
Abstract
In this paper, we propose a design method for a rollover prevention controller using front and rear wheel steering that takes into account the variation of vehicle velocity. First, we propose a new description for vehicles. The description is suitable for controller design in case when vehicle velocity varies. Next, based on the description, we develop a new rollover prevention control scheme. In the vehicle control system using the developed controller, the lateral acceleration tracks the estimated crosswind disturbance in the case of the high risk of rollover so that the risk of rollover can be reduced. Finally, numerical simulations are carried out to demonstrate the usefulness of the proposed controller.











Similar content being viewed by others

References
Anubi OM, Crane CD (2013) Roll stabilization of road vehicles using a variable stiffness suspension system. Vehic Syst Dyn 51(12):1894–1917
Zhu Q, Ayalew B (2014) Predictive roll, handling and ride control of vehicles via active suspensions. In: Proceedings of the American Control Conference (ACC), Portland, Oregon, USA, pp 2102–2107
Pages DO, El Hajjaji A (2015) Robust control with parameter uncertainties for vehicle chassis stability in critical situation. In: Proceedings of the IEEE 54th annual conference on decision and control, Osaka, Japan, pp 209–214
Yim S (2018) Design of preview controllers for active roll stabilization. J Mech Sci Technol 32(4):1805–1813
Chen L-K, Cheng C-F, Luo M-F (2008) Rollover prevention through model predictive direct yaw moment control. In: Proceedings of advanced vehicle control, pp 721–726
Yoon J, Kim D, Yi K (2009) Design of a rollover index-based vehicle stability control scheme. Vehicle Syst Dyn 2009:459–475
Imine H, Fridman LM, Madani T (2012) Steering control for rollover avoidance of heavy vehicles. IEEE Trans Veh Technol 61(8):3499–3509
Alberding MB, Tjonnas J, Johasen TA (2014) Integration of vehicle yaw stabilization and rollover prevention through nonlinear hierarchical control allocation. Vehicle Syst Dyn 52(12):1607–1621
Dahniani H, Pagbs O, EI-Hajjaji A, Daraoui N (2014) Observer-based robust control of vehicle dynamics for rollover mitigation in critical situations. IEEE Trans Intell Transport Syst 15(1):274–284
Dal-Pogetto VF, Serpa AL (2016) Vehicle rollover avoidance by application of gain-scheduled LQR controllers using state observers. Vehicle Syst Dyn 54(2):191–209
Jin Z, Zhang L, Zhang J, Khajepour A (2016) Stability and optimised control of tripped and untripped vehicle rollover. Vehicle Syst Dyn 54(10):1405–1427
Shim T, Ghike C (2007) Understanding the limitations of different vehicle models for roll dynamics studies. Vehicle Syst Dyn 45(3):191–216
Braghin F, Cheli F, Corradi R, Tomasini G, Sabbioni E (2008) Active anti-rollover system for heavy-duty road vehicles. Vehicle Syst Dyn 46:653–668
Proppe C, Wetzel C (2010) A probabilistic approach for assessing the crosswind stability of ground vehicles. Vehicle Syst Dyn 48:411–428
Ishio J, Ichikawa H, Kano Y, Abe M (2008) Vehicle-handling quality evaluation through model-based driver steering behavior. Vehicle Syst Dyn 46:549–560
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
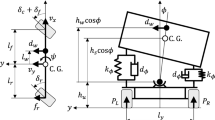
The equation of motion for \({\varvec{q}}_{\phi } \left( t \right)\) is given by [12]
From Eqs. (1), (2) and (29), we have
From Eqs. (1), (29) and (30), the dynamic equation (3) can be derived.
About this article

Cite this article
Yamamoto, K., Ejiri, A. & Oya, M. Rollover prevention control of vehicles with crosswind disturbance. Artif Life Robotics 26, 250–258 (2021). https://doi.org/10.1007/s10015-020-00666-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-020-00666-8