
Abstract
Over recent years, the number of battery electric vehicles (BEVs) has drastically increased due to new European Union (EU) regulations. These regulations force vehicle manufacturers to adjust their product range in order to fulfill the imposed carbon dioxide limits. Such an adjustment enforces the usage of battery electric vehicles. However, research into the optimal BEV architectures and topologies is still in progress. Therefore, the aim of this paper is an analysis of all the current electric vehicle topologies. From this analysis, the authors identify different basic battery shapes. Subsequently, these shapes are used to describe the impact of the battery on the passenger compartment. As an initial result of this analysis, the authors create a new denomination method, via which it is possible to cluster the battery topologies. In a second step, the collected data is clustered using the novel denomination method. Finally, this paper presents the benchmark topologies for the analyzed segments.
Zusammenfassung
In den letzten Jahren hat die Zahl der batterieelektrischen Fahrzeuge (BEVs) aufgrund neuer Vorschriften der Europäischen Union (EU) drastisch zugenommen. Diese Vorschriften zwingen die Fahrzeughersteller ihre Produktpalette anzupassen, um die vorgeschriebenen CO2-Grenzwerte zu erfüllen. Diese Anpassung erzwingt den Einsatz von BEVs. Die Analyse optimaler BEV Architekturen und Topologie ist nicht abgeschlossen und noch Bestandteil der Forschung. Daher ist das Ziel dieses Beitrags eine Analyse der aktuellen Elektrofahrzeug-Topologien. Die Autoren identifizieren aus dieser Analyse verschiedene Batterieformen. Diese Formen werden verwendet, um den Einfluss der Batterie auf den Fahrgastraum zu beschreiben. Die Autoren erstellen als erstes Ergebnis dieser Analyse eine neue Bezeichnungsmethode, die eine Kategorisierung der Batterietopologien ermöglicht. In einem zweiten Schritt werden die gesammelten Daten mit Hilfe der neuartigen Bezeichnungsmethode kategorisiert. Abschließend werden die Benchmark-Topologien für die analysierten Segmente vorgestellt.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
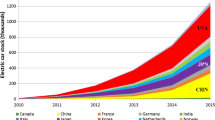
Over recent years, the number of BEVs has drastically increased: in Germany, the number of licensed electric vehicles has risen from 514 in 2010 to 36,062 in 2018 [1] as shown in Fig. 1.

Newly registered BEVs in Germany divided by year [1]
This tendency is mostly due to the EU \(\mathrm{CO}_{2}\) emission standards for passenger vehicles. These regulations define \(\mathrm{CO}_{2}\) targets for each manufacturer according to the average weight of their fleet [2]. In order to comply with the imposed limits, manufacturers can add BEVs or plug-in hybrid electric vehicles (PHEVs) to their fleet. Since BEVs do not cause local CO2-emissions, according to the regulation they drastically reduce the average fleet emissions, allowing car producers to meet the imposed targets. While BEVs provide a solution to meet these targets, they also present a major challenge when it comes to defining their architecture and topology.
The challenge in defining the optimal BEV architecture derives from the fact, that the powertrain components are completely different from those of internal combustion engine vehicles (ICEVs). In comparison to combustion engines, electric machines offer a higher power density [3] and therefore occupy a much smaller volume. Furthermore, an electric machine can provide high torque over almost the entire speed range and can consequently operate with fixed ratio gearboxes or even with gearless direct drives [4]. This flexibility allows concepts such as one machine per axle or even one machine per wheel, which would be inconceivable for combustion engines. The impact of the machine on the topology is still small compared with the battery, as this is the largest component of the electric powertrain. By varying the battery shape, it is possible to achieve different capacities and dimensions, thus affecting the vehicle dimensions, the energy consumption, and the vehicle dynamics. These aspects contribute to the complexity of identifying an optimal BEV topology.
In order to describe the BEV topologies, it is first necessary to analyze the existing vehicles. The authors focus on BEVs produced starting from 2012 and mostly licensed in the European Union. From this analysis, it is possible to group the topologies into different categories according to the shape and position of their main components. The results of this analysis will be employed as a basis for future research, which will aim to describe the influence of the traction battery on the overall BEV packaging.
2 BEV topologies
In the first part of this work, the authors identify the relevant components for BEV topologies. The dimensions of these components and their respective position define the topology. Subsequently, the authors describe the different design strategies, which are currently used for BEVs.
2.1 Key topological components
The key components are the main elements of the BEV powertrain. These components enable the transformation of electrical energy into mechanical energy and vice versa:
-
traction battery
-
electric machine
-
gearbox
-
power electronics
-
charger
The traction battery supplies the other powertrain components with energy and consists of several modules, which in turn consist of interconnected basic cells [5, p. 18]. The leading technology for the base cell production is lithium-ion chemistry [5, p. 19]. This offers a particularly high degree of efficiency as well as a high power and energy density [6, p. 79]. For lithium-ion cells, different geometries exist [7]. The most important are pouch cells, prismatic cells, and cylindrical cells. Traction batteries usually have a nominal voltage of around 400 V [8], although low voltage battery concepts are also being researched [9].
The electric machine transforms the power from the battery into mechanical energy. Two main technologies are suitable for this scope: synchronous and asynchronous machines [6, p. 63]. They can be placed with a high degree of design freedom, due to their small dimensions. For axles with only one motor, the machine is usually coupled with a fixed gearbox ratio. A direct connection between the machine and the wheels is also possible, but it would demand a machine with higher torque. The higher torque demand would be reflected in much larger machine dimensions.
While the battery provides the power in the form of direct voltage and direct current (DC), an alternative voltage is necessary to operate the electric machine [10, p. 189]. The power electronics control the high-voltage direct current provided by the battery and convert it into high-voltage alternating current (AC) for the machine (DC-AC) [5, p. 88]. In the recuperation phase, the power electronics carry out the reverse transformation, thus allowing the recharging of the battery (AC-DC). Finally, to supply the vehicle’s low voltage electric system, a DC-DC converter is needed.
The charger is the component required to recharge the battery. It transforms the charging voltage into the DC voltage of the battery. There are several charger types, which are classified according to the type and strength of transmitted charging voltage, charging capacity, and shape [11].
2.2 Design strategies
An important distinction has to be made between purpose and conversion design [6. pp. 20–21] since the applied design strategy influences the vehicle topology.
A conversion design defines an electric vehicle derived from an ICEV platform [5, p. 54]. The key components (electric machine and traction battery) are placed in the free spaces resulting from the elimination of combustion engine, gearbox, and exhaust system. This means that the already existing internal combustion platform defines the position of the electric components, i.e. the topology. An example is the Volkswagen e‑Golf. This strategy reduces the development costs but does not offer an optimal solution, as the used platform was originally designed for an ICEV.
The second possibility is the purpose design strategy. In this case, the vehicle is based on a platform, which is designed exclusively for BEV vehicles. An example is the BMW i3. With this strategy, the dimensions and position of the main components of the topology, such as the battery, define the platform. The authors analyze both purpose design and conversion design, as the lack of data does not allow a single analysis of the purpose design vehicles.
3 Data preparation
The data preparation has two main aims: firstly, the collection of vehicle and component data, such as vehicle dimensions, machine power, and gearbox ratio. Secondly, the identification of the vehicle topology. In this paper, the authors only consider BEVs starting from model year 2012.
3.1 Data collection
The information from the research work is stored in a database for easier further processing and documentation purposes. The authors divide the database into three main sections:
-
general vehicle data
-
component data
-
topology
The general vehicle data section contains information on the vehicle dimensions, together with the brand and year of production. Vehicle mass, consumption, range, and speed are also provided here. The authors use these parameters to categorize the vehicles, identify competitors and compare the data.
The component data contains information on the topology components presented in the previous chapter. Examples are the number of machines, the machine and battery technology, and the charger plug-in type. This section also contains the physical values describing the main components like electric machine power and torque, battery capacity and voltage level.
The topology section contains the relative positions of the different components. This section includes a graphical representation of the components’ position in each vehicle. The representation is implemented in a uniform way to allow the comparison between the topologies.
3.2 Source selection
The sources used to collect the data are the Allgemeine Deutsche Automobil Club (ADAC) [12], a2mac1 [13] and the vehicle rescue cards database of the Verband der Automobilindustrie (VDA) [14].
The ADAC is an automobile association and its online database contains general vehicle data for most of the vehicles sold in Germany. A2mac1 is a benchmarking site, which contains more than 700 vehicle disassemblies. The components of the disassembled vehicles are documented in more than 28 million images [13]. The VDA rescue cards offer orientation aid to the topological and architecture analysis, as they show rough component positioning within the vehicle [14].
For the general vehicle data, the authors use the ADAC database, as it is highly reliable. Every vehicle is documented with the same criteria, including the external dimensions, the brand, and the model year. To collect the component data, the ADAC and the a2mac1 database are employed. For the derivation of the component positioning (i.e. the topology section of the database), the authors use the vehicle rescue cards.
3.3 Data filtering
In a first step, the authors considered 49 vehicles. Subsequently, the database was filtered to exclude some of the vehicles produced in China. This step is necessary because the data regarding these products mainly come from a single source, and can therefore not be validated. Moreover, the filtered products are not licensed in Europe, which makes data collection even more difficult. Table 1 provides an overview of the vehicles considered.
The resulting database contains 36 vehicles, three of which are hyper-cars (Nio EP9, Rimac Concept One, and Rimac Concept Two).
4 Data clustering
The evaluation of the data shows high variability in terms of the respective positions of machine, gearbox, DC-DC-converter, and AC-DC-inverter. Due to this variability, it is not possible to cluster the relative positioning of these components. For this reason, the authors decide to focus the analysis on the battery. As it represents the largest component in a BEV, the battery has a direct impact on the vehicle dimensions and vice versa [15].
In order to cluster the different battery forms, four basic battery shapes are derived from the considered vehicles. Subsequently, the authors analyze the impact that the battery position and shape have on the passenger compartment.
4.1 Battery shape
The high variety of battery-forms is mostly dependent on the vehicle manufacturer. From the shape analysis, the authors define four basic battery shapes. The definition “basic shape” derives from the fact that all the existing battery forms in the database can be described through the combination of the basic shapes (Fig. 2).

Basic battery shapes and their abbreviations
The most widely used form is the rectangular shape (abbreviation 1, Fig. 2). This option uses the available space between the vehicle sills, allowing the installation of batteries with high capacities. Chevrolet, BMW, Nio and many others adopt this solution for their products.
Tesla, Byton, and Polestar and many others adopt a drop-shape (abbreviation 2, Fig. 2). By cutting off the corners, it is possible to place the battery closer to the front wheels, thus maximizing the space available between the front and the rear axle. Although this solution offers the maximum space usage, it comes with increased safety requirements, as the battery is built close to the axles.
The cross-shape form (abbreviation 3, Fig. 2) is used for the conversion design of the Volkswagen e‑Golf. The battery is placed in the space generated by the elimination of the combustion powertrain components. This form fulfills the requirements imposed by the conversion design while maximizing the usage of available space.
Rimac adopts the T‑shape (abbreviation 4, Fig. 2) for the Concept One and Two. Despite the high installed capacity, this solution still permits the construction of low-height vehicles: the Rimac Concept One has 90 kWh capacity and a vehicle height of 1070 mm [16].
The only battery not described by the basic shapes is that of the Nio EP9. The designer of this hyper-car positioned the battery laterally and integrated it into the sills [17]. This shape was deliberately not considered, as this is the only vehicle where it appears.
The four basic forms are not sufficient to describe all the shapes since in some cases the battery can have a second level or a recess. The derivation of these cases from the basic shapes is straightforward: starting from one of the basic forms, a second level or a recess can be added. The second level or recess, in turn, has the form of one of the basic shapes. Fig. 3 shows how to combine basic shapes with a rectangular second level and a rectangular recess. To simplify the description, the authors use a “+” to denote the presence of a second level and a “−” to denote the presence of a recess. Accordingly, the resulting form for the uppermost design in Fig. 3 is defined as a “1 + 1” while the other is defined as a “2 − 1”.

Basic shapes combination for the Chevrolet Bolt (top view) and for the Polestar 2 (bottom view)
4.2 Battery position
Having analyzed the battery shapes, this section focuses on the battery position. Both position and shape influence the seating height of the passengers. The latter in turn affects the vehicle’s height, which directly influences the car’s aerodynamics and therefore its energy consumption. To describe the battery position, the authors consider its effects on the seating rows. This analysis only considers vehicles with a maximum of two rows of seats, as this is the highest number of rows contained in the database.
To describe the seating position of the driver, the authors use the dimensional references Hip-point (H-point) and Acceleration Heel Point (AHP). For the second row, the authors only use the H‑point, as this row has no driver tasks. A detailed description of these reference points can be found in [18, 19]. From the data analysis, three different position variants are identified: high-floor, low-floor, and mixed-floor (Fig. 4). The vehicle ground limit in Fig. 4 describes the external surface of the vehicle, while the interior compartment limit indicates the boundary where the passenger compartment begins.

Battery position variants and their abbreviations
For the high-floor case (abbreviation “H”, Fig. 4), the battery is placed between the interior compartment and the vehicle ground limit and covers almost the entire length between the rear and the front axle. In this configuration, the battery height impacts directly on the seating position of all passengers, who must be shifted in the z‑direction by an offset equal to the battery height. An example of this battery position variant is the BMW i3.
For the low-floor variant (abbreviation “L”, Fig. 4), interior compartment and vehicle ground limit coincide. This means that the battery height does not affect the seating position nor the vehicle height. The battery can be placed underneath the trunk or in the gearbox tunnel. Despite the favorable aerodynamic condition, the available installation space is smaller than the one in the high-floor case. An example of this battery position variant is the Rimac Concept One.
As the name suggests, the mixed-floor variant (abbreviation “M”, Fig. 4) is a combination of the other two cases. The ground limit is only partly identical to the interior compartment limit. This means that the battery does not influence all the reference points. Examples are the Nissan Leaf and the Chevrolet Spark.
5 Results
As a first result, the authors present a novel topological denomination, which combines the two battery features, shape and position. Subsequently, the authors use the denomination method to cluster the vehicles and conduct further analysis.
5.1 Topological battery denomination
The denomination combines the battery position definition with that for battery shape as shown in Fig. 5.

Denomination method for the battery topology
The first term of the denomination represents the position variant and can take the values “L”, “H” or “M”. The second term describes the basic shape and can assume the values 1, 2, 3 and 4 as already shown in Fig. 2. In the case a recess or a second level is present, the third and the fourth position of the denomination have to be employed. The third and fourth positions of the denomination are to be populated according to the methodology explained in the previous sections. Using this method, the vehicle represented in Fig. 5 is defined as “M1 + 1”. With this definition, it is possible to categorize all the vehicles in the database, as shown in Table 2. Overall, the authors identify 13 different battery topologies. For a complete overview of the results, the table lists the battery denomination as well as the corresponding number of vehicles. The table also distinguishes between purpose design and conversion design.
Table 2 shows that the H1 shape and its derivatives can be used for both purpose design (BMW i3, Renault Twizy, Roewe Marvel X) and conversion design (Roewe ER X5). The form H2, on the other hand, applies only to purpose design (Jaguar I‑Pace, Tesla Model X).
Only three vehicles apply the low-floor variant: the Renault Fluence Z.E. and the Rimac Concept One and Two. The rare employment of this battery topology is probably due to the fact that it is not possible, in this context, to install high battery capacity at a low cost. In fact, the Renault Fluence only has 22 kWh [20]. The Rimac Concept One and Two have a higher capacity, respectively 90 and 120 kWh [21], but are placed in a much higher price bracket.
Most of the vehicles with a mixed-floor have a conversion design strategy. The battery is usually placed underneath the second row of seats.
The authors researched whether the cell type influences the battery topology. The research did not show any correlation. For example, the battery topology H2 is used in the Polestar 2, the Tesla Model X and the NIO ES8. These vehicles have pouch, cylindrical and prismatic cells respectively. Nevertheless, it has to be noted that Tesla, being the only manufacturer with cylindrical cells, can optimally use the space at the corners, as cylindrical cells are not necessarily grouped in prismatic modules, as it is the case for pouch or prismatic cells.
The identified battery topologies are used for the following topology analysis. For this analysis, the authors do not consider hyper-cars.
5.2 Segment-specific topological analysis
This section presents a segment-specific analysis of the results. To group the data, the segment denomination from A000 to C (as explained in [22, p. 12]) is used. Table 3 shows an overview of the segment denomination.
Vehicles between the A000 and A segment are merged into the group Ax. The other two groups are the B segment and the C segment. This analysis focuses on the battery topology, the type and position of the charging plugs, and the number and position of the machines.
Fig. 6 shows that the highest number of conversion design vehicles is contained in the Ax segment. There are no conversion design vehicles for the B segment, and only one for the C group.

Number of conversion and purpose design vehicles for each segment
The Ax group covers 58% of the database. Furthermore, 90% of the vehicles in this segment are equipped with a synchronous machine, in most cases with permanent magnets. Although these machines are rather expensive compared to other technologies, they enable high efficiencies despite their low volume [6, p. 66]. The saving of installation space has a higher priority within these vehicles since, despite the short vehicle length, comparatively large interior space is to be created and at the same time, acceptable driving ranges have to be achieved. All the analyzed vehicles have a combined charging system type 2 (CCS2) fitted. This is due to the fact that the considered vehicles are all produced for the European market, where this technology is the state of the art. However, it should be noted that, for example, the CHAdeMo charging system is more widespread in the Japanese market [6, p. 96]. A typical solution to solve this problem is to offer different vehicle variants with different charging system options. For further analysis, the authors distinguish between conversion and purpose design within the Ax group.
The typical Ax segment topology for the conversion design is shown on the left side of Fig. 7. The illustration shows a fictitious vehicle that has been derived from the collected data. All the vehicles of this group, except for the Smart products, have a front-wheel-drive, equipped with one machine and single-speed gearbox with parallel axis design. The machine is usually placed in front of the front axle. The typical battery topology is the M1. This topology achieves a relatively large passenger area in comparatively small technical installation spaces. This battery shape arises from the fact, that the capacity is installed in the free space generated from the absence of the fuel tank. The installed capacity in this group ranges between 17 and 64 kWh.

Typical topologies for the Ax-segment conversion design (a), the Ax-segment purpose design (b), and the C‑segment (c)
The typical Ax segment topology for the purpose design is shown in the middle of Fig. 7. The typical battery topology for this case is the H1. Examples are the BMW i3 and the Volkswagen ID3. Differing from the conversion design case, the machine is usually placed behind the rear axle and coupled with a single-speed gearbox with parallel axis design. The charging plug is placed close to the electric machine, near the rear axle. The H1 shape allows the installation of higher capacities than the M1 shape. The highest capacity of the segment is 77 kWh (Volkswagen ID3).
All the vehicles of the B segment are purpose design vehicles. The vehicles in this segment show high variability in terms of the position and number of machines, as well as in the shape and position of the battery. Therefore, no clear statement can be made regarding the state-of-the-art topology. The installed capacity in this group ranges between 50 and 95 kWh.
For the vehicles of the C segment, the typical motor topology is an all-wheel drive with one machine per axle. The front machine can be placed behind or in front of the front axle and is usually coupled with a single-speed gearbox with parallel axis design. The rear machine can be placed behind the rear axis with a single-speed gearbox or in coaxial design with a planetary gearbox. Vehicles in this segment are mostly not intended as city cars, which means that the driving range is an important feature. This leads to batteries with significantly higher capacity and weight. The data analysis shows an average battery weight of 621 kg. For comparison, the vehicles of the Ax group have an average weight of 285 kg. In order to fulfill these requirements, the easiest solution is a high-floor battery type. The majority of the vehicles in the C segment exhibit a H1 or H2 battery topology. For the same reason as already given for the Ax group, the typical charging system is the CCS2. With regard to the charging system, an exotic solution has been developed in the NIO ES8. In fact, this vehicle is equipped with a CCS2, but also with a swappable battery system [23].
After analyzing the individual segments and identifying their typical topologies, the authors assess the potential of the different battery shapes. For the potential assessment, the authors consider the battery capacity as a key variable. To compare the database’s vehicles, which belong to different segments, and therefore have different outer dimensions and masses it is necessary to normalize them. For this scope, the authors introduce two variables: the total gravimetric energy density and the total volumetric energy density. The data required for the assessment is collected from the ADAC database and the manufacturer internet pages.
The total gravimetric energy density (Wh/kg) is defined as the ratio between the installed traction battery capacity and the vehicle curb mass. This measure represents how many Wh can be integrated into 1 kg of the vehicle’s total mass.
The total volumetric energy density (Wh/l) is defined as the ratio between the battery capacity and the vehicle’s volume. It represents how many Wh can be integrated into 1 l of the vehicle’s volume. The vehicle’s volume is calculated as the multiplication between wheelbase, width, and height. As the battery is always placed between the axles, it is not necessary to consider the volume of the vehicle’s overhangs, as it cannot be used for the integration of the battery.
Fig. 8 shows the vehicles plotted according to their total gravimetric and volumetric energy density. The authors group the battery topologies in the main groups M1, M3, H1, and H2 and distinguish between conversion design (red-labeled) and purpose design (white-labeled) vehicles. The authors exclude the low-floor variant, as it appears only in the Renault Fluence and the hyper-cars. The vehicles on the upper-right corner of Fig. 8 are the vehicles with the highest integration potential. The figure shows how the M1 shape (most of the vehicle on the lower-left corner) has a low potential and is mostly used for conversion design. All vehicles in the upper right area are purpose design and have a H1 or a H2 battery. Examples are the Volkswagen ID3, the Tesla products, and the Polestar 2. Although these vehicles have different cell types, they have similar total energy densities. From these results, the authors conclude that the cell type alone is not a sufficient variable to assess the vehicle’s potential. It is also clear, that the highest integration potential can be reached only with a purpose design strategy and employing a H1 or a H2 topology.

Total gravimetric and total volumetric energy density of the database’s vehicles; the conversion design vehicles are red-labeled (hyper-cars and Renault Fluence not included)
5.3 Drive concept analysis
In this section, the authors present further results gained from the analysis of the motor topology. The analyzed topologies are summarized in a topology matrix (Fig. 9). For a comprehensive representation, the battery topology has been combined with the drive topology. To simplify, the authors group the batteries of Table 2 into four main groups: H1, H2, M1, and M3. In this overview, the authors exclude the Renault Fluence (as it is the only vehicle with a L1 + 1 shape) and the hyper-cars (both with a L4 shape). The conversion design vehicles are labeled in red while the purpose design vehicles are labeled in black.

Topology matrix of the analyzed vehicles; the conversion design vehicles are red-labeled (hyper-cars and Renault Fluence not included)
As regards the drive topologies, four different groups have been identified. From the matrix, it is clear that, apart from a few exceptions, the typical drive concepts are the front-wheel drive with one machine, the rear-wheel drive with one machine and the all-wheel drive with two machines. A further finding is that there are still no series BEVs equipped with wheel hub motors. Vehicles prototypes with wheel hub motors were already listed in 2012 as part of the analysis of Plötzinger, and Holler [24]. Furthermore, different manufacturers had been investigating this technology even before the analysis of Plötzinger and Holler [25, p. 463]. However, this technology is still limited to vehicle concepts. This is mainly due to the physical limits of the system, as a wheel hub motor represents a high unsprung mass [6, p. 67].
Topologies with four machines have already been considered as possible future solutions for electric vehicles [4]. However, if one excludes the Rimac products, which are hyper-cars and for which a high price is not a limitation, there are no vehicles with four machines. The authors conclude that this drive concept is still too expensive and too difficult to integrate into standard vehicles.
Regarding the gearboxes, almost all the vehicles are equipped with a single-speed gearbox. The exceptions are the Rimac products: each of the two rear machines of the Concept One and Two is equipped with a two-speed gearbox [21]. The Porsche Taycan, which was not considered in this analysis, also has a two-speed gearbox [26]. Two-speed gearboxes can achieve higher efficiency and therefore reduce consumption [27pp. 15–17]. This solution is only used for particularly expensive vehicles, which suggests that the high costs continue to hinder its integration into conventional vehicles.
6 Conclusion and outlook
In this analysis, the authors derive a new topology denomination method from battery shapes of existing BEVs. Subsequently, a topology analysis based on the denomination methods is conducted. Based on the results of the topology analysis the authors can further analyze and assess the integration potential of different battery shapes and positions in current BEVs. It is so far not possible to identify a universal topology, which is suitable for all vehicle segments. Nevertheless, this paper gives an overview of the existing topologies, and identifies the possible trends for the future, regarding the battery and the drive topologies.
Regarding conversion design vehicles, most of the vehicles are equipped with one machine, installed at the front or at the rear axle (the only exception being the Mercedes EQC). The assessment in Fig. 8 shows that conversion design vehicles have a low integration potential if compared with purpose design vehicles. This mostly depends on the installation space available for the traction battery, which cannot be designed beforehand and is constrained by the ICEV topology.
The research shows that considering only purpose design vehicles, the state-of-the-art drive topology is one machine for rear-wheel drive or two machines for all-wheel drive. Regarding the battery shapes combined with these topologies, the topology matrix of Fig. 9 and the potential assessment of Fig. 8 suggest that future vehicles are going to be equipped with a H1 or a H2 shape. It further indicates a higher significance of the battery shape for the energy density than the significance of the cell format.
The authors will use these results in future research, to implement a parametric package model for the traction battery, thus testing different integration methods and evaluating the potentials of the existing cell types.
References
Kraftfahrt-Bundesamt Neuzulassungen von Pkw in den Jahren 2009 bis 2018 nach ausgewählten Kraftstoffarten. https://www.kba.de/DE/Statistik/Fahrzeuge/Neuzulassungen/Umwelt/n_umwelt_z.html?nn=2231372. Accessed 7 Sept 2019
International Council of Clean Transportation (2019) CO2 emission standards for passenger cars and light-commercial vehicles in the European Union. https://theicct.org/sites/default/files/publications/EU-LCV-CO2-2030_ICCTupdate_201901.pdf. Accessed Online
Felgenhauer M, Nicoletti L, Schockenhoff F, Angerer C, Lienkamp M (2019) Empiric weight model for the early phase of vehicle architecture design. In: 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER) Monte-Carlo, Monaco, 05.2019, pp 1–8
Kasper R, Schünemann M (2012) 5. Elektrische Fahrantriebe Topologien und Wirkungsgrad. MTZ Motortech Z 73(10):802–807. https://doi.org/10.1007/s35146-012-0484-1
Kampker A, Vallée D, Schnettler A (2018) Elektromobilität. Springer, Berlin, Heidelberg
Karle A (2018) Elektromobilität: Grundlagen und Praxis, 3rd edn. Carl Hanser, Munich
Korthauer R (ed) (2018) Lithium-Ion Batteries: Basics and Applications. Springer, Berlin, Heidelberg
Nemeth T, Bubert A, Becker JN, de Doncker RW, Sauer DU (2018) A simulation platform for optimization of electric vehicles with modular drivetrain topologies. IEEE Trans Transp Electrific 4(4):888–900. https://doi.org/10.1109/TTE.2018.2869371
Wacker PY (2018) Effizienzsteigerung im Antriebsstrang von Elektrofahrzeugen mittels aktiver Batteriepackverschaltung, 1st edn. Ph.D. Thesis, Institute of Automotive Technology, Technical University of Munich. Dr. Hut, Munich
Pischinger S, Seiffert U (eds) (2016) Vieweg Handbuch Kraftfahrzeugtechnik, 8th edn. Springer Vieweg, Wiesbaden
DIN 62196‑1 (2015) Stecker, Steckdosen, Fahrzeugkupplungen und Fahrzeugstecker – Konduktives Laden von Elektrofahrzeugen. DIN 62196‑1; 2015–06
ADAC ADAC: Allgemeiner Deutscher Automobil-Club. https://www.adac.de/. Accessed 12 Sept 2019
a2mac1 Home – A2Mac1 – Automotive Benchmarking. https://portal.a2mac1.com/?redirect=http%3A%2F%2Fwww.a2mac1.com%2F%3Ffromredirect. Accessed 12 Sept 2019
VDA Rescue and recovery: rescue data sheets for fire services. https://www.vda.de/en/topics/safety-and-standards/rescue/rescue-data-sheets. Accessed 29 Oct 2019
Nicoletti L, Mirti S, Schockenhoff F, König A, Lienkamp M (2020) Derivation of geometrical interdependencies between the passenger compartment and the traction battery using dimensional chains. WEVJ 11(2):39. https://doi.org/10.3390/wevj11020039
Rimac Concept_One | Rimac Automobili: Tech Specs. https://www.rimac-automobili.com/en/hypercars/concept_one/. Accessed 12 Sept 2019
NIO NIO Deutschland – EP9. https://www.nio.com/de_DE/ep9. Accessed 27 July 2020
SAE J4002 (2010) SAE J4002 H‑point machine (HPM-II) specifications and procedure for H‑point determination – auditing vehicle seats
SAE J1100 (2009) SAE J1100 motor vehicle dimensions
ADAC Renault Fluence Z.E. Expression (mit Batteriemiete) ADAC Info – Autodatenbank Detailseite. https://www.adac.de/infotestrat/autodatenbank/autokatalog/detail.aspx?mid=226349&bezeichnung=renault-fluence-z-e-expression-mit-batteriemiete-12–13. Accessed 27 Oct 2019
Rimac Automobili Home | Rimac Automobili: design and innovation in the making of hypercars technology. https://www.rimac-automobili.com/en/. Accessed 27 Oct 2019
Fuchs J (2014) Analyse der Wechselwirkungen und Entwicklungspotentiale in der Auslegung elektrifizierter Fahrzeugkonzepte, 1st edn. Ph.D. Thesis, Institute of Automotive Technology, Technical University of Munich. Cuvillier, München
NIO NIO Deutschland – NIO Power. https://www.nio.com/de_DE/nio-power. Accessed 22 Mar 2020
Pötzinger C, Holler M (2012) Analyse und Bewertung von Architekturen für elektrifizierte Fahrzeugkonzepte. Thesis, Institute of automotive technology. Technical university of Munich, Munich
Heißing B (2011) Fahrwerkhandbuch: Grundlagen, Fahrdynamik, Komponenten, Systeme, Mechatronik, Perspektiven, 3rd edn. Vieweg+Teubner, Wiesbaden
Porsche AG Taycan 4S. https://www.porsche.com/germany/models/taycan/taycan-models/taycan-4s/. Accessed 28 Oct 2019
Bottiglione F, de Pinto S, Mantriota G, Sorniotti A (2014) Energy consumption of a battery electric vehicle with infinitely variable transmission. Energies 7(12):8317–8337. https://doi.org/10.3390/en7128317
Acknowledgements
The authors would like to thank the colleagues of the AUDI AG, who helped during the data evaluation, and the Technical University of Munich, which together with AUDI AG sponsored the project.
Funding
Open Access funding enabled and organized by Projekt DEAL.
Author information
Authors and Affiliations
Contributions
As first author, L. Nicoletti defined the approach for the development of the presented method. F. Ostermann contributed to the data collection and evaluation. M. Heinrich. and A. Stauber provided support with the clustering of the data and the interpretation of the results. X. Lin and M. Lienkamp contributed to concept development, supported in result interpretation, and proofread the paper. M. Lienkamp, as a guarantor, accepts responsibility for the overall integrity of the paper.
Corresponding author
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Nicoletti, L., Ostermann, F., Heinrich, M. et al. Topology analysis of electric vehicles, with a focus on the traction battery. Forsch Ingenieurwes 85, 457–467 (2021). https://doi.org/10.1007/s10010-020-00422-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10010-020-00422-1