
Abstract
The microseism induced by hydraulic fracturing is of great significance to the development of geothermal reservoirs and the site selection of geothermal systems. In this study, taking geothermal field data from Qiabuqia as a geological reference, several models are developed for hydraulic fracturing simulations based on the models included in the commercial FracMan™ software suit. A series of numerical simulations are carried out to explore the effects of different fracture parameters, including the existence of faults, in-situ stress state, fracture occurrence, and fracture distribution near faults, on the induced microseisms. The results show that during hydraulic fracturing, the existence of faults does affect the propagation direction of the newly generated fractures, causing the fractures to extend toward the fault. The faults also increase the magnitude of microseismic events and make the distribution of microseismic events farther. Under three different in-situ stress states, the magnitudes of induced microseisms and the distance between microseismic events and injection wells are different, mainly due to the different forms of energy release. The total energy of induced microseisms under the reverse faulting stress state (RF) is the largest. Under the normal faulting stress state (NF), the number of microseismic events is the least, with only 28, and these microseismic events are concentrated near the well, with the farthest distribution distance of only 150 m. The fracture occurrence has a significant effect on induced microseisms, mainly affecting the number and distribution range of induced microseisms. With the same number of fractures, as the fracture concentration to the fault increases, both the maximum magnitude and the farthest distribution distance of the induced microseisms increase.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Nowadays, hydraulic fracturing technology has been widely used in the development of geothermal energy. It not only improves the permeability of the rock in the reservoir, but also creates complex fracture networks in the reservoir as convective heat transfer channels, thereby increasing the productivity of the Enhanced Geothermal System (EGS) (Kruger 1976; Huenges and Ledru 2011; Zhu et al. 2015). However, many studies have pointed out that a large number of microseismic events occur during hydraulic fracturing (e.g., Warpinski et al. 2004; Vermylen and Zoback 2011; Anikiev et al. 2014). Especially when the fracture network of hydraulic fracturing is connected with the faults, it tends to produce some earthquakes with larger magnitude (Maxwell et al. 2009; Zhang et al. 2020). Therefore, it is necessary to study the effects of different fracture distributions, especially those near faults, on the microseismic induced by hydraulic fracturing, which can effectively avoid larger earthquakes and reduce damage to the environment.
Over the past few years, many studies have been conducted on the factors that influence hydraulic fracturing (e.g., Quosay et al. 2020; Ries et al. 2020; Liu et al. 2021; Qiao et al. 2022; Zheng et al. 2022). Generally, hydraulic fracture propagation proceeds through the following four steps: (1) the formation of new hydrofracture, (2) the reopening of pre-existing tensile fractures, (3) the opening of transverse natural fractures, and (4) the initiation of shear slip on the pre-existing fractures. Lamont and Jessen (1963) first investigated the effects of pre-existing fractures on the propagation of hydraulic fractures under tri-axial stresses in the laboratory, and they demonstrated that the width and orientation of existing fractures do not alter the extension or direction of the hydraulic fracture. Later, Cheng et al. (2015) also studied the effect of pre-existing fractures on hydraulic fracture propagation based on a series of hydraulic fracturing tests, and they proposed two empirical relationships to describe the interactions between pre-existing fractures and hydraulic fractures. De Pater and Beugelsdijk (2005) pointed out that when hydraulic fractures and natural fractures intersect, it may lead to the arrest of fracture propagation, the flow of fluid into discontinuities, the creation of multiple fractures, and the offset of fractures. Similarly, Dehghan et al. (2015) studied the effects of natural fracture dip and strike of pre-existing fractures on hydraulic fracture propagation when the pre-existing fractures intersect with hydraulic fractures, and they found that after interaction with the pre-fracture, hydraulic fracture geometry was significantly affected by differential horizontal principal stress and the pre-fracture dip and strike. Liu et al. (2014) developed a new experimental model to simulate the effect of a natural fracture network on the propagation geometry of hydraulic fractures in naturally fractured formations, and they gave the principle of hydraulic fracture propagation that it follows the least resistance, the most preferential propagation, and the shortest propagation path. The common conclusion from these studies shows that high horizontal stress difference and large approaching angle are conducive for the hydraulic fractures to cross the pre-existing fracture.
So far, most studies have only focused on the effect of natural fractures on hydraulic fracture propagation, while the effects of natural fractures on microseisms induced by hydraulic fracturing are less studied, especially the effects of the interaction between natural fractures and faults on induced microseisms (Dong and De Pater 2001; Zeng and Liu 2010; Behnia et al. 2015; Li et al. 2020). For example, Troiano et al. (2013) provided an interpretation of induced microseisms based on the computation of Coulomb stress changes resulting from fluid injection or withdrawal at depth, and they demonstrated that seismicity was more likely to occur where Coulomb stress varied more. Based on the microseismic monitoring system, Liu et al. (2016) found that the induced microseisms were mainly concentrated at the footwall of the fault, and the initiation and propagation of fractures were much faster under strong disturbance. Shan et al. (2021) studied the effects of prefabricated faults on microseisms induced by hydraulic fracturing through a series of hydraulic fracturing tests on granite samples and demonstrated that the prefabricated faults could lead to an increase in shear fractures and fracture energy. Since the characteristics of natural fractures are closely related to the site selection of geothermal systems, the optimization of reservoir reconstruction, and the measures of environmental protection, it is necessary to study the effects of natural fracture characteristics on the microseisms induced by hydraulic fracturing.
In this study, taking geothermal field data from Qiabuqia as a geological reference, a number of fracture models were developed by using the FracMan software to simulate hydraulic fracturing under different natural fracture distribution characteristics. The main objective of the present work is to explore the effects of different fracture parameters, including the existence of faults, in-situ stress state, fracture occurrence, and fracture distribution near faults, on the microseisms induced by hydraulic fracturing. The findings of this study not only fill the research gap of the effects of natural fractures on induced microseisms, but also provide a theoretical basis for the site selection of geothermal systems and the optimization of reservoir reconstruction.
Numerical simulation method
In this study, the fractures of rock mass are characterized using the models included in the commercial FracMan™ software suite (Golder Associates Inc.). These built-in models have been proven to be able to accurately simulate the regional in-situ stress field and volume pressure fracture network based on the given microseismic data (e.g., Crosta 1997; Johri and Zoback 2013; Nadimi et al. 2018; Zheng et al. 2019; Makedonska et al. 2020). According to the size, orientation, and strength characteristics of natural fractures in actual geothermal field data, the numerical models are established based on the discrete fracture network to simulate the hydraulic fracturing process under different fracture conditions.
The models used in this study have the following three main assumptions: (1) the flow in the fracture is an incompressible fluid and the seepage law conforms to Darcy’s law; (2) the rock is an impermeable matrix and the water only flows in the fracture. The fluid flow in the rock matrix can be ignored; (3) the chemical reaction between fluid and rock matrix and the roughness of fracture are not considered.
The pore pressure of fractures is assumed to decrease linearly from the well-bore pressure in order to simulate the leak-off to the matrix or non-dilatable fractures and the pressure drop due to the resistance of fracture surface to flow. Based on Eq. (1) proposed by Secor Jr and Pollard (1975), the fracture pressure model is established, and the fracture pore pressure, \({P}_{frac}\), can be calculated as follows:
where \({P}_{pump}\) is the pumping pressure; \({\sigma }_{N}\) is the fracture normal stress; d refers to the flow distance from the well intersection point to the fracture element, that is, the distance of water flowing along the hydraulic fracture generated in the injection well; \({d}_{max}\) represents the maximum flow distance, which can be automatically adjusted according to the length of hydraulic fracture at each time step; \(\rho\) is the fluid density; and \(\Delta h\) is the vertical elevation difference from the well-intersection point to the fracture element. Equation (2), proposed by Secor Jr and Pollard (1975), is adopted to calculate the fracture aperture, e. This equation is similar to the width-pressure relation equation in elliptical elastic fracture, as follows:
where \(v\) is the Poisson’s ratio.
The Mohr–Coulomb strength criterion is used to determine the fracture shear strength, \(f\), as shown in Eq. (3) (Griffiths 1990):
where \({S}_{0}\) is the cohesion of the fracture; \({\sigma }_{N}\) is the fracture normal stress, and \({\varphi }_{f}\) is the friction angle.
The extension and propagation of hydraulic fractures are realized based on the critical stress analysis theory. Since hydraulic fracturing is achieved by maintaining a volume balance between the volume of injected water and natural fracture propagation and the volume of developed hydraulic fracture, the distribution of the active fracture network and the direction of fracturing fluid can be determined by judging the activation relationship between the main hydraulic fracture and the natural fracture. Generally, there are two activation relationships between artificial and natural fractures. One activation relationship occurs in the case that the tip pressure of fracturing fluid is less than the normal stress acting on the natural fracture surface, as shown in Fig. 1. As the hydraulic fracture gradually approaches the natural fracture, the fracturing fluid also enters the natural fracture from the hydraulic fracture (Fig. 1a). Since the tip pressure of fracturing fluid is less than the normal stress acting on the natural fracture surface, the fracturing fluid first forces the natural fracture to open wider (from Fig. 1b to c). When the tip pressure reaches a certain threshold, a new secondary fracture is generated (Fig. 1d). As the pressure of the fracturing fluid continues to increase, the fracturing fluid can cause both natural and secondary fractures to expand simultaneously until they can no longer expand (Fig. 1e), after which the fracturing fluid continues to flow along the hydraulic fracture (Fig. 1f). The other activation relationship occurs in the case that the tip pressure of fracturing fluid is greater than the normal stress acting on the natural fracture, as shown in Fig. 2. Different from the first activation relationship (Fig. 1), since the tip pressure of fracturing fluid is greater than the normal stress acting on the natural fracture surface, after filling with natural fracture (Fig. 2b), the fracturing fluid first creates the new secondary fracture instead of expanding the natural fracture (Fig. 2c). Until the fracturing fluid does not allow the secondary fracture to continue to expand, the fracturing fluid begins to expand the natural fracture (Fig. 2d), after which the fracturing fluid continues to flow along the hydraulic fracture (Fig. 2e).

Activation relationship between artificial and natural fractures in the case that the tip pressure of fracturing fluid is less than the normal stress acting on the natural fracture surface, where the orange arrows represent the flow direction of the fracturing fluid, the green lines represent natural fractures, the orange lines represent newly created secondary fractures, the triangular shaped grey area surrounded by yellow lines represents the hydraulic fracture, and σ3 is the minimum principal stress of in-situ stress

Activation relationship between artificial and natural fractures in the case that the tip pressure of fracturing fluid is greater than the normal stress acting on the natural fracture surface, where the orange arrows represent the flow direction of the fracturing fluid, the green lines represent natural fractures, the orange lines represent newly created secondary fractures, the triangular shaped grey area surrounded by yellow lines represents the hydraulic fracture, and σ3 is the minimum principal stress of in-situ stress
In the numerical model, the microseismic points are generated by combining Eq. (4) (Kanamori 1977; Hanks and Kanamori 1979), Eq. (5) (Dershowitz et al. 1996), and Eq. (6) (Kanamori 1977; Dershowitz et al. 1996), as shown below:
where \(G\) is the shear modulus; \(A\) is the shear slip surface area; \(\Delta {u}_{s}\) is the shear displacement; \({K}_{n}\) is the fracture’s normal stiffness; \(\Delta \tau\) is the change of shear stress; \({M}_{0}\) is the seismic moment, and \({M}_{w}\) is the seismic magnitude (instantaneous amplitude).
Hydraulic fracture simulation
As one of the three major geothermal fields that have been identified in the Gonghe Basin, the Qiabuqia geothermal field is located in the eastern part of the Gonghe basin on the Qinghai-Tibet Plateau. With a total area of about 246.9 square kilometers, the Qiabuqia geothermal field is now a very important area with exploration and development potential of hot dry rock geothermal resources in China. In recent years, many studies have been carried out on the geothermal characteristics and enhanced geothermal system of the Qiabuqia geothermal field (e.g., Zhang et al. 2018, 2019; Lei et al. 2019; Shan et al. 2020; Zhu et al. 2022), so there are abundant geothermal data related to the Qiaqia geothermal field available in the existing literature. In this study, taking geothermal field data from Qiabuqia as a geological reference, a series of numerical simulations were carried out to explore the effects of different fracture parameters on the microseisms induced by hydraulic fracturing.
Model setup
To study the effect of faults on hydraulic fracturing, a 3D geothermal reservoir model was first established using FracMan software. The parameters used for building the reservoir model are based on the Qiabuqia geothermal field data in the existing literature (Lei et al. 2019) and the actual field survey data, as listed in Table 1. As shown in Fig. 3, this model is presented in a rectangular shape, with X, Y, and Z dimensions of 6000 m, 5000 m, and 2000 m, respectively, to avoid boundary effects. The total elevation of this reservoir model in the z-dimension is 2000 m, representing a depth from − 2000 to − 4000 m. The buried depth of the reservoir is from 2400 to 3600 m, which is located in the middle of the model. The influence of the overlying rock layers was simulated by applying stress to the upper surface of the model. In the actual situation, there is no fault in the Qiabuqia geothermal reservoir. But to explore the effect of faults on the microseisms induced by hydraulic fracturing, two faults with different geometries were randomly generated and added to the model. In practice, a large number of numerical simulations were performed by adding various faults with randomly generated geometry, and it was found that the simulation results were not affected by the geometry of the fault. These two faults (dark green stripes in Fig. 3b) were distributed in the reservoir model, with a direction of North–North-East and an inclination of about 40°. It is noted that both the geothermal reservoir with faults and the fault-free geothermal reservoir were simulated in this study. Although it is too ideal to run the simulation for the case without faults because faults usually exist in rock reservoirs, the non-fault reservoir scenario was still simulated for three main purposes: (1) to verify the accuracy and availability of the established model through this simplified situation; (2) indeed, there are no faults in the actual Qiabuqia geothermal reservoir; more importantly, (3) taking the case of the fault-free geothermal reservoir as a reference, the variation of fracture propagation in this case was compared to that in the case with faults to highlight the effect of the existence of faults on induced microseismic events.

Schematic of the established 3D geothermal reservoir model: a the side view of the reservoir in the model, where the color legend represents the burial depth and the dark green stripe represents the fault; b a section of the established model where the reservoir is actually buried, roughly located at the burial depth of 2400 m to 3600 m, where the color legend represents the distance from the fault and the dark green stripes represent the faults
In this reservoir model (Fig. 3), the size of each grid unit to grid the domain was set to 50 × 50 × 50 m, and a total of 480,000 grid units were obtained for generation after the gridding. These grids representing the rock matrix contain the properties of rock strength and stress field. The discrete fracture network (DFN) was generated based on the fault characteristics. The input parameters used to establish the DFN are partly derived from Lei et al. (2019) and partly from field measurements of the Qiabuqia geothermal field, as listed in Table 2.
In-situ stress state
In fact, the rock matrix is often coupled with fractures. In this study, the selected fracture group was calculated based on the geometry-based Oda method (Wang et al. 2008). Specifically, the compliance tensor for the fracture was first calculated and then combined with that for the rock matrix. The obtained tensor was inverted to give the corresponding stiffness tensor for the combination of the rock matrix and fracture sets. After that, the stress in the grid was calculated based on various input parameters, such as boundary conditions, material properties, and a strain field output from dynamic upscaling, by using FracStress that can provide a preliminary estimate of the likelihood of fracture slip under different stress conditions (Franzel et al. 2019). In this model, the stress boundary conditions were imposed by applying the stress field to the whole model. The constant gradient stress was also applied to the model, and the bottom of the model should be fixed. Given that the fluid density is 1 000 kg/m3 and the gravitational acceleration is 9.81 m/s2, the main parameters of the strike-slip stress field used in the establishment of the model are shown in Table 3, including the gradients of minimum horizontal stress (SHmin), vertical stress (Sv), and maximum horizontal stress (SHmax) and fluid pore pressure, which are partly derived from Lei et al. (2019) and partly from field measurements of the Qiabuqia geothermal field.
After assigning these parameter values to the model, including rock matrix parameters (Table 1), fracture parameters (Table 2), and initial in-situ stress state (Table 3), a model specially designed for the Qiabuqia geothermal field was set up. On the basis of this model, the models used for different numerical simulations were established by changing the fracture parameters that may affect the induced microseisms. In practice, the appearance of these different models, derived from the model specially designed for the Qiabuqia geothermal field, did not show any change, similar to Fig. 3b. Therefore, the models used to explore the effects of the existence of faults (section “Effect of faults on induced microseisms”), in-situ stress state (section “Effect of in-situ stress state on induced microseisms”), fracture occurrence (section “Effect of fracture occurrence on induced microseisms”), and fracture distribution near faults (section “ Effect of fracture distribution on induced microseisms”) on the induced microseisms are no longer presented one by one in this paper.
It should be noted that the effect of the change of the groundwater level is negligible in the establishment of the models, as the groundwater level in the Qiabuqia geothermal field is relatively stable and its variation is considered to have little effect on hydraulic fracturing, although many studies have demonstrated that the groundwater level plays an important role in earthquakes (e.g., Steeples 2005; Grelle and Guadagno 2009).
Hydraulic fracturing simulation
The hydraulic fracturing simulations were carried out based on the critical stress analysis theory, which involves solving the constitutive relation of material mass in the conservative fracture network (Paris and Sih 1965). Hydraulic fracturing was simulated by maintaining a volume balance between the volume of injected water and natural fracture propagation and the volume of developed hydraulic fracture. In this study, the geothermal field data from Qiabuqia was taken as a geological reference for hydraulic fracturing simulations. According to the Qiabuqia geothermal field data in the existing literature (Lei et al. 2019) and the actual field survey data, the input parameters were chosen for hydraulic fracturing simulations, as listed in Table 4. It is noted that both Young’s modulus and Poisson’s ratio vary with depth. The established model can be divided into three layers: cap rock, reservoir, and substratum. From top to bottom, the values of Young’s modulus are 35, 27, and 40 GPa, respectively, and the values of Poisson’s ratio are 0.22, 0.24, and 0.21, respectively.
The detailed steps of the whole hydraulic fracturing simulation procedure are described as follows. Firstly, the appropriate model is applied to calculate the change in pore pressure due to water injection, which is usually affected by many factors such as pumping pressure, flow distance, and normal stress. The change of pore pressure is often accompanied by the variation of fracture characteristics, which causes the rock mass to break generating new fractures, and the expansion and propagation of the existing fractures. The fracture process of the rock mass follows the Mohr–Coulomb strength criterion (Eq. (3)). During the process of rock fracture and fracture propagation, the numerical values of the pore pressure and the normal stress of the fracture are compared by setting the model, which directly determines how the fracture extends. The magnitude of microseismic events generated during rock fracture and fracture propagation is calculated according to shear slip surface area, shear displacement, shear stress, etc. (Eqs. (4) ~ (6)). The final simulation results can show the expansion and propagation of existing fractures, the distribution of newly generated fractures, as well as the relevant microseismic events, as a result of hydraulic fracturing.
The simulation results of hydraulic fracturing simulation in the case of the fault-free geothermal reservoir are shown in Fig. 4. It can be found that the microseismic events generated by hydraulic fracturing are mainly concentrated near the well site. A total of 847 microseismic events occurred, among which the farthest microseismic event away from the fractured well occurred at 529 m, and the maximum magnitude of the microseismic event was 0.12. The simulation results are in good agreement with the field survey data, verifying the availability and correctness of the model.

Hydraulic fracturing simulation results in the case of the fault-free geothermal reservoir: a position relationship between microseismic events and injection well after hydraulic fracturing; b spatial distribution of microseismic events
In the simulation, the fractures generated by hydraulic fracturing can be generally divided into three types: main hydraulic fractures, activated fractures, and induced fractures. If hydraulic fracturing does not start from natural fractures, some new fractures are created, namely main hydraulic fractures, which are connected to natural fractures. Activated fractures are created when the fracturing fluid flows out of the main hydraulic fractures and communicates with natural fractures. Induced fractures are created due to the sliding and dislocation induced by activated fractures. In our case, the fractures generated by hydraulic fracturing are mainly activated fractures. In general, the propagation direction of these newly generated fractures is approximately perpendicular to the direction of the minimum principal stress of in-situ stress, σ3, (along the direction of the maximum principal stress of in-situ stress, σ1), as shown in Fig. 5, which is consistent with the previous findings presented by Hubbert and Willis (1957).

An overhead diagram of the new fracture network generated by hydraulic fracturing in the case of the fault-free geothermal reservoir, where different colors represent different fracture surfaces, σ1 and σ3 are the maximum and minimum principal stresses of in-situ stress, respectively
The data of microseisms induced by hydraulic fracturing were statistically analyzed, and the results were presented in the form of a bar chart, as shown in Fig. 6. In Fig. 6a, the magnitude of microseismic events is generally small, mostly between − 2.0 and − 0.5. The maximum magnitude is 0.12, but the number of microseismic events with magnitudes greater than 0 accounts for less than 3% of the total, so hydraulic fracturing has little effect on microseisms. In Fig. 6b, the distance between microseismic events and injection wells is mostly between 200 and 450 m. The number of microseismic events with distances greater than 500 m only accounts for about 5% of the total, indicating that the influence scope of hydraulic fracturing is very small. All of these demonstrate that in the case of the geothermal reservoir without faults, hydraulic fracturing has little effect on microseismic events, not causing significant harm in actual engineering projects.

Statistical analysis of (a) microseismic magnitude and (b) the distance between microseismic events and injection wells
Model verification
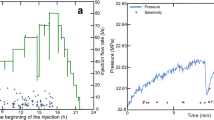
Although the consistent performance of the hydraulic fracturing simulation results in the case of the fault-free reservoir and the actual field survey data proves the effectiveness of the models established in this study, the validity and accuracy of these models were further verified by comparing the numerical simulation results with the field test results of hydraulic fracturing in Qiabuqia geothermal field. The hydraulic fracturing test was conducted on site in the Qiabuqia geothermal field according to the testing procedures described in Haimson and Cornet (2003) and Courtier et al. (2017). In the field test, the operated fracturing pressure was 28.5 ~ 38.7 MPa, the fracturing duration was 88 min, the initial wellhead pressure was 8.31 MPa, the injection rate was 0.5 ~ 1.3 m3/min, and the pump-off pressure was 20.7 MPa. The field reservoir condition was the same as the reservoir model established in this study. The conditions described above for hydraulic fracturing field tests were assigned to the models established in this study for numerical simulation. The validity of the models was then verified by comparing the variation of the wellhead pressure and the induced microseismic events obtained by the field test and numerical simulation. The comparison of the variation of wellhead pressure obtained by the two methods is shown in Fig. 7. It can be seen that the simulation results are in good agreement with the field test results, with a maximum relative error of about 7.3%. During actual hydraulic fracturing, a total of about 160 microseismic events were detected, while a total of 147 microseismic events were statistically generated in the numerical simulation. The maximum magnitude of microseismic events obtained by the two methods is both not more than 0.5. It can be found that the simulation results are coincident with the field hydraulic fracturing results, with a small relative error. This is consistent with the verification results of similar models established using the FracMan software in Crosta (1997), Johri and Zoback (2013), and Makedonska et al. (2020). Accordingly, the effects of different fracture parameters, such as fracture occurrence and fracture distribution, on the microseisms induced by hydraulic fracturing can be studied by using the models established based on the built-in models in the commercial FracMan™ software suite (Golder Associates Inc.).

Comparison of the variation of wellhead pressure obtained by numerical simulation (red line) and that recorded from field hydraulic fracturing test (black line)
Results and discussion
Effect of faults on induced microseisms
To explore the effect of faults on the microseisms induced by hydraulic fracturing, two faults were added to the reservoir model with other fracturing conditions unchanged. The distribution of these two faults can be seen in Fig. 3. The hydraulic fracturing simulation results in the case of the geothermal reservoir with faults (see Fig. 8) show that a total of 735 microseismic events occurred, among which the maximum magnitude is 0.22 and the maximum distance between the microseismic event and injection well is 682 m. Compared to the hydraulic fracturing simulation in the case of the fault-free geothermal reservoir described above, the microseismic points in this case not only gather near the injection well, but also tend to migrate to the fault, as shown in Fig. 8b. In addition, due to the existence of the fault, the propagation direction of the newly generated fractures is generally shifted toward that of the fault, as shown in Fig. 9, which is different from the case without faults (see Fig. 5). All of these indicate that the existence of faults has a significant influence on fracture propagation.

Hydraulic fracturing simulation of the geothermal reservoir with faults: a position relationship between microseismic events and injection well after hydraulic fracturing; b spatial distribution of microseismic events

Diagram of the new fracture network generated by hydraulic fracturing in the case of the geothermal reservoir with faults, where different colors represent different fracture surfaces, the green surface represents the fault, and the gray line represents the injection well
In Fig. 10a, the magnitude of microseismic events is mainly between 0 and 0.5, and the number of microseismic events with magnitudes greater than 0 accounts for about 85% of the total. The maximum magnitude of microseismic events is 0.22, which is higher than the maximum magnitude of 0.12 in the hydraulic fracturing simulation without fault. For the case without faults, the magnitude of microseismic events is mostly concentrated at the middle magnitude and tends to the minimum magnitude (see Fig. 6a). However, affected by the fault, the magnitude of microseismic events, in this case, is mostly concentrated around the maximum magnitude. Therefore, it can be considered that the existence of faults increases the magnitude of microseismic events.

Statistical analysis of (a) microseismic magnitude and (b) the distance between microseismic events and injection wells, obtained from hydraulic fracturing simulation results in the case of the geothermal reservoir with faults
As shown in Fig. 10b, the maximum distance is 682 m, which is greater than that of 529 m in the case without faults. The distance between microseismic events and injection wells can be mainly divided into two parts: 50 ~ 200 m and 450 ~ 650 m. The microseismic points in the 50 ~ 200 m part are mainly concentrated near the well, while the microseismic points in the 450 ~ 650 m part mainly represent the offset microseismic events caused by faults. Compared to the microseismic points are mostly between 200 and 450 m in the case without faults (see Fig. 6b), combined with the observations in Fig. 10, it can be considered that the existence of faults can make the distribution of microseismic events more distant.
To sum up, the existence of faults does affect the propagation direction of the newly generated fractures, causing the fractures to extend in the direction of the fault rather than along the direction of the maximum principal stress of in-situ stress, σ1, as it would have been in the case without faults. The faults in the geothermal reservoir can increase the magnitude of microseismic events and make the distribution of microseismic events farther, which is probably because the existence of faults increases the shear fracture in the process of rock fracture, resulting in greater fracture energy and larger microseismic events (Shan et al. 2020).
Effect of in-situ stress state on induced microseisms
In general, the in-situ stress is represented by three orthogonal principal stresses, namely vertical stress (σV), maximum horizontal stress (σH), and minimum horizontal stress (σh). Based on Anderson’s fault theory (Anderson 1951), the in-situ stress state can be divided into three types by comparing the relationship between these three principal stresses (Zhang et al. 2018): (1) normal faulting stress state (NF): the vertical stress is the greatest principal stress, i.e., σV ≥ σH ≥ σh. In this stress state, the vertical stress drives normal faulting, and fault slip occurs when the minimum stress reaches a sufficiently low value; (2) strike-slip faulting stress state (SS): the vertical stress is the intermediate principal stress, i.e., σH ≥ σV ≥ σh; (3) reverse faulting stress state (RF): the vertical stress is the least principal stress, σH ≥ σh ≥ σV.
In this study, all three different stress states were applied to the model to explore the effects of the in-situ stress state on the microseisms induced by hydraulic fracturing. The stress gradients under these three stress states used for simulation are given in Table 5. The hydraulic fracturing simulation results under normal faulting stress state (NF), strike-slip faulting stress state (SS), and reverse faulting stress state (RF) are shown in Fig. 11, Fig. 12, and Fig. 13, respectively. It is found that there are 64 microseisms under NF, 735 microseisms under SS, and 1292 microseisms under RF. Obviously, the microseismic events occur the most under reverse faulting stress state (RF).

Simulation results of hydraulic fracturing under normal faulting stress state (NF): a position relationship between microseismic events and injection well after hydraulic fracturing; b spatial distribution of microseismic events

Simulation results of hydraulic fracturing under strike-slip faulting stress state (SS): a position relationship between microseismic events and injection well after hydraulic fracturing; b spatial distribution of microseismic events

Simulation results of hydraulic fracturing under reverse faulting stress state (RF): a position relationship between microseismic events and injection well after hydraulic fracturing; b spatial distribution of microseismic events
The magnitudes of microseismic events induced by hydraulic fracturing under NF, SS, and RF stress states are given in Figs. 14a, 15a, and 16a, respectively. It can be seen that the maximum magnitude of microseismic events under NF is 0.23, and there are 28 microseismic events with magnitudes greater than 0, accounting for 43.75% of the total. The maximum magnitude of microseismic events under SS is 0.21, and there are 623 microseismic events with magnitudes greater than 0, accounting for 84.76% of the total. The maximum magnitude of microseismic events under RF is 0.1, and there are 766 microseismic events with magnitudes greater than 0, accounting for 59.29% of the total. Figures 13b, 14b, and 15b, respectively, show the distance between microseismic events and injection wells under NF, SS, and RF. Under NF, all the microseismic events are relatively close to the injection wells, and the maximum distance is only 150 m. Under RF, the distance between microseismic events and injection wells is the farthest, which can reach 1400 m, followed by the maximum distance of 700 m under SS.

Statistical analysis of a microseismic magnitude and b the distance between microseismic events and injection wells under normal faulting stress state (NF)

Statistical analysis of (a) microseismic magnitude and (b) the distance between microseismic events and injection wells under strike-slip faulting stress state (SS)

Statistical analysis of a microseismic magnitude and b the distance between microseismic events and injection wells under reverse faulting stress state (RF)
For natural tectonic earthquakes, the frequency and magnitude of earthquakes generated by the reverse fault are generally high (Ellsworth 2013; Coban and Sayil 2020). When the reverse fault is subjected to horizontal compression, there is an increase in the maximum static friction (Papazachos et al. 2004). When the fault plane is very close to vertical, the occurrence of relative sliding becomes very difficult (Papazachos et al. 2004). However, once the fault is strongly disturbed, relative sliding might occur at certain points of the fault, and the friction coefficient is reduced by sliding (Sayil 2013). The resulting fracture can gradually extend throughout the fault, accompanied by the release of energy, resulting in large earthquake magnitudes (Crowley and Bommer 2006). In other words, the earthquakes generated by the reverse fault require higher tectonic stress. When the accumulated tectonic stress is large enough, the fault system stores more strain energy at this time, which is more prone to large earthquakes (Crowley and Bommer 2006; Sayil 2013).
For the microseismic induced by hydraulic fracturing, under the premise of artificially applying the same energy required to generate formation fractures, the release forms are different under different stress states (Westwood et al. 2017). Under NF, there are a small number of microseismic events, but these microseismic events are concentrated near the well with relatively large magnitudes. Under RF, there are the most microseismic events. These microseismic events have the widest distribution range and the farthest influence distance, but the magnitudes are relatively small. The number of microseismic events under SS is in the middle of that under three stress states. The magnitude of microseismic events under SS is less than that under NF, and the distribution range and influence distance under SS are smaller than those under RF. In general, the total energy of microseisms under RF is higher than that under NF and SS, which is also consistent with the fact that earthquakes generated by reverse faults in natural tectonic earthquakes release more energy (Kelsey et al. 2008; Yang et al. 2021).
It should be noted that in the actual simulation, the hydraulic fracturing simulation was performed for only 24 h based on the established models. Due to the short simulation time, the accumulated energy was not enough to generate a large earthquake (microseismic). In addition, there are some differences between natural tectonic earthquakes and those induced by hydraulic fracturing. Tectonic earthquakes are caused entirely by tectonic stress (Sayil 2013). While for the earthquakes induced by hydraulic fracturing in this study, they are microseisms caused by rock fracture as a result of the change of internal rock pressure due to water injection. These two points result in a slight difference between the simulation results in this study and the actual situation of natural tectonic earthquakes described above. However, the simulation results of this study show that under RF, the total number of induced microseisms is much more than that under the other two stress conditions (NF and SS), and the total energy released (the sum of all the microseismic energy) is the largest, far greater than the other two stress conditions (NF and SS). Therefore, it can be considered that the simulation results are consistent with the actual occurrence of natural tectonic earthquakes.
Effect of fracture occurrence on induced microseisms
During hydraulic fracturing, fracture occurrence plays a very important role in the performance of hydraulic fracturing (Dehghan et al. 2015; Barthwal and van der Baan 2019). Through a series of laboratory rock tests, Dehghan et al. (2015) pointed out that the hydraulic fracture propagation behavior and geometry were affected by natural fracture inclination and strike. Based on this, the effects of fracture occurrence on the microseisms induced by hydraulic fracturing were studied by changing the dip angle of fractures and the positional relationship between fractures and faults.
The dip angles of the fracture used in this study include 0°, 30°, and 60°. The position relationship between fractures and faults can be roughly divided into three types: the parallel relationship between the fracture and the fault, the vertical relationship between the fracture and the fault, and the included angle between the fracture and the fault is 45°. Therefore, a total of nine different cases were used to study the effect of fracture occurrence on the induced microseisms. As shown in Fig. 17, the fracture joint strike in nine different cases is illustrated in the form of a combination of stereonet and rose diagram, where the deep red fan inside indicates the strike of natural fractures and the concentric circles indicate the dip angle of natural fractures, ranging from 0 to 90° from inside to outside. The legend on the right of each subfigure represents the density of natural fractures, and the numbers 1 ~ 9 next to the legend indicate that the density increases gradually. For each subfigure, from left to right, the dip angle of natural fractures are 0°, 30°, and 60°, respectively. Figure 17a, b, and c represents the three position relationships between fractures and faults described above: parallel, vertical, and the included angle of 45°.

Fracture joint strike in nine different cases in terms of the dip angle of fractures and the positional relationship between fractures and faults: a the parallel relationship between fractures and faults, the dip angle is 0°, 30°, and 60° from left to right; b the vertical relationship between fractures and faults, the dip angle is 0°, 30°, and 60° from left to right; c the included angle between the fracture and the fault is 45°, the dip angle is 0°, 30°, and 60° from left to right
Figure 18 shows the variation of the number, the distribution range, and the maximum and average magnitude of the microseisms induced by hydraulic fracturing. It can be seen that the fracture occurrence has a significant influence on the microseisms induced by hydraulic fracturing. In Fig. 18a, when the fracture dip angle increases from 0° to 30° and then to 60°, the corresponding number of microseisms shows an upward trend. When the fracture is perpendicular to the fault, the number of microseisms is the least among the three positional relationships, regardless of the dip angle. As for the distribution range of microseisms, when the fracture dip angle increases from 0° to 30° and then to 60°, the corresponding farthest distance of the microseismic event decreases gradually (see Fig. 18b). When the included angle between the fracture and the fault is 45°, the microseismic farthest distribution distance is always the largest among the three positional relationships, with the same fracture dip angle. When the fracture is perpendicular to the fault, the microseismic farthest distribution distance is always the smallest among the three positional relationships, with the same fracture dip angle. Figure 18c shows that in all nine cases, the maximum magnitude of induced microseisms varies from − 0.5 to 0.5, suggesting that the fracture occurrence has little effect on the maximum magnitude of microseisms. However, the average magnitude varies greatly under different fracture dip angles and different positional relationships between fractures and faults, as shown in Fig. 18d. The maximum value of the average magnitude is about 0 when the fracture dip angle is 0° and the included angle between the fracture and the fault is 45°. When the fracture dip angle is 30° and fractures and faults are perpendicular to each other, the average magnitude reaches a minimum of about − 1.6. It is also found that when the fracture dip angle is 30°, the average magnitude is significantly smaller than that under the other two angles (0° and 60°). Even so, the maximum difference in the average magnitude in these nine cases is only about 1.5. Therefore, from the nine cases in this study, it can be considered that the effect of fracture occurrence on microseismic magnitude is not very obvious, especially on the maximum magnitude.


Variation of (a) the number of induced microseisms, (b) the distribution range of induced microseisms, (c) the maximum magnitude of induced microseisms, and (d) the average magnitude of induced microseisms, with fracture occurrence
Effect of fracture distribution on induced microseisms
According to the possible aggregation of fractures near the fault in the actual situation, four different fracture distributions, A, B, C, and D, with the same number of fractures, were set in this study, from uniform to dense distribution, as shown in Fig. 19. Each subfigure in Fig. 19 represents a top view of the two faults and the distribution of fractures around them, where the green strip represents the fault, and the remaining scatters represent the fractures. A represents the uniform distribution of fractures, and D represents the fractures mainly distributed near the fault. From A to D, the fracture gradually concentrates on the fault. The effects of fracture distribution near the fault on induced microseisms were studied by comparing the characteristics of induced microseisms under these four fracture distributions.

Top views of the two faults (green strips) and the distribution of fractures around them, where A, B, C, and D represent four different fracture distributions and the fracture gradually concentrates on the fault from A to D
As shown in Fig. 20a, the fracture distribution near faults has a great influence on the maximum magnitude and the farthest distribution distance of induced microseisms. With the same number of fractures, the maximum magnitude of induced microseisms increases as the fractures are more concentrated near the fault, although the maximum magnitude under these four fracture distributions is only 0.22. With the increase of fracture concentration to the fault, the farthest distribution distance of induced microseisms also increases, up to 704 m under the fracture distribution D. Figure 20b shows that the variation trend of the average magnitude and average distance of microseismic events is similar to that of the maximum magnitude and farthest distribution distance of microseismic events.

Under four different fracture distributions: a maximum magnitude and farthest distribution distance of microseismic events; b average magnitude and an average distance of microseismic events
Under the fracture distribution D, the fractures are concentrated near the fault, and the induced microseismic events have the farthest distribution distance and the largest magnitude. This can be explained by the fact that during hydraulic fracturing, the fracturing fluid continues to expand outward, and after activating the natural fractures, some new fractures continue to be created, leading to more microseismic events. However, under the fracture distribution A, the fractures are almost uniformly distributed, and the fracture network enhances the hydraulic connectivity in the deep underground. During hydraulic fracturing, the fracturing fluid only needs to communicate with the natural fracture network. The effect of improving hydraulic connectivity can be achieved without or with few new fractures. Therefore, under the fracture distribution A, the microseismic events induced by hydraulic fracturing have the closest distribution distance and the smallest magnitude.
Conclusions
In this study, taking the Qiabuqia geothermal field data as a reference, the models were set up for different numerical simulations based on the built-in models in the commercial FracMan™ software suite. Through these established models, a series of numerical simulations were carried out to investigate the effects of different fracture parameters, including the existence of faults, in-situ stress state, fracture occurrence, and fracture distribution near faults, on the magnitude and distribution range of the microseisms induced by hydraulic fracturing. According to the numerical simulation results under different variables, the following conclusions are derived from this work:
-
1.
Compared with the case of the fault-free geothermal reservoir, the existence of faults does affect the propagation direction of the newly generated fractures, causing the fractures to extend toward the fault. The faults in the geothermal reservoir increase the magnitude of microseismic events and make the distribution of microseismic events farther, which is probably because the existence of faults increases the shear fracture in the process of rock fracture, producing greater fracture energy.
-
2.
Under three different in-situ stress states of NF, SS, and RF, the magnitude of induced microseisms and the distance between microseismic events and injection wells are different, mainly due to the different forms of energy release. The total energy of microseisms under RF is generally higher than that under NF and SS. Under RF, there are the most microseismic events, with a total of 1292, and these microseismic events have the widest distribution range and the farthest influence distance, but the magnitudes are relatively small, with a maximum magnitude of 0.1. Under NF, the number of microseismic events is the least, with only 28, and these microseismic events are concentrated near the well, with the farthest distribution distance of only 150 m, but there is the largest magnitude of microseismic events of 0.23.
-
3.
Based on nine different cases in this study, the fracture occurrence, in terms of the fracture dip angle and the positional relationship between fractures and faults, can be considered to have a significant effect on the microseisms induced by hydraulic fracturing. When the fracture dip angle increases from 0 to 30° and then to 60°, the corresponding number of induced microseisms gradually increases, but the corresponding farthest distribution distance of microseismic events gradually decreases. With the same fracture dip angle, the microseismic farthest distribution distance is always the largest when the included angle between the fracture and the fault is 45°, and the microseismic farthest distribution distance is always the smallest when the fracture is perpendicular to the fault. The effect of fracture occurrence on microseismic magnitude is not very obvious, especially on the maximum magnitude.
-
4.
With the same number of fractures, as the fracture concentration to the fault increases, both the maximum magnitude and the farthest distribution distance of the induced microseisms induced increase.
-
5.
In the actual geothermal system site selection and reservoir reconstruction optimization, the fault, the area of RF stress state, and the excessive concentration of natural fractures should be avoided as far as possible. In this way, sufficient fracture networks generated by hydraulic fracturing can be satisfied to ensure the optimization of reservoir reconstruction, and meanwhile, the excessive magnitude of induced microseisms can be avoided by maintaining the magnitude of microseismic events within a controllable range.
Data Availability
The data sets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
Abbreviations
- \(A\) :
-
Shear slip surface area
- \(e\) :
-
Fracture aperture
- d :
-
Flow distance from the well intersection point to the fracture element
- \({d}_{max}\) :
-
Maximum flow distance from the well intersection point to the fracture element
- \(f\) :
-
Fracture shear strength
- \(G\) :
-
Shear modulus
- \(\Delta h\) :
-
Vertical elevation difference from the well-intersection point to the fracture element
- \({K}_{n}\) :
-
Fracture normal stiffness
- Ks:
-
Fracture shear stiffness
- \({M}_{0 }\) :
-
Seismic moment
- \({M}_{w}\) :
-
Seismic magnitude
- \({P}_{frac}\) :
-
Fracture pore pressure
- \({P}_{pump}\) :
-
Pumping pressure
- \(\Delta \tau\) :
-
Change in shear stress
- \(\Delta {u}_{s}\) :
-
Shear displacement
- \({\sigma }_{N}\) :
-
Normal stress on the fracture end element
- \(\rho\) :
-
Fluid density
- \(v\) :
-
Poisson’s ratio
- \({\varphi }_{f}\) :
-
Friction angle
- S Hmax :
-
Maximum horizontal stress gradient
- S Hmin :
-
Minimum horizontal stress gradient
- S v :
-
Vertical stress gradient
- σ H :
-
Maximum horizontal stress
- σ h :
-
Minimum horizontal stress
- σ V :
-
Vertical stress
- σ 1 :
-
Maximum principal stress of in-situ stress
- σ 3 :
-
Minimum principal stress of in-situ stress
- DFN:
-
Discrete fracture network
- NF:
-
Normal faulting stress state
- RF:
-
Reverse faulting stress state
- SS:
-
Strike-slip faulting stress state
References
Anderson E. M. (1951). The dynamics of faulting and dyke formation with applications to britain ([2d ed. rev.]). Oliver and Boyd. Retrieved May 24 2023 from http://books.google.com/books?id=j57PAAAAMAAJ
Anikiev D, Valenta J, Staněk F, Eisner L (2014) Joint location and source mechanism inversion of microseismic events: benchmarking on seismicity induced by hydraulic fracturing. Geophys J Int 198(1):249–258
Barthwal H, van der Baan M (2019) Role of fracture opening in triggering microseismicity observed during hydraulic fracturingFracturing-induced microseismicity. Geophysics 84(3):105–118
Behnia M, Goshtasbi K, Zhang G, MirzeinalyYazdi SH (2015) Numerical modeling of hydraulic fracture propagation and reorientation. Eur J Environ Civ Eng 19(2):152–167
Cheng W, Jin Y, Lin Q, Chen M, Zhang Y, Diao C, Hou B (2015) Experimental investigation about influence of pre-existing fracture on hydraulic fracture propagation under tri-axial stresses. Geotech Geol Eng 33(3):467–473
Coban KH, Sayil N (2020) Different probabilistic models for earthquake occurrences along the North and East Anatolian fault zones. Arab J Geosci 13:1–16
Courtier J, Chandler K, Gray D, Martin S, Thomas R, Wicker J, Ciezobka J (2017) Best practices in designing and executing a comprehensive hydraulic fracturing test site in the Permian Basin. Paper presented at the SPE/AAPG/SEG Unconventional Resources Technology Conference, Austin, Texas, USA, July 2017. https://doi.org/10.15530/URTEC-2017-2697483
Crosta G (1997) Evaluating rock mass geometry from photographic images. Rock Mech Rock Eng 30(1):35–58
Crowley H, Bommer JJ (2006) Modelling seismic hazard in earthquake loss models with spatially distributed exposure. Bull Earthq Eng 4:249–273
De Pater CJ, Beugelsdijk LJL (2005) June. Experiments and numerical simulation of hydraulic fracturing in naturally fractured rock. In Alaska Rocks 2005, The 40th US Symposium on Rock Mechanics (USRMS). OnePetro
Dehghan AN, Goshtasbi K, Ahangari K, Jin Y (2015) The effect of natural fracture dip and strike on hydraulic fracture propagation. Int J Rock Mech Min Sci 75:210–215
Dershowitz W, Lee G, Geier J, Foxford T, LaPointe P, Thomas A (1996) FracManTM: interactive discrete feature data analysis, geometric modeling, and exploration simulation. User Documentation, version 2.5. Golder Associates, Redmond, Washington
Dong CY, De Pater CJ (2001) Numerical implementation of displacement discontinuity method and its application in hydraulic fracturing. Comput Methods Appl Mech Eng 191(8–10):745–760
Ellsworth WL (2013) Injection-induced earthquakes. Science 341(6142):1225942
Franzel M, Jones S, Jermyn IH, Allen M, McCaffrey K (2019) Statistical characterisation of fluvial sand bodies: implications for complex reservoir models. Petroleum Geostatistics 2019(1):1–5
Grelle G, Guadagno FM (2009) Seismic refraction methodology for groundwater level determination:“water seismic index.” J Appl Geophys 68(3):301–320
Griffiths DV (1990) Failure criteria interpretation based on Mohr-Coulomb friction. J Geotech Eng 116(6):986–999
Haimson BC, Cornet FH (2003) ISRM suggested methods for rock stress estimation—part 3: hydraulic fracturing (HF) and/or hydraulic testing of pre-existing fractures (HTPF). Int J Rock Mech Min Sci 40(7–8):1011–1020
Hanks TC, Kanamori H (1979) A moment magnitude scale. J Geophys Res Solid Earth 84(B5):2348–2350
Hubbert MK, Willis DG (1957) Mechanics of hydraulic fracturing. Trans AIME 210(01):153–168
Huenges E, Ledru P (eds) (2011) Geothermal energy systems: exploration, development, and utilization. John Wiley & Sons
Johri M, Zoback MD (2013) The evolution of stimulated reservoir volume during hydraulic stimulation of shale gas formations. Paper presented at the SPE/AAPG/SEG Unconventional Resources Technology Conference, Denver, Colorado, USA, August 2013. https://doi.org/10.1190/urtec2013-170
Kanamori H (1977) The energy release in great eartquakes. J Geophys Res 82(20):2981–2987
Kelsey HM, Sherrod BL, Nelson AR, Brocher TM (2008) Earthquakes generated from bedding plane-parallel reverse faults above an active wedge thrust, Seattle fault zone. Geol Soc Am Bull 120(11–12):1581–1597
Kruger P (1976) Geothermal energy. Ann Rev Energy 1(1):159–180
Lamont N, Jessen FW (1963) The effects of existing fractures in rocks on the extension of hydraulic fractures. J Petrol Technol 15(02):203–209
Lei Z, Zhang Y, Yu Z, Hu Z, Li L, Zhang S, Fu L, Zhou L, Xie Y (2019) Exploratory research into the enhanced geothermal system power generation project: the Qiabuqia geothermal field, Northwest China. Renew Energy 139:52–70
Li ZQ, Li XL, Yu JB, Cao WD, Liu ZF, Wang M, Liu ZF, Wang XH (2020) Influence of existing natural fractures and beddings on the formation of fracture network during hydraulic fracturing based on the extended finite element method. Geomech Geophys Geo-Energy Geo-Resour 6(4):1–13
Liu Z, Chen M, Zhang G (2014) Analysis of the influence of a natural fracture network on hydraulic fracture propagation in carbonate formations. Rock Mech Rock Eng 47(2):575–587
Liu J, Liu Z, Wang S, Shi C, Li Y (2016) Analysis of microseismic activity in rock mass controlled by fault in deep metal mine. Int J Min Sci Technol 26(2):235–239
Liu Z, Yang J, Yang L, Ren X, Peng X, Lian H (2021) Experimental study on the influencing factors of hydraulic fracture initiation from prefabricated crack tips. Eng Fract Mech 250:107790
Makedonska N, Jafarov E, Doe T, Schwering P, Neupane G, EGS Collab Team (2020) Simulation of injected flow pathways in geothermal fractured reservoir using discrete fracture network model. In Proceedings of the 45th Workshop on Geothermal Reservoir Engineering, Stanford, p 10–12
Maxwell SC, Jones M, Parker R, Miong S, Leaney S, Dorval D, D'Amico D, Logel J, Anderson E, Hammermaster K (2009) Fault activation during hydraulic fracturing. In SEG Technical Program Expanded Abstracts 2009. Society of Exploration Geophysicists, p 1552–1556
Nadimi S, Forbes B, Finnila A, Podgorney R, Moore J, McLennan JD (2018) Hydraulic fracture/shear stimulation in an EGS Reservoir: Utah FORGE Program. Paper presented at the 52nd U.S. Rock Mechanics/Geomechanics Symposium, Seattle, Washington, June 2018
Papazachos BC, Scordilis EM, Panagiotopoulos DG, Papazachos CB, Karakaisis GF (2004) Global relations between seismic fault parameters and moment magnitude of earthquakes. Bull Geol Soc Greece 36(3):1482–1489
Paris PC, Sih GC (1965) Stress analysis of cracks. ASTM stp 381:30-81
Qiao J, Tang X, Hu M, Rutqvist J, Liu Z (2022) The hydraulic fracturing with multiple influencing factors in carbonate fracture-cavity reservoirs. Comput Geotech 147:104773
Quosay AA, Knez D, Ziaja J (2020) Hydraulic fracturing: new uncertainty based modeling approach for process design using Monte Carlo simulation technique. PLoS One 15(7):e0236726
Ries R, Brudzinski MR, Skoumal RJ, Currie BS (2020) Factors influencing the probability of hydraulic fracturing-induced seismicity in Oklahoma. Bull Seismol Soc Am 110(5):2272–2282
Sayil N (2013) Long-term earthquake prediction in the Marmara region based on the regional time-and magnitude-predictable model. Acta Geophys 61:338–356
Secor DT Jr, Pollard DD (1975) On the stability of open hydraulic fractures in the Earth’s crust. Geophys Res Lett 2(11):510–513
Shan K, Zhang Y, Zheng Y, Li L, Deng H (2020) Risk assessment of fracturing induced earthquake in the Qiabuqia Geothermal Field, China. Energies 13(22):5977
Shan K, Zhang Y, Zheng Y, Cheng Y, Yang Y (2021) Effect of fault distribution on hydraulic fracturing: Insights from the laboratory. Renew Energy 163:1817–1830
Steeples DW (2005) Shallow seismic methods. In: Rubin Y. Hubbard SS (eds) Hydrogeophysics. Water Science and Technology Library, vol 50. Springer, Dordrecht. https://doi.org/10.1007/1-4020-3102-5_8
Troiano A, Di Giuseppe MG, Troise C, Tramelli A, De Natale G (2013) A Coulomb stress model for induced seismicity distribution due to fluid injection and withdrawal in deep boreholes. Geophys J Int 195(1):504–512
Vermylen JP, Zoback MD (2011) Hydraulic fracturing, microseismic magnitudes, and stress evolution in the Barnett Shale, Texas, USA. Paper presented at the SPE Hydraulic Fracturing Technology Conference, The Woodlands, Texas, USA, January 2011. https://doi.org/10.2118/140507-MS
Wang H, Forster C, Deo M (2008) Simulating naturally fractured reservoirs: comparing discrete fracture network models to the upscaled equivalents. In Presentation at the AAPG Annual Convention, San Antonio, Texas
Warpinski NR, Wolhart SL, Wright CA (2004) Analysis and prediction of microseismicity induced by hydraulic fracturing. SPE J 9(01):24–33
Westwood RF, Toon SM, Styles P, Cassidy NJ (2017) Horizontal respect distance for hydraulic fracturing in the vicinity of existing faults in deep geological reservoirs: a review and modelling study. Geomech Geophys Geo-Energy Geo-Resour 3(4):379–391
Yang H, Quigley M, King T (2021) Surface slip distributions and geometric complexity of intraplate reverse-faulting earthquakes. GSA Bull 133(9–10):1909–1929
Zeng L, Liu H (2010) Influence of fractures on the development of low-permeability sandstone reservoirs: a case study from the Taizhao district, Daqing Oilfield, China. J Petrol Sci Eng 72(1–2):120–127
Zhang SQ, Yan WD, Li DP, Jia XF, Zhang SS, Li ST, Fu L, Wu HD, Zeng ZF, Li ZW, Mu JQ (2018) Characteristics of geothermal geology of the Qiabuqia HDR in Gonghe Basin, Qinghai Province. Geol China 45(6):1087–1102
Zhang C, Jiang G, Jia X, Li S, Zhang S, Hu D, Hu S, Wang Y (2019) Parametric study of the production performance of an enhanced geothermal system: a case study at the Qiabuqia geothermal area, northeast Tibetan plateau. Renew Energy 132:959–978
Zhang F, Yin Z, Chen Z, Maxwell S, Zhang L, Wu Y (2020) Fault reactivation and induced seismicity during multistage hydraulic fracturing: microseismic analysis and geomechanical modeling. SPE J 25(02):692–711
Zheng Y, Shan K, Xu Y, Chen X (2019) Numerical simulation of mechanical characteristics of concrete face rockfill dam under complicated geological conditions. Arab J Geosci 12:1–6
Zheng Y, Baudet BA, Delage P, Pereira JM, Sammonds P (2022) Pore changes in an illitic clay during one-dimensional compression. Géotechnique 1–16. https://doi.org/10.1680/jgeot.21.00206
Zhu J, Hu K, Lu X, Huang X, Liu K, Wu X (2015) A review of geothermal energy resources, development, and applications in China: current status and prospects. Energy 93:466–483
Zhu YQ, Li DQ, Zhang QX, Zhang X, Liu ZJ, Wang JH (2022) Characteristics of geothermal resource in Qiabuqia, Gonghe Basin: evidence from high precision resistivity data. Ore Geol Rev 105053. https://doi.org/10.1016/j.oregeorev.2022.105053
Funding
This study was financially supported by the National Natural Science Foundation of China (Grant no: 52239008), the National Key Research and Development Program of China (Grant no: 2018YFB1501803), the National Natural Science Foundation of China (Grant no: 41772238) and New Energy Program of Jilin Province (Grant no: SXGJSF2017-5).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Shan, K., Zheng, Y., Zhang, Y. et al. Effects of different fracture parameters on microseisms induced by hydraulic fracturing. Bull Eng Geol Environ 82, 231 (2023). https://doi.org/10.1007/s10064-023-03240-1
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10064-023-03240-1