate with researchers to investigate promising POD algorithms/techniques considering real cases of contexts and requirements. In our future studies, we plan to address the issue of cost/budget for POD estimation of a satellite mission. This is because the studies used for this review were scientific and did not address the issue of cost or budget in their research.
References
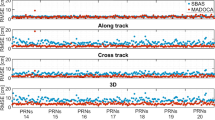
Allahvirdi-Zadeh A, Wang K, El-Mowafy A (2021a) POD of small LEO satellites based on precise real-time MADOCA and SBAS-aided PPP corrections. GPS Solut 25(2):1–14. https://doi.org/10.1007/S10291-020-01078-8/FIGURES/12
Allahvirdi-Zadeh A, Wang K, El-Mowafy A (2021b) Precise orbit determination of LEO satellites based on undifferenced GNSS observations. J Surv Eng 148(1):03121001. https://doi.org/10.1061/(ASCE)SU.1943-5428.0000382
Allende-Alba G, Montenbruck O (2016) Robust and precise baseline determination of distributed spacecraft in LEO. Adv Space Res 57(1):46–63. https://doi.org/10.1016/J.ASR.2015.09.034
Allende-Alba G, Montenbruck O, Ardaens JS, Wermuth M, Hugentobler U (2017a) Estimating maneuvers for precise relative orbit determination using GPS. Adv Space Res 59(1):45–62. https://doi.org/10.1016/J.ASR.2016.08.039
Allende-Alba G, Montenbruck O, Jäggi A, Arnold D, Zangerl F (2017b) Reduced-dynamic and kinematic baseline determination for the Swarm mission. GPS Solut 21(3):1275–1284. https://doi.org/10.1007/S10291-017-0611-Z/FIGURES/10
Bertiger W, Desai SD, Dorsey A, Haines BJ, Harvey N, Kuang D, Sibthorpe A, Weiss JP (2010). Sub-Centimeter precision orbit determination with GPS for ocean altimetry, 33(S1), 363–378. https://doi.org/10.1080/01490419.2010.487800
Bock H, Jäggi A, Švehla D, Beutler G, Hugentobler U, Visser P (2007) Precise orbit determination for the GOCE satellite using GPS. Adv Space Res 39(10):1638–1647. https://doi.org/10.1016/J.ASR.2007.02.053
Bock H, Jäggi A, Dach R, Schaer S, Beutler G (2009) GPS single-frequency orbit determination for low Earth orbiting satellites. Adv Space Res 43(5):783–791. https://doi.org/10.1016/J.ASR.2008.12.003
Bock H, Jäggi A, Beutler G, Meyer U (2014) GOCE: precise orbit determination for the entire mission. J Geod 88(11):1047–1060. https://doi.org/10.1007/S00190-014-0742-8/TABLES/6
Bock H, Jäggi A, Meyer U, Visser P, den den Ijssel J, van Helleputte T, Heinze M, Hugentobler U (2011) GPS-derived orbits for the GOCE satellite. J Geod 85(11):807–818. https://doi.org/10.1007/S00190-011-0484-9
Borthomieu Y (2014) Satellite lithium-ion batteries. Lithium-Ion Batt Adv Appl 2546:311–344. https://doi.org/10.1016/B978-0-444-59513-3.00014-5
Bruce H, Bertiger W, Desal S, Kuang D, Munson T, Young L, Willis P (2003) Initial orbit determination results for jason-1: towards a 1 cm Orbit. Navigation 50(3):171–180. https://doi.org/10.1002/J.2161-4296.2003.TB00327.X
Bruinsma S, Loyer S, Lemoine JM, Perosanz F, Tamagnan D (2003) The impact of accelerometry on CHAMP orbit determination. J Geod 77(1):86–93. https://doi.org/10.1007/S00190-002-0304-3
Byun SH (2003) Satellite orbit determination using triple-differenced GPS carrier phase in pure kinematic mode. J Geod 76(9):569–585. https://doi.org/10.1007/S00190-002-0279-0
Calman J, Manzi LP (1989). Real-time satellite altimetry. John Hopkins APL Technical Digest, 10(4).
Casotto S, Gini F, Panzetta F, Bardella M (2013) Fully dynamic approach for GOCE precise orbit determination. Bollettino Di Geofisica Teorica Ed Applicata 54(4):367–384. https://doi.org/10.4430/BGTA0108
Chen P, Zhang J, Sun X (2017) Real-time kinematic positioning of LEO satellites using a single-frequency GPS receiver. GPS Solut 21(3):973–984. https://doi.org/10.1007/S10291-016-0586-1/TABLES/4
Chiaradia APM, Kuga HK, Prado AFBA (2003) Single frequency GPS measurements in real-time artificial satellite orbit determination. Acta Astronaut 53(2):123–133. https://doi.org/10.1016/S0094-5765(02)00198-4
Chiaradia APM, Kuga HK, Prado AFBDA (2013) Onboard and real-time artificial satellite orbit determination using GPS. Math Prob Eng. https://doi.org/10.1155/2013/530516
Choi JY, Lee SJ (2011) Precision assessment of near real time precise orbit determination for low earth orbiter. J Astron Space Sci 28(1):55–62. https://doi.org/10.5140/JASS.2011.28.1.055
Choi EJ, Yoon JC, Lee BS, Park SY, Choi KH (2010a) Onboard orbit determination using GPS observations based on the unscented Kalman filter. Adv Space Res 46(11):1440–1450. https://doi.org/10.1016/J.ASR.2010.07.022
Choi KR, Ries JC, Tapley BD (2010b) Jason-1 precision orbit determination by combining SLR and DORIS with GPS tracking data. Marine Geod 27(1–2):319–331. https://doi.org/10.1080/01490410490465652
Chung L, Nicholson A, Good S, Woodard M (2012) LandSat data continuity mission (LDCM) orbit determination. Int Symp Space Flight Dyn. https://www.researchgate.net/publication/235992647_LANDSAT_DATA_CONTINUITY_MISSION_LDCM_ORBIT_DETERMINATION
Colombo OL, Luthcke SB (2004) Kinematic point positioning of a LEO with simultaneous reduced-dynamic orbit estimation. Proc. ION GNSS 2004, Institute of Navigation, Long Beach, CA, September 21–24. 2667–2675. https://www.ion.org/publications/abstract.cfm?articleID=5950
D’Amico S, Ardaens JS, Larsson R (2012). Spaceborne autonomous formation-flying experiment on the PRISMA Mission. 35(3), 834–850. https://doi.org/10.2514/1.55638
Dong-Ju P, Bin W (2012a) The application of GIM in precise orbit determination for LEO satellites with single-frequency GPS measurements. Chin Astron Astrophy 36(4):366–381. https://doi.org/10.1016/J.CHINASTRON.2012.10.002
Dong-Ju P, Bin WU (2012b) Kinematic precise orbit determination for LEO satellites using space-borne dual-frequency GPS measurements. Chin Astron Astrophy 36(3):291–306. https://doi.org/10.1016/J.CHINASTRON.2012.07.006
Doornbos E, Scharroo R (2005) Improved ERS and Envisat precise orbit determination. European Space Agency. https://adsabs.harvard.edu/pdf/2005ESASP.572E..64D
Dybå T, Dingsøyr T (2008) Empirical studies of agile software development: a systematic review. Inf Softw Technol 50(9–10):833–859. https://doi.org/10.1016/J.INFSOF.2008.01.006
Enderle W, Gini F, Schönemann E, Mayer V, Otten M (2019) Proba-3 precise orbit determination based on GNSS observations. Proc. ION GNSS+ 2019, institute of navigation, Miami, Florida, September 2019, pp. 1187–1198.
Erdogan E, Karslioglu MO (2009) Near real time orbit determination of BILSAT-1. RAST 2009 - Proceedings of 4th international conference on recent advances space technologies, 648–653. https://doi.org/10.1109/RAST.2009.5158271
ESA (2021) Satellite Parameters for POD - Sentinel Online. The European Space Agency. https://sentinels.copernicus.eu/web/sentinel/technical-guides/sentinel-1-sar/pod/satellite-parameters
Feng Y (2000) Efficient orbit integrator/filter for GPS-based precise LEO autonomous navigation. Record - IEEE PLANS, position location and navigation symposium, 317–324. https://doi.org/10.1109/PLANS.2000.838320
Flohrer C, Otten M, Springer T, Dow J (2011) Generating precise and homogeneous orbits for Jason-1 and Jason-2. Adv Space Res 48(1):152–172. https://doi.org/10.1016/J.ASR.2011.02.017
Förste C, Bruinsma S, Shako R, Marty J-C, Flechtner F, Abrykosov O, Dahle C, Lemoine J-M, Neumayer K-H, Biancale R (2011). EIGEN-6 – A new combined global gravity field model including GOCE data from the collaboration of GFZ Potsdam and GRGS Toulouse. General Assembly European Geosciences Union (Vienna, Austria 2011). https://gfzpublic.gfz-potsdam.de/pubman/faces/ViewItemOverviewPage.jsp?itemId=item_243691
Gao F, Peng B, Zhang Y, Evariste NH, Liu J, Wang X, Zhong M, Lin M, Wang N, Chen R, Xu H (2015) Analysis of HY2A precise orbit determination using DORIS. Adv Space Res 55(5):1394–1404. https://doi.org/10.1016/J.ASR.2014.11.032
Gebre-Egziabher D, Gleason S (2009). GNSS applications and methods. Artech House, Boston, London. https://books.google.fi/books?hl=en&lr=&id=juXAE3SHQroC&oi=fnd&pg=PR15&dq=gnss+applications+and+methods&ots=nYqkibqFHM&sig=FeucKENKp2vGy758AgzIL4qlnAQ&redir_esc=y#v=onepage&q=gnss%20applications%20and%20methods&f=false
Gill E, Montenbruck O, Arichandran K, Tan SH, Bretschneider T (2004). (PDF) High-precision onboard orbit determination for small satellites - The GPS-based XNS on X-SAT. Conference: Symposium on Small Satellites Systems & Services. https://www.researchgate.net/publication/234269518_High-precision_onboard_orbit_determination_for_small_satellites_-_The_GPS-based_XNS_on_X-SAT
Gomes VM, Kuga HK, Chiaradia APM (2007) Real time orbit determination using GPS navigation solution. J Braz Soc Mech Sci Eng 29(3):274–278. https://doi.org/10.1590/S1678-58782007000300006
Gong X, Guo L, Wang F, Zhang W, Sang J, Ge M, Schuh H (2019) Precise onboard real-time orbit determination with a low-cost single-frequency GPS/BDS receiver. Remote Sens 11(11):1391. https://doi.org/10.3390/RS11111391
Gong X, Sang J, Wang F, Li X (2020) LEO onboard real-time orbit determination using GPS/BDS data with an optimal stochastic model. Remote Sens 12(20):3458. https://doi.org/10.3390/RS12203458
Gu D, Ju B, Liu J, Tu J (2017a) Enhanced GPS-based GRACE baseline determination by using a new strategy for ambiguity resolution and relative phase center variation corrections. Acta Astronaut 138:176–184. https://doi.org/10.1016/J.ACTAASTRO.2017.05.022
Gu D, Liu Y, Yi B, Cao J, Li X (2017b) In-flight performance analysis of MEMS GPS receiver and its application to precise orbit determination of APOD-A satellite. Adv Space Res 60(12):2723–2732. https://doi.org/10.1016/J.ASR.2017.08.023
Guo JY, Qin J, Kong QL, Li GW (2012) On simulation of precise orbit determination of HY-2 with centimeter precision based on satellite-borne GPS technique. Appl Geophys 9(1):95–107. https://doi.org/10.1007/S11770-012-0319-3
Guo J, Kong Q, Qin J, Sun Y (2013) On precise orbit determination of HY-2 with space geodetic techniques. Acta Geophy 61(3):752–772. https://doi.org/10.2478/S11600-012-0095-8
Guo J, le Zhao Q, Guo X, Liu XL, Liu JN, Zhou Q (2014) Quality assessment of onboard GPS receiver and its combination with DORIS and SLR for Haiyang 2A precise orbit determination. Sci China Earth Sci 58(1):138–150. https://doi.org/10.1007/S11430-014-4943-Z
Hackel S, Montenbruck O, Steigenberger P, Balss U, Gisinger C, Eineder M (2017) Model improvements and validation of TerraSAR-X precise orbit determination. J Geod 91(5):547–562. https://doi.org/10.1007/S00190-016-0982-X/TABLES/7
Hackel S, Gisinger C, Balss U, Wermuth M, Montenbruck O (2018) Long-term validation of TerraSAR-X and TanDEM-X orbit solutions with laser and radar measurements. Remote Sens 10(5):762. https://doi.org/10.3390/RS10050762
Haines B, Bar-Sever Y, Bertiger W, Desai S, Willis P (2010) One-centimeter orbit determination for jason-1: new GPS-based strategies. Marine Geod 27(1–2):299–318. https://doi.org/10.1080/01490410490465300
Haines BJ, Almatys MJ, Bar-Sever YE, Bertiger WI, Desai SD, Dorsey AR, Lane CM, Weiss JP (2011) One-centimeter orbits in near-real time: the GPS experience on OSTM/Jason-24. J Astronaut Sci 58(3):445–459. https://doi.org/10.1007/BF03321179/METRICS
Hauschild A, Montenbruck O (2021) Precise real-time navigation of LEO satellites using GNSS broadcast ephemerides. Navigation 68(2):419–432. https://doi.org/10.1002/NAVI.416
Hong S, Choi Y, Park I, Sohn HG (2017) Comparison of orbit-based and time-offset-based geometric correction models for SAR satellite imagery based on error simulation. Sensors (basel, Switzerland). https://doi.org/10.3390/S17010170
Hwang Y, Lee BS, Kim H, Kim J (2011a) Orbit determination performances using single- and double-differenced methods: SAC-C and KOMPSAT-2. Adv Space Res 47(1):138–148. https://doi.org/10.1016/J.ASR.2010.07.027
Hwang Y, Lee BS, Kim YR, Roh KM, Jung OC, Kim H (2011b) GPS-based orbit determination for KOMPSAT-5 satellite. ETRI J 33(4):487–496. https://doi.org/10.4218/ETRIJ.11.1610.0048
Hwang C, Tseng T-P, Lin T, Švehla D, Schreiner B (2008) Precise orbit determination for the FORMOSAT-3/COSMIC satellite mission using GPS. J Geod 83(5):477–489. https://doi.org/10.1007/S00190-008-0256-3
ICEYE (2022) SAR imagery products, SAR Data. Made for Change Detection. https://www.iceye.com/sar-imagery
Innerkofler J, Kirchengast G, Schwärz M, Pock C, Jäggi A, Andres Y, Marquardt C (2020) Precise orbit determination for climate applications of GNSS radio occultation including uncertainty estimation. Remote Sens 12(7):1180. https://doi.org/10.3390/RS12071180
Jäggi A, Beutler G, Hugentobler U (2005) Reduced-dynamic orbit determination and the use of accelerometer data. Adv Space Res 36(3):438–444. https://doi.org/10.1016/J.ASR.2004.11.028
Jäggi A, Hugentobler U, Bock H, Beutler G (2007) Precise orbit determination for GRACE using undifferenced or doubly differenced GPS data. Adv Space Res 39(10):1612–1619. https://doi.org/10.1016/J.ASR.2007.03.012
Jäggi A, Hugentobler U, Beutler G (2006) Pseudo-stochastic orbit modeling techniques for Low-Earth Orbiters. J Geod 80(1):47–60. https://doi.org/10.1007/S00190-006-0029-9
Jayles C, Chauveau JP, Rozo F (2010) DORIS/Jason-2: better than 10 cm on-board orbits available for near-real-time altimetry. Adv Space Res 46(12):1497–1512. https://doi.org/10.1016/J.ASR.2010.04.030
Jianfeng C, Haijun M, Xie L, Geshi T, Shushi L (2017) The application of MEMS GPS receiver in APOD precise orbit determination. 2017 forum on cooperative positioning and service, CPGPS 2017, 140–143. https://doi.org/10.1109/CPGPS.2017.8075112
Ju B, Gu D, Herring TA, Allende-Alba G, Montenbruck O, Wang Z (2017) Precise orbit and baseline determination for maneuvering low earth orbiters. GPS Solut 21(1):53–64. https://doi.org/10.1007/S10291-015-0505-X/FIGURES/11
Kang Z, Nagel P, Pastor R (2003) Precise orbit determination for GRACE. Adv Space Res 31(8):1875–1881. https://doi.org/10.1016/S0273-1177(03)00159-5
Kang Z, Tapley B, Bettadpur S, Ries J, Nagel P (2006) Precise orbit determination for GRACE using accelerometer data. Adv Space Res 38(9):2131–2136. https://doi.org/10.1016/J.ASR.2006.02.021
Kang Z, Bettadpur S, Nagel P, Save H, Poole S, Pie N (2020) GRACE-FO precise orbit determination and gravity recovery. J Geod 94(9):1–17. https://doi.org/10.1007/S00190-020-01414-3/FIGURES/14
Kang Z et al (2006) Precise orbit determination for the GRACE mission using only GPS data. J Geod 80(6):322–331. https://doi.org/10.1007/S00190-006-0073-5
Kim J-H, Park S-Y, Kim Y-R, Park E-S, Jo JH, Lim H-C, Park J-H, Park J-U (2011) Analysis of scaling parameters of the batch unscented transformation for precision orbit determination using satellite laser ranging data. J Astron Space Sci 28(3):183–192. https://doi.org/10.5140/JASS.2011.28.3.183
Kim YR, Park E, Choi EJ, Park SY, Park C, Lim HC (2014) Precise orbit determination using the batch filter based on particle filtering with genetic resampling approach. Adv Space Res 54(6):998–1007. https://doi.org/10.1016/J.ASR.2014.06.001
Kim YR, Park E, Kucharski D, Lim HC, Kim B (2016) The challenge of precise orbit determination for STSAT-2C using extremely sparse SLR data. Adv Space Res 57(5):1159–1176. https://doi.org/10.1016/J.ASR.2015.12.031
Kitchenham B (2004) Procedures for performing systematic reviews. NICTA Tech Rep 0400011T.1.
Kong Q, Guo J, Hwang C, Gao F, Lin H, Zhao C (2014) Precise orbit determination and accuracy analysis of HY-2A satellite using DORIS Doppler data. Acta Geod Geoph 49(4):455–470. https://doi.org/10.1007/S40328-014-0066-4/FIGURES/12
Kong Q, Guo J, Sun Y, Zhao C, Chen C (2017) Centimeter-level precise orbit determination for the HY-2A satellite using DORIS and SLR tracking data. Acta Geophys 65(1):1–12. https://doi.org/10.1007/S11600-016-0001-X/FIGURES/5
Kong Q, Gao F, Guo J, Han L, Zhang L, Shen Y (2018) Analysis of precise orbit predictions for a HY-2A satellite with three atmospheric density models based on dynamic method. Remote Sens 11(1):40. https://doi.org/10.3390/RS11010040
König R, Zhu S, Reigber C, Neumayer KH, Meixner H, Galas R, Baustert G, Schwintzer P (2002) CHAMP rapid orbit determination for GPS atmospheric limb sounding. Adv Space Res 30(2):289–293. https://doi.org/10.1016/S0273-1177(02)00297-1
Kuang D, Bar-Sever Y, Bertiger W, Desai S, Haines B, Iijima B, Kruizinga G, Meehan T, Romans L (2001). Precise orbit determination for CHAMP using GPS data from blackjack receiver. Proc. ION NTM 2001, institute of navigation, Long Beach, CA, USA, January 22 - 24, 762–770. https://www.ion.org/publications/abstract.cfm?articleID=188
Lee BS, Yoon JC, Hwang Y, Kim J (2005) Orbit determination system for the KOMPSAT-2 using GPS measurement data. Acta Astronaut 57(9):747–753. https://doi.org/10.1016/J.ACTAASTRO.2005.03.066
Lemoine FG, Zelensky N, Chinn D, Pavlis D, Rowlands D, Beckley B, Luthcke S, Willis P, Ziebart M, Sibthorpe A, Boy J, Luceri V (2010) Towards development of a consistent orbit series for TOPEX. Adv Space Res. https://doi.org/10.1016/j.asr.2010.05.007
Leung S, Montenbruck O (2012) Real-time navigation of formation-flying spacecraft using global-positioning-system measurements. J Guid Control Dyn 28(2):226–235. https://doi.org/10.2514/1.7474
Li X, Zhang K, Zhang Q, Zhang W, Yuan Y, Li X (2018b) Integrated orbit determination of FengYun-3C, BDS, and GPS satellites. J Geophys Res: Solid Earth 123(9):8143–8160. https://doi.org/10.1029/2018JB015481
Li X, Zhang K, Meng X, Zhang W, Zhang Q, Zhang X, Li X (2020) Precise orbit determination for the FY-3C satellite using onboard BDS and GPS observations from 2013, 2015, and 2017. Engineering 6(8):904–912. https://doi.org/10.1016/J.ENG.2019.09.001
Li JC, Zhang SJ, Zou XC, Jiang WP (2009) Precise orbit determination for GRACE with zero-difference kinematic method. Chin Sci Bull 55(7):600–606. https://doi.org/10.1007/S11434-009-0286-0
Li K, Zhou X, Wang W, Gao Y, Zhao G, Tao E, Xu K (2018a) Centimeter-level orbit determination for TG02 spacelab using onboard GNSS data. Sensors 18(8):2671. https://doi.org/10.3390/S18082671
Li X, Jiang Z, Ma F, Lv H, Yuan Y, Li X (2019a) LEO precise orbit determination with Inter-satellite Links. Remote Sens 11(18):2117. https://doi.org/10.3390/RS11182117
Li X, Wu J, Zhang K, Li X, Xiong Y, Zhang Q (2019b) Real-time kinematic precise orbit determination for LEO satellites using zero-differenced ambiguity resolution. Remote Sens 11(23):2815. https://doi.org/10.3390/RS11232815
Luthcke SB, Zelensky NP, Rowlands DD, Lemoine FG, Williams TA (2010) The 1-centimeter orbit: jason-1 precision orbit determination using GPS, SLR, DORIS, and altimeter data special issue: jason-1 calibration/validation. Mar Geodesy 26(3–4):399–421. https://doi.org/10.1080/714044529
Mahajan B, Pernicka HJ, Balakrishnan SN (2013) Orbit determination of an uncooperative maneuvering RSO during proximity operations. 51st AIAA aerospace sciences meeting including the new horizons forum and aerospace exposition 2013. https://doi.org/10.2514/6.2013-130
Mander A, Bisnath S (2013) GPS-based precise orbit determination of Low Earth Orbiters with limited resources. GPS Solut 17(4):587–594. https://doi.org/10.1007/S10291-012-0303-7/TABLES/3
Mao X, Visser PNAM, van den Ijssel J (2018) The impact of GPS receiver modifications and ionospheric activity on Swarm baseline determination. Acta Astronaut 146:399–408. https://doi.org/10.1016/J.ACTAASTRO.2018.03.009
Mao X, Visser PNAM, van den Ijssel J (2019) Absolute and relative orbit determination for the CHAMP/GRACE constellation. Adv Space Res 63(12):3816–3834. https://doi.org/10.1016/J.ASR.2019.02.030
Mao X, Arnold D, Girardin V, Villiger A, Jäggi A (2021) Dynamic GPS-based LEO orbit determination with 1 cm precision using the Bernese GNSS Software. Adv Space Res 67(2):788–805. https://doi.org/10.1016/J.ASR.2020.10.012
Montenbruck O, Ramos-Bosch P (2008) Precision real-time navigation of LEO satellites using global positioning system measurements. GPS Solut 12(3):187–198. https://doi.org/10.1007/S10291-007-0080-X/TABLES/6
Montenbruck O, Gill E, Lutze F (2002) Satellite orbits: models, methods, and applications. Appl Mech Rev 55(2):B27–B28. https://doi.org/10.1115/1.1451162
Montenbruck O, Gill E, Kroes R (2005a) Rapid orbit determination of LEO satellites using IGS clock and ephemeris products. GPS Solut 9(3):226–235. https://doi.org/10.1007/S10291-005-0131-0/TABLES/3
Montenbruck O, van Helleputte T, Kroes R, Gill E (2005b) Reduced dynamic orbit determination using GPS code and carrier measurements. Aerosp Sci Technol 9(3):261–271. https://doi.org/10.1016/J.AST.2005.01.003
Montenbruck O, Andres Y, Bock H, van Helleputte T, van den Ijssel J, Loiselet M, Marquardt C, Silvestrin P, Visser P, Yoon Y (2008) Tracking and orbit determination performance of the GRAS instrument on MetOp-A. GPS Solut 12(4):289–299. https://doi.org/10.1007/S10291-008-0091-2/FIGURES/10
Montenbruck O, Swatschina P, Markgraf M, Santandrea S, Naudet J, Tilmans E (2012) Precision spacecraft navigation using a low-cost GPS receiver. GPS Solut 16(4):519–529. https://doi.org/10.1007/S10291-011-0252-6/TABLES/3
Montenbruck O, Hauschild A, Andres Y, von Engeln A, Marquardt C (2013) (Near-) real-time orbit determination for GNSS radio occultation processing. GPS Solut 17(2):199–209. https://doi.org/10.1007/S10291-012-0271-Y/FIGURES/5
Montenbruck O, Allende-Alba G, Rosello J, Tossaint M, Zangerl F (2018a) Precise orbit and baseline determination for the SAOCOM-CS bistatic radar mission. Navigation 65(1):15–24. https://doi.org/10.1002/NAVI.216
Montenbruck O, Hackel S, Jäggi A (2018b) Precise orbit determination of the Sentinel-3A altimetry satellite using ambiguity-fixed GPS carrier phase observations. J Geodesy 92(7):711–726. https://doi.org/10.1007/S00190-017-1090-2/TABLES/5
Montenbruck O, Hackel S, van den Ijssel J, Arnold D (2018c) Reduced dynamic and kinematic precise orbit determination for the Swarm mission from 4 years of GPS tracking. GPS Solut 22(3):1–11. https://doi.org/10.1007/S10291-018-0746-6/FIGURES/7
Montenbruck O, Kunzi F, Hauschild A (2022) Performance assessment of GNSS-based real-time navigation for the Sentinel-6 spacecraft. GPS Solut 26(1):1–11. https://doi.org/10.1007/S10291-021-01198-9/FIGURES/4
Moon Y, Koenig R, Michalak G, Rothacher M (2008) Precise orbit and baseline determination for TerraSAR-X and TanDEM-X. Int Geosci Remote Sens Symp (IGARSS) 2(1):121–124. https://doi.org/10.1109/IGARSS.2008.4778942
Mur TJM, Dow JM (1997). Satellite navigation using GPS. European Space Agency. https://www.esa.int/esapub/bulletin/bullet90/b90ESA.htm
Murata M, Kawano I, Inoue K (2020) Precision onboard navigation for LEO Satellite based on precise point positioning. 2020 IEEE/ION Position Location Navig Symp, PLANS 2020:1506–1513. https://doi.org/10.1109/PLANS46316.2020.9110158
Nakamura R, Nakamura S, Kudo N, Katagiri S (2007). Precise orbit determination for ALOS. Proceedings of the 20th international symposium on space flight dynamics.
Nerem RS, Lerch FJ, Marshall JA, Pavlis EC, Putney BH, Tapley BD, Eanes RJ, Ries JC, Schutz BE, Shum CK, Watkins MM, Klosko SM, Chan JC, Luthcke SB, Patel GB, Pavlis NK, Williamson RG, Rapp RH, Biancale R, Nouel F (1994) Gravity model development for TOPEX/POSEIDON: joint gravity models 1 and 2. J Geophys Res Oceans 99(C12):24421–24447. https://doi.org/10.1029/94JC01376
Noomen R (2001) Precise orbit determination with SLR: setting the standard. Surv Geophys 22(5–6):473–480. https://doi.org/10.1023/A:1015668100892/METRICS
Page MJ et al (2021) The PRISMA 2020 statement: an updated guideline for reporting systematic reviews. Syst Rev 10(1):1–11. https://doi.org/10.1186/S13643-021-01626-4/FIGURES/1
Pail R, Bruinsma S, Migliaccio F, Förste C, Goiginger H, Schuh WD, Höck E, Reguzzoni M, Brockmann JM, Abrikosov O, Veicherts M, Fecher T, Mayrhofer R, Krasbutter I, Sansò F, Tscherning CC (2011) First GOCE gravity field models derived by three different approaches. J Geodesy 85(11):819–843. https://doi.org/10.1007/S00190-011-0467-X/METRICS
Peng DJ, Wu B (2009) Precise orbit determination for Jason-1 satellite using on-board GPS data with cm-level accuracy. Chin Sci Bull 54(2):196–202. https://doi.org/10.1007/S11434-008-0513-0
Peng H, Lin M, Wang X, Zou J (2018) HY-2A satellite precise orbit determination methods and validation. Int Geosci Remote Sens Symp (IGARSS). https://doi.org/10.1109/IGARSS.2018.8518749
Peng D, Wu B (2007) Zero-difference and single-difference precise orbit determination for LEO using GPS. Chin Sci Bull 52(15):2024–2030. https://doi.org/10.1007/S11434-007-0264-3
Peng DJ, Wu B (2008) Application of accelerometer data in precise orbit determination of GRACE -A and -B. Chin J Astron Astrophys 8(5):603. https://doi.org/10.1088/1009-9271/8/5/11
Peterson KM (2003) Satellite communications. Encycl Phys Sci Technol. https://doi.org/10.1016/B0-12-227410-5/00673-6
Prol FS, Ferre RM, Saleem Z, Valisuo P, Pinell C, Lohan ES, Elsanhoury M, Elmusrati M, Islam S, Celikbilek K, Selvan K, Yliaho J, Rutledge K, Ojala A, Ferranti L, Praks J, Bhuiyan MZH, Kaasalainen S, Kuusniemi H (2022) Position, navigation, and timing (PNT) through low earth orbit (LEO) satellites: a survey on current status, challenges, and opportunities. IEEE Access 10:83971–84002. https://doi.org/10.1109/ACCESS.2022.3194050
Qi L, Guo J, Xia Y, Yang Z (2021) Effect of higher-order ionospheric delay on precise orbit determination of GRACE-FO based on satellite-borne GPS technique. IEEE Access 9:29841–29849. https://doi.org/10.1109/ACCESS.2021.3059296
Qile Z, Jingnan L, Maorong G, Zhao Q, Liu J, Ge M (2012) High precision orbit determination of CHAMP satellite. Geo-Spatial Inform Sci 9(3):180–186. https://doi.org/10.1007/BF02826764
Qing Y, Lin J, Liu Y, Dai X, Lou Y, Gu S (2020) Precise orbit determination of the China Seismo-Electromagnetic satellite (CSES) using onboard GPS and BDS observations. Remote Sens 12(19):3234. https://doi.org/10.3390/RS12193234
Reichert A, Meehan T, Munson T (2002) Toward decimeter-level real-time orbit determination: a demonstration using the SAC-C and CHAMP spacecraft. Proc. ION GPS 2002, institute of navigation, Portland, OR, September 24–27, 1996–2003. https://www.ion.org/publications/abstract.cfm?articleID=2218
Romero I, Boomkamp H, Dow J, Garcia C (2003) GPS orbit processing in support of low earth orbiter precise orbit determination. Adv Space Res 31(8):1911–1916. https://doi.org/10.1016/S0273-1177(03)00163-7
Sakamoto Y, Nishio M (2011) Orbit determination using radio interferometer of small-diameter antennas for LEO satellites. IEEE Trans Aerosp Electron Syst 47(3):2111–2118. https://doi.org/10.1109/TAES.2011.5937286
Schrama E (2018) Precision orbit determination performance for CryoSat-2. Adv Space Res 61(1):235–247. https://doi.org/10.1016/J.ASR.2017.11.001
Schutz BBSSN and SM (2008). Precision Orbit and attitude determination for ICESAT. Advances in the Astronautical Sciences. https://www.researchgate.net/publication/265476972
Selvan K, Siemuri A, Kuusniemi H, Välisuo P (2021) A review on precise orbit determination of various LEO satellites. ICL-GNSS 2021 WiP Proceedings, Tampere Finland. https://www.ion.org/
Shao K, Gu D, Ju B, Wang W, Wei C, Duan X, Wang Z (2020) Analysis of Tiangong-2 orbit determination and prediction using onboard dual-frequency GNSS data. GPS Solut 24(1):1–13. https://doi.org/10.1007/S10291-019-0927-Y/FIGURES/16
Sun X, Han C, Chen P (2017) Precise real-time navigation of LEO satellites using a single-frequency GPS receiver and ultra-rapid ephemerides. Aerosp Sci Technol 67:228–236. https://doi.org/10.1016/J.AST.2017.04.006
Svehla Ď, Rothacher M (2003) Kinematic and reduced-dynamic precise orbit determination of low earth orbiters. Adv Geosci 1:47–56
Švehla D, Rothacher M (2003) CHAMP double-difference kinematic POD with ambiguity resolution. First CHAMP Mission Results Gravity Magn Atmos Stud. https://doi.org/10.1007/978-3-540-38366-6_11
Tang G, Li X, Cao J, Liu S, Chen G, Man H, Zhang X, Shi S, Sun J, Li Y, Calabia A (2019) APOD mission status and preliminary results. Sci China Earth Sci 63(2):257–266. https://doi.org/10.1007/S11430-018-9362-6
Tapley B, Ries J, Bettadpur S, Chambers D, Cheng M, Condi F, Gunter B, Kang Z, Nagel P, Pastor R, Pekker T, Poole S, Wang F (2005) GGM02–an improved Earth gravity field model from GRACE. J Geodesy 79(8):467–478. https://doi.org/10.1007/S00190-005-0480-Z/METRICS
Thomas TC, Luthcke SB, Pennington TA, Nicholas JB, Rowlands DD (2021) ICESat-2 precision orbit determination. Earth Space Sci 8(4):e2020EA001496. https://doi.org/10.1029/2020EA001496
van den Ijssel J, Encarnação J, Doornbos E, Visser P (2015) Precise science orbits for the Swarm satellite constellation. Adv Space Res 56(6):1042–1055. https://doi.org/10.1016/J.ASR.2015.06.002
van den Helleputte T, Visser P, Patino Rodriguez E (2003) Champ precise orbit determination using GPS data. Adv Space Res 31(8):1889–1895. https://doi.org/10.1016/S0273-1177(03)00161-3
van Helleputte T, Visser P (2008) GPS based orbit determination using accelerometer data. Aerosp Sci Technol 12(6):478–484. https://doi.org/10.1016/J.AST.2007.11.002
van Helleputte T, Doornbos E, Visser P (2009) CHAMP and GRACE accelerometer calibration by GPS-based orbit determination. Adv Space Res 43(12):1890–1896. https://doi.org/10.1016/J.ASR.2009.02.017
Visser PNAM, van den Ijssel J (2003) Aiming at a 1-cm orbit for low earth orbiters: reduced-dynamic and kinematic precise orbit determination. Space Sci Rev 108(1):27–36. https://doi.org/10.1023/A:1026253328154
Visser PNAM, van den IJssel JAA (2000) GPS-based precise orbit determination of the very low Earth-orbiting gravity mission GOCE. J Geodesy 74(7):590–602. https://doi.org/10.1007/S001900000119
Visser P, van den Ijssel J, van Helleputte T, Bock H, Jaeggi A, Beutler G, Heinze M (2010) Rapid and precise orbit determination for the GOCE satellite. ESA Living Planet Symposium.
Visser PNAM, van den IJssel JAA (2016) Orbit determination and estimation of non-gravitational accelerations for the GOCE reentry phase. Adv Space Res 58(9):1840–1853. https://doi.org/10.1016/J.ASR.2016.07.013
Visser PNAM, van den Ijssel J, van Helleputte T, Bock H, Jäggi A, Beutler G, Švehla D, Hugentobler U, Heinze M (2009) Orbit determination for the GOCE satellite. Adv Space Res 43(5):760–768. https://doi.org/10.1016/J.ASR.2008.09.016
Wang F, Gong X, Sang J, Zhang X (2015) A novel method for precise onboard real-time orbit determination with a standalone GPS receiver. Sensors 15(12):30403–30418. https://doi.org/10.3390/S151229805
Wang K, Allahvirdi-Zadeh A, El-Mowafy A, Gross JN (2020a) A sensitivity study of POD using dual-frequency GPS for CubeSats data limitation and resources. Remote Sens 12(13):2107. https://doi.org/10.3390/RS12132107
Wang L, Xu B, Fu W, Chen R, Li T, Han Y, Zhou H (2020b) Centimeter-level precise orbit determination for the Luojia-1A satellite using Beidou observations. Remote Sens 12(12):2063. https://doi.org/10.3390/RS12122063
Wen J, Li S, Lin Z, Hu Y, Huang C (2012) Systematic literature review of machine learning based software development effort estimation models. Inf Softw Technol 54(1):41–59. https://doi.org/10.1016/J.INFSOF.2011.09.002
Wermuth M, Hauschild A, Montenbruck O, Kahle R (2012) TerraSAR-X precise orbit determination with real-time GPS ephemerides. Adv Space Res 50(5):549–559. https://doi.org/10.1016/J.ASR.2012.03.014
Wermuth M, Hauschild A, Montenbruck O, Jäggi A (2009). TerraSAR-X Rapid and Precise Orbit Determination.
Xia Y, Liu X, Guo J, Yang Z, Qi L, Ji B, Chang X (2021) On GPS data quality of GRACE-FO and GRACE satellites: effects of phase center variation and satellite attitude on precise orbit determination. Acta Geod Geoph 56(1):93–111. https://doi.org/10.1007/S40328-020-00324-2/TABLES/5
Xianping Q, Yuanxi Y (2005) Evaluation of CHAMP satellite orbit with SLR measurements. Geo-Spatial Inform Sci 8(3):209–213. https://doi.org/10.1007/BF02826823
Xiong C, Lu C, Zhu J, Ding H (2017) Orbit determination using real tracking data from FY3C-GNOS. Adv Space Res 60(3):543–556. https://doi.org/10.1016/J.ASR.2017.04.013
Yang Y, Yue X, Yuan J, Rizos C (2014) Enhancing the kinematic precise orbit determination of low earth orbiters using GPS receiver clock modelling. Adv Space Res 54(9):1901–1912. https://doi.org/10.1016/J.ASR.2014.07.016
Yang Y, Yue X, Dempster AG (2016) GPS-based onboard real-time orbit determination for leo satellites using consider Kalman filter. IEEE Trans Aerosp Electron Syst 52(2):769–777. https://doi.org/10.1109/TAES.2015.140758
Yang Y, Yue X, Yuan J (2015) GPS based reduced-dynamic orbit determination for low earth orbiters with ambiguity fixing. Int J Aerosp Eng. https://doi.org/10.1155/2015/723414
Yoon JC, Lee BS, Choi KH (2000) Spacecraft orbit determination using GPS navigation solutions. Aerosp Sci Technol 4(3):215–221. https://doi.org/10.1016/S1270-9638(00)00130-9
Yoon YT, Eineder M, Yague-Martinez N, Montenbruck O (2009) TerraSAR-X precise trajectory estimation and quality assessment. IEEE Trans Geosci Remote Sens 47(6):1859–1868. https://doi.org/10.1109/TGRS.2008.2006983
Yoshioka T, Murata M (2009). An Assessment of GPS-based precise point positioning of the low earth-orbiting satellite CHAMP | IEEE Conference Publication | IEEE Xplore. ICCAS-SICE. https://ieeexplore.ieee.org/document/5334336
Yu Z, You Z (2011) Real-time onboard orbit determination using GPS navigation solutions. Proceedings - 2011 international conference on instrumentation, measurement, computer, communication and control, IMCCC, 949–952. https://doi.org/10.1109/IMCCC.2011.239
Zandbergen R, Otten M, Righetti PL, Kuijper D, Dow JM (2003) Routine operational and high-precision orbit determination of envisat. Adv Space Res 31(8):1953–1958. https://doi.org/10.1016/S0273-1177(03)00154-6
Zehentner N, Mayer-Gürr T (2016) Precise orbit determination based on raw GPS measurements. J Geodesy 90(3):275–286. https://doi.org/10.1007/S00190-015-0872-7/FIGURES/13
Zelensky NP, Lemoine FG, Ziebart M, Sibthorpe A, Willis P, Beckley BD, Klosko SM, Chinn DS, Rowlands DD, Luthcke SB, Pavlis DE, Luceri V (2010) DORIS/SLR POD modeling improvements for Jason-1 and Jason-2. Adv Space Res 46(12):1541–1558. https://doi.org/10.1016/J.ASR.2010.05.008
Zelensky NP, Lemoine FG, Chinn DS, Beckley BD, Bordyugov O, Yang X, Wimert J, Pavlis D (2016) Towards the 1-cm SARAL orbit. Adv Space Res 58(12):2651–2676. https://doi.org/10.1016/J.ASR.2015.12.011
Zeng T, Sui L, Jia X, Lv Z, Ji G, Dai Q, Zhang Q (2019) Validation of enhanced orbit determination for GPS satellites with LEO GPS data considering multi ground station networks. Adv Space Res 63(9):2938–2951. https://doi.org/10.1016/J.ASR.2018.06.012
Zhang B, Wang Z, Zhou L, Feng J, Qiu Y, Li F (2017) Precise orbit solution for swarm using space-borne GPS data and optimized pseudo-stochastic pulses. Sensors 17(3):635. https://doi.org/10.3390/S17030635
Zhao Q, Wang C, Guo J, Yang G, Liao M, Ma H, Liu J (2017a) Enhanced orbit determination for BeiDou satellites with FengYun-3C onboard GNSS data. GPS Solut 21(3):1179–1190. https://doi.org/10.1007/S10291-017-0604-Y/FIGURES/11
Zhao G, Zhou XH, Wu B (2012) Precise orbit determination of Haiyang-2 using satellite laser ranging. Chin Sci Bull 58(6):589–597. https://doi.org/10.1007/S11434-012-5564-6
Zhao Y, Yu F, Xu N (2017b) PPP augmentation and real-time precise orbit determination for LEO satellites. Chin Control Conf CCC,. https://doi.org/10.23919/CHICC.2017.8028299
Zhou X, Chen H, Fan W, Zhou X, Chen Q, Jiang W (2021) Assessment of single-difference and track-to-track ambiguity resolution in LEO precise orbit determination. GPS Solut 25(2):1–15. https://doi.org/10.1007/S10291-021-01103-4/TABLES/3
Zhou C, Zhong S, Peng B, Ou J, Zhang J, Chen R (2020) Real-time orbit determination of Low Earth orbit satellite based on RINEX/DORIS 3.0 phase data and spaceborne GPS data. Adv Space Res 66(7):1700–1712. https://doi.org/10.1016/J.ASR.2020.06.027
Acknowledgements
This work was supported by the Jane and Aatos Erkko Foundation (JAES) and by the Technology Industries Finland 100-year Foundation in the INCUBATE project. The authors would like to thank the reviewers for their insightful comments.
Funding
Open Access funding provided by University of Vaasa (UVA).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Supplementary Information
Below is the link to the electronic supplementary material.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Selvan, K., Siemuri, A., Prol, F.S. et al. Precise orbit determination of LEO satellites: a systematic review. GPS Solut 27, 178 (2023). https://doi.org/10.1007/s10291-023-01520-7
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-023-01520-7