
Abstract
The structural damage of ships in navigational accidents is influenced by the hydrodynamic properties of surrounding water. Fluid structure interactions (FSI) in way of grounding contact can be idealized by combining commercial FEA tools and specialized hydrodynamic solvers. Despite the efficacy of these simulations, the source codes idealizing FSI are not openly available, computationally expensive and subject to limitations in terms of physical assumptions. This paper presents a unified FSI model for the assessment of ship crashworthiness following ship hard grounding. The method uses spring elements for the idealization of hydrostatic restoring forces in 3 DoF (heave, pitch, roll) and distributes the added masses in 6 DoF on the nodal points in way of contact. Comparison of results against the method of Kim et al. (2021) for the case of a barge and a Ro–Ro passenger ship demonstrate excellent idealization of ship dynamics. It is concluded that the method could be useful for rapid assessment of ship grounding scenarios and associated regulatory developments.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
According to EMSA [1], ship navigational accidents attributed to collisions and groundings continue to dominate ship casualty statistics and lead to oil spills (Figs. 1, 2). Recent examples are the groundings of the bulk carrier MV Wakashio in Mauritius on 25 July 2020 (see Fig. 2) [2] and the Ro–Ro passenger ship Amorella in Finland on 20 September 2020 [3]. To mitigate risks, develop improved capability for force is investigations and new generation IMO SOLAS regulations it is useful to introduce practical, yet accurate methods for rapid assessment of ship grounding events.

Distribution of maritime casualty events over 2014–2019 [1]

Wakashio grounding accident in Mauritius on 25 July 2020 [2]
To date analytical methods for the estimation of grounding damage have been developed by Simonsen [4, 5], Sun et al. [6] and Zeng et al. [7]. Empirical formulas that may be used to obtain structural responses of ships in groundings have been presented by [8,9,10,11]. Recently, Pineau and Le Sourne [12] and Pineau et al. [13] introduced empirical formulas for the evaluation of ship structural response in hard groundings. In their model, rock mechanics are idealised by a paraboloid rock and grounding dynamics are idealised by the super-element method. The sensitivity of finite element (FE) methods has been studied by Glykas and Das [14], Zhang and Suzuki [15], Haris and Amdahl [16] and Nauyen et al. (2012).
The influence of hydrodynamic effects of the surrounding water has been studied by Le Sourne et al. [17, 18], Yu and Amdahl (2016) and Rudan et al. [19]. These methods demonstrated the importance of added on dynamic response. Recently, Kim et al. [20] confirmed the significance of evasive actions and hydrodynamic restoring forces on ship responses following collisions and groundings using large-scale LS-DYNA/MCOL. In a follow-up study, Conti et al. [21] introduced a comparative method scaling comparative collision damage distributions for use in probabilistic damage stability analysis. Due to the prohibitive cumulated computation time required by simulations considering the finite element method, in this work the collision scenarios were simulated using the super-element method (software programme SHARP).
FSI simulations using commercial algorithms are not open source. For example, the MCOL algorithm used in both SHARP super-element and LS-DYNA FE explicit solvers requires the input of hydrodynamic effects following the analysis of ship motions. This type of analysis is instilled with a broad number of computational modelling uncertainties and pertains to large-scale/uneconomic numerical computations. Also, with the exception of the work recently published by Kim et al. [20] FSI simulations mostly focus on collision dynamics only. This paper presents a simplified and general FSI method for the rapid analysis of ship grounding. Along the lines of earlier work presented by Kim et al. [22] the model utilizes a spring system to idealize mooring systems. Results are compared against the method of Kim et al. [20] for the case of a box-like vessel. Then, the validated method is applied for the case of a passenger ship.
2 Methodology
Global rigid ship dynamics can be idealized Newton’s equation of motion:
where \(\left[ x \right]\), \(\left[ {\dot{x}} \right]\) and \(\left[ {\ddot{x}} \right]\) represent the 6 degree of freedom (DoF) displacement, velocity and acceleration at the earth-fixed centre of gravity (CoG) of the ship, \(\left[ M \right]\) and \(\left[ {M_{a} } \right]\) are the structural mass/inertia and added mass/inertia matrices, \(\left[ G \right]\) is the skew-symmetrical gyroscopic matrix, and \(\left[ {F_{R} } \right]\), \(\left[ {F_{D} } \right]\), \(\left[ {F_{V} } \right]\) and \(\left[ {F_{C} } \right]\) are the hydrostatic restoring, wave damping, viscous and contact forces, respectively.
According to Kim et al. [20], hydrostatic restoring force and added mass are the most influential factors for ship structural response following groundings. The application of frequency-dependent wave damping forces is computationally demanding. This acknowledgement is fundamental with respect to the simplified FSI model presented.
2.1 Simplified idealization of the hydrostatic restoring forces
The hydrostatic restoring forces are defined as
where \(\left[ K \right]\) is the hydrostatic restoring stiffness matrix, \(\left[ x \right]\) is the displacement matrix at CoG, \(\rho\) is the density of water, \(g\) is the gravitational acceleration, \(A_{W}\) is the area of waterplane, \(x_{W}\) and \(y_{W}\) are the location of CoG in each direction from the centre of waterplane, \(J_{Wx}\) and \(J_{Wy}\) are the second moment of inertia of waterplane area, and \(J_{Wxy}\) is the product of inertia, respectively.
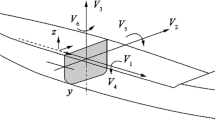
Let us assume that a ship is idealised as a rigid beam. FSI grounding contact dynamics on the ship’s heave axis of motion can be modelled by a spring that translates about the ship’s centre of gravity (CoG). Roll and pitch rotations in way of the centre of rotation (CoR) are idealised by a torsional spring (see Fig. 3). The distance between centers of gravity and rotation influence buoyancy (ship displacement) and in turn roll and pitch restoring forces.

Force and moments by restoring forces in the global system of ship
The equilibrium equation of total forces and moments in way of the ship’s CoG are consequently defined as
where \({F}_{z}\), \({M}_{x}\) and \({M}_{y}\) are the heave, pitch and roll restoring forces in the global system of ship, \({F}_{\mathrm{heave}}\), \({M}_{\mathrm{pitch}}\) and \({M}_{\mathrm{roll}}\) are forces in the heave, pitch and roll directions at CoG, respectively.
Under conditions of symmetry (\({J}_{Wxy}=0\)). Thus, the total restoring force can be defined as:
\([{F}_{{R}_{\mathrm{spring}}}\left(x\right)]\) is the restoring force matrix by spring elements in the FE model.
This concludes that a translational spring of stiffness \({F}_{z}/{d}_{z}=\rho g{A}_{W}\) (unit: force/displacement) for heave, and torsional springs with \({M}_{x}/{\theta }_{x}=\rho g{J}_{Wx}\) and \({M}_{y}/{\theta }_{y}=\rho g{J}_{Wy}\) (unit: moment/angle) for roll and pitch directions can be applied on an FEA idealisation so as to idealise the influence of hydrostatic restoring forces (see Fig. 3).
2.2 Simplified idealization of the added mass
The added mass of a fluid can be expressed in 6-DOF by the matrix as Eq. 5.
where \({m}_{ij}\) is an added mass in the ith-direction caused by an acceleration in jth-direction assuming port/starboard symmetry [23]. This model can be applied to the ship’s CoG during seakeeping analysis [23, 24]. For the model presented in this paper, the hydrodynamic effects from the added mass matrix obtained using Hydrostar [25] are distributed on FEA nodes in way of the CoG of the structure. It is noted that it may be possible to apply the added masses by empirical formulae [26,27,28,29,30].
3 Validation with existing method
MCOL is a subroutine program in LS-DYNA that accounts for hydrodynamic properties in structural response analysis. MCOL is well known and validated solver (see [Le Sourne et al. 2021, 17–19, 31, 37], [38], [39]), the LS-DYNA with MCOL explicit FE code was adopted to validate the simplified FSI model using spring elements. This idealisation accounts for the influence of ship positions at each time step [17, 32] via inclusion of the following parameters in 6 DoF:
-
Mass matrix of target structure (both structural mass and cargo load)
-
Hydrostatic restoring forces and moments
-
Added mass matrix
The comparisons presented in this paper did not account for velocity-dependent viscous damping and ship’s frequency-dependent wave damping forces. This is because such forces do not significantly affect the structural behavior [20] and it is difficult to model them by pure FE analysis without the use of a subroutine program.
3.1 FSI idealization of a barge structure
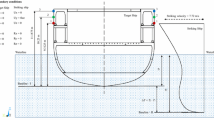
The general particulars, topology, and properties of the barge used to validate the simplified FSI model are given in Tables 1 and 2, and Fig. 4.

Structural layout (left) and midship (right) of the box-shaped ship. (NB: The distance between
Equations 6 and 7 show the mass matrix (mass and mass moment of inertia) and restoring stiffness matrix for a box-shaped ship.
where, \([{M}_{\mathrm{box}}]\) and \([{K}_{\mathrm{box}}]\) are the mass and restoring stiffness matrices for the box-shaped ship, respectively. Units are defined as: ton (for mass), ton·m2 (for mass moment of inertia), N/m (for heave stiffness), N m (for roll and pitch stiffnesses), and N (for the bi-products of stiffnesses).
The FEA model comprised of shell elements based on the Belytschko-Tsay formulation that accounts for the translational and rotational velocity of nodes in 6 DoF [33]. And 150 \(\times\) 150 (mm) size of elements obtained by the mesh convergence study [20] at the impact zone (until 3 m above the bottom) is applied.
Strain-rate (dynamic) effects were idealized according to the Cowper-Symonds equation [34, 35]:
where \({\sigma }_{Yd}\) and \({\sigma }_{Y}\) are the yield strength in static and dynamic loads, \(\dot{\varepsilon }\) is the strain rate, and \(C\) and \(q\) are material related (Cowper–Symonds) coefficients.
Kim et al. [20] defined various grounding accidental scenarios for passenger ships according to [36] criteria. Based on this work the typical forward vessel speed of 11 knots, the rock shapes and grounding location shown in Figs. 5 and 6 were considered representative enough for the simplified case considered.

Definition of rock’s shape and dimensions

Grounding scenarios for developing FE technique
Since the centre of waterplane area in x and y directions coincides with the barge CoG, both translational and torsional springs were located in way of the CoG (see Fig. 4). To apply spring elements in the FE analysis, it is necessary to use additional nodes in way of spring ends. This modelling approach ensures that spring elements will not be affected by the stiffness of any structural element. Additional nodes placed close to the CoG help ensure the influence of heave, roll and pitch motions (see Fig. 7). Table 3 presents the body fixed boundary condition at each additional node, and the corresponding constraint conditions.

Location of additional nodes for applying spring elements
Figures 8, 9, 10 and 11 demonstrate comparison of results between the simplified FSI method and the large-scale LS-DYNA/MCOL model. Comparison of the roll angles is not presented for scenarios 1 and 2 (see Fig. 6) as they are negligible for the case of centreline grounding. In general, it seems that the simplified model with spring elements depicts well the effects of hydrostatic restoring forces and added mass. However, it gives longer surge displacement. This could be attributed to differences in motion predictions when using the deformable spring element of the method developed against the rigid MCOL simulations.

Comparison of ship motions of box-shaped ship in scenario 1

Comparison of ship motions of box-shaped ship in scenario 2

Comparison of ship motions of box-shaped ship in scenario 3

Comparison of ship motions of box-shaped ship in scenario 4
In scenario 3 corresponding to side groundings with Rock I (see Fig. 10), there are bigger differences in roll angle (Fig. 10a, b). These differences do not affect the damage length as the barge stops very soon after the grounding initiation. From an overall perspective, the influence of added mass appears to be minor. Added mass leads to smaller surge displacement possibly because of the additional kinetic energy dissipation effects.
3.2 FSI idealization of a full-scaled ship
The Ro–Ro passenger ship of Fig. 12 and Tables 2 and 4 was used for full scale hard grounding simulations at 11 knots forward speed.

Target ship for the application of developed model
Equations 9 and 10 present, respectively, the mass matrix (including the influence of mass and mass moment of inertia) and restoring stiffness matrix for the passenger ship. The barge presented in Sect. 3.1 has a constant water plane area. Arguably, the water plane area of a real ship depends on draught variations and may vary along the ships’s depth. It is acknowledged that this may lead to variable restoring forces. However, in this study, the changes of water plane area were assumed small and, therefore, constant restoring stiffnesses may be considered acceptable.
where \([{M}_{\mathrm{ship}}]\) and \([{K}_{\mathrm{ship}}]\) are the mass and restoring stiffness matrices for the passenger ship, respectively. Units are same with Eqs. 6 and 7.
In contrast with the barge model, for the case of the real ship CoG and CoR did not coincide in length and depth directions. Accordingly the heave spring was applied at CoG, and pitch and roll springs were located at CoR for considering the restoring forces (see Fig. 13). Additional nodes in way of spring ends were located as described in Fig. 7. The applied structural boundary/constraint conditions are presented in Table 4. An additional mass node was employed to apply the 6 \(\times\) 6 added mass at CoG.

Applied spring elements for restoring forces in the real ship
Figures 14, 15, 16 and 17 demonstrate motions and structural responses. Spring elements and additional mass nodes appear to describe well the hydrostatic restoring forces and added masses. However, for side grounding (B/4 from the centreline) with Rock I (scenario 3) which has broader contact area than Rock II, there is a small difference of ship motions in heave, pitch and roll. In scenario 3, when the new method is implemented, the heave motion and period reach their maximum before MCOL simulations. This could be attributed to the loss of structural members during simplified FSI method as opposed to the LS-DYNA/MCOL model assumes constant mass/moment of inertia (pure rigid body dynamics) throughout the simulation.

Ship motions and structural response of the target ship in scenario 1

Ship motions and structural response of the target ship in scenario 2

Ship motions and structural response of the target ship in scenario 3

Ship motions and structural response of the target ship in scenario 4
Similarly to the box-shaped ship simulations, the method slightly overestimates surge displacement (grounding length) and internal energy. This could relate to the evaluation of ship motions. The simplified method concurrently calculates motions (displacement) and structural mechanics at each time step, while LS-DYNA and MCOL counter-map reaction forces/moments at each time step (see Fig. 18).

Scheme of motion and structural analysis by simplified and existing methods
4 Conclusions
This paper presented a simplified FSI method that accounts for the influence of surrounding water (i.e., restoring force and 6 DoF added mass) during ship grounding dynamics. Heave, pitch and roll hydrodynamic forces are idealised by spring elements and additional mass nodes. The translational spring is used to substitute the heave restoring stiffness, and torsional springs are used to simulate pitch and roll restoring stiffnesses. The additional mass node accounts for added mass effects in 6 DoF. Key conclusions follow:
-
The simplified FSI method describes well hydrodynamic properties. This is justified by the fact that structural crashworthiness obtained by the developed approach is in good agreement with results obtained by the LS-DYNA/MCOL idealization.
-
The new method overestimates marginally the grounding length (surge displacement) and internal energy. This could be attributed to different assumptions in the evaluation of ship motions (e.g., deformable body assumption in the simplified FSI method versus rigid body dynamics in LS-DYNA/MCOL model).
-
The method presented could be useful for rapid assessment of grounding. It can also be extended to idealize ship collision analysis dynamics by applying spring elements on both striking and struck ships. Such capabilities may be useful for ship damage stability assessment using direct [40] and comparative analysis methods [41].
References
EMSA (2020) Annual overview of marine casualties and incidents 2020. European Maritime Safety Agency, Lisbon
MARINELINK (2020) Grounded bulk carrier Wakashoi breaks apart off Mauritius. https://www.marinelink.com/news/grounded-bulk-carrier-wakashio-breaks-480966
FleetMon (2021) VIKING’s ferry Amorella grounded to avoid sinking, passengers evacuation update. https://www.fleetmon.com/maritime-news/2020/30965/vikings-ferry-amorella-grounded-avoid-sinking-pass/. Accessed 8 Dec 2021.
Simonsen BC (1997a) Mechanics of ship grounding, Ph.D. thesis. Technical University of Denmark, Lyngby, Denmark
Simonsen BC (1997b) Ship grounding on rock—I. theory. Mar Struct 10(7):519–562
Sun B, Hu Z, Wang J (2017) Bottom structural response prediction for ship-powered grounding over rock-type seabed obstructions. Mar Struct 54:127–143
Zeng J, Hu Z, Chen G (2016) A steady-state plate tearing model for ship grounding over a cone-shaped rock. Ships Offshore Struct 11(3):245–257. https://doi.org/10.1080/17445302.2014.985429
Hong L, Amdahl J (2008) Plastic mechanism analysis of the resistance of ship longitudinal girders in grounding and collision. Ships Offshore Struct 3(3):159–171. https://doi.org/10.1080/17445300802263849
Paik JK, Seo JK (2007) A method for progressive structural crachworthiness analysis under collision and grounding. Thin Walled Struct 45(1):15–23
Pedersen TP, Zhang S (1998) Absorbed energy in ship collisions and groundings: revising Minorsky’s empirical method. J Ship Res 44(2):140–154
Pedersen TP, Zhang S (2000) Effect of ship structure and size on grounding and collision damage distributions. Ocean Eng 27(11):1161–1179
Pineau JP, Le Sourne H (2021) Rapid assessment of ship bottom sliding on paraboloid shaped rock. In: Proceedings of international conference on marine structures. Trondheim, Norway
Pineau JP, Le Sourne H, Soulhi Z (2021) Rapid assessment of ship raking grounding on elliptic paraboloid shaped rock. Ship Offshore Struct (accepted)
Glykas JA, Das KP (2001) Energy conservation during grounding with rigid slopes. Ocean Eng 28(4):397–415
Zhang A, Suzuki K (2006) Dynamic FE simulations of the effect of selected parameters on grounding test results of bottom structures. Ships Offshore Struct 1(2):117–125. https://doi.org/10.1533/saos.2006.0117
Haris S, Amdahl J (2012) Crushing resistance of a cruciform and its application to ship collision and grounding. Ships Offshore Struct 7(2):185–195. https://doi.org/10.1080/17445302.2010.536392
Le Sourne H, Couty N, Besnier F, Kammerer C, Legavre H (2003) LS-DYNA application in shipbuilding. In: Proceedings of 4th European LS-DYNA conference, Ulm, 23–23 May
Le Sourne H, Donner R, Besnier F, Ferry M (2001) External dynamics of ship-submarine collision. In: Proceedings of international conference on collision and grounding of ships. Copenhagen, Denmark, 1–3 July
Rudan S, Ćatipović I, Berg R, Völkner S, Prebeg P (2019) Numerical study on the consequences of different ship collision modelling techniques. Ships Offshore Struct 14(S1):387–400. https://doi.org/10.1080/17445302.2019.1615703
Kim SJ, Kõrgersaar M, Ahmadi N, Taimuri G, Kujala P, Hirdaris S (2021) The influence of fluid structure interaction modelling on the dynamic response of ships subject to collision and grounding. Mar Struct 75:102875
Conti F, Le Sourne H, Vassalos D, Kujala P, Lindroth D, Kim SJ, Hirdaris S (2021) A comparative method for scaling SOLAS collision damage distributions based on ship crashworthiness—application to probabilistic damage stability analysis of a passenger ship. Ship Offshore Struct (under review)
Kim BW, Sung HG, Kim JH, Hong SY (2013) Comparison of linear spring and nonlinear FEM methods in dynamic coupled analysis of floating structure and mooring system. J Fluids Struct 42:205–227
Sen DT, Vinh TC (2016) Determination of added mass and inertia moment of marine ships moving in 6 degrees of freedom. Int J Transp Eng Technol 2(1):8–14. https://doi.org/10.11648/j.ijtet.20160201.12
Taimuri G, Matusiak J, Mikkola T, Kujala P, Hirdaris S (2020) A 6-DoF maneuvering model for the rapid estimation of hydrodynamic actions in deep and shallow waters. Ocean Eng 218:108103. https://doi.org/10.1016/j.oceaneng.2020.108103
BV (2019) Hydrostar for experts under manual. Bureau Veritas, Paris
Brix JE (1993) Manoeuvring technical manual. Seehafen-Verlag, Hamburg
Clarke D, Gedling P, Hine G (1982) The application of manoeuvring criteria in hull design using linear theory. Trans R Inst Nav Archit 45–68. http://resolver.tudelft.nl/uuid:2a5671ac-a502-43e1-9683-f27c50de3570
Journée JMJ (1992) Quick strip theory calculation in ship design. In: International conference on practical design of ships and mobile units, Newcastle upon Tyne
Minorsky V (1959) An analysis of ship collision with reference to protection of nuclear power ships. J Ship Res 3:208–214
Zhang S (1999) The mechanics of ship collisions, Ph.D. Thesis. Technical University of Denmark, Lyngby
Lee SG, Lee JD (2007) Ship collision analysis technique considering surrounding water. J Soc Nav Archit Korea 44(2):166–173 (in Korean)
Ferry M, Le Sourne H, Besnier F (2002) MCOL user’s manual. Principia Marine, Nantes
LSTC (2019) LS-DYNA keyword user’s manual. Livermore Software Technology Corporation, California
Cowper G, Symonds PS (1957) Strain-hardening and strain-rate effects in the impact loading of cantilever beams, Technical Report 28. Department of Applied Mathematics, Brown University, Rhode Island
Jones N (2012) Structural impact, 2nd edn. Cambridge University Press, Cambridge
SOLAS (2017) Subdivision, watertight and weathertight integrity, SOLAS Chapter II-1, Part B-2. International Convention for the Safety of Life at Sea, International Maritime Organization, London
Kim SJ, Taimuri G, Kujala P, Conti F, Le Sourne H, Pineau JP, Looten T, Bae H, Mujeeb-Ahmed MP, Vassalos D, Kaydihan L, Hirdaris S (2022). Comparison of numerical approaches for structural response analysis of passenger ships in collisions and groundings, Marine Structures, 81:103125, https://doi.org/10.1016/j.marstruc.2021.103125
Nguyen TH, Garré L, Amdahl J, Leira BJ (2012) Benchmark study on the assessment of ship damage conditions during stranding. Ships Offshore Struct 7(2):197–213. https://doi.org/10.1080/17445302.2010.537087?needAccess=true
Yu Z, Abdahl J (2016) Full six degrees of freedom coupled dynamic simulation of ship collision and grounding accidents. Mar Struct 47:1–22
Mingyang Z, Fabien C, Hervé Le S, Dracos V, Pentti K, Daniel L, Spyros H (2021). A method for the direct assessment of ship collision damage and flooding risk in real conditions, Ocean Engineering, 237, 109605. https://doi.org/10.1016/j.oceaneng.2021.109605
Fabien C, Hervé Le S, Dracos V, Pentti K, Daniel L, Sang Jin K & Spyros H (2021) A comparative method for scaling SOLAS collision damage distributions based on ship crashworthiness – application to probabilistic damage stability analysis of a passenger ship, Ships and Offshore Structures. https://doi.org/10.1080/17445302.2021.1932023
Acknowledgements
Dr. Jung Min Sohn would like to acknowledge funding received by the Ministry of Ocean and Fisheries in South Korea for the project "Development of LNG Bunkering Operation Technologies based on Operation System and Risk Assessment (Grant No. PMS4680)". Dr. Sang Jin Kim and Dr. Spyros Hirdaris acknowledge support via EU Horizon_2020 project FLooding Accident REsponse (FLARE-Contract No. 814753). Special thanks of appreciation are conveyed to CSC Finland for the use of their supercomputing facilities.
Funding
Open Access funding provided by Aalto University.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
This article is published under an open access license. Please check the 'Copyright Information' section either on this page or in the PDF for details of this license and what re-use is permitted. If your intended use exceeds what is permitted by the license or if you are unable to locate the licence and re-use information, please contact the Rights and Permissions team.
About this article

Cite this article
Kim, S.J., Sohn, J.M., Kujala, P. et al. A simplified fluid structure interaction model for the assessment of ship hard grounding. J Mar Sci Technol 27, 695–711 (2022). https://doi.org/10.1007/s00773-021-00862-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-021-00862-6