
Abstract
We present a multi-constellation multi-band GNSS software receiver front end based on USRP2, a general purpose radio platform. When integrated with appropriate daughter boards, the USRP2 can be used to collect raw intermediate frequency (IF) data covering the entire GNSS family of signals. In this study, C++ class-based software receiver processing functions were developed to process the IF data for GPS L1, L2C, and L5 and GLONASS L1 and L2 signals collected by the USRP2 front end. The front end performance is evaluated against the outputs of a high end custom front end driven by the same local oscillator and two commercial receivers, all using the same real signal sources. The results show that for GPS signals, the USRP2 front end typically generates carrier-to-noise ratio (C/N 0) at 1–3 and 1–2 dB below that of the high end front end and a NovAtel receiver, respectively. For GLONASS signals, the USRP2 C/N 0 outputs are comparable to those of a Septentrio receiver. The carrier phase noise from the USRP2 outputs is similar to those of the benchmarking devices. These results demonstrate that the USRP2 is a suitable front end for applications, such as ionosphere scintillation studies.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
A typical global navigation satellite systems (GNSS) receiver is composed of three major functional components: radio frequency (RF) front end, receiver signal processing, and navigation signal processing. The RF front end filters and amplifies the input RF signal and down-converts it to an intermediate frequency (IF) before an analog-to-digital converter (ADC) samples the signal for further processing. The RF front end is traditionally implemented in analog circuits. The receiver signal processing unit demodulates the signal to extract range and carrier phase measurements and navigation data messages that will be combined in the navigation signal processing stage to generate position, velocity, and timing solutions. A software-based GNSS receiver performs the demodulation function through software implementations on general purpose processors or FPGAs, while the traditional hardware-based receiver processing implements its functions on application specifics integrated circuits (ASIC). Compared to the hardware-based receivers, a software-based receiver offers more flexibility and allows more complicated algorithm implementations. As a result, software-defined GNSS receivers have gained much attention from both research and development communities in recent years (Akos 1997; Tsui 2004; Morton 2007). The focus is the realization and performance evaluation of a flexible GNSS receiver RF front end using a general purpose universal software radio peripheral (USRP) device for ionosphere scintillation data collection.
USRP is a low-IF architecture radio designed to allow general purpose computers or digital signal processors (DSP) to function as high bandwidth communication devices. In recent years, the low-IF architecture has gained much attention due to the demand for integratable and flexible wideband low-cost receiver platforms that enable developers to build a wide range of communication systems with minimum cost and effort. With a maximum sampling frequency of 50 MHz and operating frequencies ranging from DC to 5.9 GHz, a properly configured USRP2 is capable of capturing all L band GNSS signals. Additionally, the device is equipped with a flexible data and control interface through a gigabit Ethernet port, making it ideal for field data collection and remote monitoring applications.
The USRP2-based GNSS RF front end is a very attractive option as we enter a new era of satellite-based navigation with the recent GPS modernization that includes L2C, L5, and the planned L1C signals (Braschak et al. 2010), the increasing number of Russian’s GLONASS satellites and reformed signals (Revnivykh 2010), the emergence of European’s Galileo (Hein et al. 2005) and China’s Compass constellations (Cao et al. 2008), and a multitude of regional and spaced-based augmentation systems. The multi-constellation systems offer diverse signal structures over a wide span of frequencies and improve the spatial coverage at nearly every geographical location on the surface and in the near space of the Earth. In addition to enhanced continuity, availability, and integrity of navigation and timing solutions, the system will enable unprecedented scientific research of the dynamic atmosphere on a global scale.
The USRP2-based software receiver presented is for the latter purpose. Specifically, we aim to establish an array of GNSS receivers at locations where GNSS signals traversing the ionosphere frequently experience scintillation. Existing deployment of ionosphere scintillation monitoring systems is limited to single-frequency GPS receivers or at most dual-frequency GPS receivers operating at the L1 and L2 bands (Groves et al. 2000; van Dierendonck et al. 1993, 2004; Skone et al. 2008; O’ Hanlon et al. 2011). The USRP2-based software receiver offers many advantages over these systems. First, GPS satellites have limited coverage at the high-latitude regions where scintillations frequently occur. GNSS satellites such as those in the GLONASS offer more high-latitude coverage and can be used to fill the GPS void (Wang et al. 2011). Second, the sheer number of combined satellites in all available constellations will increase the spatial resolution of the ionosphere tomography derived from a fixed size ground-based GNSS receiver array. Third, no field study has been conducted on the effect of ionosphere scintillation on the new GPS L5, GLONASS, Galileo, and Compass satellite signals. There is an urgent need to gain an understanding of the spatial correlation among the satellites and the frequency correlation among different signals under ionosphere scintillations (Seo et al. 2009, 2011; El-Arini et al. 2009). The USRP2 offers a flexible and reconfigurable platform for these studies. In our first phase of investigation, we have successfully developed and implemented software that controls the data collection system (Peng et al. 2010). A user can specify the USRP2 front end center frequency, receiver sampling frequency, and output data format through a software user interface. A first in first out (FIFO) buffer is allocated to store the incoming IF data. The data collection system and control software have been successfully tested and collected GPS L1, L2, and L5 and GLONASS L1 and L2 signals (Peng et al. 2010).
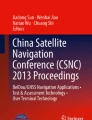
A common antenna and local oscillator are shared among several receivers in two configurations, as shown in Fig. 1, to evaluate the USRP2 front end performance for GPS (switch position 1) and GLONASS (switch position 2) signals, respectively. In switch position 1 configuration, a custom instrumentation quality three-frequency GPS receiver RF front end data collection system TRIGR (Gunawardena et al. 2008), a NovAtel Propak dual-frequency (GPS L1 and legacy L2 signal) receiver, and two USRP2 front ends split inputs from the same Novatel GPS-703-GGG wideband antenna. A low-noise OCXO clock is used to drive the TRIGR and two USRP2 RF front ends. The same receiver processing algorithms are applied to the collected GPS L1, L2C, and L5 data by the USRP2 and TRIGR front end. The NovAtel receiver is used to verify the GPS L1 signal processing results as it is not capable of processing the new L2C and L5 signals and the GLONASS signals. In switch position 2 configuration, a Septentrio PolaRxS receiver and two USRP2 front ends are tuned to collect GLONASS L1 and L2 signals, respectively. Our custom developed receiver signal processing algorithms are used to process the USRP2 IF samples, while the Septentrio PolaRxS receiver tracking outputs for GLONASS L1 and L2 are generated using proprietary software. The receiver processing results from these two configurations are presented and analyzed to evaluate the performance of the USRP2 front end.

RF data collection setup at Miami University for USRP2 performance evaluation of GPS L1, L2, and L5 (switch position 1) GLONASS L1 and L2 (switch position 2) processing
“USRP RF front end architecture” section presents the USRP2 RF front end architecture. “Data collection system setup and receiver tracking algorithm” section discusses the data collection system setup and software receiver signal processing algorithms. “Ionosphere scintillation receiver performance requirements” section provides USRP2 performance evaluation results as compared to the TRIGR front end and the commercial receivers. “USRP2 performance analysis” section summaries the results.
USRP RF front end architecture
USRP is based on the low-IF receiver architecture that is a hybrid combination of the traditional superheterodyne analog complex down-conversion architecture and the more recent digital domain down-conversion technology. The low-IF receiver architecture overcomes some of the well-known issues associated with the superheterodyne and direct complex baseband down-conversion techniques. For example, in the superheterodyne architecture as shown in Fig. 2, the incoming signal is first filtered by a channel selective band pass filter (BPF1) and amplified by a low-noise amplifier (LNA) and then further filtered by an image rejection filter (BPF2). The image rejection filter is typically implemented using expensive and bulky surface acoustic wave (SAW) devices. Multiple down-conversion stages with successively decreasing IF values are typically implemented to ensure the effective reduction of the mirror interference using narrow bandwidth filters. While the superheterodyne architecture has superior performance, the need for the image rejection filter and multi-stage implementation results in relative high cost, large RF front end size, and high power consumption (Abidi 1995; Razavi 1997).

Block diagram of a one-stage superheterodyne receiver front end
These drawbacks are overcome by the complex down-conversion architecture as shown in Fig. 3. Unlike the real down-conversion in the superheterodyne receiver architecture where the signal spectrum shifts toward both high and low frequencies, the complex mixer shifts the incoming signal spectrum in one direction only. As a result, there is no image folding, and therefore, no image rejection filter is needed. The BPF or LPF following the mixers are centered at the baseband to filter out-of-band signals. There are several well-documented drawbacks with direct down-conversion, such as DC offset, I/Q mismatch, and even-order distortion (Razavi 1997). Among them, the DC offset caused by LO leakage reflected from the front end circuit, the antenna, and the receiver external environment is the most serious one. It may lead to saturation of the subsequent circuits (Crols et al. 1995). Methods have been developed to reduce DC offset to some extend (Crols et al. 1995; Rudell 1997).

Direct complex down-conversion architecture
The low-IF architecture as shown in Fig. 4 effectively lessens the DC offset by having an LO frequency that is different from the RF frequency. The first stage is the traditional complex mixer similar to that of the complex direct down-conversion scheme. It translates the RF signal to a low IF that is less than half of ADC sampling frequency. The BPFs after the mixer are centered at the IF to filter out unwanted signals. The second stage is used to further down-covert the low-IF signal to zero center frequency in the digital domain and suppresses the image interference. Similar to the complex direct down-conversion, filtering of the unwanted interferes can be implemented at the low-IF frequency. As a result, the structures of the filter components are simplified. In the mean time, the signal is down-converted to low IF instead of zero frequency as in the direct down-conversion receiver, so the problem of DC offset is avoided in the low-IF receiver. This architecture, however, still suffers the I/Q mismatch problem, and extra computation is needed in the digital complex mixer (Crols et al. 1998). The performance of the low-IF receiver is still not as good as that of the superheterodyne receiver, but its flexibility, ease of integration, and low cost make it an attractive option in research communities. It is for these reasons that we select a USRP product that is based on the low-IF architecture as our GNSS receiver front end.

Low-IF receiver architecture
We used the second generation of the USRP, the USRP2, in this project. Compared to the first-generation product, USRP2 offers higher speed, better performance, and increased flexibility. At the heart of a USRP2 is a FPGA that processes complex waveforms at high sampling rates. It is also equipped with high-speed and high-precision ADCs and DACs for wideband signal processing and conditioning. With a maximum sampling frequency of 25 MHz for both in-phase and quadrature components and a gigabit Ethernet interface, the USRP2 is suitable for collecting raw IF data for all existing and future wideband GNSS signals. A Multiple-Input-Multiple-Output (MIMO) system can be built by synchronizing several USRP2 boards with a common pulse per second (PPS) timing control.
Several daughter boards are available to perform signal conditioning and tuning of the RF inputs to the desired baseband frequency before the processed signal is input to the USRP2 motherboard. Table 1 lists the available daughter boards that can be used for navigation satellite signal processing. The DBSRX covers the full range of the L band navigation signals. It also provides an adjustable RF bandwidth between 4 and 33 MHz, thus making it suitable for processing most GNSS signals. The RFX1200 covers the GPS L2 and L5 and GLONASS L2 band, while RFX1800 covers GPS and GLONASS L1 band.
Figure 5 shows an example GNSS signal path schematics on a USRP2 RF front end with a DBSRX daughter board. The RFX boards have similar components and functionality as that of the DBSRX. The main difference is the replacement of the MAX2118 by ANALOG DEVICES AD8347 chip that performs similar signal processing tasks as that of the MAX2118. The AD8347 has a maximum noise figure of 11 dB, while the MAX2118 noise figure is between 10 and 11.5 dB, depending on the environment temperature. Both AD8347 and MAX2118 provide adjustable pass band bandwidth. The AD8347 is driven by an external oscillator, while the MAX2118 has an integrated local oscillator.

GNSS signal path schematics on the RF front end circuit
The core of the USRP2 board is the FPGA that performs the high sampling rate data processing. The standard FPGA configuration in the receiver signal path includes a complex multiplier that down-converts the baseband signal to zero center frequency, a decimator that down-samples the signal by a factor of K, and half-bandwidth LPFs that further reduce the input spectral bandwidth by half. The onboard numerically controlled oscillator (NCO) is responsible for generating the digital sinusoid used by the complex multiplier. The decimators are implemented using a four-stage cascaded integrator-comb (CIC) filter. Figure 6 shows the schematics of the CIC implementation. The computationally efficient CIC filter is implemented using adders and delays and is widely used in decimation and interpolation (Hogenauer 1981). A 31-tap half-bandwidth filter for spectral shaping and out-of-band signal rejection is cascaded with the CIC decimator to form a complete multi-rate digital down-conversion stage.

Four-stage cascaded integrator-comb (CIC) filter implementation architecture
The transmit circuit of the USRP2 is the reverse of that of the receiver. A digital up-converter that consists of a CIC interpolator, mixer, and NCO is implemented in the FPGA. A major problem with the USRP2 is that its on-board oscillator is not stable in terms of frequency and phase. The temperature stability of the TCXO on the RFX board is about 2.5 ppm which would cause a frequency offset about 4,000 Hz (2.5e−6 × 1.57e9) at GPS L1 band, and this offset is beyond the lock in range of the carrier tracking loop. One solution to this problem is to use a high-quality external oscillator. A small Wenzel 10-MHz OCXO oscillator is used as an external clock in our experiments. This oscillator has a specified temperature stability of 0.0015–0.005 ppm and a reasonably low phase noise at 10 MHz. The OCXO can reduce the frequency offset of the carrier to the level of few hertz. In the following section, we describe the detailed data collection system setup and receiver signal processing algorithms used to track the GNSS signals for USRP2 performance evaluations.
Data collection system setup and receiver tracking algorithm
Two experimental setup configurations as shown in Fig. 1 are used to collect data to evaluate the performance of the USRP2 as a flexible GNSS RF front end. The first configuration aims to collect GPS L1, L2, and L5 data, while the second configuration is used to collect GLONASS L1 and L2 signals. In both configurations, a NovAtel GPS-703-GGG wideband antenna is used to intercept signals for all of the receivers in each setup, and a common low-noise OCXO oscillator provides timing signal to drive the three RF front ends. In the first configuration (switch at position 1), the antenna output passes a 4-way splitter to a TRIGR front end, a NovAtel OEM4 dual-frequency receiver, and two USRP2 front ends. The TRIGR is a wideband instrumentation quality RF front end built at the Ohio University Avionics Engineering Center (Gunawardena et al. 2008). It has four channels: two GPS L1 s, one L2, and one L5. Each of the TRIGR front end channel has a fixed sampling frequency of 56.32 MHz and IF frequency at 13.68 MHz with configurable bit resolution at 2, 4, 8, and 16. In our experiment, we select the 8-bit resolution option. The NovAtel receiver is used as an additional reference to verify the acquisition and tracking results of GPS L1 signals generated by the USRP2 front end. The USRP2 sampling frequency is set to 5 MHz, and bit resolution is 16 bits for the narrowband GPS L1 and L2C signals. For the wideband GPS L5 and GLONASS L1 and L2 signals, the USRP2 sampling frequency is 20 MHz, and bit resolution is 1 bit.
In the second configuration, the same antenna is connected through a 2-way splitter to two USRP front ends and a Septentrio PolaRxS receiver. This configuration is used to validate the GLONASS data collection and signal quality from the USRP2 front end against the commercial receiver outputs. Two daughter boards were used in the USRP2 data collection experiments: RFX1200 for GPS L2 and L5 and GLONASS L2, and RFX1800 for GPS L1 and GLONASS L1. Although the DBSRX board offers coverage of all GNSS signal spectrum, it has suboptimal performance compared to the RFX series (Peng et al. 2010). Therefore, it is not used in this study.
The ultimate performance evaluation for the USRP2 front end as an ionosphere scintillation monitoring device is the GNSS signal observables, such as the carrier-to-noise ratio (C/N 0) and carrier phase noise (van Dierendonck 2005). A complete suite of C++-based postprocessing algorithms has been developed to acquire and track GPS L1, L2C, L5, and GLONASS L1 and L2 signals. Acquisition of GPS signals is initiated with a FFT-based two-dimensional search of the L1 signal CA code phase and carrier Doppler frequencies (Tsui 2004). As three GPS channels (L1, L2C, and L5) are synchronized in the TRIGR front end, the L1 C/A code phase is used to initialize tracking for L2C (CM, CL) and L5(I, Q). The initial Doppler shift frequencies for L2C and L5 are derived from the Doppler shift frequency of L1. The acquisitions of GPS L1, L2C, and L5 signals from the IF data collected by USRP2 are done separately with 10 ms of coherent integration as signals from two USRP2 boards are not synchronized in the experiments.
A conventional GPS signal tracking algorithm, as shown in Fig. 7, is used to generate the signal observables needed for USRP2 front end performance evaluations. The tracking algorithm consists of a carrier lock loop that tracks the carrier frequency and phase and a code delay lock loop (DLL) that tracks the PRN code phase. The incoming signal is first mixed with two locally generated orthogonal sinusoids. The mixing results are then integrated and sent to the discriminator. The output of the discriminator is filtered and used as the input of the NCO to update the local carrier center frequency (Misra et al. 2006; van Dierendonck 1996). The carrier tracking loop is initialized by a Frequency Lock Loop (FLL). After the carrier is locked, the FLL transitions to the Costas PLL. An early-prompt-late DLL with a half chip correlator spacing is used in the software receiver for the code tracking. The coherent integration time used in the correlators of the tracking loops is 1 ms. The noise bandwidths of the loop filters are 5 Hz for the FLL, 10 Hz for the PLL, and 2 Hz for the DLL. The discriminators used for the FLL, PLL, and DLL are listed below:

Block diagram of software receiver tracking loops
Unlike the GPS signals that use code division multiple access (CDMA) modulations, the GLONASS signals use frequency division multiple access (FDMA) modulation, where each satellite transmits its carrier signal on its own sub-band with 562.5-kHz frequency offset on L1 and 437.5-kHz frequency offset on L2 (GLONASS ICD 2002):
Both GLONASS L1 and L2 sub-carriers are modulated by a modulo-2 addition of a common PRN code for all carriers with 511-K chipping rate and 1-ms period, 50-bps navigation data bits, and a 100-bps meander code. The acquisition and tracking algorithms of the GLONASS L1 and L2 signals are similar to that of the GPS signals. The only difference is that different center frequencies are used for the tracking loop for different channels.
Ionosphere scintillation receiver performance requirements
The purpose of this work is to examine whether the USRP2 front end is suitable for collecting GPS and GLONASS data for ionosphere scintillation studies. Ionosphere scintillations cause carrier phase fluctuation and signal amplitude fading. A suitable receiver for ionosphere scintillation studies need to be able to minimize or limit thermal noise, local oscillator phase noise, and out-of-band interference contributions to the carrier phase and signal intensity measurements. Failure to understand the limitation of the instrument may lead to misleading scintillation results (van Dierendonck 2005). The important qualities of a typical receiver for scintillation studies are the following: (1) the clock phase noise of the RF front end, (2) the receiver noise figure, and (3) the performance of the carrier tracking loop.
It is difficult to separate the clock phase noise caused by the RF front from the fluctuations caused by phase scintillation. The clock phase noise of a RF front end mainly consists of contributions from the reference oscillator, the voltage-controlled oscillator (VCO), and frequency synthesizers. The magnitude of the phase noise of a TCXO is much larger than typical weak phase scintillation effects, while the phase noise of an OCXO can be smaller than the scintillation effects. A practical way to estimate the GPS carrier phase fluctuation caused by the oscillator, and the VCO is to measure the detrended phase output of the receiver. Fremouw et al. (1978) reported weak phase scintillations with magnitude around 0.086 radians. Recent studies of high-latitude scintillations have shown many scintillation activities with phase scintillations with magnitude in similar or even smaller values (Vikram 2011). In order to detect weak scintillation events, the reference oscillator, the VCO, and associated frequency synthesizer generated phase noise needs to be minimized.
The noise figure of the receiver is another important quality of a scintillation receiver. A large noise figure will result in degraded C/N 0 performance and less accuracy in signal intensity measurements. At the L band, strong scintillations may cause deep amplitude fading (>20 dB) associated with rapid phase changes (Humphreys et al. 2010a; Zhang et al. 2010). Such signal dynamics causes cycle slips or even loss lock of the carrier tracking loop (Humphreys et al. 2010b). A GPS receiver with low-noise figure can help to improve the tracking loop stability during strong scintillation events and reduce the phase error cause by the carrier tracking loop since the phase noise standard deviation caused by a PLL is related to C/N 0 by (Kaplan et al. 2005):
where B N is the PLL loop noise bandwidth, T is the coherent integration time, and C/N 0 is the carrier-to-noise ratio. Quantitative analysis of USRP2 front end noise figure and the phase noise is presented in a later section.
Robust tracking loop design is needed to maintain tracking of the signal during deep amplitude fading. Several software-based receiver algorithms have been developed to achieve this purpose. Extended integration time, other adaptive approaches with adjustable tracking loop parameters, and a pure PLL/FLL are used to enhance the sensitivity of the receivers. A pure PLL/FLL can track the signals with an additional 6-dB gain compared to the conventional PLL/FLL (Kaplan et al. 2005). For dataless pilot signals such as L2CL and L5Q signals, the pure PLL/FLL approach can be implemented for real-time applications. For applications only requiring postprocessing, navigation messages can be decoded in advance and removed from the data-modulated signals before a pure PLL/FLL can be applied. Vector-based tracking loops make use of information from healthy satellites to assist the tracking of satellite signals experiencing scintillation, significantly improve the tracking loop performance. An extended Kalman filter-based vector tracking loop has been developed (Peng et al. 2012) and tested with strong scintillation data collected during last solar maximum (Zhang et al. 2010).
USRP2 performance analysis
A quick time series analysis of the USRP2 outputs is presented here to demonstrate the basic validity of its measurements. It is commonly accepted that the output of a properly designed and constructed RF front with antenna disconnected should be normally distributed. Figure 8 shows the sample distribution of USRP2 output is well fitted with an ideal zero mean Gaussian distribution.

Distribution of the USRP2 outputs of the GPS L1 signals
To further verify the randomness of the RF data, the collected data sample autocorrelation coefficients are calculated:
where x t represents the output samples, k is the lag between samples, and N = 106 is the total number of samples. Figure 9 shows the plot of the first 100 correlation coefficients. Small correlations exist at various lags which indicate that the RF data are not completely random.

Autocorrelation of the USRP2 outputs
The GPS L1 signal spectrum from outputs of the USRP2 and the TRIGR front end collected using the setup in Fig. 1 are shown in Fig. 10. The small peak at the center is the result of all combined visible satellite GPS L1 C/A code energy. The spectrum of the USRP2 is not as clean as that of the TRIGR front end. The spectral spikes contained in the USRP2 outputs may result in degraded performance. Performance comparisons will be presented at a later section.

IF spectrum of the USRP2 (left) and TRIGR (right) outputs of the GPS L1 signals
For this study, our performance evaluations are focused on the C/N 0 and carrier phase measurements. As only two USRP2 boards were available during the data collection experiments, the triple frequency GPS RF data were collected at two different time intervals, each lasting 6 min. The L2C and L5 data were simultaneously collected by the two USRP2 boards and the TRIGR front end on 1/13/2011, 20:22:00 EST. The GPS L1 data were collected on 3/31/2011 at 11:37:42 EST by one USRP2, the TRIGR front end, and the NovAtel receiver. For GLONASS data collection, two USRP2s and a Septentrio PolaRxS receiver collected GLONASS L1 and L2 on 1/15/2011 at 22:07:39 EST. Figure 11 shows the satellite sky plots during the GPS L1 and GLONASS L1 and L2 data collection. The following subsections discuss the performance evaluations based on these measurements.

Satellite path sky plots at Oxford, Ohio during data collection experiments. a GPS Sky plot (1/13/2011, 20:22:00 EST) b GLONASS Sky plot (1/15/2011, 22:07:39 EST)
C/N 0 measurement performance
The following equations are used to compute the C/N 0 using the I and Q channel correlator outputs for the USRP2 and TRIGR front end (van Dierendonck et al. 1996):
where WBP and NBP are the so-called wideband and narrowband signal power measurements, respectively, and T is the correlator integration time. In this work, we used T = 1 ms, M = 20, and K = 50 in our calculations. We compared the performance of the USRP2 for all eleven satellites in view with the NovAtel receiver outputs and the TRIGR front end during the same experiment time period. The average and standard deviations of the L1 signal C/N 0 values for the eleven satellites during the 6-min data collection period are plotted in Fig. 12. The results show that USRP2 C/N 0 is typically about 1–2 and 1–3 dB lower than that of the NovAtel receiver and the TRIGR front end, respectively. The C/N 0 standard deviations from USRP2, TRIGR, and NovAtel are comparable within a fraction of a dB. The standard deviations of the NovAtel receiver are slightly less than the two RF front end outputs as different tracking algorithms and filter parameters may be used in the NovAtel receiver. We can also see that satellites with low elevation angles, such as PRN 3 and 5, have larger amplitude fluctuations, while satellites with high elevations, such as PRN 15 and 21, have larger C/N 0 and smaller standard deviation, as expected. The software receiver processing results of GPS L2CM and L5I from USRP2 and TRIGR front end are plotted in Fig. 13. PRN 25 was the only satellite broadcasting L5 signals during the data collection time. We can also see that USRP2 C/N 0 is typically about 1–3 dB lower than that of the TRIGR front end.

Average and standard deviations of GPS L1 signal C/N 0 from USRP2, TRIGR front end, and NovAtel receiver for all GPS satellites in view during a 6-min experiment

Average and standard deviations of GPS L2 and L5 signal C/N 0 from USRP2 and a Novatel receiver
Figure 14 compares the average GLONASS L1 and L2 C/N 0 values obtained using the USRP2 and Septentrio PolaRxS over 6 min taken on January 15, 2011, starting at 22:07:39EST. With the exception of channel-4 that is ruled as unhealthy during the data collection experiment and hence was not tracked by the PolaRxS, both receivers show comparable measures at both L1 and L2 for all remaining 9 SVs. The results also show that the C/N 0 standard deviations are also of comparable values for both receivers.

Average and standard deviation of C/N 0 generated from USRP2 and Septentrio PolaRxS for GLONASS L1 and L2
Carrier phase measurements
Carrier phase fluctuation is another important measure of ionosphere scintillation. When there is no scintillation, the output of the carrier phase tracking loop for a receiver with a low-phase-noise OCXO clock on a stationary platform is dominated by the satellite-receiver Doppler frequency and Doppler rate (Razavi et al. 2008), which can be adequately represented by a fourth-order polynomial (Peng et al. 2010). The remaining high-frequency components of the phase variations are due to RF front end noise and possible RF interferences. These components are the limiting factors in the receiver’s ability to detect ionosphere scintillations, if the low-frequency components can be effectively removed. The conventional approaches include a fourth-order polynomial fitting and a sixth-order Butterworth filter to remove the satellite-receiver dynamics and other slowly changing errors. Differencing between two signals from different band (such as L1 and L2) of the same satellite can also remove satellite-receiver dynamics and oscillator effects (Wang et al. 2012), if the same front end is used to collect and process both signals. In our experiment, two separate USRP2s are used to collect L1 and L2 signals, and the L5 signal is collected at a different time. Therefore, this option is not applicable. A sixth-order Butterworth high pass filter with 0.1-Hz cutoff frequency has been used in (van Dierendonck et al. 1996) for detrending of the 50-Hz phase outputs, while a fifteenth-order Butterworth filter with 0.1-Hz cutoff frequency has been used in (Zhang et al. 2010) for 1,000-Hz phase outputs. The filter used in (Zhang et al. 2010) takes a few minutes before convergence occurs, so a fourth-order polynomial fitting is used in this work for detrending the 1,000-Hz carrier phase outputs of the software receiver. The detrended outputs from both USRP2 and TRIGR for the L1, L2CM, and L5I on PRN 25 are shown in Fig. 15. The figure shows that USRP2′s carrier phase noise is slightly higher than that of the TRIGR for this satellite on all three bands.

Detrended PRN25 carrier phase measurement comparison between USRP2 and TRIGR front end
Figure 16 shows the carrier phase standard deviations for all GPS satellites in view during the experiments. At L1, the USRP2 and TRIGR carrier phase standard deviations are comparable to within 0.1 degrees. At L2CM, USRP2 carrier phase standard deviation is consistently larger than that of the TRIGR. The difference may exceed 1 degree. At L5, we only have one SV signal which shows that USRP2 underperforms TRIGR by a fraction of a degree.

Detrended carrier phase standard deviation comparison between USRP2 and TRIGR front end for GPS L1, L2CM, and L5I
The more useful signals for ionosphere scintillation studies are the L2CL and L5Q, as they do not have data modulation on them. As a result, a longer coherent integration interval can be applied and a pure PLL based tracking loop can be used to improve the signal tracking threshold. More importantly, strong ionosphere scintillations may be accompanied by sudden 180 degree phase changes that may be difficult to distinguish from data bit transitions (Humphreys et al. 2010a). Our results show that the performance of L2CL and L5Q signals under the benign condition of the test data presented are very similar to L2CM and L5I, respectively. Therefore, in the analysis presented so far, only L2CM and L5I signals are presented.
Figure 17 shows the detrended carrier phase standard deviations for GLONASS L1 and L2 satellites signals captured during the experiment using the USRP2 and the Septentrio receiver. While the USRP2 carrier standard deviation appears to be slightly lower than that of the Septentrio for GLONASS L1, the opposite is true for GLONASS L2. Overall, the two receivers yield similar performances with the differences being limited to less than a small fraction of a degree. By comparing Figs. 16 and 17, we can see that the GLONASS satellite signals carrier phase measurements are much noisier than those of GPS satellite signals. The relatively large phase fluctuations on both the USRP2 front end and the Septentrio receiver appear to indicate that these fluctuations are intrinsic to the signals themselves. These fluctuations make the GLONASS signals less suitable for ionosphere scintillation studies because it will be difficult to separate true scintillation events from these non-scintillation effects.

Detrended GLONASS L1 and L2 carrier phase standard deviations
Analysis of the front end performances
Possible causes of the C/N 0 difference between the TRIGR front end and the USRP2 board are the receiver front end noise figures, VCO and frequency synthesizer quality, and ADC bit resolutions. The noise figure of the USRP RFX daughter board is estimated using a GPS simulator with known input signal power levels. The noise figure is defined by:
where B = 2 MHz at GPS L1 signal bandwidth, G is the receiver front end gain, T is the effective receiver input temperature 290 K, k is the Boltzmann’s constant, and N 0 is the output noise power. From (11), we obtain the reference noise N oi dependency on the noise figure F:
The reference noise can be computed with known input power S i and estimated output SNR out :
Equation (12) and (13) are used to compute the noise figure F. A GPS simulator is used to generate a −130-dBm input and a −140-dBm input, respectively. Their corresponding output SNRs are estimated to be −10 and −21 dB, respectively. So the noise figure for the RFX board used in the front end is around −10 dB. A combined processing of the complex outputs of USRP2 would provide 3-dB additional SNR improvement over using the real output only as is in the case of the TRIGR front end. The noise figure of the TRIGR front end is around 4 dB (Gunawardena et al. 2008). So we expect the SNR or C/N 0 of the USRP2 is about 3 dB less than that of the TRIGR front end for the same L1 or L2 signal source. It should be noted that the measurement of one individual board may not be a good representation of noise figure of the all RFX series boards. The 1-bit re-quantization of the wideband GPS L5 and GLONASS signal may result in 1–2 dB further signal power loss. A FPGA-based real-time raw RF data collection system is currently under development to increase the bit resolution of the wideband samples for the USRP2. The 5–6-dB C/N 0 difference between the L5I and L2CM tracking results in Fig. 13 is caused by the GPS satellite broadcasting power difference. The L2C is broadcasting at 2-dB power lower than L5I (GPS ICD-705). Another 3-dB loss is expected with L2CM or L2CL tracking loop as the signal is time-multiplexed. So the total C/N 0 output for L2CM is about 5 dB less than for L5. The suboptimal noise performance of the USRP2 can be compensated by better tracking loop design. For example, increasing the coherent integration time from 1 ms to 10 ms will result in a gain of 10 dB in SNR. The vector tracking loop developed for the USRP2 data processing can maintain lock of the GPS signal during canonical fade with signal intensity fading of more than 20 dB.
As shown in Fig. 15, the phase noise of the USRP2 is slightly larger than the TRIGR front end even with a common reference used. There are two major reasons that may cause this difference. The first reason is the lower C/N 0 output of the USRP2 that would cause larger phase noise by Eq. (6). The second cause is the integrated VCO/synthesizer on board the RFX daughter board. A two-stage PLL frequency synthesizer is used to generate the reference carrier to down-convert the RF signal to IF in the TRIGR front end, while a one-stage synthesizer is used in the USRP RFX daughter board. The ADF4360-3 chip is used in the RFX1800 daughter board. These reference synthesizers introduce their own phase noise to the IF samples. The phase noise of the synthesizer or the PLL is measured in terms of single-sideband (SSB) power density relative to the carrier in units of dBc/Hz. Table 2 summarizes the specifications of the synthesizers for the TRIGR and the RFX1800 daughter board. We can see that the synthesizer of the USRP2 board causes slightly larger phase noise than the TRIGR. For the GPS L1 signal with 2-MHz bandwidth, the noise cause by the VCO in the USRP2 board is about −70dBc (–133 + 10 × log10(2 M)), while the TRIGR is about −79dBc (–142 + 10 × log10(2 M)), both are insignificant. The differences in the carrier phase noise performance between the two front ends are also unsubstantial. Even through the phase stability of the USRP2 board is not as good as that of the TRIGR front end, the standard deviation of the USRP2 phase noise is quite adequate for scintillation researches.
Conclusions
We present USRP2 as a flexible GNSS signal RF front end. With appropriate daughter board configurations, the USRP2 front end can capture the entire GNSS family of signals. Our objective is to evaluate the performance of the USRP2 front end as an ionosphere scintillation monitoring device. For this purpose, we established experimental setups that allow simultaneous data collection of the USRP2 front ends, an instrumentation quality custom GPS front end TRIGR, and two high end commercial GNSS receivers from the same antenna and driven by the same local oscillators. GPS L1, L2C, and L5 and GLONASS L1 and L2 raw IF samples were collected using the RF front ends, while the commercial receivers generated processed signal observables. The IF samples collected by the USRP2 front ends and the TRIGR front end were processed using the same software acquisition and tracking algorithms. The results show that USRP2 typically generates GPS C/N 0 at about 1–3 dB below that of the TRIGR and 1–2 dB less than that averaged output of NovAtel receiver. The carrier phase fluctuations generated by the two front ends are comparable, with the exception of one particular GPS L2C signal for which the USRP2 front end appears to have larger phase fluctuations (by no more than 1.5 degrees) compared to TRIGR. We do not have direct GLONASS signal IF processing results comparison between the USRP2 and the TRIGR front end as the latter is a dedicated GPS front end. The USRP2 GLONASS processing results are compared with the outputs generated by the Septentrio PolaRxS receiver, and their performances appear to be comparable. The results show that GLONASS signals have relatively large C/N 0 and carrier phase fluctuation which appear to be unrelated to the signal propagation environment. While the additional GLONASS satellite signals have great added benefits in applications, such as ionosphere tomography studies, these signal fluctuations make them less desirable.
References
Abidi AA (1995) Direct-conversion radio transceivers for digital communications. IEEE J Solid State Circuits 30(12):1399–1410
Akos DM (1997) A software radio approach to global navigation satellite system receiver design. Dissertation, Ohio University
Braschak M, Brown H Jr, Carberry J, Grant T, Hatten G, Patocka R, Watts E (2010) GPS IIF satellite overview. In: Proceedings of ION GNSS, Portland, OR
Cao C, Jing G, Luo M (2008) COMPASS satellite navigation system development. PNT challenges and opportunities symposium, Stanford
Crols J, Steyaert M (1995) A single-chip 900 MHz CMOS receiver front-end with a high performance low-IF topology. IEEE J Solid State Circuits 30(12):1483–1492
Crols J, Steyaert M (1998) Low-IF topologies for high-performance analog front ends of fully integrated receivers. IEEE Trans Circuits Syst II 45(3):269–282
El-Arini MB, Secan J, Klobuchar JA, Doherty PH, Bishop G, Groves K (2009) Ionospheric effects on GPS signals in the Arctic region using early GPS data from Thule, Greenland. Radio Sci 44:S0A05. doi:10.1029/2008RS004031
Fremouw EJ, Leadabrand RL, Livingston RC, Cousins MD, Rino CL, Fair BC, Long RA (1978) Early results from the DNA wideband satellite experiment complex-signal scintillation. Radio Sci 13(1):167–187
Groves K, Basu S, Quinn J, Pedersen T, Falinski K, Brown A, Silva R, Ning P (2000) A comparison of GPS performance in a scintillating environment at Ascension Island. In: Proceedings of ION GPS, Salt Lake City, UT
Gunawardena S, Zhu Z, van Graas F (2008) Triple frequency RF front-end for GNSS instrumentation receiver applications. In: Proceedings of ION GNSS, Savanna, GA
Hein GW, Wallner S (2005) Development and design of Galileo. In: Proceedings of ION GPS, Cambridge, MA
Hogenauer EB (1981) An economical class of digital filters for decimation and interpolation. IEEE Trans. Acous. Speech Signal. In: Proceedings of ASSP-29 2:155–162
Humphreys TE, Psiaki ML, Ledvina BM, Cerruti AP, Kintner PM (2010a) Data-driven testbed for evaluating GPS carrier tracking loops in ionospheric scintillation. IEEE Trans Aerosp Electron Syst 46(4):1609–1623
Humphreys TE, Psiaki M, Ledvina B, Cerruti A, Kintner PM Jr (2010b) Modeling the effects of ionospheric scintillation on GPS carrier phase tracking. IEEE Trans Aerosp Electron Syst 46(4):1624–1637
Kaplan ED, Ward P, Betz J, Hegarty C (2005) Understanding GPS: principles and applications, ch. 5: satellite signal acquisition, tracking and data demodulation, 2nd edn. Artech House Publishers, Norwood, pp 153–240
Misra P, Enge P (2006) Global positioning system: signals, measurements, and performance, 2nd edn. Ganga-Jamuna Press, Lincoln
Morton J (2007) Software receivers will define future development. GPS World, Expert Advice Column
O′Hanlon B, Psiaki M, Powell S, Bhatti J, Humphreys TE, Crowley G, Bust G (2011) CASES: a smart, compact GPS software receiver for space weather monitoring. In: Proceedings of ION GNSS, Portland, Oregon
Peng S, Morton Y (2010) A USRP2-Based multi-constellation and multi-frequency GNSS software receiver for ionosphere scintillation studies. In: Proceedings of ION ITM, San Diego, CA
Peng S, Morton Y, Di R (2012) A multiple-frequency GPS software receiver design based on a vector tracking loop. IEEE/ION PLANS 2012, Myrtle Beach
Razavi B (1997) Design considerations for direct-conversion receivers. IEEE Trans Circuits Syst II 44(6):428–435
Razavi A, Begre-Ebgiabher D, Akos D (2008) Carrier loop architectures for tracking weak GPS signals. IEEE Trans Aerosp Electron Syst 44(2):697–710
Revnivykh S (2010) GLONASS status and progress. In: Proceedings of ION GPS, Portland, Oregon
Rudell JC, Ou J, Cho TB, Chien G, Brianti F, Weldon JA, Gray PR (1997) A 1.9-GHz wide-band IF double conversion CMOS receiver for cordless telephone applications. IEEE J Solid State Circuits 32(12):2071–2088
Seo J, Walter T, Chiou T, Enge P (2009) Characteristics of deep GPS signal fading due to ionospheric scintillation for aviation receiver design. Radio Sci 44:RS0A16. doi:10.1029/2008RS004077
Seo J, Walter T, Enge P (2011) Correlation of GPS signal fades due to ionospheric scintillation for aviation applications. Adv Space Res 47:1777–1788
Skone S, Man F, Ghafoori F, Tiwari R (2008) Investigation of scintillation characteristics for high latitude phenomena. In: Proceedings of ION GNSS, Savana, GA
Tsui JBY (2004) Fundamentals of global positioning system receivers, a software approach, 2nd edn. Wiley, New York
van Dierendonck AJ (1996), GPS receivers. In: Parkinson BW, Spilker JJ Jr (eds) Global positioning system: theory and applications, Vol I. AIAA, pp 329–407
van Dierendonck AJ (2005) How GPS receivers measure (or should measure) ionospheric scintillation and TEC and how GPS receivers are affected by the ionosphere? In: Proceedings of Ionosphere Effects Symposium, Alexandria, VA
van Dierendonck AJ, Kloburchar J, Hua Q (1993) Ionospheric scintillation monitoring using commercial single frequency C/A code receivers. In: Proceedings of ION GPS, Portland, OR
van Dierendonck AJ, Hua Q, Fenton P, Klobuchar J (1996) Commercial ionospheric scintillation monitoring receiver development and test results. In: Proceedings of ION GPS, Cambridge, MA
van Direndonck AJ, Arbesser-Rastburg B (2004) Measuring ionospheric scintillation in the equatorial region over Africa, including measurements from SBAS geostationary satellite signals. In: Proceedings of Ionosphere Effect Symposium, Trieste, Italy
Vikram P (2011) Event driven GPS data collection system for studying ionospheric scintillation. MS thesis, Miami University
Wang J, Morel J, Morton Y (2011) Predicting GLONASS satellite orbit based on an almanac conversion algorithm for controlled ionosphere scintillation experiment planning. In: Proceedings of ION GNSS, Portland, OR
Wang J, Morton Y, Zhou Q, van Graas F, Pelgrum W (2012), Time-frequency analysis of ionosphere scintillations observed by a GNSS receiver array. In: Proceedings of IEEE PLANS, Myrtle Beach, SC
Zhang L, Morton Y, Zhou Q, van Graas F, Beach T (2010) Characterization of GNSS signal parameters under ionosphere scintillation conditions using sequential and batch-based tracking algorithms. In: Proceedings of IEEE PLANS, Palm Springs, CA
Acknowledgments
This project is supported by AFOSR grant #FA9550-07-1-0354.
Open Access
This article is distributed under the terms of the Creative Commons Attribution License which permits any use, distribution, and reproduction in any medium, provided the original author(s) and the source are credited.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 2.0 International License (https://creativecommons.org/licenses/by/2.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
About this article
Cite this article
Peng, S., Morton, Y. A USRP2-based reconfigurable multi-constellation multi-frequency GNSS software receiver front end. GPS Solut 17, 89–102 (2013). https://doi.org/10.1007/s10291-012-0263-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10291-012-0263-y