
Abstract
We investigate the existence of solutions to a recent model for large-scale equatorial waves, derived recently by an asymptotic method driven by the thin-shell approximation of the Earth’s atmosphere in rotating spherical coordinates.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Due to the Earth’s rotation, geophysical waves in equatorial regions propagate typically in the azimuthal direction, since the change of sign of the Coriolis force across the Equator produces an effective waveguide, forcing a practically azimuthal flow propagation (see the discussions in [1, 2]). While in the geophysical research literature there is a preference for flat-space geometry by means of the f-plane approximation (see [9, 14]), and this approach still provides a lot of insight into the equatorial ocean dynamics (see [2, 12] and references therein) due to the large-scale nature of atmospheric flows, in studying them it is better to take into account curvature effect by working in rotating spherical coordinates (see the discussions in [4, 6, 15, 17]). While recent studies of oceanic flows in rotating spherical coordinates are available [3, 7, 8, 11, 13], note that the methods used in these papers do not apply to atmospheric flows. The main differences are due to the fact that the temperature forcing is a key factor for atmospheric flows (and plays a more modest role in the ocean) and in the ease at which density and pressure vary in the compressible atmosphere – see the discussions in [4, 6]. Another fundamental difference in the two geophysical flow structures – oceanic and atmospheric – comes about because for the atmosphere, the flow necessarily involves a perturbation away from a background state, whereas the ocean does not (see the discussion in [10]). Fortunately, however, the perturbation is not based on some suitable amplitude parameter (as might be expected), rather it is simply the thin-shell parameter, and so this is valid for atmospheric motions of any finite size, bringing together all the leading-order dynamics and thermodynamics, at the same order and without any additional approximations (see [5]).
In this paper we investigate a model for the propagation of atmospheric waves derived recently [3], considering the issue of the existence of solutions in equatorial regions, where, as pointed out above, we can take advantage of the fact that the direction of propagation is azimuthal to simplify the dynamics. We use a Fourier mode decomposition to gain insight into the dynamics.
2 Preliminaries
Adhering to the point of view of [4] we regard the atmosphere to be a compressible, viscous fluid. Therefore, we use the Navier-Stokes and mass conservation equations of fluid dynamics, allowing for variable density, coupled to an equation of state and a suitable version of the first law of thermodynamics. When formulating the governing equations we take into account that the shape of the Earth is (essentially) that of an oblate spheroid. In atmospheric science, it is customary to approximate the oblate spheroid by an ellipsoid obtained by rotating an ellipse, whose center coincides with the center of the Earth, about its semi-minor polar axis (of length \(d'_P\approx 6357\hbox { km}\)), with a semi-major equatorial axis of length \(d'_E\approx 6378\hbox { km}\). (We use the prime notation to refer to physical, dimensional, variables. After suitable non-dimensionalization, the prime notation will be removed.)
The longitude \(\varphi \) and the geodetic latitude \(\beta \) are used to define Cartesian coordinates
where
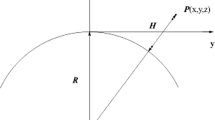
denotes the eccentricity. We associate to the ellipsoid (rotating with constant angular speed \(\Omega '\approx 7.29\times 10^{-5}\) rad \(\hbox {s}^{-1}\)) the coordinate system \((\varphi ,\beta , z')\), where \(z'\) is the vertical distance up from the surface of the ellipsoid. The unit tangent vectors at the surface of the ellipsoid are \(({\mathbf {e}}_{\varphi },{\mathbf {e}}_{\beta },{\mathbf {e}}_z)\): \({\mathbf {e}}_{\varphi }\) points from West to East along the geodetic parallel, \({\mathbf {e}}_{\beta }\) from South to North along the geodetic meridian and \({\mathbf {e}}_z\) points upwards, cf. Fig. 1.

Representation of a point P in the atmosphere (away from the polar axis) using the hybrid spherical-geopotential rotating coordinate system \((\varphi ,\theta ,z')\) which is derived from the spherical system \(({\mathbf {e}}_{\varphi },{\mathbf {e}}_{\theta }, {\mathbf {e}}_r)\) and the geopotential system \(({\mathbf {e}}_{\varphi },{\mathbf {e}}_{\beta }, {\mathbf {e}}_z)\). We have denoted with \(\varphi \) and \(\theta \) the longitude and the geocentric latitude of P, respectively, and with \(\beta \) the geodetic latitude of the projection \(P^{*}\) of P on the ellipsoidal geoid. The unit vector \({\mathbf {e}}_z\) points vertically upwards along the normal \(PP^{*}\) to the geoid (which intersects the equatorial plane in the point \(P_e\)), while \(({\mathbf {e}}_{\theta },{\mathbf {e}}_r)\) are obtained by rotating the unit vectors \(({\mathbf {e}}_{\beta },{\mathbf {e}}_z)\) by the angle \(\beta -\theta \), in the plane of fixed longitude \(\varphi \)
This system is valid everywhere, except along the direction of the polar axis. More details about the geometry of this system are given in [4] where it is advocated for the passage from spherical coordinates \((\varphi , \theta ,r')\) to the hybrid spherical-geopotential coordinates \((\varphi , \theta , z')\) coupled with a transformation of the velocity vector and the gravity term. The advantage of the spherical-geopotential hybrid rotating coordinate system over the spherical potential approximation ([16]) is that, in the former, the formulation retains the details of the curved-space geometry of the Earth, and the leading-order (geometrical) correction terms apply to the background state of the atmosphere but do not interact (in the leading-order perturbation) with the dynamics of the atmosphere.
To render the equations of motion in a form that is relevant for a discussion of atmospheric flows we will perform a non-dimensionalization. For this purpose, we will use an appropriate scale length (taken to be the maximum height of the troposphere \(H'\approx 16\hbox { km}\) at the Equator) and an associated speed scale \(\Omega ' H' (\approx 1.2\hbox { m }\hbox {s}^{-1}\)). Here and in what follows we use the “ \('\) ” notation for physical quantities. The non-dimensional quantities appear without the prime notation. For instance \((u',v',w')\) denotes the velocity field in spherical coordinates while (u, v, w) is a non-dimensional velocity with w normal and (u, v) tangential to the ellipsoidal geoid. The pressure, \(p^{\prime }\), and the temperature, \(T^{\prime }\), will also be non-dimensionalized, the resulting non-dimensional quantities being denoted with p and T, respectively. Moreover, \({\bar{\rho }}'\approx 0.8\hbox { kg }\hbox {m}^{-3}\) denotes the density and \({\bar{\mu }}'\approx 2\times 10^{-2}\hbox { m}^{-1}\hbox { s}^{-1}\) denotes the dynamic eddy viscosity, which is assumed to vary only in the radial direction as in [4]. More precisely, we define
where \({\mathfrak {R}}'\approx 287\) \(\hbox {m}^2\) \(\hbox {s}^{-2}\) \(K^{-1}\) is the universal gas constant and the constant k measures the size of the velocity component normal to the ellipsoid.
The transformation from \(r'\) to \(z'\) shows (cf. [4]) that the viscous terms appearing in the Navier-Stokes equation satisfy
With the previous considerations in mind we invoke in the following (cf. [6]) a suitable approximation of the Navier-Stokes equations by considering small \(\varepsilon \) and small \(\delta ={\mathfrak {e}}^2\), where the latter parameter is indicative of the effects of small deviations of the ellipsoid from the sphere. More precisely, denoting
the governing equations we will work with are
and
where the last equation is the first law of thermodynamics with Q being the non-dimensional hear sources (or sinks), expressing the change of total energy due to any heat exchanges. We have introduced above the non-dimensional constants (held fixed throughout the non-dimensionalization)
To search for solutions of the (rather) complicated system (2.2a)–(2.2f) we perform an asymptotic expansion
where \({\mathfrak {U}},{\mathfrak {U}}_n\) and \( \tilde{{\mathfrak {U}}}_n\) stand for each of the variables \(u,v,w,p,\rho , T\). Under the assumption that the boundary and initial conditions and the heat source term are consistent with the previous asymptotic expansion we obtain that at the leading-order, \(O(\varepsilon ^0)\), the problem is time-independent. More precisely, setting
we obtain that the leading order approximation is given as the problem
with solution
The important time-dependence appears at order \(O(\varepsilon )\) for which the equations assume the form
where
with \(Q_0\equiv 0\) for the troposphere.
A further transformation of the above system is necessary so that the finding of exact solutions becomes possible. To this end we set
which implies \({\mathcal {Q}}_0=\frac{\partial {\mathcal {q}}_0}{\partial t}\). Hence, integrating now Eq. (2.6f) we obtain
where \(A_1(\varphi ,\theta ,z)\) is an arbitrary function which is determined by the initial data on the perturbation temperature and pressure. Moreover, setting
we obtain from (2.6c) the relation
where \(B_1(\varphi ,\theta ,t)\) is an arbitrary function determined by the perturbation pressure on the ground. The thermodynamic properties of the atmosphere are completed by the relations
obtained from (2.6e) and (2.6f). Putting now
the system (2.6) can be written as
Motivated by the shape of solutions (2.5) we perform the change of variables \(\zeta =gz-\frac{1}{2}\cos ^2\theta \) which transforms from the variables \((\varphi ,\theta ,z,t)\) to \((\varphi ,\theta ,\zeta ,t)\) and so the previous system becomes
where \(m(z):=M(\zeta +\frac{1}{2}\cos ^2\theta )\).
Owing now to the large Reynolds numbers (cf. the discussion in [5]) we pass to study the inviscid limit of the system in (2.11). In doing so we denote
and so obtain the model of the propagation of waves in the troposphere
The latter model was derived recently [5] in the inviscid limit of the governing equations for atmospheric flows in non-polar regions. In (2.12a)–(2.12c) the vector (U, V, W) is the non-dimensional velocity (with U zonal velocity, V meridional velocity and W vertical velocity, t being time, \(\theta \in (-\frac{\pi }{2},\frac{\pi }{2})\) the angle of latitude and \(\varphi \in [0,2\pi )\) the angle of longitude) scaled by the background density, so that the explicit dependence on the background state of the the atmosphere is already accounted for (see the discussion in [5]). The system (2.12a)–(2.12c) provides a complete description of the (inviscid) velocity field at leading order, for a given forcing F, which represents the perturbation to the thermodynamic state, encompassing the identification of heat sources. Concerning the neglection of viscous effects, note that this is reasonable above the atmospheric boundary layer (see the discussion in [9]), so that (2.12a)–(2.12c) captures the leading-order dynamics of time-dependent atmospheric flows in the upper troposphere.
3 A Fourier modes existence approach for equatorial waves
As pointed out in the introduction, in equatorial regions the flows is typically azimuthal, so that we investigate the system (2.12a)–(2.12c) under the assumption of a vanishing meridional velocity component (\(V \equiv 0\)):
Setting \(f=U\cos \theta \) we proceed to eliminate the forcing F between the first two equations anove. We obtain
With the Fourier series ansatz
we have that each \(f_n\,(n\ne 0)\) satisfies
while \((f_0)_{t\theta }\equiv 0\). Setting
we conclude that \(g_n\) satisfies the equation
which, upon integration, delivers
where \(c_n(\zeta )=g_n(0,\zeta )\). Hence
To determine \(\omega _n\) let
be the Fourier series representation of F. Then from Eq. (3.1) we obtain that for each \(n\ne 0\) it holds that
and so
On the other hand, utilizing (3.2) and (3.8) we have
Comparing now (3.11) and (3.12) we infer that \(\omega _n=2n\) for all \(n\in {\mathbb {Z}}^{*}\) and \(\omega _0=0\). Consequently,
and
by the ansatz (3.5) for \(f_n\). Moreover, writing
we find from (3.3) that
which, since \(W_n\Big |_{\zeta =0}=0\), implies that
where, we recall, \(c_n(\zeta )=g_n(\theta =0, \zeta )\). Also from (3.3) we have that \((W_0)_{\zeta }\equiv 0\) and, since \(W_0\big |_{\zeta =0}\) we conclude that \(W_0\equiv 0\).
Remark 3.1
Formula (3.16) indicates that the vertical velocity increases with increasing latitude \(\theta \), observation which is in agreement with the results of [6].
Data Availability Statement
The material presented here has no associated data.
References
Boyd, J.P.: Dynamics of the equatorial ocean. Springer (2018)
Constantin, A., Ivanov, R.I.: Equatorial wave-current interactions. Comm. Math. Phys. 370, 1–48 (2019)
Constantin, A., Johnson, R.S.: On the nonlinear, three-dimensional structure of equatorial oceanic flows. J. Phys. Oceanogr. 49, 2029–2042 (2019)
Constantin, A., Johnson, R.S.: On the modelling of large-scale atmospheric flows. J. Differential Equations 285, 751–798 (2021)
Constantin, A., Johnson, R.S.: On the propagation of waves in the atmosphere. Proc. Roy. Soc. A 477, 20200424 (2021)
Constantin, A., Johnson, R.S.: On the propagation of nonlinear waves in the atmosphere. Proc. Roy. Soc. A 478, 20210895 (2022)
Henry, D., Martin, C.I.: Exact, free-surface equatorial flows with general stratification in spherical coordinates. Arch. Ration. Mech. Anal. 233, 497–512 (2019)
Henry, D., Martin, C.I.: Free-surface, purely azimuthal equatorial flows in spherical coordinates with stratification. J. Differential Equations 266, 6788–6808 (2019)
Holton, J.R., Hakim, G.J.: An introduction to dynamic meteorology. Academic Press (2013)
Johnson, R.S.: The ocean and the atmosphere: an applied mathematician’s view. Pure appl. Anal, Comm (2022). https://doi.org/10.3934/cpaa.2022040
Martin, C.I.: On the existence of free-surface azimuthal equatorial flows. Appl. Anal. 96(2017), 1207–1214 (2017)
Martin, C.I.: On periodic geophysical water flows with discontinuous vorticity in the equatorial \(f\)-plane approximation. Philos. Trans. Roy. Soc. A 376, 20170096 (2018)
Martin, C.I., Petrusel, A.: A fixed-point approach for azimuthal equatorial ocean flows. Appl. Anal. 101, 217–224 (2022)
Vallis, G.K.: Atmospheric and oceanic fluid dynamics. Cambridge University Press (2017)
White, A.A.: A view of the equations of meteorological dynamics and various approximations. In Large-scale atmosphere-ocean dynamics (Ed. J. Norbury and I. Roulstone), Cambridge University Press, 1–100 (2002)
White, A.A., Hoskins, B.J., Roulstone, I., Staniforth, A.: Consistent approximate models of the global atmosphere: shallow, deep, hydrostatic, quasi-hydrostatic and non-hydrostatic. Quart. J. R. Met. Soc. 131, 2081–2107 (2005)
White, A.A., Staniforth, A.: A generalized thermal wind equation and some non-separable exact solutions of the flow equations for three-dimensional spherical atmospheres. Quart. J. Roy. Met. Soc. 134, 1931–1939 (2008)
Acknowledgements
The author gratefully acknowledges the support of grant P 33107 N from the Austrian Science Fund (FWF). The author is also thankful to an anonymous referee whose suggestions and remarks have significantly improved the paper.
Funding
Open access funding provided by Austrian Science Fund (FWF).
Author information
Authors and Affiliations
Corresponding author
Additional information
Communicated by Adrian Constantin.
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Martin, C.I. On azimuthally propagating equatorial atmospheric waves. Monatsh Math 201, 1185–1195 (2023). https://doi.org/10.1007/s00605-022-01741-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00605-022-01741-x