
Abstract
The effect of a supports settlement in a symmetric masonry arch is studied by modeling the arch as a system of rigid plastic blocks with frictional sliding. It is shown that in a collapse state due to a horizontal settlement the thrust attains its minimum statically admissible value, so extending to the case of frictional sliding a well-known result of standard limit analysis, which considers collapse states only due to the opening of joints. The case of both vertical and horizontal settlements is also analyzed. It is demonstrated that the collapse thrust in case of horizontal settlement is a lower bound for the collapse thrust in case of generic settlement. Extensive numerical analyses illustrate the above results.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In the past centuries, design of masonry arches and vaults has played a central role in construction practice and still nowadays their structural assessment is fundamental in preservation and restoration of architectural heritage and historical buildings.
Design of masonry arches and vaults was first addressed by means of empirical rules and later by more rational procedures based on graphical statics [1]. Even if these procedures can be framed in the context of limit analysis, the first explicit application of this theory to masonry structures is found in the classical works of Kooharian [2] and Heyman [3], in which limit analysis was adopted under rather realistic assumptions. Various examples and applications of standard limit analysis are collected in [4, 5]. However, standard limit analysis of arches and vaults cannot take into account that both development of hinges and frictional sliding can induce a collapse mechanism. Specifically, frictional sliding between voussoirs cannot be described by an associated plastic flow and when it occurs the collapse load could be not unique.
Masonry arches and vaults have been often modeled as systems of rigid plastic blocks with frictional interfaces to analyze the effect of sliding in collapse mechanism. More generally, upper and lower bounds to the collapse load multiplier for systems of rigid plastic bodies with frictional interfaces have been determined under the assumptions of either infinite or null friction respectively (Drucker [6]). A further more restrictive upper bound for the collapse load multiplier can be obtained by assigning a fictitious associated flow rule to the frictional interfaces and applying the static theorem of the standard limit analysis [7, 8].
Many papers in literature are variously related to frictional sliding. In [9], a general theoretical framework on constitutive laws for masonry-like no-tension materials is presented. A simplified model including the cohesive-frictional crack sliding is analyzed in [10], by means of structured deformation theory, which makes the model fully-associated. In [11], the standard limit analysis is extended for heterogeneous and composite materials with cohesive-frictional constituents, by using a micromechanical approach. A discussion of various methods for calculating plastic deformations under the hypothesis of non-associated flow can be found in [12]. A strategy to deal with the loss of uniqueness of the collapse load multiplier in systems with non-associated plastic flow consists in searching for, among all possible limit states, the minimum value of the collapse load multiplier. This approach leads to non-convex optimization problems, which must be solved by special numerical procedures [13,14,15,16,17]. A nonlinear programming formulation for arches with limited friction was also developed in [18] and the effect of shear sliding on the failure load of segmental arches is studied with a non-smooth contact dynamics approach in [19].
The present work is focused on a symmetric masonry arch with frictional joints subjected to a small settlement of supports. Under the assumption of no sliding of joints (infinite friction), a well-known result of standard limit analysis [20] states that in a settlement mechanism the collapse thrust (more precisely, the component of the reaction force parallel to the settlement displacement) attains its lowest statically admissible value. The evaluation of the minimum thrust and the optimal thickness of hemispherical and spherical masonry domes are provided by a semi-analytical method studied in [21] and [22]. A closed-form expression of the thrust line of a pointed arch under its self-weight and the minimum thickness have been provided in [23]. The impacts of nonlinear constitutive laws and \(P - \delta \) effects on the collapse load are dealt with in [24]. In [25] the crucial role of the refill in the masonry arches has been studied.
Many studies concerning arches and vaults undergoing support settlements have been carried out. The effect of finite displacement settlements has been analyzed with static and kinematic approaches in [26] and [27], respectively. In [28] numerical and experimental investigations using combinatorial calculus has been presented. A variational approach to study the influence of foundation settlements, by extending two classic mathematical approaches (Signorini-Fichera problem), has been adopted in [29]. In [30] frictional masonry structures, modeled with rigid blocks and concave-contacts at interfaces, subjected to foundation settlements are investigated by solving a sequence of linear programming problems. An extensive parametric analysis has been carried out in [31], confirming the reliability of limit analysis in the safety assessment of settled masonry arches. Successively, in [32] the relationship between the direction of the settlement and the slenderness of the arch on the hinges collapse configuration has been studied.
In this paper it is shown that, in a collapse of a symmetric arch with frictional joints subjected to a horizontal settlement, the horizontal thrust attains its minimum statically admissible value, independently from the load history. In addition, when both vertical and horizontal settlement displacements occur at supports, the above determined thrust provides a lower bound to the actual collapse thrust.

Symmetric Masonry Arch
2 Limit analysis of a masonry arch subjected to a spring settlement
In Fig. 1 a symmetric arch made up by \( n_b \) rigid plastic blocks is considered. Blocks can slide over each other at the \( n_j = n_b +1 \) frictional joints. The arch rests under symmetric loads \( \varvec{Q}_k \), that for sake of simplicity are assumed applied at the centroid of each block. In virtue of symmetry, we have that \( Q_{x_k} = -Q_{x_{\hat{k}}} \), \( Q_{y_k} = Q_{y_{\hat{k}}} \) where \( \hat{k} =n_b+1-k \) is the index of the block that is symmetric to the block of index k. As usual in limit analysis of masonry structures, it is assumed that plastic strains are localized at the joints.

Arch subjected to a horizontal settlement mechanism
Let us now assume that the arch is in collapse state due to a horizontal displacement of the skewbacks. By superposing a rigid translation to this mechanism we can consider the collapse state in Fig. 2, in which the structure develops a symmetric mechanism \( \varvec{u}_i \) and the settlement displacements of the end joints are \(\varvec{u}_{1}=-\Delta u\varvec{i}/2 \) and \(\varvec{u}_{n_j}=\Delta u\varvec{i}/2\).
2.1 Statics
In virtue of symmetry the vertical reactions \(Y_\textrm{q}\) are statically determinate and we have
whereas the horizontal thrust H and bending moment X at the end sections are statically undetermined.

Internal forces at joint k
Let us now consider the part of arch in Fig. 3 between the left end joint, whose center is \( \varvec{x}_{1}=-L/2\varvec{i}\), and the joint of index k, whose center is \(\varvec{x}_k=x_{k}\varvec{i}+ y_{k}\varvec{j}\). Let us denote by \( \varvec{n}_k \) and \( \varvec{t}_k\) the normal unit vector and the tangent unit vector of the joint interface k and by \(\varvec{k}=\varvec{i}\times \varvec{j}\) the unit vector orthogonal to the arch plane. Without loss of generality we will assume that
By imposing the equilibrium of this part of arch we find the internal forces at the joint k:
where \( Y_\textrm{q}\) is given by (1), \( N_{k} \) is the compressive axial force, \( V_{k} \) is the shear force and \( M_{k} \) is the bending moment. All joint internal forces are collected in the vector \(\varvec{s}\in \mathbb {R}^{3 n_j}\)
and (3) are summarized as

Feasible domain of a generic section k
2.2 Feasibility conditions and flow laws
At each joint k the feasibility conditions \(\left| V_k \right| \le f N_k \) and \(\phi _k(N_k,M_k) \le 0\) hold (Fig. 4), where \( f \) is the friction coefficient and the functions \(\phi _k\) define the convex plasticity domains of the joints in the planes \( (N_{k},M_{k}) \). These are summarized as follows
The friction sliding multipliers are collected in the vectors \(\varvec{\gamma }_{+}\) and \(\varvec{\gamma }_{-} \) and obey to the non-associated flow law
Then the sliding displacement vector is obtained as \(\varvec{\gamma }=\varvec{\gamma }_{+}- \varvec{\gamma }_{-} \in \mathbb {R}^{n_j}\), The relative axial displacement \( \zeta _{k} \) and the relative rotation \( \omega _{k} \) are collected in the vector \(\varvec{\xi }=\left\{ \zeta _{1} \ldots \zeta _{n_j} \quad \omega _{1} \ldots \omega _{n_j}\right\} \in \mathbb {R}^{2 n_j}\) and obey to the associated flow law
where the symbol \(\dfrac{\partial \varvec{\phi }}{\partial \varvec{\sigma }}\) is the gradient of the plastic function vector \(\varvec{\Phi }\) with respect to the vector \(\varvec{\varvec{\sigma }}= \left\{ \varvec{N},\, \varvec{M}\right\} \) collecting the internal forces due to the stresses normal to joint interfaces and the vector \(\varvec{\lambda }_p\) groups the plastic multipliers (Fig. 5).

Plastic joint displacements
2.3 Kinematics
Once the block relative displacements are known, the displacement of the centroid \( \varvec{x}^G_k\) of generic block k can be determined as
Since the relative displacements between the end sections centers is \(\Delta u\varvec{i}\) and the relative rotation between the end sections is null, we must have
2.4 Thrust in a collapse due to a horizontal settlement
Now we are able to state the following
Theorem 1
In the collapse of a symmetric arch with frictional joints due to a horizontal settlement, the horizontal thrust attains its minimum statically admissible value.
Proof
Let \(\mathcal {\tilde{S}}\) be the set of all symmetric statically admissible (feasible) internal forces
Further, let \(\mathcal {\tilde{K}}\) be the set of the symmetric kinematically admissible mechanisms, satisfying (9) and (10)
Now, let \( \tilde{H}_c\) and \( \varvec{s}_{c} \) be the thrust and the internal forces vector occurring in the settled collapse state, where the subscript c refers to any static or kinematic quantity in this state. Since \( \varvec{s}_{c} \in \mathcal {\tilde{S}}\) and \( \varvec{u}_c\in \mathcal {\tilde{K}}\), in view of Virtual Work Theorem (VWT) we find
where \( \varvec{\gamma }_{c} \) and \( \varvec{\xi }_{c} \) satisfy the flow laws (7) and (8). Let us now consider a generic symmetric feasible state \( \varvec{s}\in \mathcal {\tilde{S}}\). Again VWT gives
and, by subtracting (14) to (13) we get
Since the plasticity domains \( \phi _k \) are convex and the flow rule (8) is associated, the internal virtual work in (15) due to the axial forces and bending moments is non-negative
Notice that, in general, a similar relation cannot be established for the internal virtual work of the shear forces, due to the lack of an associated flow. However, in this particular problem it is possible to establish a relation between the horizontal thrust and the work of the shear forces. To this end, at first we notice that, in view of (7), in a collapse state we have
Further, for any feasible state
so that, in view of (17), (18) and (3) we get
where \(\mathbf {cos \,\varvec{\alpha }} \) is the vector of components \( \cos \alpha _k \ge 0 \). In view of (19), (15) becomes
Since \( \mathbf {cos \,\varvec{\alpha }} \cdot | \varvec{\gamma }_\textrm{c} | \ge 0 \) and \( \Delta u > 0 \) we find
which proves that
2.5 Thrust in a collapse due to a generic settlement
The above result no longer holds for a generic settlement. However, it can be shown that the collapse thrust \( \tilde{H}_c\) given by (22), referred to a symmetric settlement, always provides a lower bound to the actual collapse thrust.

Arch subjected to a generic settlement mechanism
To this end without loss of generality let us consider the symmetric arch subjected to a generic settlement in Fig. 6, where both a horizontal settlement \( \Delta u \) and a vertical settlement \( \Delta v \) occur. Now the internal forces vector \( \varvec{s} \) depends on the three statics unknowns \( \left( H, X, \Delta X \right) \) (see Fig. 6).
where the components of \( \varvec{s}_{\Delta X} \) are
It is possible to state the following
Theorem 2
In the collapse of a symmetric arch with frictional joints due to a generic settlement, the collapse thrust due to the only horizontal component provides a lower bound to the actual thrust.
Proof
Let \( \mathcal {S} \) be the set of statically admissible internal forces in this more general case
and let \(\varvec{s}_c \in \mathcal {S} \) be a collapse internal force vector associated to the thrust \( H_c \). Let us now consider the vector \( \hat{\varvec{s}}_c \) obtained by a reflection about the central vertical axis of \( \varvec{s}_c \). Then the components of the two vectors are related as follows:
Here we recall that \( \hat{k}\) is the index of the joint symmetric to the joint of index k. Since the feasible domains of the pairs of symmetrical joints are identical, also \( \hat{\varvec{s}}_c \in \mathcal {S}\). Moreover, both \( \varvec{s}_c \) and \( \hat{\varvec{s}}_c \) are associated to the same horizontal thrust \( H_c \), as any their convex linear combination
Notice that \(\alpha \varvec{s}_c + (1-\alpha )\hat{\varvec{s}}_c\in \mathcal {S}\), due to the convexity of this set. In particular, for \(\alpha = 1/2\), the vector of symmetric internal forces \(\tilde{\varvec{s}}= \frac{1}{2} \left( \varvec{s}_c + \hat{\varvec{s}}_c \right) \in \mathcal {\tilde{S}}\) is still in equilibrium with the thrust \( H_c \). Now by Theorem 1 we have that the thrust \(\tilde{H}_c\) for the symmetric settlement represents a minimum value for statically admissible states, so that
3 Numerical analysis of arches subjected to generic settlements
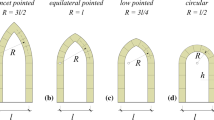
The following numerical applications will be performed in the particular case of circular arches formed by blocks that, for sake of simplicity, are assumed rigid (Fig. 7). However, the following analysis can be easily extended to the case of rigid plastic blocks. The friction coefficient is \( f=0.35 \) and the arches are subject both to their self weights, with voussoirs of specific weight \( \rho _0=1 \) and to the weight of the refill, with specific weight \( \rho _1=0.5 \rho _0\). In the following numerical examples, we consider the refilling height \(h_r = 0.2\) (see Fig. 7).

Circular arch
The feasibility conditions \( \varvec{\phi }(\varvec{N}, \varvec{M}) \le \varvec{0}\) here reduces to the inequality \( |\varvec{M}| \le \varvec{d}\varvec{N} \), where the diagonal matrix \( \varvec{d}\) collects the half joints lengths \( d_i=\frac{h_i}{2} \) and, more generally, the components \( d_{i} \) could be the maximum allowed eccentricities of the axial forces at the blocks interfaces. Therefore the condition (25) can be written as
where \( \varvec{I}\) is the identity matrix and the internal forces are given by (4) and (23). The equations (29) are then summarized as
and the flow rule (8) reduces to
where \( \omega _{+_k} \) and \( \omega _{-_k} \) are the relative rotations around the extrados bound and the intrados bound of the k-th contact, respectively (see Fig. 8), which are non-negative due to the rigidity of blocks. If both of them are positive, then the k-th contact is open.

Geometric interpretation of \(\omega _{+_k}\) and \(\omega _{-_k}\)
The kinematic condition \( \varvec{u}\in \mathcal {K}\) are imposed by means of the VWT. Then, in view of (31) we have
where we recall that \(\varvec{N}\) are compressive axial internal forces. So we get the kinematic conditions
and the further condition
which are summarized respectively as
where \( \varvec{\chi } ^T=\left\{ \varvec{\gamma }_+ ^T, \varvec{\gamma }_- ^T, \varvec{\omega }_+ ^T, \varvec{\omega }_- ^T\right\} \). Then the set \( \mathcal {C} \) of the collapse states \( \varvec{\varvec{\eta }}=(\varvec{s}, \varvec{\chi })\) of an arch subject to a generic settlement can be expressed as
Generally, the complementary condition \( \varvec{\chi }^{T}\varvec{\mathcal {M}}\varvec{s}\ge 0 \) in (37) presents high nonlinearity and requires special numerical procedures. Here, we prefer to follow te approach in [15], so we replace it by the smoother condition
where \(L_e\) is the work of the external forces, which must be equal to the work of the frictional forces. Therefore (37) becomes
As already stated, in presence of frictional sliding the collapse state of a system of rigid plastic blocks depends on the load history and the collapse value of the horizontal thrust is not unique. For this reason in the following analysis both the maximum and minimum collapse horizontal thrust will be determined as
Both these two limit values are independent from the load history and therefore represent a useful information in the structural assessment of masonry arches.

Detailing of case d) of example 1, in which both opening of hinges and frictional sliding of blocks occur \(\left( H_{c_\mathrm{{min}}}=H_{c_\mathrm{{max}}} = 0.1955 \right) \)
In the following, three numerical examples regarding circular arches are developed. For each example, four cases (a)–(d) have been considered, in which, for a fixed value of \(\Delta u\), \(\Delta v\) varies from 0 (case a) to \(3 \Delta u\) (case d). Since multiple local optima may exist, a global minimum search procedure is used to solve the problems (40), in order to evaluate \( H_{c_\mathrm{{min}} } \) and \( H_{c_\mathrm{{max}} } \) and to illustrate the effectiveness of the theorems.
In particular, the MATLAB® procedure GlobalSearch has been applied. The fmincon and interior-point options have been adopted and 500 different initial points have been considered. The global minimum has been determined by computing several local minima. This deterministic strategy has been preferred to heuristic strategies, such as genetic algorithms, since in our problem all constraints are differentiable and the exploitation of the gradient and the hessian of the nonlinear constraint has resulted crucial for the accuracy of the obtained results.
In all tested cases the maximum value and the minimum value of the collapse thrust have been resulted coincident. This circumstance could be associated to the low degree of static indeterminacy of arches, but we are not able to establish if it represents a general result, that could be object of further theoretical investigations. Further, interestingly, in all arches here examined the collapse thrust in the case a) of horizontal settlement and in case b) of equal horizontal and vertical settlements have been coincident and similar collapse mechanisms have always occurred, i.e., involving frictional sliding at the same joints.
The numerical example 1 regards a circular arch formed by 12 voussoirs, whose external radius and internal radius are \( r_\mathrm{{max}}=1.1 \) and \( r_\mathrm{{min}}=0.9\), with \( \alpha =\pi /3 \). In Table 1 the results of the performed analysis are summarized. In the collapse mechanism for the case d), also depicted in Fig. 9, both opening of hinges and frictional sliding of blocks occur. The apparent detachment between the two voussoirs where sliding occurs is due to the kinematic assumption of infinitesimal rotations, while finite rotations and displacements are shown in the figure.
The numerical example 2 regards a circular arch formed by 18 voussoirs, whose external radius and internal radius are \( r_\mathrm{{max}}=1.2 \) and \( r_\mathrm{{min}}=0.8\), with \( \alpha =7\pi /9 \). In the Table 1 the results of the performed analysis are summarized. As in the previous case the collapse thrusts in the case a) and in case b) coincide.
The numerical example 3 regards a circular arch formed by 12 voussoirs, whose external radius and internal radius are \( r_\mathrm{{max}}=1.2 \) and \( r_\mathrm{{min}}=0.8\), with \( \alpha =\pi /2 \). In the Table 1 the results of the performed analysis are summarized. In the collapse mechanism in case d) only sliding of blocks occur.
4 Conclusions
In this work the collapse due to spreading of supports of a symmetric masonry arch is examined. The arch is modeled as a system of rigid plastic blocks with frictional joints. We show that in a collapse state due to a horizontal settlement, the thrust attains its minimum statically admissible value. Further, the collapse thrust in case of horizontal settlement provides a lower bound for the collapse thrust in case of a generic settlement. These results are the thesis of two theorems here proven.
Numerical analyses relative to circular arches have been also performed. Two interesting circumstances have been emerged. First, for a given settlement, a unique value of the collapse thrust has been always determined. However, the generality of this result is not proven at the present stage. Next, small components of vertical settlement do not modify the kinematics of collapse mechanism and, as a consequence, the collapse thrust.
We deem that our results can be a useful tool for assessing the safety of masonry arches subjected to settlements.
References
Como, M.: Statics of historic masonry constructions. Springer (2013)
Kooharian, A.: Limit analysis of voussoir (segmental) and concrete arches. J. Am. Concr. Inst. 49(12), 317–328 (1952)
Heyman, J.: The stone skeleton. Int. J. Solids Struct. 2(2), 249–256 (1966)
Lucchesi, M., Padovani, C., Pasquinelli, G., Zani, N.: Masonry constructions: mechanical models and numerical applications. Springer (2008)
Lucchesi, C.P.G., Padovani, M., Zani, N.: On the collapse of masonry arches. Meccanica 32(4), 327–346 (1997)
Drucker, D.: Coulomb friction, plasticity, and limit loads. Journ. Appl. Mec. Trans. ASME 21(1), 71–74 (1954)
Livesley, R.K.: Limit analysis of structures formed from rigid blocks. Int. J. Numer. Methods Eng. 12(12), 1853–1871 (1978)
Angelillo, M., et al.: Mechanics of masonry structures. Springer (2014)
Angelillo, M.: Constitutive relations for no-tension materials. Meccanica 28, 195–202 (1993)
François, M., Royer-Carfagni, G.: Structured deformation of damaged continua with cohesive-frictional sliding rough fractures. Eur. J. Mech. -A/Solids 24(4), 644–660 (2005)
Li, H.: Microscopic limit analysis of cohesive-frictional composites with non-associated plastic flow. Eur. J. Mech. -A/Solids 37, 281–293 (2013)
Hu, Q., Li, X., Chen, J.: On the calculation of plastic strain by simple method under non-associated flow rule. Eur. J. Mech. -A/Solids 67, 45–57 (2018)
Ferris, M.C., Tin-Loi, F.: Limit analysis of frictional block assemblies as a mathematical program with complementarity constraints. Int. J. Mech. Sci. 43(1), 209–224 (2001)
Gilbert, C., Casapulla, M., Ahmed, H.M.: Limit analysis of masonry block structures with non-associative frictional joints using linear programming. Comput. Struct. 84(13–14), 873–887 (2006)
Trentadue, F., Quaranta, G.: Limit analysis of frictional block assemblies by means of fictitious associative-type contact interface laws. Int. J. Mech. Sci. 70, 140–145 (2013)
Orduña, A., Lourenço, P.B.: Three-dimensional limit analysis of rigid blocks assemblages. Part I: Torsion failure on friction interfaces and limit analysis formulation. Int. J. Solids Struct. 42(18–19), 5161–5180 (2005)
Nodargi, C., Intrigila, N.A., Bisegna, P.: A variational-based fixed-point algorithm for the limit analysis of dry-masonry block structures with non-associative coulomb friction. Int. J. Mech. Sci. 161, 105078 (2019)
Cocchetti, G., Rizzi, E.: Nonlinear programming numerical formulation to acquire limit self-standing conditions of circular masonry arches accounting for limited friction. Int. J. Mason. Res. Innov. 5(4), 569–617 (2020)
Beatini, V., Royer-Carfagni, G., Tasora, A.: Modeling the shear failure of segmental arches. Int. J. Solids Struct. 158, 21–39 (2019)
Como, M.: Minimum and maximum thrust states in statics of ancient masonry building. In: Sinopoli (ed.) Proceedings of the 2nd International Arch Bridge Conference, pp 6–9. Balkema, Rotterdam (1998)
Coccia, S., Como, M., Di Carlo, F.: Minimum thrust and minimum thickness of hemispherical masonry domes. Acta Mechanica 227, 2415–2425 (2016)
Nodargi, N., Bisegna, P.: Minimum thrust and minimum thickness of spherical masonry domes: a semi-analytical approach. Eur. J. Mech.-A/Solids 87, 104222 (2021)
Nikolić, D.: Thrust line analysis and the minimum thickness of pointed masonry arches. Acta Mechanica 228(6), 2219–2236 (2017)
Pintucchi, B., Zani, N.: Effects of material and geometric non-linearities on the collapse load of masonry arches. Eur. J. Mech.-A/Solids 28(1), 45–61 (2009)
Baratta, A., Corbi, O.: Contribution of the fill to the static behaviour of arched masonry structures: theoretical formulation. Acta Mechanica 225(1), 53–66 (2014)
Ochsendorf, J.: The masonry arch on spreading supports. Struct. Eng. 84(2), 29–36 (2006)
Coccia, F., Di Carlo, S., Rinaldi, Z.: Collapse displacements for a mechanism of spreading-induced supports in a masonry arch. Int. J. Adv. Struct. Eng. 7(3), 307–320 (2015)
Galassi, G.R.L., Misseri, S., Tempesta, G.: Failure modes prediction of masonry voussoir arches on moving supports. Eng. Struct. 173, 706–717 (2018)
Tralli, A., Chiozzi, A., Grillanda, N., Milani, G.: Masonry structures in the presence of foundation settlements and unilateral contact problems. Int. J. Solids Struct. 191–192, 187–201 (2020)
Portioli, F., Cascini, L.: Assessment of masonry structures subjected to foundation settlements using rigid block limit analysis. Eng. Struct. 113, 347–361 (2016)
Zampieri, P., Faleschini, F., Zanini, M.A., Simoncello, N.: Collapse mechanisms of masonry arches with settled springing. Eng. Struct. 156, 363–374 (2018)
Zampieri, P., Amoroso, M., Pellegrino, C.: The masonry buttressed arch on spreading support. Structures 20, 226–236 (2019)
Acknowledgements
F. Trentadue and D. De Tommasi are supported by the PRIN Project 2017 J4EAYB_001. G. Vitucci is supported by the POR Puglia FESR-FSE project REFIN A1004.22.
Funding
Open access funding provided by Politecnico di Bari within the CRUI-CARE Agreement.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Trentadue, F., De Tommasi, D., Marasciuolo, N. et al. Thrust in a symmetric masonry arch with frictional joints on spreading supports. Acta Mech 235, 659–670 (2024). https://doi.org/10.1007/s00707-023-03759-0
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-023-03759-0