
Abstract
The goal of this article is to propose a cross-perspective around Collaborative Robotics—seen as a remarkable example of technologies 4.0 in an industrial context—by calling on sociology, activity-centred ergonomics, engineering, and robotics expertises. The development of this cross-perspective is thought to be a key issue to improve the design of work organisation for the Industry 4.0. After a socio-historical review of promises of Collaborative Robotics, the interdisciplinary approach developed and applied in a French Small & Medium Enterprise (SME) is presented. In this case study, two work situations are focused on in an interdisciplinary perspective: on the one hand, the one of operators whose professional gestures are intended to be supported by collaborative robots, and on the other the one of managers and executives as responsible for socio-technical changes. Our results reveal the technical and socio-organisational challenges faced by SMEs beyond the introduction of given technologies: analysing the relevance and feasibility of cobotisation projects with regard to the complexity of professional gestures and preserving the quality of work and performance under a continuous pressure to change (organisations, technologies). These findings support discussions of promises of collaborative robotics, and more generally Industry 4.0, regarding effective worker/technology collaboration and the possibility of “healthy” and performant work; they reiterate requirements for work-centred and participatory design, for reconnection in a sensory experience in a more and more digitalized work and open ways for more interdisciplinary approaches.
Similar content being viewed by others


1 Introduction
For several years now, the development of technologies coupled with significant political determination to upgrade industrial production tools all around the worldFootnote 1 (e.g. Bidet-Mayer 2016) have led to injunctions made to companies to “upgrade” their industrial tools, i.e. to significantly augment such industrial tools through a range of technologies (collaborative robots, Artificial Intelligence, IOT, big data, Virtual and Augmented Reality, etc.). In some policies, such as in France, it is claimed that these transformations must also imply a profound transformation in work organisations and design approaches in making “The human central” to these transformations, in particular in Small and Medium Enterprises (SMEs). And, it could be argued that COVID-19 and ecological crisis may reinforce this policy determination in relation to the significant industrial resettlement needs revealed by these crisis.
In this context, our conviction—and research action experience—is that the Industry 4.0, and promises around technologies and large-scale industrial resettlement must imply: (1) “departitioning” of disciplines and perspectives—technical vs. humanities—involved in the design of work situations and (2) construction of interdisciplinary approaches to understand and transform work in relation to technology.
This article sets out to describe such an interdisciplinary approach (combining activity-centred ergonomics, socio-history, sociology and socio-anthropology, robotics and process engineering)Footnote 2 based on the introduction of Collaborative Robotics technology (see below) in work situations. Here, collaborative robotics is seen as a remarkable example in the Industry 4.0 issues regarding work and technologies design processes (e.g. Cheon et al. 2022; Pacaux-Lemoine et al. 2021; Kadir and Broberg 2021) embedding several promises and “frontiers issues” (e.g. Knudsen and Kaivo-Oja 2020; Saraceno 2020; Liu et al. 2022). Indeed, collaborative robotics proposes both to produce technologies and to imagine and make effective a particular relationship between robots, humans, work environment and work, as well as between humans. Questions then arise at the interface between cognitics and human factor (behaviour, decision, robustness and error control), biomechanics (modelling of motion behaviour and dynamics) and robotics (production of reliable, precise and/or repetitive mechanical behaviours for industrial, health or usability purposes). This motivates the development of interdisciplinary approaches. Moreover, at the beginning of the project in 2017, collaborative robotics was of particular interest for us, as it embeds promises—supported by public authorities, scientists and cobot integrators—of a relationship between technologies and work: low-cost and easy to implement and maintain technology; virtuous technology helping prevention of Muskulo-Squelettal disorders by relieving workers of physically hard and painful tasks; non-substitutive technologies; a means to relocalise industrial jobs in Europe (called in France “robocalisation”).
However, these promises also echo the criticisms made in relation: (1) to fully "autonomous" and "expert" technology considered up to the 1990s by the coupling between robotics and artificial intelligence and which aimed to replace humans (Du Tertre and Santilli 1992) or already assist them (Rabardel 1995), or (2) to a former well-known thesis in sociology—that of Simondon (1958) (see below). It should also be remembered that the introduction of new technology always represents a significant change in the organisation and activity of workers, as was well described in particular by the socio-technical approach (e.g. Cherns 1976). The introduction of new technology can thus have consequences both: (1) on industrial performance—it can make it more difficult to achieve objectives in terms of deadlines, productivity and quality (e.g. Schoose et al. 2022; Schoose 2022); the degradation or stagnation of production after the implementation of collaborative robots have moreover been referred to in several reports and case studies (Cherubini et al. 2016; Jocelyn et al. 2017; Quenehen et al. 2019), and (2) on the degradation of workers’ health (this will be referred to again, 1–4).Thus, these limits invite us to discuss these promises in relation to introduction of collaborative robotics with regards to technical, safety, socio-organisational and health aspects related to work transformation situations and the sensory, cognitive and social experience of workers.
In the following, promises of Collaborative Robotics with regards to models and knowledge of our disciplines are first discussed, in order to define the research strategy developed in a research field – a typical SME in France. Promises of collaborative robotics are then discussed with regard to the feasibility and relevance of cobotisation projects in relation to two work situations: the one of workers whose professional gestures are intended to be supported by collaborative robots, and the one of managers and executives as responsible for a variety of socio-technical changes, including collaborative robots attempts of introduction.
2 Interdisciplinary exploration of promises of collaborative robotics
2.1 Cobot or collaborative robots as concepts under construction
Since 1980–1990, the robotics field has been at a significant epistemological and technological turning point, in particular through the development of teleoperation techniques and the interaction of robots with their physical environments, in connection with the improvement of proprioceptive (e.g. position, force) and exteroceptive (e.g. vision) sensors. These transformations led in particular to work on "robotic handling" from which emerged new robotic applications in the industrial context (Moulieres-Seban 2017) and in the mid-1990s the concept of "cobotics".
However, while the industrial robot is well defined in the robotics community as a “manipulator, multi-application, reprogrammable, automatically controlled, programmable on three or more axes, which can be fixed on site or mobile, for use in industrial automation applications” (ISO 2012; 2016), the cobotFootnote 3 and collaborative robot concepts are much less so. "Conventional" industrial robots are by design powerful—and therefore raise safety issues—and have repeatabilityFootnote 4The meaning and projected uses of the cobot have gradually emerged in the gap of what is expected of a "conventional" robot: the cobot shares a physical environment with workers and is not separated from them by safety barriers (cages), a cobot is precise and skilful, a cobot does not replace the worker but allows co-handling between workers and cobots. Thus, a cobot would now provide assistance in “controlling” the gesture rather than additional strength or precision: "Cobots hold great promise for human/computer physical interaction. The philosophy behind cobots is that shared control of motion, rather than amplification of human power, is the appropriate metaphor for collaboration” (Peshkin and Colgate 1999). “The cobot approach is based on the recognition that in the industrial environment, intelligent tools are needed more to supply guidance than to supply power. It's the power aspect that is potentially dangerous” (Akella et al. 1999). These "new" robots would thus make it possible to propose technical solutions for industrial applications, non-repetitive applications or applications requiring a precision greater than a tenth of a millimetre and an agility close to human dexterity, which were previously excluded from industrial robotics. We will see later on the importance for a company of the promise of possible preservation of this know-how in connection with the cobotisation of a workstation .
The announced promise of an ability to "work together", without danger, has thus accompanied the idea of co-handling, which refers to a specific area within the robotics field and has been making significant progress since the 2000s. For example, Morel (2015) reported "that efforts are currently being made to develop a new type of machine (…) technically derived from robotics, but more akin to tools than to machines. (…) We can venture to define a comanipulator in the following way: any active system performing a task, usually in contact with the environment, and which can be controlled by direct contact by an operator. Its purpose is to increase the operator's handling performance". (Morel 2015).
To explicitly illustrate the various types of these industrial robotics technologies, we have already proposed to classify them according to the degree of interaction with humans by distinguishing two types of solutions (Fig. 1, Bounouar et al. 2019):
-
Robotics solutions that incorporate the conventional elements of industrial robotics. In this context, the robot carries out the tasks independently, without any human intervention. The main development concerns the possibility of removing safety elements such as barriers or grids, in favour of immaterial devices such as light barriers or laser scanners. Collaborative manipulator robots can naturally fall into this category.
-
Cobotic solutions that require human presence to perform tasks. In this context, cobots, exoskeletons or remotely controlled manipulators are guided by users. These cobotic solutions are used to help the operator accomplish his task by guiding his movements, increasing the force exerted or compensating the weight of an object or a tool. Depending on the operating scenario, manipulators and mobile robots can be considered as cobots if their operation involves the presence of users. In these cases, human presence is not considered exclusively as a degraded mode of operation.

Classification of industrial robotics (Bounouar et al. 2019)
Finally, cobotics can thus be thought of as the convergence of a series of promises of "collaboration" through which we seek to rid robotic devices of the imagination of an automatic machine replacing or subordinating the operator. Cobotics thus offers to: preserve the health of workers by relieving humans of painful or repetitive tasks; improve performance by combining human and robotic "skills"; contribute to a better organisation of human activity in the connection with technologies at a low human and financial cost, both for the inclusion and the maintenance of these technologies. The "co" in cobot expresses the promise of a collaboration conceived as true a joint action on a "material" (e.g. a mechanical part) and the environment, in assisting humans. Cobotics promises a vision of humans—and their bodies—being kept not just "in the loop" (cognitive), but in direct action: the cobot would be non-autonomous in the sense that its existence would depend entirely on the gesture of operators. However, these promises are not self-evident, in that they give rise to debates and reinvigorate old theories, such as that of Simondon (1958) who took the view opposite to the commonly accepted idea according to which the level of perfection of a machine would be proportional to the level of automatism it contains. We thus propose to discuss these promises of collaboration between humans and technology in terms of occupational health and safety in the remainder of this article.
2.2 From anthropomorphism and replacement to the necessary human/environment connection
The promise of co-handling emerges in general considerations on the relationship between the "human hand" and the "robotic arm". On the one hand, industrial robotics, up to that point confined to repetitive and highly stabilised tasks with little contact with the material (e.g. welding or painting), had sought to develop devices that could replace operators in assembly tasks in a context of production "flexibilisation". On the other, the remote handling deployed in "flow" industries (nuclear, petrochemical) operating on the basis of a "master/slave" modelFootnote 5 had sought to develop faster remote handling arm control systems. Handling robotics then promised flexible, controllable mechanical "anthropomorphic" arms "like" human arms (Minsky 1980).
However, this raised important safety issues related to potential human/robot contact.Footnote 6 These limitations were related to the impossibility for a handling robot to control force and displacement simultaneously, which implied that handling robots had to operate in an environment that was properly "structured" in space and time—e.g., each part or element of the workspace is expected and referenced. The greatest efforts regarding handling robotics will therefore focus on the development of control systems that allow the robot to operate in an unstable environment, in order to approximate human capabilities of adapting to open or unpredictable environments.
This orientation, which advocated the "reproduction" of the human arm, was to be opposed by a new conception of handling which would have inspired cobotics and which coupled the promise of flexibility with that of collaboration. According to Daniel E. Whitney (1977; 1986; 1987) who had largely contributed to the previous research, even if we could design these "real robots" reproducing the human grip, it would be useless in a factory. Indeed, according to his conception, it serves no purpose, in industrial robotics, to imitate the human sensory-motor system given that it is adapted to very unstable environments, but rather the industrial environment should be made more stable, thereby contributing to control the relationship between the parts (the material), the operators and the machines.Footnote 7
In connection with technological developments, a challenge in the development of robotics is thus to abandon the focus on the robot and its control system as such, and reconsider the relationship between the machine, the human and the environment, undoubtedly under the growing influence of cybernetics (Wiener 1954). It is no longer a question of considering an individual interaction between a technology and a human, but rather of rethinking work in terms of the workers' immersion in an environment they were a part of. In a semi-open system, emphasising the relationship between the machine and the environment, the human would have a central role again, that of determining the "condition for the essential opening of the mechanism" (Triclot 2008, p.397). This is the whole challenge behind a robot's anthropomorphic design: machines would no longer replace workers. This is how the cobotic promise of collaboration has emerged, through the necessary coupling between humans, machines and the work environment. However, what kind of collaboration would there then between workers and cobots?
2.3 Increasing collaboration and autonomy of the worker/cobot pair?
The concepts of human/robot cooperation and collaboration are difficult to define given the fact that there is little consensus regarding the definition of the same concepts applied to human-to-human situations in learning or work environments (Dillenbourg et al. 1995; Benchekroun and Weill-Fassina 2000), to human cooperation mediated by technology as studied by the Computer-Supported Cooperative Work field (Schmidt 1994) or ergonomics and cognition sciences (e.g. Hoc 2001; Dekker and Woods 2002; Bourmaud and Rabardel 2003).
Even if, some typologies of Human–Robot Interaction or Collaboration are proposed (e.g. Prati et al. 2021), they are questionable with regards to human cooperation conceptualisation.
In sociology, for Durkheim, cooperation has the strong meaning of a moral obligation: the "what others expect of me" is what establishes the link between social beings. For Activity-Centred Ergonomics, collaboration is seen as "a collective activity in which operators perform various operations on the same object which are related to each other by a common goal in the short or medium term" (De La Garza and Weill-Fassina 2000). This activity implies working to forge links (Schmidt 1994), in particular through dialogical processes—debates, argumentation (e.g. Baker 2015). Given these conceptualisations, the use of the concepts of collaboration and cooperation between a human and a machine would almost be a misnomer. Indeed, collaboration between humans and robots does not imply a social contract, argumentative processes, negotiation.
The conceptualisation of human/machine cooperation from Human–Computer interactions studies and from cognitive ergonomics is probably more appropriate for considering human–robot cooperation/collaboration (e.g. Hoc 2001). In this conceptualisation, a cooperative work situation for a worker-robot pair would involve the dynamic distribution and management of interdependent tasks, as well as jointly constructed performance of these tasks. This human–robot cooperation in a situation requires a spatio-temporal co-presence of the human and the robot, the sharing of a physical and informational environment, the possibilities to see and hear each other, to make their actions visible and to recognise the intentions of the human and the robot (Heath & Luff 1992; Benchekroun 2000). This is crucial to manage task interdependence and work articulation between workers and robot. In Human cooperation situation, these articulations may depend on construction of situation awareness, i.e. a representation of situation current state (e.g. knowledge about real-time contribution of each cooperative partners) (Schmidt 2002). Situation awareness construction process is supported by the fact that cooperative partners may: (1) capture actions of others and adjust their own activities and (2) make visible elements of one own actions that are relevant for others (Salembier and Zouinar 2004; Schmidt 2002). Construction of situation awareness is thus the result of an active intention, of « intelligence» of humans: it is grounded in skills and proficiency of cooperative workers to recognize, to understand and make visible their activities in a reciprocal way (Salembier and Zouinar 2004). In the Industry 4.0 context, this awareness construction requirements, in relation of capacity of workers to understand situation, make relevant decision, may be reinforced as complexity and “unexplainabilty” of “intelligent” systems (Gamkrelidze 2022; Pacaux-Lemoine et al. 2022).
In the human–machine cooperation conceptualisation, the human and robot here seem to form a system. This is an alternative proposal for considering the relationship between humans and machines. This approach, shared by philosophers, sociologists and technology anthropologists, without necessarily using the same concepts (the common terms attachment, complex, system, interweaving, and grip are used), no longer corresponds to a replacement, or even a tooling of humans, but to a coupling (Varela 1989) that is effective with regard to the activity of workers. The effects of coupling, which are related to a cognitive, bodily, sensory, affective and motor experience, do not take place beforehand (Moricot and Rosselin-Bareille 2021), but emerge from the system formed by the human and the robot. However, the promise of collaboration and non-replacement, or the vision of a human–machine system, does not ensure the worker's non-subordination or autonomy with respect to the "new" machine. This promise is already qualified by the technical design and implementation difficulties described at the present time and in the past (Hoc 2001; Kiesler & Hinds 2004; Woods et al. 2009), as well as by the inevitable effects of a coupling between humans and technology which necessarily alters the role of humans, their gestures and their work, and, in so doing, question the assertion according to which opting for the cobot rather than the robot would be to opt for the health of operators over the organisation's productivity. Would not this be a case, from the operator's standpoint, of a simulacrum of autonomy, where the gesture and the freedom of action would in reality depend on criteria and values decided upon from outside the activity itself by the designers of robotic technologies and management? This is, for example, what was described in early work on the introduction of collaborative robots in a production situation where workers paradoxically found themselves serving the machine, in a position to check that it was operating properly or was being supplied with raw materials (e.g. Moulieres-Seban 2017). This was also described in a former cobot demonstrator design project (Barcellini 2020), in which some kind of « awareness skill» of the robot was grounded in information capture and processing: e.g. human position in space, recognition of the position of the workers’ hand (Cherubini et al. 2019) coupled with direct actions of workers pushing intentionally information to robot about their human actions through codified gestures. However, the construction of situation awareness was very limited and mainly pushed by workers—leading to additional workload—and concern more coordination of tasks than actual cooperation in a strong sense.
2.4 Helping, protecting or exposing: the cobot as a resource or a constraint for health care work?
The introduction of collaborative robots thus raises questions as to the promises of healthy work due to paradoxical consequences that have been observed at least since the industrial revolution, with the development of mechanisation and then automation. Technological developments can thus be seen as providing real help for workers, for example, by relieving them of tedious, repetitive tasks. However, they may also result in them being exposed to new situations that are potentially harmful to their health and safety (Kadir and Broberg 2021; Schoose et al. 2022 and Schoose 2022 for cobot).
However, cobots are presented as a relatively easy solution to be incorporated in workstations and used in preventing Musculoskeletal Disorders, in promising to assist workers in certain tasks involving high biomechanical loads. However, biomechanical overstress is only one of the risk factors for the appearance of these health problems and occupational wear and tear. While the reduction of certain biomechanical stresses (e.g. intensity of contraction and joint amplitude) is accompanied by an increase in other biomechanical stresses (gesture frequency, asymmetry, force to be applied), a greater subordination of the worker to the robot's actions and a limitation of its "power to act" (e.g. Rabardel 1995), there is a risk, on the contrary, of creating the conditions for a deterioration in the worker's health (see, for example, Buchmann and Landry 2010; Moulieres-Seban 2017; Schoose et al. 2022 and Schoose 2022). An impoverishment of the part of the work allocated to workers, or a subordination, or even a subjection of their work to that carried out by the cobot, could thus represent more an additional risk factor for their physical and psychological health and not a means of protecting their health.
The idea that the cobot can be implemented easily, or almost "naturally", through a technological feat, overlooks the fact that it is still necessary for robot manufacturers to implement various intrinsic protection measures (built-in safety functions, torque sensors, etc.) and comply with normative safety requirements (ISO 10218–1, 2011). For example, gripping tools (pliers, screwdrivers, etc.), the parts handled, the frequency and the work environment can generate serious risks of collision, jamming, pinching or cutting. Other areas of concern have been highlighted in studies of prevention in collaborative robotics (Haeflinger 2017).
However, this approach is not sufficient: in the context of Industry 4.0, taking seriously into account health and safety issues together with performance of work while redesigning work systems including technologies 4.0 reinforces the need for new model of project management grounded “in new human-centric design and engineering philosophie” (Kardir and Broberg 2021, p.1) or in socio-technical system engineering (e.g. Pacaux-Lemoine et al. 2021), in the line with recent work system design principles presented in a joint publication by International Ergonomics Association and International Labour Association (IEA and ILO 2020).
3 Research objectives and strategy
3.1 Research strategy
The discussion below under the magnifying glass of our interdisciplinary concepts and knowledge (activity-centred ergonomics, socio-anthropology and socio-history, robotics and industrial engineering) nuances the promises associated to collaborative robotics and helps in defining research requirements and research strategy to be explored more finely on a field, as synthetized in \* MERGEFORMAT Fig. 2.

Discussion of promises of cobots and field. Research requirements resulting from our interdisciplinary exploration of promises of collaborative robotics. Concepts and knowledge mobilized are presented using salmon colour behind each discipline
The ambition of our project was to discuss these promises of worker-robot collaboration, autonomy and of preserving a healthy and performant work (top of the figure), with regards to the human/robot/environment considerations and the work system design process set up to implement a new work situation including a cobot (salmon box at the middle of Fig. 2); this objective in the light of an interdisciplinary approach, anchored in a field.
We opted to focus on a Small and Medium Enterprises (SMEs) field as: (1) they are a prime target of the French "Industry of the Future" programme and they represent 99% of business in Europe,Footnote 8(2) they have specific needs regarding to digital transformation (Leso et al. 2023), (3) and their "restricted" size makes them kind of " in vivo laboratories" which seems to us to be favourable to the development of interdisciplinary approaches.
In this field and in relation with the need to analyse human/work/ environment and to set up new project management approaches, we choose to focus not only on fine-grain possible collaborations between workers and robots, but also on the understanding of how socio-technical transformation are managed in SMEs and on the development of a work-centred participatory design approach (Barcellini et al. 2014; Bounouar et al. 2022) to support global change including an intention of implementation of an ad hoc cobotic technology. So, we were not interested in implementation of general solutions as provided by robotics integrators or already existing worker-cobot systems. This objective was crucial in order to capture the social and technical resources that SME have to conserve and/or difficulties that SME have to cope with, and to conduct a research-intervention that explore in-depth relevance and feasibility of cobots implementation scenarios on a broader context of socio-technical changes in a given SME. We assume that this understanding in SME context—which have less means than large companies—is more powerful to reveal pitfalls and to challenge of cobots design processes.
Finally, in this SME field, we chose to focus on singular work situations (two salmon boxes down Fig. 2): the one of crafting operators whose workstation might be equipped with cobots and the one of SME managers involved in their company transformation including potential cobotisation. This allow us to understand how the issues of human/robot/environment coupling, the possibilities of collaboration, autonomy and healthy work referred to in the previous section are played out in a given organisational and social context.
In the rest of this section, we present the SME company we work with—Ceram company—more specifically before describing our research strategy and questions and the methodological and theoretical framework we use.
3.2 Case study: "craftsmen potters working in the international sphere"
CeramFootnote 9 is an SME located in the centre of France, the main industrial business of which in 2019 is the subcontracting of the production of ceramic parts for foundries in the civil aviation industry.Footnote 10 Ceram is part of the supply chain of two aircraft engine manufacturers. This 150-year-old company has undergone several industrial revolutions: from a porcelain manufacturing company in the nineteenth century, it became a subcontractor for the aviation industry in the early 1990s. In 2019, this company employed about 100 people, divided as follows: two thirds in the production workshops (mixing of ceramic compounds, firing, finishing)—very experienced operators for the most part with little turnover—and one third comprising administrative and management staff (R&D, HR, etc.)—seniority of 2 to 3 years with more turnover. In terms of transformation projects (premises, production tools, etc.), developments and investments are made over time according to market opportunities and opportunities for purchasing equipment. The Industry of the Future programme in France is potentially seen as one of its opportunities; this SME is aware of the Industry of the Future's issues (training of managers in particular, carrying out of Industry of the Future diagnosis) at the time of this research work.Footnote 11 Note that the technologies of ceramic objects have changed moulded material work to become ceramic by firing, which remains unchanging over time. We will see that this point will prove essential subsequently as much for the work of the ceramic part finishing operators as for their supervisors.
3.3 Research objectives emerging from the field
Within this company and in a constructive research-intervention perspective, we work to anchor our research is a given demand; i.e. our research is grounded in and shaped by actual problems that a given field as to cope with. In this approach, research has not to be tackled on a field and it implies a social construction within this field. So, we were tributary of field demand and the one we based our research on was the one who emerges from the company. In this sense, we were asked to investigate the possibilities of cobotisation of a workstation – i.e. a project of cobotisation—for the manual finishing of ceramic cores whose role is central in identifying and dealing with imperfections accumulated throughout the manufacturing process, but which is also considered as an arduous workstation implied in potential musculo-skeletal disorders (MSDs). This request was very relevant for our project as it is in line with the initial intention of cobot in reference Peshkin and Colgate definition so that “the cobot would be non-autonomous in the sense that its existence would depend entirely on the gesture of operators”. At this stake, the replacement and total redefining of the task was not an issue for the company. Thus, it was important to enrich a potential cobot design process with requirements related to work situations in order to ensure productivity, quality, health and safety of work. The request was analysed and discussed with the company and we proposed to extend it to the work of the executives and managers involved in the more global management of the company's transformations. Indeed, the change management associated with the introduction of new technology raises questions as to the social and organisational dimensions of work which go beyond the issues of human–robot collaboration and therefore those of this singular cobotisation project (see above).
Focusing on these two work situations thus provided us with insight into the promises of cobotics in two directions.
First, the work situation of finishing operators, whose workstation is intended to be cobotised, raises questions as to the promises of healthy work and effective collaboration between humans and robots by changing the operators' sensory experience and relationship with ceramic materials and their professional gestures (see below). It then involves questioning the relevance and feasibility of the cobotisation of this workstation, to answer the following questions: is cobotisation realistic and feasible? Is the professional gesture in question cobotisable in its entirety (see below)? What allocation of functions (scenarios of technical assistance) between operators and cobots would really prevent MSDs, and preserve the know-how of operators, and even the development of new know-how?
Second, we focus on the work situation of executives as managers of company transformation projects—including cobotisation—and as overseers of the company's performance, balance and healthy working conditions. This raises questions as to the place of cobotisation projects in the company's history and culture with regards in particular to (1) collective construction and preservation of know-hows and the on-going injunction to changes in companies leading to multiple concomitant projects, to (2) the relevance of digital transformation projects with regard to the promises of healthy and safe working conditions and for the profitability of their production. Then, how do managers arbitrate between the need to preserve know-how within the company and theirs values for the company, which is a guarantee of performance and production quality, and the injunction for change (technological or organisational)? To illustrate the link between the finishing work situation and the executive managers work situations, we focus on managers activities in relation to finishers’ management and digital/technical projects impacting finishing workstation.
3.4 Theoretical and methodological framework mobilized to explore field research questions
These two situations were considered through a hybrid approach using our disciplinary concepts and knowledge. These work situations have been explored in two interdisciplinary PhDs. Bounouar's (2021) PhD, which combines industrial engineering, robotics and Activity-Centred ergonomics, focused on the finishing operators' work; Anne-Cecile Lafeuillade’s (2021) study, based on the Activity-Centred ergonomics and socio-anthropology frameworks, focused on the managers. Once again, it is important to note that the approach developed is a constructivist one, in that it is not normative or evaluative but based on in-situ analysis and open to findings that will emerge from the fields.
Figure 3 synthetizes the research approach and strategy implemented into the SME fields.

Research questions related to crafting operators and executives work situations (salmon boxes down the figure)
The analysis of the work situation of finishing operators informs the relevance and feasibility of the cobotics project to inform the cobotisation project of the company and extend to way the Small and Medium Enterprise (SME) conceptualised it. It is based on the characterisation of finishing operators' work and on the implementation of a participatory design approach. These analyses focused in particular on the finishing professional gestures at stake aim to (1) be able to understand and model them; (2) identify the dynamics of the gesture and the operations with the most impact to prevent MSDs, (3) inform the co-construction of technical assistance scenarios and (4) explore on the choice of possible current cobotics solutions. To do so, the work of finishing operators and the project involving the cobotisation of their workstation was considered through an approach combining: an ergonomics analysis of work, based on Activity-Centred Ergonomics proposals (Daniellou 2005), which allows us to consider professional gestures in all their dimensions (Lémonie and Chassaing 2014), and an approach to the cobotisation project management that hybridises the proposals of Activity-Centred Ergonomics regarding industrial project management (e.g. Daniellou and Garrigou 1992; Garrigou et al. 1995) and those of industrial engineering (see Bounouar et al. 2022 for more details). More specifically on the characterisation of professional gesture, which conceptualisation goes beyond the simple biomechanical and physical dimension of movement and incorporates the mobilisation of: cognitive – i.e. goal pursued by workers –; collective, professional gestures may be diverse and be collectively discussed and elaborated-; and psychic dimensions, possibilities given by the work environment to perform a task in accordance with workers quality of work criteria may have an impact in health (psychic and physical) (Lémonie and Chassaing 2014; Benchekroun et al. 2013). To characterise these gestures, finishing activities were observed and explanatory interviews were carried out with various finishing operators and their managers. The results of the analyses carried out were then confirmed by the finishing operators and their supervisors. On this basis, cobotisation scenarios were established and assessed collectively (operators, supervisors, etc.).
The work situation of executives as managers in connection with the conduct of business transformation projects was considered through an approach including Activity-Centred Ergonomics proposals (Daniellou 2005; Daniellou and Rabardel 2005) and a socio-anthropology approach (e.g. Bouvier 1989; Dubey 2013; Gilbert and Montjaret 2021). The work of managers is seen here as organisational work aiming to produce and maintain a work organisation (e.g. rules governing the work) in order to preserve not only the performance of their company but also the health of workers, and social interactions (e.g. Piney 2015; Gotteland-Agostini et al. 2015). For this purpose, managers make trade-offs based on the meaning they give to events. Faced with the constraints of industrial work (e.g., a form of injunction to permanent change, including technological changes), managers seek to build new benchmarks that ensure the quality of work well done (Lafeuillade 2021).
4 The promises of cobotics “put to the test” by a SME
4.1 Is the professional gesture of ceramic core finishing cobotisable?
4.1.1 A dynamic, coordinated professional gesture involving fine body/material coupling, but a gesture involving strain
In order to explore the relevance and feasibility of the cobotisation of ceramic part operations and to define eventual scenarios of technical assistance to gesture, we have sought to consider the professional gestures of operators in "finishing" a part while complying with respecting the quality requirements. These gestures are thus characterised by (1) gestural knowledge and know-how (photos in Fig. 4); (2) the time organisation of this gesture, the dynamic coordination of the operations using the right hand and the left hand, their variability and their frequency (Fig. 5).

Illustration of the finishing gesture
These gestures are based on the deployment of perceptive-cognitive knowledge and know-how developed from lived experience and finely coupled with the ceramic material worked on. This mobilisation includes tiny articulation of different embodied and cognitive actions and collectively elaborated know-hows:
-
The visual and tactile inspection of the core to be worked on to identify the areas to be treated first, fragile areas of the cores, etc.;
-
The continuous monitoring of core finishing progress after each operation on the various areas of the core;
-
The choice of the right tool depending on the stage and the completion area (sandpaper, files, blower, binoculars);
-
The coordination of operations between the two hands;
-
The knowledge of the quality requirements for each core in order to orient actions;
-
The actions related to the protection of the core against breakage etc.
The deployment of the embodied part of the professional gesture “driven by” the work situation awareness constructed by the worker and know-hows is essential: visual information interpretation regarding the material being worked—based on kwow-hows- leads to rotations of the ceramic part implying fine coordination of the two hands (e.g. offering up the product with the left hand while blowing and releasing the material with the right hand). The actions of the two hands are in turn grounded in fine professional gestures in all their dimensions. The actions of the right hand carrying out the deburring operations during the finishing process deal with: scraping and polishing the worked surface by knowing when and where to stop; replacement of the worked surfaces if needed (based on collectively elaborated know-how); apportioning of the forces applied to avoid breaking or damaging the part worked on, etc. At the same time in a fine coordination elaboration, the actions of the left hand lead to holding and appropriate handling of the core; anticipation of the right hand operations by offering up the right surfaces; protecting the core by absorbing the pressures exerted by the right hand; etc.; all actions being based on collectively elaborated know-how and fine cognitive interpretations and decisions and embodied actions.
To go further on the co-construction of a technical assistance scenario in order to prevent MSDs (see Bounouar et al. 2022; Bounouar 2021) and explore its relevance and feasibility, the understanding of dimensions at stake in professional gestures is not sufficient and one need to better understand the dynamics of the gesture and to identify the actions that may have an impacts of MSDs occurrence (see 2.4).
In this sense, Fig. 5 illustrates the dynamics of this coordinated professional gesture for a given finishing operator, its frequency and variability over time, all aspects which a collaborative robot has to be able to adjust. Even if it is focused on gesture of a given operator, it is a good illustration of professional gestures performed by a diversity of operators observed. Moreover and as put it above, even if this figure focuses on hand mobilisation the professional gestures described to involve a more large mobilization of body and mind. The upper sub-chronicle of the figure describes the deployment patterns of the left hand holding the core during a part of the finishing of a part spread over 6 min. The second section describes the operations of the right hand, followed by the tasks carried out in relation to the ceramic part and finally the tools used.
First, it illustrates the preponderance of left hand gripping operations (91.5% of the time analysed) (red line "gripping" in the first sub-chronicle) known to involve a high degree of strain from the biodynamic perspective and as one of the risk factors of MSDs, and more particularly of the carpal tunnel syndrome.Footnote 12 Operators confirm the occurrence of joint pain in the wrist of the left hand holding the core, especially after days spent finishing very small- or very large-sized cores. However, the exploration of a technical assistance to this task might take into account that this left hand has the central role of supporting and anticipating the operations carried out by the right hand, preparing the parts to be worked on and pointing the core towards the light source.
Second, it informs on the dynamics and variability of the actions carried out. For example, during the polishing task (3rd sub-chronicle, line 2 "polish" the surface), the operator started by polishing the parts of the core (between 0 and 3 min), before starting the burr removal phase (continuation of the sequence) that a technical assistance might have to adapt to. These two phases always supported by gripping require several rotations of the core and several changes of tools (files, blower, as illustrated on the 4th sub-chronicle), at a variable frequency.
Finally, the chronicle of operations also highlights a significant interaction of the operator with the workstation tools (last line) that would have to be supported for technical assistance. During the first half of the observed finishing operations (up to about 3 min), the operator is interacting with the light source. During the second part, and to remove burrs, the operator worked using the binoculars (× 6 magnification) to see the burrs and scratches betterFootnote 13 (Fig. 5).

Chronicle of tasks regarding finishing operations (operator A) (hh:mm:ss: sss)
4.1.2 Towards technical assistance scenarios for the professional finishing gesture?
Given this analysis, scenarios of assistance with a first task division between workers and cobots has been discussed between workers and managers (Bounouar 2021). This scenario implies the use of the left hand in gripping that the future assistance system has to ensure to support finishing work. It leads to two types of technical inputs to the project of cobotisation—definition of technical functions and exploration of technical assistance solutions, cobotics or not – and to conclude on relevance and feasibility of the cobotisation project.
The technical functions are composed of ( \* MERGEFORMAT Table 1):
-
Main technical functions of the assistance system, i.e. to hold the ceramic core.
-
Constrained technical functions: e.g. hold a range of cores of various sizes and shapes; handle ceramic cores with flexibility, without eliminating the feedback of forces applied by the right hand; do not damage or break the ceramic core; allow maintenance; comply with safety regulations.
The second input concerns exploration of potential technical assistances of professional gesture with regards to MSD prevention, after this step involving the formalisation of the expected functions of the future system, technological monitoring made it possible to identify and to provide inputs about with three approaches for technological assistance which extend the initial intention of introducing a collaborative robot (Fig. 6).

Exploration of solutions of assistance – technological scenarios
This involves:
-
Assistance solutions based on mechatronic systems which would require a custom design;
-
Solutions based on cobotic systems, which would require insight on: (1) the choice and design of specific end effectors (forceps, suction, adhesion, etc.), and (2) the choice of the robotic arm (size, force feedback, reach, costs);
-
Solutions based on exoskeletons (hand glove; exoskeletons) which would nevertheless raise questions about the appreciation of forces and would risk changing the relationship with the material.
This technical exploration, as well as their potential for actual cooperation helps in informing the project of cobotisation of the company. Indeed, this was at the time of the project neither relevant or feasible at it would require further technological developments, given the current technological limitations (cobot speed, adaptability, intention recognition, construction of workers-robots awareness, etc.), with no assurance that such developments would not make work more inflexible by depriving operators of the possibility of their dynamic, variable professional gesture, two essential aspects for both high quality and healthy work (e.g. Chassaing and Lémonie 2014) and so deteriorate more than preventing MSDs.
4.2 Cobotics in the light of the work of managers, between preserving know-how and injunctions for change?
Despite the technical inputs related to relevance and feasibility of the cobotisation project, the analysis of the professional gestures presented below illustrates the subtlety and the value of the knowledge and know-how used by the workers of this company to ensure the quality of ceramic cores and thus the company's economic performance. One may assume that this value has to be conserved and supported in the case of technical transformation that always implies social and organisational transformation and that are often concomitant with other projects (technical or organisational). This calls for a better understanding of the work of the managers in this company given their central role in preserving these possibilities of high-quality work in a context of injunctions for continuous change (Lafeuillade 2021), this understanding helping in defining socio-organisational inputs to address while managing technical changes.
4.2.1 Managers seeking to maintain the balance between the socio-technical system and production quality by preserving production knowledge and know-how
Our analysis reveals that managers are subject to injunctions to transform the company coming from both their engine manufacturers as ordering customers (e.g. injunction to implement specific work organisations inspired by Lean Management, aeronautical certification) and public authorities ("Industry of the Future" programme) while taking account of constraints related to their area (e.g. structure of the employment area) and the company's global strategy. These injunctions give rise to various transformation projects—including cobotisation projects—which coexist within the company and which managers have to include while managing problems related to ongoing production. In this context of potential "imbalance" of the socio-technical system and thus of production quality, managers seek to preserve the manufacturing knowledge and know-how of the experienced employees in the workshops through the use of aspects which they share with productions actors, and which includes a common connotation of high-quality work: quality signifiers (Lafeuillade 2021). At Ceram, these quality signifiersFootnote 14 emanate from the manufacturing know-how related to the variability of the ceramic compound. They are based on the dynamics that workers maintain with the ceramic material, the machines and tools, by touch, sight and hearing regarding an unstable, variable material and machines having their own operating specificities. Managers carry out their supervisory activity taking into account quality signifiers, which help protect the way in which workers control ceramic compound variability and machine operation, and therefore production quality. Specifically, managers protect this know-how by:
-
A tolerance for deviation from the formal instructions governing the work. For example, in a ceramic compound mixing room, managers are aware that mixers know how to adjust the formal recipe in terms of quantity of raw materials based on the compound's texture during mixing and know the mixers and their operation which will affect the way the mixing takes place.
-
A conception of work instructions that is not too restrictive on the ways of doing things. For example, during the firing phase, the core quality depends on the core being placed in a firing tray, in the position indicated in the instruction sheet and without deforming it. The success of this operation depends on the know-how of the injectors who adjust their gestures: know how to proceed quickly or, on the contrary, know how to take their time depending on the texture of the core when it penetrates the sand. Managers preserve production quality by designing fairly loose instructions for setting up the core for firing, which avoids potential contradictions between their manufacturing know-how and the work instruction sheets.
This work in protecting workers' know-how aiming to maintain the balance in the socio-technical system allows workers in workshops to carry out high-quality work while preserving their health. However, organisational or technical transformations may destabilise this knowledge and know-how and thus compromise production quality.
More generally, this results illustrates that change projects, technical, social and organisational, may take into account the importance of this possibility of flexibility in formal rules, as a socio-organisational inputs in project, and that new work organisation with technological assistance have to support (e.g. a technical assistance may be able to support workers in various formal situations; technical assistance may support the maintaining and/or evolutions of given quality signifiers). This would have to be taken into account and discussed as strong requirements in the course of the cobotisation participatory design project with more fine-grain socio-organisational requirements, in the case it would have been relevant and feasible.Footnote 15
4.2.2 The work of managers: seeking a new balance in the context of organisational or technical transformation projects?
To illustrate this point, let's take the example of a recent change in the SME's aeronautical certification with new traceability requirements which call for other digital technologies than cobot to be provided in production management, but with another impact to the finishing of professional gesture described in Sect. 3. However, these means raise questions as to the relationship between manufacturing processes and the ceramic core quality both in the work of managers and production operators. The proposed example is based on the drawing up of specifications related to the design of moulds intended for engine manufacturers.
Up to now, the design of a robust ceramic core mould incorporated undercuts (or wall flares) in its shape that allowed the ceramic core to be ejected without deforming it, but which then called for the excess material to be deburred manually to shape the core to meet its specifications as described in Sect. 3. The Technical Head explained that with the new traceability requirements for core manufacturing, manual deburring leaves marks on the core surface that become visible with digital tools. However, new quality standards in the aeronautical industry seek to reduce tolerance deviations in the manufacturing processes of aeronautical parts, and the marks left on the surface of the ceramic core are now considered as defects: "with the new systems that are going to be able to check the whole product at once, we're going to see that the product is an eyesore when it is magnified 1000 times. So we had a system that worked (…). So now we're going to see defects, but they've been there for 20 years!". The Technical Head explained that up to now, the quality of a ceramic core was defined by its technical capability, in the steel casting industrial chain, to make the expected recesses in the steel parts and without considering its appearance defects which have no effect on its functionality. With the change in certification defining the quality of parts, digital tools make manufacturing marks left on cores more visible, thereby changing the meaning of what a quality ceramic core is by debating the role of know-how oriented towards the core functionality. To support these transformations, managers must find new ways to manage the variability of the compound in the manufacturing processes. However, managing the compound variability was central to the developing of a number of manufacturing skills and the seeking of collective solutions between operators and managers to achieve high-quality work. As in the case of the introduction of collaborative robots discussed in Sect. 3, this seeking of increased standardisation of production may result in fears of an impoverishment of work and a distancing of production operators from the sensory experience with the material which has up to now been a guarantee of production quality.
With this example, we illustrate that various projects may impact a given workstation, in the case of the finishers the potential cobotisation project and the digitalisation of traceability project. This may unbalance historico-culturally know-hows (e.g. experience-based quality signifiers or embodied and cognitive know-hows described in Sect. 3) constructed collectively in a given company, and/or defeat them. To preserve these valued know-hows or the support their collective evolutions given changes is thus an issue for executive managers to preserve both health and performant work. This is not self-evident and required strong skills in socio-organisational change management process grounded in identification of know-hows and work requirement which is commonly not at stake in project management (e.g. Barcellini et al. 2014; Barcellini 2020).
5 Discussion and perspectives
5.1 Mains contributions
The interdisciplinary approach developed allows us to discuss and nuance the promises of Industry 4.0 in relation to worker-technology cooperation, health and performance/productivity through the lens of collaborative robotics. This way, we examine the relevance and feasibility of turning the promises of collaborative robotics into tangible work experience with this technology. The socio-historical approach to robotics replaces the development of cobotics in a historical context and, in its controversies, it plays down the rhetoric of newness supported by the promoters of these technologies (politicians, manufacturers, etc.). The fine analysis of the complexity of a professional gesture underpins a discussion around potential technological solutions and their limits beyond the initial intention of executive and managers to equip this work station with cobotics technology. These limitations in the use of collaborative robots are also described and confirmed in recent works (Compan et al. 2022; Schoose et al. 2022; Basle et al. 2022). The analysis of the work of managers carried out in parallel, allows us to discuss the role of technological transformation projects in the broader landscape of company transformations, which like many other issues is subjected to injunctions for continuous changes (Lafeuillade 2021). This analysis illustrates the central role of managers in maintaining the company's performance and health at work in seeking a balance between existing knowledge and know-how—an assurance of high quality and healthy work—and their necessary actions in relation to ongoing changes, including but not reduced to Industry 4.0. We see that the technological changes under way are not self-evident as a guarantee of quality and health (e.g. Kadir and Borberg 2021) as they change the sensory experience of work—involving the professional gesture and the relationship with the material being worked on. All this leads to provide illustration of technical and socio-organisational inputs to be taken into account within project through renew way of managing the redesign of work systems (Kardir and Broberg, 2021). Among the various approach calling for more “human-centric approach” (e.g. Kardir and Broberg 2021; Pacaux-Lemoine et al. 2021; Prati et al. 2021) we grounded our work in the Activity-Centred Ergonomics participatory and work-centred approach design management process (e.g. Garrigou et al. 1995; Barcellini et al. 2014).
The various levels of analysis of our interdisciplinary work have made it possible to approach the subject of transformations of work and companies in a better, more refined and more simultaneous way. The establishing of this interdisciplinarity has required a great deal of discussion and debate, and has made it possible to renew the frameworks of disciplinary analysis, for example by enhancing the project management models used in industrial engineering, based on proposals relating to the Activity-Centred Ergonomics (Bounouar, 202; Bounouar et al. 2022), or enhancement through socio-anthropology approaches emphasizing the body's sensory experience and relationship in understanding the work of managers in addition to the modelling of the activity's ergonomics (Lafeuillade 2021).
5.2 Limits and perspectives
Despite these contributions, we aim at discussion four limitations of our work that call for various perspectives.
The first one refers to the fact that the project of cobotisation that was explored in concertation with a SME issue appears to be irrelevant and unfeasible. This was indeed an interesting result illustrating challenges to cobotisation and technological issues, but it makes impossible to explore more deeply: (1) the articulation of technical and socio-organisational requirements into a participative design project and (2) the development of a demonstrator to experiment the feasibility of fine-grain workers-robots collaboration. In this sense a perspective should be to set up semi-experimental laboratory situations (e.g. Compan 2022; Basle 2022) inspired of in-depth work analysis that may support both technical and socio-organisational issues.
Another limit of this work is related to a quite rapid evolution of the context of the research due to technologies evolutions (i.e. reinforcement of emergence of IA during the time of the research) and societal and industrial context (e.g. COVID and environmental crisis, emergence of relocalisation issues and environmental issues). This may imply a shift of interest of both researchers and companies which is not always compatible with research temporality, means allocated to research and a need to maintain of research objectives coherence and commitment to our funder (e.g. ANR). Despite this limit, one can argue that the interdisciplinary approach developed and technical and socio-organisational issues may be as enough generic to be implemented in moving context, considering some adaptations.
Concerning the span of this research (one given case in SME), the cross and in-depth focus on a given case support the development of an interdisciplinary approach and is indeed informative as results can be discussed with regards to other research (see implications section). However, this type of research may be repeated in other SME context, with other technologies and in more large companies. In the context of SMEs, this requires finding SME actually ready to implement digital technologies: which is more complex that it appears (Lafeuillade et al. 2021; Kadir and Broberg 2021). The larger size of the companies may indeed have an impact on the means related to technical design (e.g. more human and financial means, a diversity of technical skills) but also on the complexity of the organization (e.g. more organizational rigidity, less proximity between workers and management and a lack of knowledge about actual works).
Finally, a limit remains to our interdisciplinary approach: the absence of some disciplines to explore financial of management issues but moreover a partial hybridization of model and approaches. The hybridization implies to have and make time for common ground construction and may lead to ‘disagreement’ management in the case of values conflicts for instance. One can argue that performance research of industrial engineering may not be always compatible with the work emancipation vision that is carried on by some approaches of humanities. This implies once again rooms for deep discussions without ignoring that some contradictions may appears. However, this is a limit and a treasure of interdisciplinarity. Our discussions reveal some difficulties in elaboration a share language, some terms referring to various meaning according to discipline and models. This can give the illusion of a “false” or superficial agreement; a well-known problem of interdisciplinary approaches. However, in our case, we want to emphasize elements at discipline boundaries that emerge from the approach developed. The endeavour of holistic understanding of humans at work and his/her relations to environment remains in the line of several theoretical approaches: perceptive ecology (Gibson 1986), situated action (Suchman 1987) distributed cognition (Hutchins 1995) and work situation (Leplat 1997), perception phenomenology (Merleau-Ponty 1945), sensory and gesture anthropology (Jousse 1974; Bourdieu 1994; Howes 2003; Ingold 2011; Colon 2013). All these approaches come together around the idea that work environments are life “milieu” more than just environment. Milieu notion embodying a pairing notion. This may be view as a minim point but we assume that it is the ground of the rethinking of human–machine interaction.
5.3 Theoretical and practical Implications
Finally, we outline here two main implications of our work challenging the Industry 4.0 work system design process.
A first implication is related to the need to renew with holistic model of human activity, embodying sensory, cognitive, social and psychic experiences. Indeed, the promises of collaboration and healthy work with a collaborative robot, which clash on the one hand with the technological capabilities of cobots and on the other with the underlying models of the relationship between humans and machines. Indeed, there is a real risk of making work more inflexible through a kind of standardising of the professional gesture imposed by a cobot and a transformation of the body's sensory experience with the material, as the object worked on by the operator and the cobot. It has been shown that the variability of the gesture over time and depending on the individual—and not its standardisation—as well as the body's sensory experience with the material, ensure quality work and health (e.g. Lemonie and Chassaing, 2014), and thus also industrial performance. The example of the attempt to assist the professional gesture of finishing a ceramic core, and the manufacturing know-how highlighted, shows that cobotising does not only involve replacing discrete, biomechanical operations performed by operators in order to redistribute them or have them performed by a machine. The cobot enters into the intimacy of a human activity and changes the relationship with bodies and the material being worked on. This implicates a theoretical shit in the challenges related to the development of cobotics and updates an already old contention (Straus 1935; Janet 1936; Jousse 1974; Berthoz 1997): "in reality, humans think with their whole body, they think with their hands, their feet and their ears, as well as with their brain (…) a brain separated from the living being is incapable of thinking through an action". (Jousse 1974, 705). This is precisely what is highlighted in this analysis: the analytical and artificial functional division of employees' work—necessary for cobotisation—does not make sense in embodying the professional gesture as the experience is sensory, social and cognitive. The idea of an incompleteness in the machine that would make it dependent on human know-how (Simondon), i.e. a kind of intelligence of the body, remains very important in relation to models which still prevail today in technological innovation, which tend towards more standardisation and a behaviouralist view of an objectifiable gesture. The main implicit challenge of cobotics may be to reopen the question of the plurality of intelligences and their relationship in the co-performance of an activity. Moreover, this questions the futurist discourse around Operator 4.0 (Romero et al. 2020) in the line with other nuanced positions (e.g. Kadir and Broberg 2021; Kaasinen et al. 2020). It may be wondered whether cobots mark a transitional stage, for lack of anything better, or if the "vision" they embody (from the human, social and political perspective) will take precedence over that of robotics which, in many of its applications, always aims to replace or augment the human operator? As such, the current insight into ways of improving and reinforcing human–machine collaboration is more indicative of continuity than change. It is always a matter of "adjusting the world to the technological imperative (…) by making machines desirable" (Fressoz 2012, p.286). But if we really take seriously the possibility of a harmonious relationship between humans and machines, we need to consider human work in all its social, historical, ergonomics, sensory and emotional dimensions. This claims both for: (1) the development of design criteria implications regarding the way of conceptualizing human–machine collaboration with more thickness, in particular with the need to develop Collaborative Enabling Work Situation design criteria as proposed by Compan et al. 2022 and Compan 2022; (2) the exploration of technological locks regarding interaction, in particular recognition of intention and construction of awareness—and fast programming and adaptative algorithm (Cherubini et al. 2019; Barcellini 2020; Knudsen and Kaivo-Oja 2020; Liu et al. 2022).
This brings us to a second main implication that seeks to highlight the importance of driving organisational and technological transformations in a renewed way (e.g. Kadir and Broberg 2021; Pacaux-Lemoine et al. 2021) and beyond the sole case of collaborative robotics and in connection with the large-scale movement associated with other Industry 4.0 technologies such as Artificial Intelligence (e.g. Gamkrelidze et al. 2021; Gamkrelidze 2022). In spite of the limitations highlighted above, our position is not to consider cobotics—or other technologies—as an illusory or unrealistic promise, but to put forward the need to base organisational and technical transformations on models of human activities at work—on their performance and on health—bringing into the picture the experience and work of operators. While it can be argued that the principle of technology seeking to reduce risks to occupational health is a laudable goal, it requires constant, joint rethinking of work organisation and technology design. With this in mind, we showed that the work of managers is to ensure that these transformation projects—seen as essential in the company's development strategy—preserve the balances established in the company between knowledge, know-how, and the possibilities of social interaction to solve problems, in an attempt to preserve industrial performance and healthy work. It can be seen that there is a tension between the promises of healthy, collaborative work and the promise of industrial performance. A theoretical issue would therefore be a question of collectively developing new knowledge and know-how with a cobot that would support the variability of a gesture over time and between individuals, while preserving the meaning of work and industrial performance (e.g. quality of the parts produced and speed of execution, since cobots are currently still slower than human operators), in a coupling between the worker and the machine. To go further into questions of work and health, it is important to point out that workers are not simply passive when faced with harmful exposures to their health. As many studies have shown, they are actors in the construction of their health and safety, (Dubey 2002, 2000; Caroly 2010) if and only if the organisational and social conditions of work allow them to do so and if they can be a stakeholder in decisions about changes and transformations affecting their work (Davezies 1993; Dubey 2000; Clot 2004; Pueyo et al. 2000). In this perspective, cobots, like all technologies, call for their more global design to be considered within social and power relations. In turn, this renew design approach will support of enabling work situation with cobots. Some of these situations have been already described (Eon et al., 2022) but they are not given or techno-determined but remains in the way change are conducted.
These aspects also call for technologically mediated human work to be considered in all its dimensions, whether social, historical, political, organisational, sensory, cognitive and emotional, and for steps to be taken when carrying out design projects and introducing these technologies into work situations. In short, a systemic vision of work including physical, psychological and social dimensions in interrelations (Canguilhem 1978; Davezies 1993) should be considered in the design of work systems including collaborative robots. This is not self-evident and we argue that it requires participatory change management approaches, centred on the work and experience of workers, often not very present in companies, even though such approaches have long been put forward by the socio-technical approach (e.g. Cherns 1976; Akrich et al. 2006); participatory design (e.g. Simonsen and Robertson 2012) or Activity-Centered ergonomics (e.g. Garrigou et al. 1995; Béguin 2003; Barcellini et al. 2014; Folcher 2019; Barcellini 2020) and are now recalled firmly.
6 Conclusion
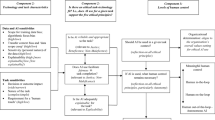
This research has proposed an interdisciplinary analysis of two work situations impacted by Industry 4.0 transformation in a French SME, the one of operators whose professional gestures are intended to be supported by collaborative robots, and the one of managers and executives as responsible for socio-technical changes around Collaborative Robotics. Here collaborative robotics is as a remarkable example of introduction of technologies 4.0 in an industrial context.
As represented in \* MERGEFORMAT Fig. 7, by calling on sociology, activity-centred ergonomics, engineering and robotics expertises, we challenge promises and design process of collaborative robotics. Our results reveal the technical and socio-organisational challenges faced by SMEs beyond the introduction of given technologies: analysing the relevance and feasibility of cobotisation projects with regard to the complexity of professional gestures and preserving the quality of work and performance under a continuous pressure to change (organisations, technologies). These findings support discussions of promises of collaborative robotics, and more generally Industry 4.0, regarding effective worker/technology collaboration and the possibility of “healthy” and performant work; they reiterate requirements for work-centred and participatory design, for reconnection in a sensory experience in a more and more digitalized work and open ways for more interdisciplinary approaches. We assume that reflection about implementation of cobot in professional milieus may reveal a paradigmatical breaking point emerging at low grade. Difficulties in regarding a tangible augmented and harmonious collaboration between workers and machine in Industry 4.0 imposes to adopt a model of human activity at work more holistic in a sensitive ecology perspective (Tassin 2020) revealing that human activity does operate with an active engagement of the whole body (including brain).

Contributions and implications of the research
Data Availability
Data sharing not applicable to this article as no datasets were generated or analysed during the current study.
Notes
Plans such as “Industry 4.0” in Germany, “Industrie du futur” in France, “National Network for Manufacturing Innovation” in USA, “Manufacturing Industry Innovation 3.0 Strategy” in the UK, Made in China 2025, etc.
Project HECTTOR L'Humain Engagé par la Cobotisation dans les Transformations du Travail et des Organisations dans les usines du futur – Humans Involved in Transformation of Work and Organisation through Cobotisation in the Factory of the Future—Projet-ANR-17-CE10-0011.
The term "cobot"—originally used to designate mechanically compliant devices (COmpliantroBOT) for haptic interfaces.
Operation that can be reproduced with a repeatability of a tenth of a millimetre.
The human controls a "master" device that sends the movement to the "slave" arm through a complex control system that makes the movement particularly slow and of low dexterity.
This was the case of the Hardiman robot developed by GE in 1968: an exoskeletal arm based on a master/slave system fitted to the operator's arm.
To illustrate this idea, we can take the idea of the dishwasher, the best dishwashing robot that doesn't have two arms, but rather a basket and a watertight enclosure that is loaded and closed by a human hand.
The company's name, actors and partners were changed. One of the project's initial phases was to involved Small and Medium Enterprises involved in a cobotisation project. Several contacts were made and we were able to meet with 5 companies as potential research sites (Lafeuillade et al. 2020). In the end, only Céram responded to our request.
These cores are used as "moulding" elements for the manufacturing of high-reliability engine parts.
Unlike other SMEs we met.
This sequence was generated using Actogram Kronos™ software.
For example, the ceramic compound texture and temperature as well as the wear of kneading machines in the compound mixing room; the ceramic compound texture and temperature, the characteristics of each hydraulic press, the deformation of the core in the open air and the resistance of the refractory firing sand in the injection workshop; appearance and/or dimensional defects on the fired ceramic core.
References
Akella P, M. Peshkin, E. Colgate, W. Wannasuphoprasit, et. al (1999). Cobots for the Automobile Assembly Line . In Proceedings 1999 IEEE International conference on robotics and automation, 1:728 33. Detroit, MI, USA: IEEE.
Akrich M.Callon, B.Latour (2006), La construction d’un système socio-technique. Esquisse pour une anthropologie des techniques, Paris, Presses des Mines. (The construction of a socio-technical system. Outline for an anthropology of technology)
Baker MJ (2015). Collaboration in collaborative Learning. Special issue of the journal interaction studies: social behaviour and communication in biological and artificial systems on “coordination, collaboration and cooperation: interdisciplinary perspectives”, 451–473.
Barcellini F, Van Belleghem L, Daniellou F (2014) Design projects as opportunities for the development of activities. In: Falzon P (ed) Constructive ergonomics. CRC Press, Taylor and Francis
Barcellini, F. (2020). Quelles conceptions de la coopération humains- robots collaboratifs ? Une expérience de participation au projet de conception d’un démonstrateur de robotique collaborative. Activités, 17(2). (What designs are needed in human/robot cooperation? Experience in participating in a collaborative robotics demonstrator design project)
Basle, D. (2022). Human-Machine Interactions in an augmented cyber-physical environment : towards a heuristic for the design of enabling collaborative environments for the industry of the future. Doctoral dissertation, Université Grenoble Alpes
Basle D, Noël F, Brissaud D, Rocchi V (2022). Improving design of enabling collaborative situation based on augmented reality devices. In product lifecycle management. Green and blue technologies to support smart and sustainable organizations: 18th IFIP WG 5.1 International conference, PLM 2021, Curitiba, Brazil, July 11–14, 2021, Revised selected papers, Part I (pp. 433-446). Cham: Springer International Publishing
Béguin P (2003) Design as a mutual learning process between user and designers. Interact Comput 15(5):709–730
Benchekroun TH (2000). Les espaces de coopérations proxémiques, In : Benchekroun TH, Weill-Fassina A. (Eds), Le travail collectif : perspectives actuelles en ergonomie (pp 35-54). Toulouse, France, Octarès Éditions
Benchekroun TH, Weill-Fassina, A. (2000) Le travail collectif : perspectives actuelles en ergonomie. Toulouse, Octarès Éditions.
Benchekroun TH, Arnoud J, Arama R. (2013). Vitalité des activités et rationalité du Lean: deux études de cas. Perspectives interdisciplinaires sur le travail et la santé, (15-3).
Berthoz A (1997). Le sens du mouvement. Odile Jacob.
Bidet-Mayer T (2016). L’industrie du futur : une compétition mondiale. (Industry of the futur: a global competition). Paris, Presses des Mines.
Boumaud G, Rabardel P (2003) From computer to instrument system: a developmental perspective. Interact Comput 15(5):665–691
Bounouar, M. (2021). Contribution to the consideration of human dimensions in industrial transformation projects - Case of cobotics. doctoral dissertation, Paris HESAM.
Bounouar M, Bearee R, Benchekroun T-H and Siadat A (2019) Etat des lieux de la cobotique industrielle et de la conduite de projet associée. Proceedings of the 16th S-mart colloque, Les Karellis-France.
Bounouar M, Bearee R, Siadat A, Benchekroun TH (2022) On the role of human operators in the design process of cobotic systems. Cogn Technol Work 24:57–73
Bouvier P. (1989). Le travail au quotidien. Une démarche socio-anthropologique. Paris, Presses Universitaires de France, 190 p. (Work on a daily basis. A socio-anthropological approach)
Bourdieu P (1994) Raisons pratiques. Seuil, Paris
Buchmann W, Landry A (2010). Intervenir sur les troubles muscolo-squelettiques. Activités 7(2).
Canguilhem, G. (1978). On the normal and the pathological. Reidell, Dordrech, The Netherlands.
Caroly S (2010) Activité collective et réélaboration des règles : des enjeux pour la santé au travail. Université Victor Segalen - Bordeaux II, Thèse d’Habilitation à Diriger des Recherches. Sciences de l’Homme et Société
Cherns A (1976) The principles of socio-technical design. Hum Relat 29(8):783–792
Cherubini A, Passama R, Crosnier A, Lasnier A, Fraisse P (2016) Collaborative manufacturing with physical human–robot interaction. Robot Comput Integr Manuf 40:1–13
Cheon E, Schneiders E, Diekjobst K, Skov MB. (2022). Robots as a Place for Socializing: Influences of Collaborative Robots on Social Dynamics In- and Outside the Production Cells. Proceedings of the ACM on Human-Computer Interaction, 6(CSCW2), 1-26. [457]. 8https://doi.org/10.1145/355555
Cherubini A, Passama R, Navarro B, Sorour M, Khelloufi A, Mazhar O, Ramdani S (2019) A collaborative robot for the factory of the future: Bazar. Int J Adv Manuf Technol 105:3643–3659
Cheyrouze, M., Barthe, B., & Sartori, J. (2021,). The design of work in atypical schedules: a social innovation approach in hospitals. In: Proceedings of the 21st congress of the international ergonomics association (IEA 2021) Volume IV: Healthcare and healthy work (pp. 259–266). Springer International Publishing, Cham
Clot Y (2004) Action et connaissance en clinique de l’activité. Activités. https://doi.org/10.4000/activites.1145
Colon, P-L (2013) (éd.). Ethnographier les sens, Paris, Petra.
Compan N (2022) Intérêt de la situation de collaboration capacitante pour une approche ergonomique des situations de travail industrielles intégrant des technologies émergentes. Université de Clermon-Auvergne, Thèse de doctorat
Compan N, Coutarel F, Brissaud D, Rix-Lièvre G (2022) Enabling collaborative situations (ECS): interest for the taking into account of the work activity in the design and evaluation of human-technology collaborations in contemporary industry. Le Travail Humain 85:211–240. https://doi.org/10.3917/th.853.0211
Daniellou F (2005) The French-speaking ergonomist’s approach to work activity; crossinfluences of field intervention andconceptual models. Theor Issues Ergon Sci 6(5):409–427
Daniellou F, Garrigou A (1992) Human Factors in Design : Socio-technics or ergonomics ? In: Helander M (ed) Design for manufacturing : a systems approach to concurrent engineering in ergonomics. CRC Press, pp 55–63
Daniellou F, Rabardel P (2005) Activity-oriented approaches to ergonomics: some traditions and communities. Theor Issues Ergon Sci 6(5):353–357
Davezies P (1993) Elements de psycho-dynamiques du travail. Educ Perm 116(3):33–46
Dekker SW, Woods DD (2002) MABA-MABA or abracadabra? Progress on human- automation co-ordination. Cogn Technol Work 4(4):240–244
Dillenbourg P, Baker M, Blaye A, O’Malley C (1995) The evolution of research on collaborative learning. In: Spada E, Reiman P (eds) Learning in humans and machine: towards an interdisciplinary learning science. Elsevier, Oxford, pp 189–211
Du Tertre C, Santilli G (1992). Automatisation et travail, Paris,P.U.F.
Dubey G (2013) Les défis anthropologiques de la robotique personnelle. Annal Des Mines - Réalités Industrielles 2013:96–101. https://doi.org/10.3917/rindu.131.0096(Theanthropologicalchallengesofpersonalrobotics)
Dubey G (2000). Social Factors in air traffic control simulation. European organisation for the safety of air navigation, EEC Report.
Dubey G (2002). Quand les avions entrent dans la salle. La sécurité telle qu’elle se fait. Un comparaison France/Allemagne/Italie . Final Report, Cetcopra université Paris1/ EUROCONTOL. Research funded by EU. (When planes enter the room. Safety as it is implemented. A comparison between France, Germany and Italy)
Folcher V (2019) Innovation at work, lessons learned from a “design for use - design in use” approach: volume vii: ergonomics in design. Des, Act Theor Work Anal Des Affect Des. https://doi.org/10.1007/978-3-319-96071-5_198.Amettreqq
Fressoz, J.B. (2012). L'Apocalypse joyeuse. Une histoire du risque technologique. Le Seuil, Paris, France
Gamkrelidze T, Zouinar M, Barcellini F (2021) The “old” issues of the “new” artificial intelligence systems in professional activities. Digit Transform Challenge Act Work: Understanding Supporting Technol Changes 3:71–86
Gamkrelidze, T. (2022). From the discourses to the realities of the design, deployment and uses of artificial intelligence systems in work situations. Doctoral dissertation, Paris HESAM.
Garrigou A, Daniellou F, Carballeda G, Ruaud S (1995) Activity analysis in participatory design and analysis of participatory design activity. Int J Ind Ergon 15(5):311–327
De la Garza C, Weill-Fassina A. (2000). Régulations horizontales et verticales du risque. In A. Weill-Fassina A, TH Benchekroun, Le travail collectif : perspectives actuelles en ergonomie (pp. 217–234). Toulouse: Octarès Éditions.
Gilbert MP, Monjaret A (2021) Anthropologie du travail. Armand Colin, p 221
Gibson J-J (1986). The ecological approach to visual perception. Hillsdale, NJ: Lawrence
Gotteland-Agostini, C., Pueyo, V., & Béguin, P. (2015). Concevoir des cadres pour faire et faire faire : l’activité d’encadrement dans une entreprise horticole. Activités, 12(12–1) (designing frameworks for doing and getting things done: management activity in a horticultural company)
Haeflinger R. (2017). Prévention dans le domaine de la robotique collaborative synthese de travaux réalisés à l'international. EUROGIP - Paris Réf. Eurogip-129/F novembre 2017. ISBN : 979–10–91290–89–0
Heath C, Luff P (1992) Collaboration and controlcrisis management and multimedia technology in london underground line control rooms. Comput Supported Coop Work 1:69–94. https://doi.org/10.1007/BF00752451
Hoc JM (2001) Towards a cognitive approach to human-machine cooperation in dynamic situations. Int J Hum-Computer Stud 54:509–540. https://doi.org/10.1006/ijhc.2000.0454
Howes D (2003) Sensual relations. Engaging the senses in culture and social theory. University of Michigan Press
Hutchins E (1995) Cognition in the Wild. MIT Press, Cambridge (Mass)
IEA, ILO (2020). Principles and guidelines for human factors/ergonomics (HF/E) design and management of work systems.
Ingold T (2011) The perception of the environment: essays on livelihood, dwelling and skill. Routledge, London
ISO 10218–2. (2011) Robots and robotic devices – safety requirements for industrial robots – part 2: robot systems and integration.
ISO 8373. (2012) Robots and robotic devices – Vocabulary.
ISO/TS 15066. (2016) Robots and robotic devices – collaborative robots.
Janet P (1936) L’intelligence avant le langage. Flammarion, Paris, France
Jocelyn, F., Burlet-Vienney D., Giraud L., Sghaier A. (2017). Robotique collaborative : Évaluation des fonctions de sécurité et retour d’expérience des travailleurs, utilisateurs et intégrateurs au Québec, Rapport scientifique.
Jousse M (1974) Anthropologie du geste. Gallimard, Paris, p 3
Kaasinen E, Schmalfuß F, Özturk C, Aromaa S, Boubekeur M, Heilala J, Walter T (2020) Empowering and engaging industrial workers with operator 4.0 solutions. Comput Ind Eng 139:105678
Kadir BA, Broberg O (2021) Human-centered design of work systems in the transition to industry 4.0. Appl Ergon 92:103334
Kiesler S, Hinds P (2004) Introduction to the special issue on human- robot interaction. Hum-Comput Interact 19(1):1–8
Knudsen M, Kaivo-Oja J (2020) Collaborative robots: frontiers of current literature. J Int Syst: Theor Appl 3(2):13–20
Lafeuillade, A.C. (2021). Transforming the SME at the time of the "Industry of the Future" model, a question of balance in the work of managers. Doctoral dissertation, Paris Hesam
Lafeuillade AC, Barcellini F, Buchmann W, Benchekroun TH (2020). Integrating collaborative robotics in work situations: the intentions of SME managers in the digital transformation of their companies. In M.E Bobillier-Chaumon (Eds) Digital transformations in the challenge of activity and employees : understanding and supporting emerging technological change. ISTE
Lémonie Y, Chaissaing K (2014) From the adaptation of movement to the development of gesture. In: Falzon P (ed) Constructive ergonomics.: A manifesto. CRC Press: Taylor and Francis, pp 50–60
Leplat J (1997) Regards sur l’activité en situation de travail. PUF, Paris
Leso BH, Cortimiglia MN, Ghezzi A (2023) The contribution of organizational culture, structure, and leadership factors in the digital transformation of SMEs: a mixed-methods approach. Cogn Tech Work 25:151–179. https://doi.org/10.1007/s10111-022-00714-2
Liu et al. (2022) Application, Development and Future Opportunities of Collaborative Robots (Cobots) in Manufacturing: A Literature Review, International Journal of Human–Computer Interaction, https://doi.org/10.1080/10447318.2022.2041907
Merleau-Ponty M (1945) Phénoménologie de la perception. Gallimard, Paris
Minsky M. (1980). Telepresence manifesto. Omni magazine, June 1980,44–52
Morel, G. (2017). Robots chirurgiens: la comanipulation, avenir de la chirurgie. Futura Science. https://www.futura-sciences.com/tech/dossiers/robotique-robots-chirurgiens-comanipulation-avenir-chirurgie-1146/page/3/ (11/07/2022).
Moricot C, Rosselin-Bareille C (2021) Quand des hommes respirent sous l’eau et volent dans l’air: Entre cultures matérielles et incapacités naturelles. Tech Cul 75:136–149. https://doi.org/10.4000/tc.15663. (When men breathe underwater and fly in the air: between material cultures and natural disabilities)
Moulieres-Seban T (2017) Conception de systèmes cobotiques industriels : approche cognitique : application à la production pyrotechnique au sein d’ariane group. Université de Bordeaux. https://tel.archives-ouvertes.fr/tel-01697610
Pacaux-Lemoine MP, Berdal Q, Guérin C, Rauffet P, Chauvin C, Trentesaux D (2022) Designing human–system cooperation in industry 4.0 with cognitive work analysis: a first evaluation. Cogn Technol Work 24(1):93–111
Peshkin M, Colgate JE (1999) Cobots. Ind Robot: Int J 26(5):335–341
Piney, C. (2015). Transformation de l'activité d'encadrement de proximité : que fait le pilotage par la performance à la" proximité" des cadres ? Le cas d'une grande administration publique (Doctoral dissertation, Conservatoire national des arts et métiers-CNAM. (Transformation of close supervision activity : what does performance management do to the "proximity" of managers? The case of a large public administration)
Prati E, Peruzzini M, Pellicciari M, Raffaeli R (2021) How to include user experience in the design of human-robot interaction. Robot Comput-Integr Manuf 68:102072
Pueyo V, Gaudart C, Volkoff, S. (2000). Development and maintenance of competences withageing : an ergonomic approach focusing on time management. In proceedings of the ICOH 223.Workshop healthy and productive aging of olders workers , The Hague, 22–24 April, 1999,pp. 109–114
Quenehen A, Pocachard J, Klement N (2019) Process optimisation using collaborative robots - comparative case study. IFAC-PapersOnLine. 52(13):60–65. https://doi.org/10.1016/j.ifacol.2019.11.131
Rabardel, P. (1995). Les hommes et les technologies; une approche cognitive des instruments contemporains. Armand Colin, Paris, France (People and technology ; a cognitive approach to contemporary instruments)
Romero D, Stahre J, Taisch M (2020) The operator 4.0: towards socially sustainable factories of the future. Comput Ind Eng 139:1028
Salembier P, Zouinar M (2004) Intelligibilité mutuelle et contexte partagé inspirations conceptuelles et réduction technologiques (Mutual intelligibility and shared context. Conceptual inspirations and technological reductions). Activités. 1(2):64–85. https://doi.org/10.4000/activites.1243
Saraceno, M. (2020). L’homme au coeur. Du robot au cobot, le mythe du « bon » automate dans la médiatisation de l’industrie du futur » (1978–2018). Communication (the human "in the central role". From robot to cobot, the myth of "proper" automaton in the mediatisation of the "industry of the future")
Schmidt K (1994) Cooperative work and its articulation: requirements for computer support. Le Travail Humain 57(4):345–366
Schmidt K (2002) The problem with ‘awareness’: introductory remarks on ‘awareness in CSCW.’ J Comput Support Cooperative Work 11(3–4):285–298
Schoose C (2022). De l’ébarbage traditionnel à l’usage d’un cobot : analyse du geste professionnel dans un objectif de prévention des troubles musculo-squelettiques. Thèse de doctorat, Université Grenoble Alpes. (From traditional deburring to cobot use : analysis of the professional gesture in order to prevent musculosquelettal disorders)
Schoose C, Cuny-Guerrier A, Caroly S, Claudon L, Wild P, Savescu A. (2022) Evolution of the biomechanical dimension of the professional gestures of grinders when using a collaborative robot. Int J Occup Saf Ergon. 668-675, 29(2): https://doi.org/10.1080/10803548.2022.2065063.
Simondon G. (1958), Du mode d'existence des objets techniques, Paris, Aubier, 1958. (On the mode of existence of technical objects)
Simonsen J, Robertson T (2012) Routledge international handbook of participatory design. Routledge, NY, USA
Straus EW (1935). Du sens des sens : contribution à l'étude des fondements de la psychologie. Editions Jérôme Million, 2000. (The meaning of senses: contribution to the study of the foundations of psychology)
Suchman L (1987) Plans and situated actions: the problem of human machine interaction. Cambridge University Press, Cambridge
Tassin J (2020) Pour une écologie du sensible. Odile Jacob, Paris
Triclot, M. (2008). Le Moment cybernétique. La constitution de la notion d'information. Seyssel, Champ Vallon (Milieux), 2008,
Varela FJ (1989) Autonomie et connaissance. Seuil, Paris
Whitney D (1977) Force feedback control of manipulator fine motions. J Dyn Syst, Meas Control. 99(2):91–97
Whitney D (1986) Real robots don’t need jigs. IEEE Int Conf Robot Autom Proc 3(746):52
Whitney D (1987) Historical perspective and state of the art in robot force control. Int J Robot Res 6(1):3–14
Wiener N (1954) The human use of human beings: cybernetics and society, 2nd edn. Doubleday Anchor
Woods DD, Tittel J, Feil M, Roesler A (2009) Envisioning human- robot coordination in future operations. In SMCC-HR I:2009
Acknowledgements
The research was funded by the French National Agency for Research—Agence Nationale pour la Recherche (ANR) – “To Stimulate Industrial Resurgence” – HECTTOR project (“L'Humain Engagé par la Cobotisation dans les Transformations du Travail et des ORganisations dans les usines du futur” (“Humans Engaged through Cobotisation in Work and Organization Transformation in factories of the Future”) ANR-17-CE10-0011. All the authors warmly thank the Ceram company for its help.
Funding
ANR, Projet-ANR-17-CE10-0011, Projet-ANR-17-CE10-0011, Projet-ANR-17-CE10-0011.
Author information
Authors and Affiliations
Contributions
The article has been written by all the co-authors. It is based on the post-doctoral work of MS and on Ph.D work of A-CL and MB.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare no competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Barcellini, F., Béarée, R., Benchekroun, TH. et al. Promises of industry 4.0 under the magnifying glass of interdisciplinarity: revealing operators and managers work and challenging collaborative robot design. Cogn Tech Work 25, 251–271 (2023). https://doi.org/10.1007/s10111-023-00726-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10111-023-00726-6