
Abstract
The High Accuracy Service (HAS) is an upcoming addition to the Galileo service portfolio that offers free correction data for precise point positioning in real-time. Beyond terrestrial and aeronautical applications, precise orbit determination (POD) of satellites in low Earth orbit (LEO) has been proposed as a potential use case for HAS corrections in view of their global availability. Based on HAS data collected during a test campaign in September 2021, the benefit of HAS corrections is assessed for real-time, onboard navigation as well as near real-time POD on the ground using GNSS observations of the Sentinel-6A LEO satellite. Compared to real-time POD using only broadcast ephemerides, performance improvements of about 40%, 10%, and 5% in terms of 3D position error can already be achieved for GPS-only, GPS + Galileo, and Galileo-only navigation. While Galileo processing benefits only moderately from the HAS correction data during the early tests in view of an already excellent Open Service performance, their use is highly advantageous for GPS processing and enables dual-constellation navigation with balanced contributions of both GNSSs for improved robustness. For near real-time offline POD, HAS corrections offer reduced latency or accuracy compared to established ultra-rapid GNSS orbit and clock products as well as independence from external sources.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
GNSS-based precise orbit determination (POD) is nowadays a well-established technique for earth exploration and geodesy missions in low earth orbit (LEO) that require accurate knowledge of the satellite position to achieve their mission goals. Similar to precise point positioning (PPP; Malys and Jensen 1990; Zumberge et al. 1997; Kouba et al. 2017) for terrestrial users, the technique builds on the use of low-noise carrier-phase observations as well as precise GNSS orbit and clock products. These are typically combined with a dynamic or reduced-dynamic orbit model to describe the motion of the LEO satellite between consecutive measurement epochs (Yunck et al. 1994). Recent results for satellites of the GRACE-FO, Swarm and Sentinel-3/6 missions (Kang et al. 2020; Mao et al. 2021; Montenbruck et al. 2021) have demonstrated the feasibility of cm-level POD when making use of post-processed precise GNSS orbit and clock products as offered by the International GNSS Service (IGS; Johnston et al. 2017) and its individual analysis centers. For onboard applications, the achievable real-time navigation accuracy is generally limited by the quality of broadcast ephemerides, which presently represent the only source of GNSS orbit and clock information that is directly accessible on LEO satellites in real-time through the signal-in-space. Considering GPS, that is most widely supported by spaceborne GNSS receivers today, 3D RMS positioning errors of about 25–70 cm are reported in offline studies of real-time navigation based on actual flight data from various LEO missions (Montenbruck and Ramos-Bosch 2008; Wang et al. 2015; Darugna et al. 2022). Even though the latter work identifies a factor-of-two improvement for Galileo-based onboard navigation in view of the notably improved broadcast ephemeris quality, the use of external correction data transmitted through geostationary telecommunication satellites is still often considered as a prerequisite for PPP and precise real-time orbit determination of LEO satellites (Toral et al. 2006; Tegedor et al. 2022).
This situation is about to change with the launch of the new Galileo High Accuracy Service (HAS; GSA 2020; Fernández-Hernández et al. 2022) that will transmit free correction data for GPS and Galileo broadcast ephemerides through the E6B signal of Galileo. Other than the Centimeter Level Augmentation Service (CLAS; Namie and Kubo 2020) of the Japanese Quasi-Zenith Satellite System (QZSS) and the PPP-B2b Precise Point Positioning Service of the Chinese BeiDou-3 system (Zhang et al 2022), the Galileo HAS is designed as a fully global service, offering GPS and Galileo correction data for world-wide users. Next to terrestrial and aviation users, HAS corrections can also be received by satellites in low earth orbit, where they can provide essentially continuous access to precise GNSS orbit and clock data without a need for external data links.
With the above background, the present study aims to assess HAS use for real-time and near real-time POD of LEO satellites based on early test transmissions performed in September 2021. Following a general overview of the HAS system architecture, the LEO GNSS observations and HAS data used in the study are discussed. Thereafter, a detailed characterization of the availability and quality of GPS and Galileo corrections obtained in the early HAS trial is presented. The POD performance achievable with HAS corrections in near real-time and real-time applications is studied next, and compared with the use of ultra-rapid precise ephemerides and broadcast ephemerides, respectively. Based on these results, a summary and conclusions are presented in the final section.
HAS overview
The Galileo High Accuracy Service, which is currently under development, offers freely available correction data for PPP with GPS and Galileo observations (GSA 2020; Fernández-Hernández et al. 2022). Once completed, it will comprise orbit and clock corrections as well as code and phase biases enabling a better than 20 cm (95%) horizontal positioning accuracy at 5 min convergence time (Service Level 1). As part of a complementary Service Level 2, additional information such as atmospheric corrections will be provided for regional users, targeting at a similar accuracy but a 3-times reduction in convergence time. HAS orbit and clock information is provided in the form of orbit and clock differences with respect to the respective data in the LNAV (legacy navigation) message of the GPS L1 C/A-code signal (SMSC 2021) and the INAV (originally referring to “integrity navigation”) message of the Galileo E1 and E5b signal (EU 2021a). These data are complemented by code biases enabling positioning with diverse user signals, as well as phase biases supporting integer ambiguity resolution.
HAS data are transmitted by the Galileo satellites within the CNAV (originally referring to “commercial service”) navigation message of the E6B signal, which continues to use an unencrypted ranging code and will remain freely accessible to all users. Individual HAS messages may contain different combinations of metadata, orbit and clock corrections, and biases and use a highly efficient packing scheme (EU 2022) that is inspired by the Compact State Space Representation (SSR) message of the QZSS CLAS (Hirokawa et al.2021). Message lengths are not fixed but vary with content and number of supported satellites. For embedding into the CNAV message, each HAS message is split into multiple parts, termed pages, of 424 bits each. By way of example, 15 pages are required to transmit the slowly varying orbit corrections and auxiliary data along with code and phase biases for the current GPS and Galileo constellation, while two pages are sufficient for the respective clock corrections that typically need to be transmitted at a higher rate.
To best exploit the multiplicity of space-to-ground links enabled by the entire Galileo constellation and to minimize the overall time required for transmitting all pages of a HAS message to any of its users, a sophisticated dissemination scheme has been developed, which makes use of a high-parity Reed–Solomon (RS) encoding (Fernández-Hernández et al. 2020). Here, a total of set 255 code pages (including 32 original pages and 223 parity pages) is formed from up to 32 pages of a given HAS message. Distinct subsets of the 255 pages are then uploaded and transmitted to the individual Galileo satellites in a way that ensures a maximum diversity of messages received by users at arbitrary locations. A HAS message composed of \(k\) original pages can then be unambiguously reconstructed from any set of \(k\) RS encoded pages received in parallel or consecutively from the set of visible satellites. Except for uplink limitations, a complete set of corrections for the full GPS and Galileo constellations can thus concurrently be made available to globally distributed users within a few seconds.
The dissemination of HAS messages via the global Galileo constellation is illustrated in Fig. 1. Depending on its location and the visible Galileo satellites, a receiver obtains a different sequence of individual pages from the encoded HAS message. Once an arbitrary (but distinct) set of k encoded pages has been received over time from the tracked satellites, the original HAS message can be recovered by the RS decoding. The total time to receive a complete HAS message depends on the number of concurrently tracked satellites: While user A obtains only two pages at a time and takes 3 s to extract the full 5-page message, user B with three Galileo satellites receives the same HAS message in only 2 s. Aside from a slightly different latency, the distribution scheme ensures that all users around the globe can concurrently obtain the same set of correction data irrespective of their location. In the actual implementation of the Galileo HAS, messages presently comprise either 2 pages (clock corrections) or 15 pages (mask, orbit corrections, and biases) that are RS encoded into 255 code pages. At a representative number of 3–4 tracked Galileo satellites transmitting HAS data, the long messages can be decoded within 4–5 s after the start of dissemination, while the short HAS messages are obtained within one second.

Conceptual view of HAS message distribution. In the example, a HAS correction message comprising \(k=5\) pages denoted as U, …, Y is Reed–Solomon (RS) encoded into a total of 10 pages A, …, J that are uploaded to the Galileo satellites and broadcast at a rate of one page per second. The subset and sequence of transmitted pages vary from satellite to satellite. Different colors (orange, blue, green) are used in the figure to indicate pages transmitted in the 1st, 2nd and 3rd second. See text for further explanation
Currently, Galileo HAS uses the same monitoring infrastructure of Galileo 14 monitoring stations, or GSS (Galileo Sensor Stations), which are also used for the generation of broadcast ephemeris data. The performance improvement for HAS is mainly due to the satellite clock estimation every second (HAS) instead of every 10 min (OS), a shorter update rate of up to 10 s (HAS) instead of 10 min (OS), and a more refined measurement processing for HAS, including carrier phase ambiguity resolution at the GSS.
As part of the HAS build-up, various test campaigns have been conducted with limited public participation. Initial results from the September 2021 campaign are reported in Gioia et al. (2022) and Martini et al. (2022). That campaign included transmission of orbit and clock corrections as well as code biases for GPS and Galileo. New HAS messages with clock corrections covering 2 pages were transmitted once every 10 s, while long messages with orbit corrections and biases comprising 15 pages were updated and transmitted once every 50 s. In total, roughly 10,000 distinct messages were disseminated in total per day and could be received through E6B-capable receivers around the globe. During the test campaign, the HAS signal was subject to some limitations, such as connectivity issues, particularly in the Pacific region, and a lack of corrections for a small subset of healthy GPS satellites. Furthermore, no fractional phase biases were provided. As such, positioning with the HAS test data is restricted to code-only or float-ambiguity carrier phase processing but could not benefit from integer ambiguity resolution. Overall, the performance reported here for the early test transmissions is indicative of a lower bound of the operational HAS.
LEO GNSS and HAS data
For the assessment of HAS-based precise orbit determination, we make use of GNSS observations collected with the PODRIX receiver onboard the Sentinel-6A “Michael Freilich” spacecraft (Fig. 2). The oceanography mission serves as a continuation of the TOPEX/Poseidon and Jason missions and provides continued sea surface altimetry as well as microwave radiometer measurements (Donlon et al. 2021); Sentinel-6A orbits the earth at 1340 km altitude in an orbital plane with 66° inclination, where it completes one revolution in roughly 110 min.

Artist’s impression of the Sentinel-6A spacecraft. Image credit: ESA/ATG Medialab, CC BY-SA IGO 3.0
The PODRIX receiver onboard Sentinel-6A supports the tracking of GPS and Galileo signals in the L1/L2 and E1/E5a frequency bands (Montenbruck et al. 2021). Depending on the block type and signal availability, either L1/L2 P(Y) or the civil L1 C/A and L2C signals are tracked for GPS satellites. For Galileo, the pilot components of the E1 open service signal and the E5a signal are used in the measurement generation. With the available number of hardware channels and a 10° antenna elevation mask angle, an average of 7–8 GPS satellites and 6–7 Galileo satellites are tracked at any time, where the differences roughly reflect the number of healthy satellites within the two constellations. As a reference for the (near) real-time POD analysis, we make use of ambiguity-fixed precise orbit products of the Sentinel-6A satellite, which are discussed in full detail in Montenbruck et al. (2021).
Raw Galileo E6B CNAV data were recorded from various DLR multi-GNSS sensor stations equipped with PolaRx5 receivers located in Oberpfaffenhofen, Germany, Forteleza, Brazil, and Maui, Hawaii. While each Galileo satellite transmits an independent set of RS-encoded HAS message pages, an identical and complete set of HAS messages is recovered from each station under nominal conditions. As an example, identical orbit/bias and clock messages covering the GPS and Galileo constellation were obtained by two stations in Hawaii and Germany with a representative jitter of about 1 s in the respective receive time, even though the two stations have essentially no overlapping visibility of individual Galileo satellites. We can therefore assume that continuous reception and availability of HAS corrections data do not depend on the receiver location during future HAS operations and would likewise be ensured for an orbiting platform within the terrestrial service volume.
Based on the above considerations, HAS messages for the 4-week campaign period (September 2–30, 2021) were decoded exclusively from the recorded raw data of the Oberpfaffenhofen station. Following RS decoding of the Galileo CNAV frames, orbit corrections, clock corrections and biases were extracted from the resulting HAS message as described in EU (2022) and Fernández-Hernández et al. (2022). To facilitate the exchange of HAS data and their use in established tools for POD and GNSS data analysis, dedicated HAS orbit and clock products in SP3 (Hilla 2016) and clock RINEX format (Ray and Coleman 2017) were generated on a daily basis over the campaign period. For this purpose, HAS corrections were applied to satellite positions and clock offsets from the corresponding broadcast ephemerides on an equidistant epoch grid with 50 s and 10 s sampling, respectively, using pre-recorded GPS LNAV and Galileo INAV navigation data (Montenbruck and Steigenberger 2022) in RINEX4 format (Romero 2021). For compatibility with established IGS orbit products, the HAS orbits were translated from the antenna-phase-center (APC) to the center-of-mass (CoM) using the latest igs14.atx antenna model (Rebischung and Schmid 2016) applicable for the test period. In addition to orbit and clock data, HAS code biases were archived in the bias SINEX format (Schaer 2016) after extraction from the raw HAS messages. Out of the entire campaign, two intervals (Sept. 2, 09:00 to Sept. 9, 09:00 and Sept. 23, 14:00 to Sept. 30, 12:00) of roughly one-week duration are considered in the sequel, during which correction data were provided for both the GPS and Galileo constellations.
Availability of HAS corrections
The completeness of the HAS correction messages is analyzed based on the orbit correction and bias message received at DLR’s reference station in Oberpfaffenhofen, Germany. During the test campaign, the message was disseminated with an update rate of 50 s, which resulted in 1728 messages for a complete day. The availability of the correction messages was typically higher than 99.7%. Exceptions were three days (Sept. 06, 24 and 25), where the correction stream was affected by short interruptions, and the first and the last day of the test weeks, where the data stream started or stopped at mid-day.
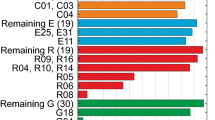
No corrections were transmitted for satellites flagged as “unhealthy,” which includes PRNs G11, G28, E14 and E18 for the entire time of the test period. Furthermore, the Galileo satellite E01 was set to “marginal” state (EU 2021b) during Sept. 5–21 following a clock anomaly (Martini et al. 2022) and was therefore also unusable for positioning. Three other GPS satellites were missing entirely (G02 and G18) or for most of the time (G27) in the correction data, even though they were healthy and usable during the test period.
Counting all available corrections for both constellations without the fully or partially missing satellites, the overall completeness of the GPS satellites is 93.5% in the first week and 90.3% in the second week. For the Galileo constellation, the availability in the first week is similar at 94.4% and increases to 97.8% in the second week. Including the missing but healthy satellites in the statistics for GPS, the availability is approximately 80% in the first week and 75% in the second week.
The service provider computes the HAS orbit and clock corrections by forming differences of the estimated precise satellite position and clock offset values from the broadcast ephemerides (BCEs). The corresponding set of broadcast ephemerides is identified by the issue-of-data (IOD) number, and the user must have received the proper navigation message in order to be able to use the corrections. The correction service provider should ideally use up-to-date broadcast ephemeris records for the computation of the corrections and transition to a new record not before the user has received it. The transition should also not happen too late, so the user does not have to keep several superseded records in store. Furthermore, the BCEs are only valid for a limited period of time and must not be used outside their validity interval. For GPS, the validity interval is equal to the fit interval of the BCEs, which can vary in length, but is set to 4 h in the majority of the cases. GPS ephemeris records are typically updated every two hours. The Galileo BCEs are also valid for 4 h (EU 2021b), but are typically updated at much shorter intervals of down to ten minutes.
Normally, orbit and clock offset corrections should not be referred to as broadcast ephemeris records which are outside their validity interval at the point in time the corrections are disseminated. For the HAS test period in September 2021, all of the disseminated corrections for Galileo referred to currently valid BCEs. However, in the case of GPS, 1.6% of the corrections in the first week and 5.1% in the second week referred to already expired BCE records due to limitations in the initial testing configuration. For this study, it was decided to use the nominal BCE validity interval and accept the resulting small loss in available GPS orbits and clock corrections.
HAS accuracy
For a quality assessment of the GPS and Galileo corrections, the orbit, clock and bias products generated from the HAS corrections were compared to precise reference products provided by the IGS and its analysis centers, taking into account the relevant orbit and clock reference points and differences in the respective clock reference signals. More specifically, the Center of Orbit Determination in Europe (CODE) rapid orbit and clock products (Dach et al. 2020) and differential code biases (DCBs) from the Chinese Academy of Sciences (CAS; Wang et al. 2016) were chosen for the comparison.
Results for the radial, along-track and cross-track orbit errors as well as the signal-in-space range error (SISRE) for the GPS and Galileo HAS corrections are listed in Table 1. For the SISRE analysis, the CODE reference ephemerides were translated to the native HAS clock reference signals, i.e., L1C/L2P(Y) and E1/E5b, using CAS differential code biases. It should be noted that GPS satellite G25 exhibited very large orbit and clock offset errors during the second test week. These outliers can be attributed to the early test phase of the HAS correction service and are not considered to reflect future operational performance. Therefore, this satellite was excluded from the statistics between Sept. 24–28.
The analysis shows that GPS orbit errors for broadcast ephemerides with HAS corrections in the first test week are notably larger than in the second week. The degraded HAS orbit quality is mainly due to the contribution of satellite G09, which exhibits along-track errors of up to approximately 3 m in that period. For Galileo, a more consistent HAS orbit quality is obtained, but a small improvement in the second week can be seen for the along-track component.
The overall quality of the HAS ephemeris data is characterized through their RMS SISRE, which provides a global average of the line-of-sight projected orbit errors and clock errors (Montenbruck et al. 2018). For GPS, RMS SISRE values amount to 20.0 cm and 21.4 cm in the first and second week, respectively, which is driven by errors in the HAS clock offsets. The quality of the GPS corrections is expected to improve prior to the operational HAS delivery. For Galileo, the SISRE is significantly smaller, with 9.6 cm and 7.8 cm in the two test weeks. For comparison, Table 1 also lists the respective performance indicators for uncorrected broadcast ephemerides in parenthesis. It can be recognized that HAS benefits are most pronounced for GPS, especially in the along- and cross-track orbit component. The relative improvements are smaller for Galileo, because the broadcast ephemerides for this constellation already exhibit smaller orbit and clock offset errors.
Table 1 also lists modified “de-biased SISRE” metrics, for which constant, satellite-dependent clock offset errors are removed prior to computing the SISRE statistics. In carrier-phase-based positioning without ambiguity resolution, constant satellite biases are absorbed in the float ambiguity parameters without degrading the estimated coordinates. Only temporal variations of the orbit and clock errors affect the positioning solution, and their impact is best characterized by this modified SISRE. An obvious performance improvement can be seen when considering the de-biased SISRE of GPS, which indicates that notable constant but satellite-dependent biases are present in the comparison of HAS clock offsets and the CODE reference product. This is an expected result, as earlier studies have shown that pseudorange measurements of legacy GPS signals are strongly affected by correlator-dependent biases, which lead to satellite-specific offsets in clock solutions generated with different reference receiver networks (Hauschild et al. 2019). For the same reason, estimated DCB values necessary to align the different clock reference signals of HAS corrections and CODE reference product may be biased and affect the SISRE. In view of a fully digital signal generation, the problem of correlator-dependent pseudorange biases is much less pronounced for Galileo, which is also reflected in only a marginal reduction of the de-biased SISRE for this constellation as compared to the conventional SISRE definition.
HAS pseudorange biases for GPS and Galileo are disseminated as observable-specific, pseudo-absolute biases, which are to be added to the corresponding observations by the user (EU 2022; Fernández-Hernández et al. 2022). In the subsequent comparison with IGS DCBs, individual signals are identified by their RINEX observation codes (Romero 2021), which are listed in parenthesis after the signal names. For GPS, biases for the L1 C/A signal (C1C) and the pilot channel of the L2C signal (C2L) were transmitted during the HAS tests. For the Galileo system, the HAS test data provided biases for the E1 Open Service pilot signal (C1C), the E5a (C5Q) and E5b (C7Q) pilot signals, and the E6B signal (C6B) carrying the HAS data. Differential biases were formed from the HAS values and then compared to the corresponding DCBs from the CAS reference product. A constellation-mean DCB value has been removed from the statistics and missing C6B biases in the CAS product were substituted by the respective C6C values. The results collated in Table 2 evidence a better than 0.1 ns, or 3 cm, agreement of HAS and CAS values for the GPS C1C-C2L, while the Galileo DCBs exhibit slightly larger RMS errors of 0.1–0.2 ns.
Finally, the quality of HAS corrections was assessed in a kinematic precise point positioning using 24 h of GPS L1CA/L2C and Galileo E1/E5a observations collected by the IGS station BRUX on Sept. 28. Ignoring the first hour of the Kalman-filtered solution, 95th percentile errors of 11.7 cm, 14.5 cm and 29.7 cm were obtained for the North, East and up component of the station position relative to IGS reference values in the HAS-based processing after initial convergence as compared to 2.7 cm, 1.7 cm and 4.3 cm when working with CODE rapid products. While the achieved results may vary with the specific choice of PPP models and algorithms, the results illustrate a good overall consistency of the HAS performance during the September 2021 test transmissions with expectations for the future operational service.
Precise orbit determination performance
This section discusses the use of HAS corrections for precise orbit determination of the Sentinel-6A satellite based on GPS and Galileo observations. In the context of near real-time POD, the benefit of HAS-based orbit and clock information is assessed in comparison with ultra-rapid orbit and clock products of the International GNSS Service using a reduced-dynamic batch POD approach for the LEO satellite. For real-time navigation, the processing of HAS corrections is compared against the use of uncorrected broadcast ephemerides in a sequential, forward-only Kalman filter that is operated in a play-back-mode with pre-recorded flight data. All tests were performed using the Reduced Dynamic Orbit Determination (RDOD) and Real-Time Navigation (RTNAVI) modules of the GNSS High Precision Software Tools (GHOST) that are discussed in Wermuth et al. (2010) and Montenbruck et al. (2022). Relevant models and standards applied in the two processing schemes are summarized in Table 3. In the absence of truth orbits, the performance of all test cases is assessed against ambiguity-fixed precise orbit products of the Sentinel-6A satellite (Montenbruck et al. 2021) that have been verified to offer 3D RMS accuracy at the 1-cm level in SLR analyses and interagency-comparisons (CPOD 2021). While the reference orbits are actually based on the same GNSS observations as the POD solutions under investigation in this study, the processing methodology and auxiliary data used in their generation are sufficiently different and of higher quality to serve as an independent reference for our quality assessment.
Near real-time POD
For an assessment of near real-time (NRT) precise orbit determination, Sentinel-6A GPS and Galileo observations were processed as a series of overlapping 3-h data arcs with a 2-h shift between consecutive PODs over the two test weeks. This scenario is intended to resemble the low-latency processing of GNSS data downloaded from a LEO satellite about once per orbit but choosing a slightly longer data arc for improved stability. Even though actual NRT processing schemes for LEO missions are likely to differ in the specific choice of start times and arc length, the above scheme is considered generally representative and suitable to highlight the performance achievable with sub-daily observation arcs and (near-) real-time GNSS orbit and clock data. To better assess the HAS-based POD quality, we also generate NRT solutions using the WUM0MGXULA ultra-rapid multi-GNSS orbit and clock products provided by the IGS analysis center of Wuhan University (Ma et al. 2017; Ogutcu and Farhan 2022). The ultra-rapid products comprise 24 h of observed orbit and clock data followed by a 24 h prediction and are generated 24 times a day with one-hour latency after the end of the observed part. For the simulated near real-time processing, we made use of the latest available 3 h of the observed part, which implies a waiting time of roughly 1 h after the arrival of the LEO GNSS observations but promises better performance than the use of the predicted part. The Wuhan orbit and clock products were, furthermore, complemented with CAS DCBs (Wang et al. 2016) to support consistent processing of the block-specific GPS observation types (semi-codeless P(Y) versus L1 C/A and L2C) of the PODRIX GNSS receiver. Furthermore, predicted values of the IGS rapid earth rotation parameters were applied for transformations between the celestial and terrestrial reference frame in the observation modeling.
Results for the NRT processing of Sentinel-6A covering a total of 12 full days in the test period are shown in Fig. 3 for the different types of GNSS orbit and clock products. The RMS of 3D position errors with respect to a precise reference orbit is displayed. Median values amount to 9.4 cm, 6.8 cm, and 6.9 cm for the use of the hourly ultra-rapid GNSS products in a GPS-only, Galileo-only and combined GPS + Galileo processing. When using HAS-corrected broadcast ephemerides, corresponding values of 9.9 cm, 7.8 cm, and 7.5 cm are obtained for the three cases, and a somewhat larger scatter in the achieved performance can be observed. While a reduced performance of the real-time HAS ephemerides compared to the hourly ultra-rapid product is expected in general, the actual results show only a minor, < 10%, degradation, which appears tolerable in exchange for the achieved gain in the timeliness of the POD process. Furthermore, a more homogenous and stable NRT processing performance can be expected with a fully continuous HAS data provision for all GPS and Galileo satellites after the completion of the current test phase.

Box-whisker plot illustrating the distribution of 3D RMS errors in simulated NRT POD of Sentinel-6A using 3-h data batches with different types of GPS + Galileo orbit and clock products for September 3–8 and 24–29. Solid blue lines and shaded boxes denote the median and inter-quartile range (IQR), while whiskers extend to 1.5 times the IQR around the median
Real-time POD
For the simulated real-time processing, we compare results obtained with the sole use of broadcast ephemerides to results obtained with HAS-corrected broadcast ephemerides. GNSS orbit and clock information for broadcast-only processing was based on GPS LNAV and Galileo FNAV navigation messages, which were complemented by differential code biases from GPS CNAV to enable proper modeling of L1 C/A and L2C observations as provided by the PODRIX receiver for the modernized GPS satellites. For the HAS-based processing, signal-specific code biases were taken directly from the HAS data messages and consistently applied in modeling the respective ionosphere-free pseudorange observations of GPS and Galileo. In all cases, earth rotation parameters (ERPs) required for the transformation between the terrestrial and celestial reference frames were taken from the GPS CNAV navigation messages, which provide pole coordinates and UT1-UTC offsets with representative accuracy at the 1-milli-arcsecond and 0.1-ms level (Steigenberger et al. 2022). In this context, it may be noted that ERPs are neither included in the presently defined Galileo broadcast navigation message nor the HAS correction data. As such, joint GPS and Galileo tracking are desired for a fully autonomous GNSS-based onboard navigation without a need for auxiliary data uploads from the ground.
The real-time navigation filter used for this study (Montenbruck et al. 2022) is based on an extended Kalman filter with a reduced-dynamic force model and builds on the concept of pseudo-ambiguities, which lump the actual carrier phase ambiguity for compensation of signal-in-space range errors (Montenbruck and Ramos-Bosch 2008; Wang et al. 2015). Depending on the quality of the GNSS orbit and clock information, optimum performance is achieved with different observation weights and process noise values for the pseudo-ambiguities that were determined through a parametric search using the agreement with the precise Sentinel-6A reference orbits as a quality criterion. As shown in Table 4, GPS observations were de-weighted by a factor of two compared to Galileo when working with uncorrected broadcast ephemerides to account for the different SISRE values. In addition, a three times higher process noise for the pseudo-ambiguities was adopted. Given the higher and more uniform quality of the HAS-corrected orbit and clock data, equal weights representative of the actual measurement noise were applied for both constellations and the process noise for SISRE compensation was reduced accordingly. The respective values were found to offer the best overall performance in a limited parametric search.
Results for GPS-only, Galileo-only and combined GPS and Galileo real-time processing are summarized in Table 5 for two arcs of roughly one-week duration, which were each processed in a continuous run of the Kalman filter. The two data arcs, which were selected based on the joint availability of HAS corrections for GPS and Galileo, exhibit a slightly different performance but clearly demonstrate the feasibility of decimeter-level real-time navigation using onboard GNSS observations. In all cases, improved performance is achieved when using HAS corrections, even though the performance gain is most obvious for GPS-only or combined GPS + Galileo processing. These results reflect an already excellent quality of the current Galileo broadcast ephemerides but also show the pronounced improvement achievable with HAS corrections for GPS. Given the compatible quality of HAS-corrected GPS and Galileo observations, both constellations can contribute in a balanced way to the filtered navigation solution, thus increasing the redundancy and offering improved robustness of the resulting real-time orbit estimate.
A complementary graphical representation of navigation errors in radial, along-track and cross-track direction obtained in the combined GPS + Galileo processing for the second test week is shown in Fig. 4, which again illustrates a 10–20% improvement in precision when using the HAS data. Orbit errors in both solutions are dominated by orbit-periodic contributions, which reflect the response of the dynamical filtering in a near-circular orbit (Colombo 1989), but show a clearly lower amplitude when working with the HAS corrections.

Error of real-time navigation solution using GPS + Galileo observations with (red) and without (blue) HAS corrections. For each component, the corresponding mean value and standard deviation are given in the legend
Summary and conclusions
Based on two weeks of data collected during an early test campaign in September 2021, the pre-operational performance of the Galileo High Accuracy Service and its benefit for (near) real-time orbit determination of remote sensing satellites in low earth orbit have been assessed. Overall, HAS corrections were made available during the test period for roughly 95% of all satellites and epochs in the case of Galileo, while a reduced availability of 75–80% was achieved for GPS, partly due to testing limitations. Signal-in-space range errors of HAS-corrected broadcast ephemerides of 20–22 cm and 8–10 cm were achieved for GPS and Galileo, respectively. These values reduce to 12–16 cm and 7–9 cm when ignoring the impact of satellite-specific clock-offset biases that impact a code-based positioning but are of no relevance for carrier-phase-based precise positioning.
In near real-time processing of Sentinel-6A flight data using a short-arc batch-least-squares approach, representative orbit determination accuracies of 10 cm, 8 cm, and 7.5 cm were obtained with GPS-only, Galileo-only and combined GPS + Galileo observations based on HAS-corrected broadcast ephemerides. These results are marginally worse than those achieved with hourly ultra-rapid GNSS orbit and clock products of the IGS, but must be ranked against the benefit of a reduced latency of less than a minute compared to one hour and greater independence of the ground segment required for the processing of LEO spacecraft and science data. In the context of onboard processing, use of HAS corrections offers an obvious advantage over broadcast ephemerides. Benefits are most pronounced in a GPS-only real-time processing, where the 3D orbit determination errors of roughly 17–20 cm with broadcast ephemerides can be reduced to 9–12 cm when applying the HAS corrections. In view of the already very high quality of Galileo broadcast ephemerides, the relative performance gain is less pronounced for Galileo-only or combined GPS + Galileo processing but still amounts to roughly 10%. Overall, orbit determination errors of 7–9 cm were achieved in the simulated real-time processing of Sentinel-6A dual-constellation observations with HAS augmentation.
Despite various limitations in the availability and quality of correction data during the early trials, the results demonstrate a high potential for using the Galileo High Accuracy Service in precise orbit determination of LEO satellites. Compared to the sole use of broadcast ephemerides, HAS corrections offer an improved overall accuracy as well as enhanced robustness through the processing of dual-constellation data with similar performance. The seamless and global availability of HAS corrections facilitates the design of fully autonomous real-time navigation systems with (sub-)decimeter accuracy and supports advanced mission concepts that require accurate orbit information for near real-time onboard processing of optical imagery, synthetic aperture radar data, altimeter measurements, or radio occultation observations.
For completeness, it is noted that the present results do not yet benefit from single-receiver ambiguity-fixing that will be offered through fractional phase bias information in the fully operational High Accuracy Service, but was not supported in the early HAS testing. Overall, ambiguity fixing is known to offer performance enhancements by up to a factor of two in LEO POD (Mao et al. 2021), but it remains to be seen, whether and to what extent further improvements of dynamical and measurement models for real-time navigation would be required to exploit this potential fully.
Data availability
GNSS products used in this study are openly available through IGS data centers (e.g., https://cddis.nasa.gov/archive/gnss/, ftp://igs.ign.fr). GNSS observations of the Sentinel satellites are distributed through the PODAAC data center (https://podaac.jpl.nasa.gov/) and the Sentinel POD hub (https://scihub.copernicus.eu/gnss/#/home). Galileo CNAV data with HAS messages are freely available through the signal-in-space transmitted by the Galileo constellation. Samples of raw CNAV/HAS receiver data collected for this study can be made available on reasonable request.
Change history
28 August 2022
The original article is updated to correct the title of the article.
References
Colombo O (1989) The dynamics of Global Positioning System orbits and the determination of precise ephemerides. J Geophys Res Atmos 94(B7):9167–9182. https://doi.org/10.1029/JB094iB07p09167
CPOD (2021) Copernicus POD regular service review Apr.–Jun 2021, copernicus Sentinel-1, -2, -3 and -6 precise orbit determination service (CPOD), GMV-CPOD-RSR-0021, 2021/06/23
Dach R, Schaer S, Arnold D, Kalarus MS, Prange L, Stebler P, Villiger A, Jäggi A (2020) CODE rapid product series for the IGS. Published by Astronomical Institute, University of Bern. https://doi.org/10.7892/boris.75854.4
Darugna F, Casotto S, Bardella M, Sciarratta M, Zoccarato P, Giordano P (2022) Sentinel-6A GPS and galileo dual-frequency real-time reduced-dynamics P2OD. In: Proceedings of the NAVITEC 2022, 5–7 April 2022, IEEE
Donlon CJ, Cullen R, Giulicchi L, Vuilleumier P, Francis CR, Kuschnerus M, Simpson W, Bouridah A, Caleno M, Bertoni R, Rancaño J (2021) The Copernicus Sentinel-6 mission: enhanced continuity of satellite sea level measurements from space. Remote Sens Environ 258:112395. https://doi.org/10.1016/j.rse.2021.112395
EU (2022) Galileo High Accuracy Service Signal-In-Space Interface Control Document (HAS SIS ICD), Issue 1.0, European Union, May 2022
EU (2021a) European GNSS (Galileo) open service signal-in-space interface control document (OS SIS ICD) Issue 2.0, European Union, Jan 2021a
EU (2021b) European GNSS (Galileo) open service definition document (OS SDD) Issue 1.2, European Union, Nov 2021b
Fernández-Hernández I, Senni T, Borio D, Vecchione G (2020) High-parity vertical Reed-Solomon codes for long GNSS high-accuracy messages. NAVIGATION J Inst Navig 67(2):365–378. https://doi.org/10.1002/navi.357
Fernández-Hernández I, Chamorro-Moreno A, Cancela-Diaz S, Calle-Calle JD, Zoccarato P, Blonski D, Senni T, de Blas FJ, Hernández C, Simón J, Mozo A (2022) Galileo high accuracy service: initial definition and performance. GPS Solut 26(3):65. https://doi.org/10.1007/s10291-022-01247-x
Gioia C, Borio D, Susi M, Fernandez-Hernandez I (2022) The Galileo High Accuracy Service (HAS): decoding and processing live corrections for code-based positioning; In: Proceedinsg of the ION ITM 2022, pp 1065–1074. https://doi.org/10.33012/2022.18204
GSA (2020) Galileo high accuracy service HAS info note; European Global Navigation Satellite Systems Agency. https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_HAS_Info_Note.pdf
Hauschild A, Steigenberger P, Montenbruck O (2019) Inter-receiver GNSS pseudorange biases and their effect on clock and DCB estimation. In Proceedings of the ION GNSS + 2019, pp 3675–3685. https://doi.org/10.33012/2019.16975
Hilla S (2016) The extended standard product 3 orbit format (SP3-d), 21 February 2016. https://files.igs.org/pub/data/format/sp3d.pdf
Hirokawa R, Fernández-Hernández I, Reynolds S (2021) PPP/PPP-RTK open formats: overview, comparison, and proposal for an interoperable message. NAVIGATION J Inst Navig 68(4):759–778. https://doi.org/10.1002/navi.452
Johnston G, Riddell A, Hausler G (2017) The international GNSS service. In: Teunissen PJG, Montenbruck O (eds) Springer handbook of global navigation satellite systems, chap. 33. Springer, Cham, pp 967–982. https://doi.org/10.1007/978-3-319-42928-1_33
Kang Z, Bettadpur S, Nagel P, Save H, Poole S, Pie N (2020) GRACE-FO precise orbit determination and gravity recovery. J Geodesy 94(9):85. https://doi.org/10.1007/s00190-020-01414-3
Kouba J, Lahaye F, Tétreault P (2017) Precise point positioning. In: Teunissen PJG, Montenbruck O (eds) Springer handbook of global navigation satellite systems. Springer, Cham, pp 723–752. https://doi.org/10.1007/978-3-319-42928-1_25
Ma H, Zhao Q, Xu X (2017) A new method and strategy for precise ultra-rapid orbit determination. In Proceedings of the China Satellite Navigation Conference (CSNC) vol III, Shanghai, China, 23–25 May 2017; Lecture notes in electrical engineering. Springer, vol 439, pp 191–205. https://doi.org/10.1007/978-981-10-4594-3_17
Malys S, Jensen PA (1990) Geodetic point positioning with GPS carrier beat phase data from the CASA UNO experiment. Geophys Res Lett 17(5):651–654. https://doi.org/10.1029/GL017i005p00651
Mao X, Arnold D, Girardin V, Villiger A, Jäggi A (2021) Dynamic GPS-based LEO orbit determination with 1 cm precision using the Bernese GNSS software. Adv Space Res 67(2):788–805. https://doi.org/10.1016/j.asr.2020.10.012
Martini I, Susi M, Paonni, M, Sgammini, M, Fernandez-Hernandez I (2022) Satellite anomaly detection with PPP corrections: a case study with Galileo’s high accuracy service. In: Proceedinsg of the ION ITM 2022, pp 1246–1262. https://doi.org/10.33012/2022.18261
Montenbruck O, Ramos-Bosch P (2008) Precision real-time navigation of LEO satellites using global positioning system measurements. GPS Solut 12(3):187–198. https://doi.org/10.1007/s10291-007-0080-x
Montenbruck O, Steigenberger P (2022) BRD400DLR: DLR’s merged multi-GNSS broadcast ephemeris product in RINEX 4.00 format DLR/GSOC. https://doi.org/10.57677/BRD400DLR
Montenbruck O, Steigenberger P, Hauschild A (2018) Multi-GNSS signal-in-space range error assessment: methodology and results. Adv Space Res 61(12):3020–3038. https://doi.org/10.1016/j.asr.2018.03.041
Montenbruck O, Hackel S, Wermuth M, Zangerl F (2021) Sentinel-6A precise orbit determination using a combined GPS/Galileo receiver. J Geodesy 95(9):109. https://doi.org/10.1007/s00190-021-01563-z
Montenbruck O, Kunzi F, Hauschild A (2022) Performance assessment of GNSS-based real-time navigation for the Sentinel-6 spacecraft. GPS Solut 26(1):12. https://doi.org/10.1007/s10291-021-01198-9
Namie H, Kubo N (2020) Performance evaluation of centimeter-level augmentation positioning L6-CLAS/MADOCA at the beginning of official operation of QZSS. IEEJ J Ind Appl 10(1):27–35. https://doi.org/10.1541/ieejjia.20001080
Ogutcu S, Farhan HT (2022) Assessment of the GNSS PPP performance using ultra-rapid and rapid products from different analysis centres. Surv Rev 54(382):34–47. https://doi.org/10.1080/00396265.2020.1860869
Ray J, Coleman M (2017) RINEX extensions to handle clock information, version 3.04 8 July 2017. https://files.igs.org/pub/data/format/rinex_clock304.txt
Rebischung P, Schmid R (2016) IGS14/igs14.atx: a new framework for the IGS products. In: AGU fall meeting, G41A–0998
Romero I (ed) (2021) RINEX the receiver independent exchange format version 4.00, 1 Dec 2021
Schaer S (2016) SINEX BIAS—Solution (Software/technique) independent EXchange format for GNSS biases, version 1.00, 7 December 2016. https://files.igs.org/pub/data/format/sinex_bias_100.pdf
SMSC (2021) NAVSTAR GPS space segment/navigation user interfaces, IS-GPS-200, Rev. M, Space and Missile Systems Center, Los Angeles Airforce Base, 21 May 2021
Steigenberger P, Montenbruck O, Bradke M, Ramatschi M, Hessels U (2022) Evaluation of earth rotation parameters from modernized GNSS navigation messages. GPS Solutions 26(2):50. https://doi.org/10.1007/s10291-022-01232-4
Tegedor J, Ward J, Kazaz T, Spydevold I, Jones T, Giordano P (2022) Towards demonstration of real-time precise point positioning on-board norsat-TD. In: Proceedings of the NAVITEC 2022, 5–7 April 2022, ESA
Toral M, Stocklin F, Bar-Server Y, Young L, Rush J (2006) Extremely accurate on-orbit position accuracy using NASA’s tracking and data relay satellite system (TDRSS). In Proceedings of the 24th AIAA international communications satellite systems conference (ICSST), 2006–5312. https://doi.org/10.2514/6.2006-5312
Wang F, Gong X, Sang J, Zhang X (2015) A novel method for precise onboard real-time orbit determination with a standalone GPS receiver. Sensors 15(12):30403–30418. https://doi.org/10.3390/s151229805
Wang N, Yuan Y, Li Z, Montenbruck O, Tan B (2016) Determination of differential code biases with multi-GNSS observations. J Geodesy 90(3):209–228. https://doi.org/10.1007/s00190-015-0867-4
Wermuth M, Montenbruck O, van Helleputte T (2010) GPS high precision orbit determination software tools (GHOST). In: 4th international conference on astrodynamics tools and techniques; 3–6 May 2010, Madrid
Yunck TP, Bertiger WI, Wu SC, Bar-Sever YE, Christensen EJ, Haines BJ, Lichten SM, Muellerschoen RJ, Vigue Y, Willis P (1994) First assessment of GPS-based reduced dynamic orbit determination on TOPEX/Poseidon. Geophys Res Lett 21(7):541–544. https://doi.org/10.1029/94GL00010
Zhang W, Lou Y, Song W, Sun W, Zou X, Gong X (2022) Initial assessment of BDS-3 precise point positioning service on GEO B2b signal. Adv Space Res 69(1):690–700. https://doi.org/10.1016/j.asr.2021.09.006
Zumberge JF, Heflin MB, Jefferson DB, Watkins MB, Webb FH (1997) Precise point positioning for the efficient and robust analysis of GPS data from large networks. J Geophys Res 102(B3):5005–5017. https://doi.org/10.1029/96JB03860
Acknowledgements
The authors gratefully acknowledge the public provision of GNSS orbit, clock, and bias products, as well as earth rotation data used in this study through the International GNSS Service and its individual data centers, as well as the early sharing of Sentinel-6A GNSS observations through the Sentinel-6 Validation Team (S6VT).
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Hauschild, A., Montenbruck, O., Steigenberger, P. et al. Orbit determination of Sentinel-6A using the Galileo high accuracy service test signal. GPS Solut 26, 120 (2022). https://doi.org/10.1007/s10291-022-01312-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-022-01312-5