
Abstract
We develop tools for conservatively approximating the missed-detection probability of quadratic integrity monitors, commonly used for safety-critical navigation, for example, in the signal deformation monitor for global positioning system satellites. A derivation is presented that guarantees that a cylindrical overbounding approach conservatively approximates the true worst-case missed-detection probability for a quadratic monitor. A simulation study demonstrates that the cylindrical overbound is a relatively accurate bound, with mild overconservatism, within 5% of the correct answer for two-dimensional vector spaces with moderate-sized faults. Overconservatism increases somewhat for high-dimensional vector spaces and large fault-induced biases.





Similar content being viewed by others
References
Brown RG (1996) Receiver autonomous integrity monitoring. In: Parkinson BW, Spilker JJ (eds) Global positioning system: theory and applications, vol II. AIAA, Washington
Dautermann T, Mayer C, Antreich F, Konovaltsev A, Belabbas B, Kalberer U (2012) Non-Gaussian error modeling for GBAS integrity assessment. IEEE Trans Aerosp Electron Syst 48(1):693–706
Enge P (1999) Local area augmentation of GPS for precision approach of aircraft. Proc IEEE 87(1):111–132
Enge P, Walter T, Pullen S, Kee C, Chao Y-C, Tsai Y-J (1996) Wide area augmentation of the global positioning system. Proc IEEE 84(8):1063–1088
Houston T, Liu F, Brenner M (2011) Real-time detection of cross-correlation for a precision approach ground based augmentation system. In: Proceedings of the ION GNSS, Institute of Navigation, Portland, OR, USA, September 20–23, pp 3012–3025
Joerger M, Chan FC, Langel S, Pervan B (2012) RAIM detector and estimator design to minimize the integrity risk. In: Proceedings of the ION GNSS, Institute of Navigation, Nashville, TN, USA, September 17–21, pp 2785–2807
Khanafseh S, Pullen S, Warburton J (2012) Carrier phase ionospheric gradient ground monitor for GBAS with experimental validation. Navigation 59(1):51–60
Larson J, Gebre-Egziabher D (2016) Analysis and utilization of extreme value theory for conservative overbounding. In: Proceedings of the IEEE/ION PLANS. Institute of Navigation, April 11–14, Savannah, GA, pp 462–471
Lee Y (2004) Performance of receiver autonomous integrity monitoring (RAIM) in the presence of simultaneous multiple satellite faults. In: Proceedings of the ION AM, Institute of Navigation, Dayton, OH, USA, June 7–9, pp 687–697
Liu F, Brenner M, Tang CY (2006) Signal deformation monitoring scheme implemented in a prototype local area augmentation system ground installation. In: Proceedings of the ION GNSS, Institute of Navigation, Fort Worth, TX, USA, September 26–29, pp 367–380
Ludeman LC (2003) Random processes: filtering, estimation, and detection. John Wiley & Sons Inc, Hoboken
Mitelman A (2004) Chapter 3: geometrical analysis of the SV19 anomaly. Signal quality monitoring for GPS augmentation systems. Dissertation, Stanford University
Murphy T, Imrich T (2008) Implementation and operational use of ground-based augmentation systems (GBASs)—a component of the future air traffic management system. Proc IEEE 96(12):1936–1957
Ober P, Imparato D, Verhagen S, Tiberius C, Christian HV, Van Kleef A, Wokke F, Bos A, Mieremet A (2014) Empirical integrity verification of GNSS and SBAS based on the extreme value theory. Navigation 61(1):23–38
Osechas O, Misra P, Rife J (2012) Carrier-phase acceleration RAIM for GNSS satellite clock fault detection. Navigation 59(3):221–235
Pervan B, Pullen S, Sayim I (2000) Sigma estimation, inflation, and monitoring in the LAAS ground system. In: Proceedings of the ION GPS, Institute of Navigation, Salt Lake City, UT, USA, September 19–22, pp 1234–1244
Phelts RE, Walter T, Enge P (2003) Toward real-time SQM for WAAS: improved detection techniques. In: Proceedings of the ION GNSS, Institute of Navigation, Portland, OR, USA, September 9–12, pp 2739–2749
Pullen S, Rife J (2009) Differential GNSS: accuracy and integrity. In: Gleason S, Gebre-Egziabher D (eds) GNSS applications and methods. Artech House, Norwood, pp 87–120
Pullen S, Gao G, Tedeschi C, Warburton J (2012) The impact of uninformed RF interference on GBAS and potential mitigations. In: Proceedings of the ION ITM, Institute of Navigation, Newport Beach, CA, USA, January 30–February 1, pp 780–789
Reuter R, Weed D, Brenner M (2012) Ionosphere gradient detection for Cat III GBAS. In: Proceedings of the ION GNSS, Institute of Navigation, Nashville, TN, USA, September 17–21, pp 2175–2183
Rife JH (2012) Overbounding missed-detection probability for a Chi square monitor. In: Proceedings of the ION GNSS, Institute of Navigation, Nashville, TN, USA, September 17–21, pp 1348–1368
Rife JH (2013) The effect of uncertain covariance on a Chi square integrity monitor. Navigation 60(4):291–303
Rife JH (2015) Comparing performance bounds for Chi square monitors with parameter uncertainty. IEEE Trans Aerosp Electron Syst 51(3):2379–2389
Rife JH (2016) Overbounding false-alarm probability for a Chi square monitor with natural biases. Navigation 63(4):453–464
Rife JH (2017a) Robust Chi square monitor performance with noise covariance of unknown aspect-ratio. Navigation 64(3):377–389
Rife JH (2017b) Derivation of spherical overbounding for quadratic integrity monitors with non-Gaussian random inputs. In: Proceedings of the ION GNSS, Institute of Navigation, Portland, OR, USA, September 27–28, pp 2467–2476
Rife JH (2017c) Overbounding risk for quadratic monitors with arbitrary noise distributions. (Submitted to: IEEE Trans Aerospace and Electronic Systems)
Rife JH, Parker JS (2017a) Geometric approximations of heavy-tail effects for Chi square integrity monitors. In: Proceedings of the ION GNSS, Institute of Navigation, Monterey, CA, USA, January 30–February 1, pp 536–561
Rife JH, Parker JS (2017b) Comparing geometric approximations of heavy-tail effects for Chi square integrity monitors. (Submitted to: Navigation)
Rife JH, Schuldt DW (2014) Minimum volume ellipsoid scaled to contain a tangent sphere, with application to RAIM. In: Proceedings of the IEEE/ION PLANS, Institute of Navigation, Monterey, CA, USA, May 5–8, pp 324–333
Acknowledgements
The author gratefully acknowledges the Federal Aviation Administration GBAS Program (DTFACT-15-C-00033) for supporting this research. The opinions discussed here are those of the author and do not necessarily represent those of the FAA or other affiliated agencies.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Example warping function
The idea of transforming, or warping, one distribution into another distribution is a well-understood concept in probability theory. Warping can be used, for example, to convert a set of samples created by a uniform random number generator into a set of samples characterized by an entirely different PDF, such as a χ 2 PDF.
A useful principle in converting one distribution to another is to match their CDFs (Ludeman 2003). The matching process integrates two PDFs to obtain CDFs and finds the arguments that result in matching probabilities. For example, consider a pair of two-dimensional, spherically symmetric PDFs: an exponential PDF \(p_{e} \left( {\mathbf{x}} \right)\) and a Gaussian PDF \(p_{g} \left( {\mathbf{y}} \right)\).
Here, the parameter L is the scaling parameter for the exponential distribution, and the parameter σ is the standard deviation of the Gaussian distribution. After converting to polar coordinates with r e the radius for the exponential and r g the radius for the Gaussian, both PDFs can be decomposed into a product of a uniform marginal PDF, \(p\left( \theta \right) = \tfrac{1}{2\pi }\), and a radial conditional PDF, either p e(r e|θ) or p g(r g|θ), where
Integrating both radial conditionals against the radial element of integration in two dimensions gives a probability per unit angle. Now integrate the exponential PDF to a limit R, and integrate the Gaussian PDF to a limit f(R), such that the two integrated probabilities per unit angle are equal.
In the special case of this example, both integrals are analytic, and the above equation can be integrated to give
Solving for f(R) results in the warping function:
This warping function (31) is illustrated in Fig. 6, as the curve labeled N = 2.

Converting the radial limit for an exponential CDF into an equivalent radial limit for a Gaussian CDF. Different warping functions are shown for spatial dimensions of N = {1,2,4,8}. The dashed reference line is the identity warping function, which maps a Gaussian CDF to itself
Although the derivation of this warping function f(R) was purposefully conducted in two dimensions to ensure the warping function was analytic, a similar warping function can be generated in higher dimensions as well. For instance, in three dimensions, the conditional CDF balance is
Evaluating both sides to obtain the 3D analogy to (30) gives
It is not possible to solve Eq. (33) to obtain an analytic solution for f(R), so instead it is necessary to use an interpolation process to relate f(R) to R. Because an analytic form is not feasible, it is preferable to integrate (5) numerically, particularly in higher dimensions, where the analogy to (30) and (33) is expansive. The numeric approach, moreover, works on any distribution, so that other candidate distributions can easily be substituted for p e when a numerical solution is applied.
For the sake of comparison, a numerical solution was used to obtain the warping function f(R) relating the exponential distribution to the Gaussian distribution for dimensions up to N = 8. A subset of these warping functions is illustrated in Fig. 6, as the curves labeled N = 1 through N = 8. In the figure, the dashed reference line indicates the identity warping function that relates a Gaussian CDF to itself. Not surprisingly, the family of exponential warping functions is all below the reference line, indicating the exponential CDF’s heavy tails.
Appendix 2: Monotonicity of warped radius
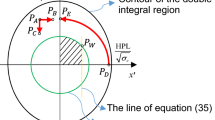
This section provides a proof that the warped radius increases monotonically for angles moving toward ϕ 1 = ϕ * along the inner threshold surface and for angles moving away from ϕ 1 = ϕ * along the outer threshold surface.
Lemma
Consider the surface Λ w created by warping a hypersphere with radius \(\sqrt T\), with center displaced from the origin by b, and with \(b > \sqrt T\). The derivative of the warped inner radius f(R i )with respect to ϕ 1 is positive, and the derivative of the warped outer radius \(\bar{f}(R_{o} )\) with respect to ϕ 1 is negative. In other words,
Proof
Consider the triangle geometry shown in Fig. 1 (top). From the law of cosines:
The ray at any angle ϕ 1 ≤ ϕ * intersects the bounding sphere (dashed contour in Fig. 1, top) at two locations. These locations can be obtained by solving the above quadratic equation for R and labeling the two solutions R i and R o , corresponding to the distances to the inner and outer intersections points, respectively. Equations for both solutions are given by (11). Equations (11) can be rewritten slightly by substituting (9) to give:
The limiting angle ϕ 1 = ϕ * is a special case where the two intersection points converge to the same location, such that R i = R o . For small perturbations ɛ from the critical angle, such that ϕ 1 = ϕ * + ɛ, the small angle approximation for (36) is
For any small perturbation ɛ → 0, noting that the sine and cosine terms are positive on the range of possible ϕ * values, it can be concluded by inspection that
To analyze larger perturbations from the critical angle ϕ *, take the derivative of (35) with respect to ϕ 1 for fixed b and T:
Rearranging terms, it is possible to show that
Substituting (36) into (40), gives
and
The denominator of (41) diverges at the critical angle ϕ 1 = ϕ *, but we have already analyzed the derivative at the critical angle using the small perturbation analysis to obtain (38). For angles other than the critical angle, on the domain \(0 \le \phi_{1} < \phi_{*} < \tfrac{1}{2}\pi\), Eq. (41) must be positive because sin ϕ 1 is positive, sin 2 ϕ * > sin 2 ϕ 1, and R i is everywhere positive. If (41) is everywhere positive then (42) must be everywhere negative on the domain away from ϕ 1 = ϕ *,
Now consider the derivatives of the warping functions f(R i ) and \(\bar{f}(R_{o} )\). Using the product rule,
The functions f(R i ) and \(\bar{f}(R_{o} )\) increase monotonically with their respective arguments, since the warping functions are compound functions of two monotonically increasing functions: a CDF and an inverse CDF. Hence the derivatives of the warping functions in (44) with respect to their own arguments are positive. Thus, the derivatives in (44) match the sign of the derivatives of the radii with respect to ϕ 1, which according to (38) and (43) imply that on the domain \(0 \le \phi_{1} \le \phi_{*} < \tfrac{1}{2}\pi\),
QED
Rights and permissions
About this article

Cite this article
Rife, J.H. Cylindrical overbounding for quadratic integrity monitors with non-Gaussian inputs. GPS Solut 22, 27 (2018). https://doi.org/10.1007/s10291-017-0692-8
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10291-017-0692-8