
Abstract
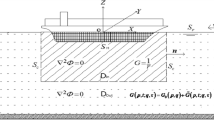
A numerical method for solving 3D unsteady potential flow problem of ship advancing in waves was put forward. The flow field was divided into an inner and an outer domain by introducing an artificial matching surface. The inner domain was surrounded by a ship-wetted surface and a matching surface as well as part of the free surface. The free-surface condition for the inner domain was formulated by perturbation about the double-body (DB) flow assumption. The outer domain was surrounded by a matching surface and the rest had a free surface as well as an infinite far-field radiation boundary. The free-surface condition for the outer domain was formulated by perturbation of the uniform incoming flow. The simple Green function and transient free-surface Green function were used to form the boundary integral equation (BIE) for the inner and outer domains, respectively. The Taylor expansion boundary element method (TEBEM) was adopted to solve the DB flow and inner-domain and outer-domain unsteady flow BIE. Matching conditions for the inner-domain flow and outer-domain flow were enforced by the continuity of velocity potential and normal velocity on the matching surface. Direct pressure integration on the ship-wetted surface was applied to obtain the first- and second-order wave forces. The numerical prediction on the displacement, acceleration and added resistance of the 14000-TEU container ship at different forward speeds were investigated by the proposed TEBEM method. Reynolds-Averaged Navier–Stokes (RANS) equations based on Computational Fluid Dynamics (CFD) method were adopted to compare with TEBEM method. The physical tank experiment results also validated the accuracy of the numerical tank results. Compared with the experimental solutions, TEBEM obtained good agreement with the RANS CFD method. TEBEM, however, was much more efficient and robust.

























Similar content being viewed by others

References
IMO (2009) Interim guidelines on the method of calculation of the energy efficiency design index for new ships. MEPC.1/Circ.681
IMO (2012) Interim guidelines for determining minimum propulsion power to maintain the maneuverability of ships in adverse condition. MEPC.2/Circ.11.
Tsujimoto M, Kuroda M, Shibata K (2008) Development of a practical calculation method for added resistance in short waves. In: The 8th research presentation meeting of national maritime research institute, Tokyo, Japan
Guo BJ, Steen S (2011) Evaluation of added resistance of KVLCC2 in short waves. J Hydrodyn 23(6):709–722
SHOPERA Project (2016) EU funded project “Energy Efficient Safe Operation”
Gerritsma IJ, Beukelman W (1972) Analysis of the resistance increase in waves of a fast cargo ship. Int Shipbuild Progress 19(217):285–293
Fujii H, Takahashi T (1975) Experimental study on the resistance increase of a ship in regular oblique waves. In: Proceedings of 14th international towing tank conference, Ottawa, Canada
Salvesen N (1978) Add resistance of ships in waves. J Hydronaut 12(1):24–34
Faltinsen OM, Minsaas K, Liapis N, Skjordal SO (1980) Prediction of resistance and propulsion of a ship in a seaway. In: Proceeding of the 13th symposium on naval hydrodynamics, Tokyo, Japan
Fang MC (1991) Second-order steady forces on a ship advancing in waves. Int Shipbuild Progress 38(413):73–93
Kashiwagi M (1995) Prediction of surge and its effect on added resistance by means of the enhanced unified theory. Trans West-Jpn Soc Naval Arch 89:77–89
Duan WY, Li CQ (2013) Estimation of added resistance for large blunt ship in waves. J Mar Sci Appl 12(1):1–12
Kim KH, Kim Y (2011) Numerical study on added resistance of ships by using a time-domain Rankine panel method. Ocean Eng 38(13):1357–1367
Shao YL, Faltinsen OM (2012) Linear seakeeping and added resistance analysis by means of body-fixed coordinate system. J Mar Sci Technol 17(4):493–510
Pan ZY, Vada T, Han KJ (2016) Computation of wave added resistance by control surface integration. In: The 35th ASME international conference on ocean, offshore and arctic engineering, Busan, South Korea
Xu G (2010) Time-domain simulation of second-order hydrodynamic force on floating bodies in irregular waves. PhD thesis of Harbin Engineering University, Harbin, China
Shao YL, Faltinsen OM (2010) Use of body-fixed coordinate system in analysis of weakly nonlinear wave-body problems. Appl Ocean Res 32(1):20–33
Duan WY (2012) Taylor Expansion Boundary Element Method for floating body hydrodynamics. In: Proc. of the 27th Intl Workshop on Water Waves and Floating Bodies, Copenhagen, Denmark
Duan WY, Chen JK, Zhao BB (2015) Second-order Taylor expansion boundary element method for the second-order wave diffraction problem. Eng Anal Bound Elements 58(sep.):140–150
Duan WY, Chen JK, Zhao BB (2015) Second order Taylor expansion boundary element method for the second order wave radiation problem. Appl Ocean Res 52:12–26
Duan WY, Dai YS (1999) Time-domain calculation of hydrodynamic forces on ships with large flare. (Part 1: Two-dimensional case). Int Shipbuild Progress 46(446):209–221
van Walree F (2014) A new method for the integration of the transient green function over a panel. In: Proc. of the 29th Intl. Workshop on Water Waves and Floating Bodies, Osaka, Japan
Clément AH (1998) An ordinary differential equation for the Green function of time-domain free-surface hydrodynamics. J Eng Math 33(2):201–217
Bingham HB (2016) A note on the relative efficiency of methods for computing the transient free-surface Green function. Ocean Eng 120(jul.1):15–20
Chen ZM (2017) Ill-posedness of waterline integral of time domain free surface Green function for surface piercing body advancing at dynamic speed. arXiv:1707.00602
Dai YS, Duan WY (2008) Potential flow theory of ship motion in waves. National Defense Industry Press, Beijing (in Chinese)
Maruo H (1960) Wave resistance of a ship in regular head seas. Bull Faculty Eng Yokohama Natl Univ 9:73–91
Acknowledgements
The authors acknowledge financial support from the National Natural Science Foundation of China (Grant nos. 51709064, 51679043, 51779050, 51879058), the Fundamental Research Funds for the Central Universities (Grant no. 3072019CFJ0105), and the Numerical Tank Project sponsored by the Ministry of Industry and Information Technology (MIIT) of P. R. China. The authors want to thank Shanghai Ship and Shipping Research Institute (SSSRI) and Bureau Veritas (BV) for conducting the model tests and providing the experimental data and CFD results for the validation.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
According to the Gauss’ theorem, the hydrostatic pressure integration provides no contribution to the added resistance of ships. The detailed derivation process is shown as following.
We can get the hydrostatic pressure integral term from Eq. (10), as following:
where \(\vec{n}^{(2)} = H^{(2)} \vec{n},\quad \vec{n} = \left( {n_{1}^{\left( 0 \right)} ,n_{2}^{\left( 0 \right)} ,n_{3}^{\left( 0 \right)} } \right)^{{\text{T}}}\), \(H^{(2)} = - \frac{1}{2}\left[ {\begin{array}{*{20}c} {\eta_{5}^{2} + \eta_{6}^{2} } & { - 2\eta_{4} \eta_{5} } & { - 2\eta_{4} \eta_{6} } \\ 0 & {\eta_{4}^{2} + \eta_{6}^{2} } & { - 2\eta_{5} \eta_{6} } \\ 0 & 0 & {\eta_{4}^{2} + \eta_{5}^{2} } \\ \end{array} } \right]\).
For the added resistance, we pay attention to the integration contribution of Eq. (24) in x axis direction:
According to Gauss’ theorem, the following integration results can be obtained easily
Thus, we can get Eq. (26)
\(- \rho \iint\limits_{{S_{H} }} {g\delta_{3} }\vec{n}^{(1)} ds\) is also involved in Eq. (10), where \(\delta_{3}\) means the vertical displacement of ships
Similarly, we also pay attention to the integration contribution in x axis direction
From Gauss’ theorem, these integral contribution can also be got easily
where \(x_{f}\) and \(y_{f}\) mean the x- and y-coordinate of the center of the waterplane. Usually, the ship is symmetrical about the middle line plane, hence \(y_{{\text{f}}} = 0\).
Consequently, we can get the integral contribution of Eq. (27)
Obviously, the integral contribution of hydrostatic pressure in the x axis direction can be omitted, if the comparison is made between Eqs. (26) and (28). Namely, the total integral contribution of Eqs. (26) and (28) for the added resistance of ships is following:
The same analysis process is used to the integral contribution in the y axis direction and z axis direction. So, in the y axis direction
In the z-axis direction
Therefore, from Eqs. (29–31), we can say that the hydrostatic pressure only acts in the vertical direction for a general-shape floating body, which is consistent with Gauss’ theorem.
About this article

Cite this article
Duan, W.Y., Li, J.D., Chen, J.K. et al. Time-domain TEBEM method for wave added resistance of ships with forward speed. J Mar Sci Technol 26, 174–189 (2021). https://doi.org/10.1007/s00773-020-00729-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00773-020-00729-2