
Abstract
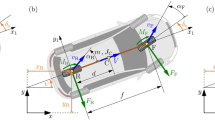
In this paper we present an optimised 3 degrees-of-freedom non-linear dynamic model of a four-wheel-steering (4WS) vehicle. As variables, we retain the lateral velocity V, the rolling velocity p and yaw velocity r. The front steer angle δf and rear steer angle δr are considered to be linear functions of the steering wheel angle θs and of dθs/dt, the proportionality parameters being k 1f, k 2f for δf and k 1r, k 2r for δr. The parameters k 1f, k 2f, k 1r, k 2r are optimised by use of the BOX mathematical algorithm. In a first optimisation loop we minimise the sideslip angle β of the vehicle and in a second optimisation loop we assure, that the resultant (taken in the centre of gravity of the vehicle) of all the transversal forces F y applied on the wheels of the vehicle (reaction forces contained in the road plane), give a component F yx along the longitudinal axis of the vehicle, that takes a non negative value. This assures, that the motor of the vehicle will not waste fuel to overcome resistance forces originating from the steering system of the vehicle. A numerical application is also presented for a 4WS vehicle negotiating a curve at constant velocity. The results are compared to those obtained by two models frequently used in the literature. The comparison testifies on the superiority of our model for the application presented here.
Zusammenfassung
In diesem Beitrag wird ein optimiertes nicht-lineares dynamisches Model eines vierradgelenkten Fahrzeuges mit 3 Freiheitsgraden präsentiert. Als Variable wird die Seitenwindgeschwindigkeit V, die Nickenwinkelgeschwindigkeit p und die Gierenwinkelgeschwindigkeit r beibehalten. Der Vorderradeinschlagwinkel δf und der Hinterradeinschlagwinkel δr werden als lineare Funktionen des Lenkradwinkels θs und dθs/dt, angenommen, mit Proportionalitätsparameter k 1f, k 2f für δf und k 1r, k 2r für δr. Die Parameter k 1f, k 2f, k 1r, k 2r sind für den mathematischen Algorithmus BOX optimiert. In einer ersten Optimierungsschleife wird der Seitenrutschwinkel β minimiert und in einer zweiten Optimierungsschleife wird gesichert, die Resultierende (am Schwerpunkt des Fahrzeuges angenommen), aller auf den Fahrzeugrädern wirkenden Querkräften F y (Reaktionskräfte sind in der Straßenebene enthalten) eine Komponente F yx entlang der Fahrzeuglängsachse ergeben, die keinen negativen Wert annimmt. Damit wird gewährleistet, das der Fahrzeugmotor nicht Kraftstoff verschwendet, um die Widerstandskräfte des Fahrzeuglenksystems zu überwinden. Eine numerische Applikation für ein Fahrzeug, das eine Kurve mit konstanter Geschwindigkeit fährt, wird präsentiert. Die Resultate werden mit zwei Modellen verglichen, die häufig in der Literatur benutzt werden. Der Vergleich bezeugt die Überlegenheit unseres Modells für die hier präsentierte Applikation.
Similar content being viewed by others


Author information
Authors and Affiliations
Additional information
Received: 9. January 2001
Rights and permissions
About this article
Cite this article
Spentzas, K., Alkhazali, I. & Demic, M. Dynamics of four-wheel-steering vehicles. Forsch Ingenieurwes 66, 260–266 (2001). https://doi.org/10.1007/s100100100061
Issue Date:
DOI: https://doi.org/10.1007/s100100100061