
Abstract
In many underground coal mines, a seam is underlain by weak floor material, and the load-carrying capacity of a pillar may be limited not by its own strength but by the bearing capacity of the floor. It has been proposed that bearing capacity may be estimated by formulae such as those of Terzaghi for structural footings on soil, but that approach is generally not valid because, for the slip surfaces assumed in the derivations of the formulae, the rock rises out of the floor beneath adjacent pillars. In the limiting equilibrium analysis proposed here, the distance to the side of a pillar to which a slip surface extends can be constrained according to the roadway or bord width. Examples are shown of the computation of bearing capacities of both homogeneous and multilayer dry and fully saturated floors, and results compared with those of elastoplastic finite element analysis. An approximate comparison with bearing capacities according to Terzaghi's formula for a strip footing is also presented for the hypothetical cases of wider roadways for which the assumed slip surfaces do not extend under adjacent pillars. For the cases considered, there is satisfactory agreement with Terzaghi’s analysis and good agreement with the results of finite element analysis. However, only one finite element analysis was carried out, and it remains to be seen whether such agreement is consistently achieved for ranges of floor strength parameters and horizontal stress.
Highlights
-
The floor which underlies the coal consists of one or more layers of weak sedimentary rock.
-
The method may be applied to dry or fully saturated floor.
-
Ultimate bearing capacity is computed by a novel limiting equilibrium analysis.
-
Computed results are compared with those of Finite element analysis.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The work presented here forms part of a study of the long-term environmental impacts of mining in the Hunter Valley coalfield in New South Wales, Australia. Of particular concern is subsidence caused by the collapse of underground mine pillars, due to either failure of the pillars themselves or of the floor beneath them, as shown in Fig. 1. The analysis proposed here is of floor stability. Failures of which there is documentary evidence are of bord and pillar operations, most if not all of which were decommissioned some years ago. Very little field data exist as it was not envisaged at the time that any would be required in the future, and it may now be impractical or unsafe to obtain such data. Therefore, it is only possible to demonstrate that the results of the proposed analysis are consistent with those obtained by other methods, such as finite element analysis.

Floor heave and pillar failure due to weak strata (after Vasundhara 1999)
In many underground coal mines, a seam is underlain by a layer of soft or weak rock such as shale, mudstone or claystone, and the load-carrying capacity of pillars may be limited not by coal mass strength but by the bearing capacity of the floor material. Soft rock is defined as homogeneous soil-like material, and weak rock as inhomogeneous material with unconfined compressive strength in the rather wide range 0.5–10 MPa (Galvin 2016). According to Galvin, failure of the floor under a pillar results in floor heave in adjoining roadways, rendering them unserviceable, or the extrusion of soft or weak rock from beneath a pillar dragging with it overlying coal and causing tension cracks, which may lead to pillar collapse. For a laminated floor, floor heave may result from the buckling of its layers, each of which acts independently of the others as a horizontal slender strut (Faria Santos and Bieniawski 1989; Mo et al 2018). According to Galvin (2016), swelling of the floor may be the result of the release of excess pore water pressure, causing expansion, which may be viewed as the reverse of soil consolidation, whereas Faria Santos and Bieniawski (1989) and Mo (2019) state that it is the result of expansion due to moisture. Punching failure under a pillar is unlikely to occur because the floor material is already well compacted by vertical pre-mining stress, and its volume will not readily be further reduced by increases in stress caused by mining. The work presented in this paper aims to develop a predictive method using limit equilibrium analysis to determine if bearing failure under pillars will lead to floor heave.
Galvin (2016) describes and discusses limiting equilibrium analyses taken from the literature on foundation engineering, namely Terzaghi's (Terzaghi 1943; Craig 2013) for the ultimate bearing capacity of footings for walls and columns, and variations such as those proposed by Brinch Hansen (Hansen 1970) and Meyerhof (Meyerhof 1963). According to Terzaghi, the ultimate bearing capacity \(q_{u}\) of a long strip footing (the two-dimensional case) is given by:
where \(\gamma\) and \(c\) are the unit weight and cohesion of the soil, B is the width of the footing, \(D\) is the depth of embedment into the soil and the functions \(N_{\gamma }\),\(N_{c}\), and \(N_{q}\) depend upon the angle of friction of the soil. It is considered that:
and
where \(\beta = \frac{\pi }{4} + \frac{\phi }{2}\). Various authors, including Terzaghi, have proposed expressions for the factor \(N_{\gamma }\). The most commonly adopted of these is proposed by Hansen (1970):
and that due to Meyerhof (1963):
Equation 1 has been approximately generalised by Terzaghi and Peck to the three-dimensional case of a square footing as used to support a column (Terzaghi et al. 1996):
Galvin (2016) describes the application of Eqs. 1 and 6 with embedment D taken to be zero to the cases of a chain pillar and a square pillar as in a bord and pillar layout. For a fully saturated floor, the angle of friction \(\phi\) is taken to be zero on the grounds that it represents the worst case of an undrained, fully saturated floor material, but it is noted that for most floor materials, it is hard to imagine that the angle of friction could be less than 10 degrees. Mills and Gale (1993) consider that the angle of friction must be at least 20 degrees.
Figure 2 shows the failure mechanism for a strip footing, according to Terzaghi. In the application of Eqs. 1 and 6 to the analysis of coal pillars, the width B is taken to be the pillar width w. In that case, the distance to either side of the pillar for which floor heave occurs is always greater than the pillar width \(w\), so according to the geometry of Terzaghi's failure mechanism, the rock rises out of the floor beneath an adjacent pillar if \(w\) exceeds the roadway width which is usually no more than six metres. This mechanism severely limits the range of applicability of the analyses of Terzaghi, Hansen and Meyerhof.

Failure under a strip footing with zero embedment according to Terzaghi
In a civil engineering context, Stuart (1962) conducted laboratory testing for two closely spaced footings on granular soils and found that close spacing can increase the bearing capacity of a footing due to vertical confinement provided by adjacent footings. The laboratory results showed that bearing capacity started to increase when the spacing between the two footings was less than three times the footing width.
Vesic (1975) extended the bearing capacity theory to underlying soil or rock consisting of layers of different strengths, and the resulting formula was applied in floor stability assessment and pillar design in the Illinois Basin, USA (Kostecki and Spearing 2015; Galvin 2016). Gadde (2009) then extended Vesic's formula to the Vesic-Gadde solution with cohesion of floor units estimated by moisture content according to the Illinois database. In Australia, the bearing capacity theory, in which the width and thickness of weak intermediate floor units are taken into account developed by Mandel and Salencon (1972) has been applied to the analysis of floor stability in Newcastle Coalfield mines (Galvin 2016).
For an alternative bearing failure mechanism proposed by Terzaghi (Craig, 1966) intended for the analysis of stability of the floor of an excavation (see Fig. 3), account can be taken of a limit on the distance to the side of a loaded area for which floor heave may occur. However, in that analysis, the angle of friction is taken to be zero. In the analysis proposed here, the failure mechanism is similar to that shown in Fig. 3, but the angle of friction is defined to be that of the dry floor material, and the equilibrium is considered not only of the entire sliding rock mass but also of vertical slices as in Bishop's well-established slip circle method (Bishop 1955) for the analysis of soil slope stability.

Failure mechanism for analysis of the stability of the base of an excavation
2 Proposed Computation of Ultimate Bearing Capacity
2.1 Failure Mechanism
The proposed failure mechanism is shown in Fig. 4. Rock mass \({\text{X}}\) rotates about the point O, and rock mass Y slides on its base \({\text{CD}}\). As an idealisation, the two rock masses are taken to be in contact only at point \({\text{D}}\), and a tension crack opens up on BD. The direction of major principal stress in rock mass Y at the initiation of failure is assumed to be practically horizontal, so the angle \(\eta\) is taken to equal \(\frac{\pi }{4} - \frac{\phi }{2}\), which is the angle between the direction of major principal stress and the critical plane of shear failure according to the Mohr–Coulomb criterion (Brady and Brown 2013). For a roadway, if there is bearing capacity failure to one side only, then point C is located at the opposite ribside, and if there is failure to both sides, the point \({\text{C}}\) is located at the centreline to avoid slip surface overlap. The position of point A is determined automatically in the course of analysis rather than specified at the outset. For the analysis, the rock mass X is subdivided into vertical slices 1 to k, and rock mass Y into slices k + 1 to n.

The proposed failure mechanism
2.2 Load Applied by Pillars
When a coal pillar is subjected to load, yielding occurs at the ribsides. In Fig. 5, \(l_{r}\), \(l_{y}\) and \(l_{q}\) denote the plan distances for which the slip surface lies under the roadway, under yielded coal and under unyielded coal, respectively. Finite element and other analyses show vertical stress in unyielded coal (the elastic core of the pillar) to be approximately uniform and to vary approximately quadratically in yielded zones adjacent to the ribsides. The assumed variation shown in Fig. 5 may be summarised as:
where \(\theta (x)\) equals 1 for \(x_{q} < x < x_{h}\), \(\left( {\frac{{x - x_{r} }}{{l_{y} }}} \right)^{2}\) for \(x_{r} < x < x_{q}\) and zero for \(x_{l} < x < x_{r}\). Whereas in the analysis of the stability of a slope subject to known superimposed load, the aim is to calculate a factor of safety against collapse, in the present analysis, it is to calculate the superimposed load given that the factor of safety is 1.0. The single parameter,\({q}_{0}\), fully defines the superimposed load shown in Fig. 5.

Assumed variation of bearing pressure on floor after mining
2.3 Equations of Equilibrium for Slices 1 to \({\varvec{k}}\)
The equations of equilibrium for a single slice of the rock mass \({\text{X}}\) are treated in the same way as in Bishop's slip circle method. Whereas in Bishop's analysis, the aim was to determine a factor of safety against a failure of a slope, here it is to determine the pressure, \(q\), required to cause the failure shown in Fig. 4. In Fig. 6\(b_{i}\) denotes slice width, \(W_{i}\) slice weight, \(\alpha_{i}\) the angle of inclination to the vertical of a line from the midpoint of the slice base to the axis of rotation O and \(\theta_{i}\) denotes the midslice value of the function \(\theta\). Bishop's method was published in 1955 before the development of reliable computers. To render the method amenable to hand computation, it incorporates the following simplifications on the assumption that they do not significantly affect the results of analysis.
-
1)
The interslice forces \(T_{i}\) and \(T_{i + 1}\) are ignored as they are found not to influence the computed factor of safety significantly.
-
2)
The requirement that the sum of horizontal components of applied forces equals zero is ignored.
-
3)
The requirement of moment equilibrium of applied forces is ignored.

Free body diagram for slice \(i\) of rock mass \({\text{X}}\)
This leaves for vertical equilibrium:
For a dry or partially saturated floor, the equation of limiting equilibrium at the base of the slice, according to the Mohr–Coulomb yield criterion, is:
where \(c_{i}\) and \(\phi_{i}\) are cohesion and angle of friction at the base of the slice. Rearranging Eq. 8 and multiplying by \(\sec \alpha_{i}\):
Finally, substituting for \(N_{i}\) in Eq. 9, rearranging and multiplying by \(\cos \alpha_{i}\):
For a fully saturated floor, account must be taken of pore water pressure. Weak floor generally consists of sedimentary rocks such as claystone, which, like soils are particulate, porous materials. Within a soil mass, the superimposed load is transmitted partly by normal and shear forces of interaction at small areas of contact between particles and partly by pore water pressure acting in conjunction with a hydrostatic component of stress in almost the entire volume of each particle. In a particle, stresses and strains are high near areas of contact and low elsewhere. The assembly of particles is known as the mineral skeleton of the soil. Because of the high strains near areas of contact, the bulk modulus of the mineral skeleton (i.e., that of dry soil) is rarely greater than 50 MPa compared with about 1800 MPa for water and generally over 10,000 MPa for the minerals of which the particles consist. It may, therefore, be assumed for practical purposes that all of the superimposed load is transmitted by pore water pressure and associated hydrostatic stress in particles, so:
where u is pore water pressure, σ is total normal stress, and σ׳ is the effective normal stress to be taken into account in the Mohr–Coulomb yield criterion. For weak sedimentary rock, the areas of contact between particles are larger, so the mineral skeleton is stiffer and supports a significant proportion of the superimposed load. It is therefore proposed that (Brady and Brown 2013):
where the Biot coefficient of consolidation α, which is in the range 0.0 to 1.0, may be determined in the laboratory.
When coal is mined, the load is redistributed to pillars. For a fully saturated floor, this causes increased pore water pressure and initiates a process of consolidation in which pore water flows away from the more heavily loaded areas. According to Darcy's equation for velocity of flow v in terms of u:
where k is the coefficient of permeability and s is the direction of flow. The process of consolidation may take anything from a few days to many years, depending upon the value of k, and during that time, pore water pressure falls back towards its initial value prior to mining. Bearing capacity is limited by the greatest values of pore water pressure at any stage of consolidation because those values correspond to the lowest values of σ׳ in Eq. 13. The more permeable the floor and slower the rate of mining, the lower will be the greatest values of pore water pressure as there will be time for more water to drain away before all of the additional load on pillars has been applied. In the proposed analysis, the worst case is assumed of zero permeability and, therefore, no drainage of water from under the pillars.
In the analysis, an equation in terms of q0 for pore water pressure at the slip surface after mining is required. Let qI and uI be the vertical stress and pore water pressure, respectively, at the bottom of the coal before mining. On a tributary area basis, for a chain pillar the length of which is large compared with its width w the average bearing pressure, \(\overline{\sigma }\), after mining is given by:
For the variation of q(x) shown in Fig. 5:
Substituting for \(\overline{\sigma }\) in Eq. 16 and multiplying by \(\frac{w}{{w + l_{r} }}:\)
where
Approximately, for pillars square in plan as in a typical bord and pillar mining layout,
Pore water pressures in the floor after mining are estimated on a slice by slice basis. To simplify the analysis without introducing significant error, it is assumed that slices 1 to k (see Fig. 4) all lie under a pillar and slices k + 1 to n under the roadway. According to Eq. 13, the effective vertical stresses σIi׳ before mining and σi׳ after mining at the base of slice i below a pillar are given by:
and.
In Eqs. 20 and 21, \(\overline{\gamma }\) i and γw are the average unit weight of the slice and the unit weight of water, and hi is the height of the slice. All variables with subscript i are averages over the base of the slice, and it is assumed, as in the original slip circle analysis, that interslice forces may be ignored. Subtracting Eq. 20 from Eq. 21
When the coal is mined, if α = 1.0, there is no change in effective stress, and if α = 0 the change is equal to that in total stress. According to Eq. 22 the change in effective stress varies linearly with respect to α, so:
in which σi = qi + \(\overline{\gamma }\) i hi and σIi = qI + \(\overline{\gamma }\) i hi. Substituting for (σi׳—σIi׳) in Eq. 22:
Rearranging and dividing by α:
Finally, substituting for qi and qI according to Eqs. 7 and 17:
The equation of limiting equilibrium at the base of the slice according to the Mohr–Coulomb yield criterion is:
where according to Eq. 13, the effective normal force Ní is given by:
Rearranging Eq. 8 and multiplying by \(\sec \alpha_{i} :\)
so Eq. 28 may be rewritten as:
Finally, substituting for Ní in Eq. 27, rearranging and multiplying by \(\cos \alpha_{i}\) gives the result:
2.4 Equation of Equilibrium for Slices \(\user2{2k + }{1}\) to \({\varvec{n}}\)
For rock mass Y, the following simplifications are made.
-
1)
As shown in Fig. 7, the interslice forces \(F_{i}\) and \(F_{i + 1}\) are taken to act on a line parallel with and close to the line \({\text{CD}}\).
-
2)
The requirement of moment equilibrium of forces applied to a slice is ignored.

Free body diagram for slice of rock mass Y
Subject to these assumptions, for the sum of all forces on slice \(i\) in the direction of \({\text{CD}}\) to equal zero
and for the sum of all forces in the direction normal to \({\text{CD}}\) to equal zero
For a dry or partially saturated floor, the equation of limiting equilibrium at the base of the slice, according to the Mohr–Coulomb yield criterion, is:
Substituting for \(N_{i}\) in Eq. 34 gives:
and then substituting for \(S_{i}\) in Eq. 32 it is found that:
where, for the slice \(n\) adjoining the point C (see Fig. 4), \(F_{n + 1} = 0\). Summing over the slices \(k + 1\) to \(n\) of rock mass Y yields the result:
The force \(F_{k + 1}\) is that with which rock mass Y acts on rock mass X at D. In the estimation of pore water pressure at the base of slice i for a fully saturated floor, the analysis for rock mass X leading to Eq. 26 with θi taken to equal zero yields the result:
or according to Eq. 17
It can be shown that according to Eq. 39, ui is negative (i.e. the gauge pressure is negative), and the factor of safety is increased by the presence of pore water. In soil slopes, capillary action causes negative pore water pressure above the phreatic surface and also increases the factor of safety, but that is not taken advantage of in engineering practice. It is proposed, therefore, to take pore water pressure to be zero and apply the same analysis as for a dry floor.
2.5 Equation of Moment Equilibrium for Rock Mass X
Rock mass Y exerts on rock mass X an equal and opposite reaction to the force \(F_{k + 1}\) given by Eq. 37, as shown in Fig. 8. Taking moments about the axis of rotation O to be zero:

Free body diagram for rock mass X
where \(R\) equals the radius of the slip surface.
For a dry or partially saturated floor, substitution for \(S_{i}\) according to Eq. 11 and for \(F_{k + 1}\) according to Eq. 37 yields the result:
where
For a fully saturated floor, the initial pore water pressure uI and coefficient of consolidation α must be specified as input data for the analysis. The coefficients Bi and Di are the same as for a dry floor, and by substitution for ui in Eq. 31 according to Eq. 26 and consideration of moment equilibrium about the axis of rotation O, it may be shown that:
In most cases, the initial pore water pressure may be calculated from the elevation of a phreatic surface in the overburden.
2.6 Determination of Ultimate Bearing Capacity and Factor of safety
The actual value \({q}_{m}\) of bearing pressure under the elastic core of a pillar when the general shear failure occurs is the lowest value of \({q}_{0}\) for any combination of the parameters \(l\), \(d\), \(h\) and \(R\) shown in Fig. 4. The consideration of feasible ranges of these parameters would require a large number of analyses, but it can be shown that:
where
and, by inspection of Fig. 4:
Therefore, it is only necessary to carry out analyses for the length and depth of the slip within feasible ranges.
For a pillar the length of which is large compared with its width, the average pillar stress, \(\overline{\sigma }\), for which failure of the floor occurs is given by:
and approximately for a square pillar by:
By comparison of this value with the pillar strength according to an empirically determined power law formula, it may, in principle, be determined whether, with increasing load on a pillar, a collapse will be due to failure of the floor or of the pillar itself. When the difference between the strengths of the floor and of the pillar taken in isolation is small, collapse may occur at a lower load due to interaction between the modes of failure of the floor and pillar.
The adequacy of an engineering design is often assessed on the basis of a factor of safety. In mining engineering practice, the factor of safety F of a pillar is defined as that by which applied load must be multiplied to bring it to a state of limiting equilibrium rather than that by which strength parameters must be divided, as in the design of soil slopes. Therefore:
where on a tributary area basis:
for a pillar the length of which is large compared with its width, and approximately for a pillar square in plan:
3 Case Study Applications
Let us consider a roadway of width 6.0 m with adjacent pillars of plan dimensions 15 m × 15 m, for which there is simultaneous floor bearing failure to both sides, so slip surfaces daylight at the centre of the roadway. The unit weight of the floor is taken to be 0.025 MN/m3, various values of cohesion, angle of friction and thickness, and \({l}_{y}\) of yielded coal are considered.
For a dry or partially saturated floor, computed values of average pillar stress at bearing failure are shown in Fig. 9 for angles of friction 20, 25 and 30 degrees and cohesion in the range 0.25 MPa to 1.0 MPa, and thickness of yielded coal 1.0 m.

Average pillar stress at bearing failure
For cohesion and angle of friction 0.5 MPa and 25 degrees, respectively, according to Fig. 9 the average pillar stress at bearing failure equals 10.0 MPa. Then, for depth of mining 100 m and unit weight of overburden 0.025 MN/m3, according to Eq. 54 in which Kt = 0.51, the factor of safety against bearing failure equals 2.04 compared with 2.77 for the pillar itself according to an empirically determined power law formula with mining height 3.0 m.
It is of interest to know how sensitive pillar stress is at bearing failure to the thickness of yielded coal because that thickness may only be determined by a time-consuming finite element or similar analysis. Figure 10 shows the computed pillar stresses at bearing failure for cohesion 0.5 MPa, for the thickness of yielded coal in the range of zero to 2.0 m. It may be seen that the stresses do not vary rapidly with respect to thickness, so depending upon the accuracy required, it may be permissible to rely on a rough estimate of the thickness rather than carry out the numerical analysis.

Variation of average pillar stress at bearing failure with thickness of yielded coal
In the proposed analysis, it is easy to allow for floor layers of different strengths. Figure 11 shows for two layers the computed variation of average pillar stress at bearing failure with respect to the thickness \(t_{u}\) of the upper layer. The thickness of yielded coal in the pillar is 1.0 m, and cohesions and angles of friction are 0.5 MPa and 25 degrees for the upper layer and 1.0 MPa and 25 degrees for the lower layer. For \(t_{u}\) less than 1.0 m, the slip surface passes through both layers. For \(t_{u}\) between 1.0 m and 1.4 m, it is tangential to the interface between them, and for \(t_{u}\) greater than 1.4 m, its depth below the floor surface is less than that of the interface, and the average pillar stress is equal to that for a single layer.

Variation of average pillar stress at bearing failure with thickness of upper layer
For a fully saturated floor and overburden of unit weight 0.025 MN/m3, computed values of average pillar stress at bearing failure and factors of safety F for depth of mining 100 m are as shown in Table 1, for cohesion and angle of friction 0.5 MPa and 25 degrees respectively and coefficients of consolidation α equal to 0.2, 0.6 and 1.0.
4 Discussion
4.1 Comparison with Terzaghi's Analysis
For a strip footing with zero depth of embedment D (see Eq. 1), it is possible to compare approximately ultimate bearing capacities \({q}_{m}\) calculated according to Terzaghi's analysis as modified by Brinch Hansen and Meyerhof with that predicted by an adaptation of the present analysis in which there are two slip surfaces back to back as shown in Fig. 12. The depths of yielding into ribsides, \({l}_{y}\), are taken to be zero to give a uniformly distributed load exerted by the footing, as in Terzaghi's analysis. Also, to allow that analysis to be applied, hypothetical roadways of widths 4.0 m, 8.0 m and 12.0 m are considered, and the slip surfaces are assumed to extend to their opposite ribsides. By comparison of Fig. 5 and Fig. 12, it may be seen that:

Approximation to Terzaghi’s failure mechanism
Table 2 shows, for cohesion 0.5 MPa and angles of friction 25, 30, and 35 degrees, the computed values of B, \({q}_{m}\) (see Sect. 2.6) and ultimate bearing capacities, \({q}_{u}\), according to the analyses of Hansen and Meyerhof. The greatest difference between \({q}_{m}\) and either value of \({q}_{u}\) is about 7%, which is reasonable given that the slip surface geometry below the loaded area shown in Fig. 12 is significantly different from that shown in Fig. 2.
4.2 Comparison with Finite Element Analysis
The two-dimensional (plane strain) elastoplastic finite element analysis shown here is for the roadway of width 6.0 m and adjacent pillar of width 15.0 m as described in Sect. 3, for a Mohr–Coulomb material with cohesion and angle of friction 0.5 MPa and 25 degrees, respectively. According to the limiting equilibrium analysis, the floor fails when the bearing pressure, \({q}_{0}\), below the elastic core of an adjacent pillar equals 11.94 MPa.
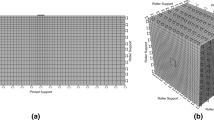
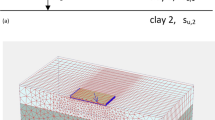
In a finite element analysis, material stiffness and the pre-mining stress field must be specified. The values of Young's modulus of elasticity and Poisson's ratio are arbitrarily taken to be 5000 MPa and 0.2, respectively, and it is assumed that the initial horizontal stress in the floor is 1.0 MPa and tensile strength equals 0.1 MPa. For consistency with the assumption in limiting equilibrium analysis that at some stage of collapse, peak strength is mobilized simultaneously at every point of the slip surface, peak and residual values of cohesion and angle of friction are taken to be equal. The floor, of unit weight 0.025 MN/m3, is modelled from the centreline AD of the roadway to the centreline BC of an adjacent pillar and to a depth into the floor of 16.0 m, as shown in Fig. 13. The finite elements are three-node (constant strain) triangles. Horizontal displacements are taken to equal zero on the vertical sides of the mesh, vertical displacement is taken to equal zero at point B, and the loading shown in Fig. 5 is applied to side AB of the mesh in conjunction with an equilibrating uniformly distributed load on side CD. A part of the finite element mesh is shown in Fig. 14.

Dimensions of the finite element mesh and applied loads for the case \(q_{0} = 12MPa\)

Part of the mesh, showing applied load for \(q_{0} = 12MPa\)
It is found by the method of bisection that, according to the finite element analysis described above, the value of \({q}_{0}\) at the failure of the floor is in the range of 12 MPa to 12.1 MPa, compared with the value of 11.94 MPa according to limiting equilibrium analysis. To determine whether it is by chance that there is such good agreement between the limiting equilibrium and finite element results would require a large number of analyses to be carried out for ranges of values of cohesion, angle of friction and horizontal stress in the floor. Computed deformation vectors at failure are shown in Fig. 15. It is not possible to discern from either the plot of deformation vectors or, indeed, from one of maximum shear strain the precise location of a slip surface. It may well be that the results of analysis vary significantly with initial horizontal stress in the floor, in which case it could be worthwhile, if possible to modify the limiting equilibrium analysis to take that factor into account. If the floor was to be considered to undergo strain softening, finite element analysis would predict lower values of ultimate bearing capacity because, in reality, at any stage of the development of a slip surface, there would be a few points (usually one or two) at which peak strength was mobilized, to one side of each point there would be material which has not yet yielded in which stresses were still increasing, and to the other side there would be material which has already yielded in which stresses were decreasing according to the strain softening law. This is taken into account in the finite element model but not in limiting equilibrium analysis.

Deformation vectors at failure of the floor
4.3 Validity of Multilayer Analysis
In the last analysis of Sect. 3, the case of a floor consisting of a weak layer underlain by stronger rock is considered. The slip surface is assumed to take the form of a circular arc AD and straight line DC, as shown in Fig. 4, and as discussed in Sect. 2, the sliding rock mass is taken to break into two parts, one of which rotates about an axis and the other travels in a straight line. Both parts remain intact as they move. This is reasonable if there is only one rock type in the floor, but for multiple layers, the slip surface for which the bearing pressure, \({q}_{0}\), is a minimum that would deviate from an arc and a straight line to reduce the proportion of its length passing through stronger layers.
The extent of deviation is, however, limited by energy considerations. During the process of collapse, the applied loads, \({q}_{0}{{\theta }_{i}b}_{i}\), do work on the sliding rock mass, that mass gains or loses a relatively small amount of gravitational potential energy, and plastic work is done along the slip surface and through the volume of sliding rock, which, assuming no gaps or overlaps develop between it and the underlying rock, must deform as it slides. A very small amount of work is also done to create the crack on the line BD shown in Fig. 4. Ignoring that work and the change of potential energy, the work done by applied loads must equal the sum of the plastic work done along the slip surface and the plastic work done through the volume of sliding rock. If the work done through the volume of rock exceeds the reduction of work done along the slip surface, the value of \({q}_{0}\) will be greater than for the slip surface shown in Fig. 4. Probably, it would not be worthwhile to consider such deviation for the layer strength ratio 2:1 of the example in Sect. 3. In civil engineering practice, Bishop's slip circle method is routinely used to calculate factors of safety of multilayered soil slopes. Generalisation to an arbitrary slip surface profile would require the use of principles of analysis developed by Morgenstern and Price (1965) or Spencer (1967) for non-circular slip surfaces, thereby significantly increasing the complexity of the analysis.
5 Conclusion
Attempts to predict by limiting equilibrium analysis whether bearing failure of soft rock below coal pillars will occur have generally been based upon well-established methods borrowed from soil mechanics, such as the formulae proposed by Terzaghi for the ultimate bearing capacity of footings and various methods of slices such as Bishop's slip circle method for slope stability analysis. However, taken out of the context of soil mechanics, these analyses are either inappropriate or unreliable. For a bord and pillar mining layout, the failure mechanism proposed by Terzaghi generally extends under pillars adjacent to that under which bearing failure occurs, so it is not feasible. For a slip circle in a horizontal floor rather than a slope Bishop's method, which incorporates certain simplifications made to enable it to be used without the aid of a computer, generally is valid only for the angle of friction zero.
The approach taken here is to adapt Bishop's method to underground mining. The derivation of Terzaghi's formulae for footings is difficult to understand, appears to depend largely upon the use of undocumented graphical constructions, and, therefore, is difficult to adapt. Terzaghi also proposed the failure mechanism shown in Fig. 3 for the base of an excavation in soil but only carried out an analysis for the case of zero angle of friction. However, the geometry of that mechanism, quite apart from being more plausible than just a circular arc, happens to overcome the obstacle to the application of a method of slices in which the angle of friction is not necessarily zero and allows the distance to which the failure mechanism can extend to either side of a pillar to be specified. The proposed solution is, therefore, the arc and straight line slip surface shown in Fig. 4 and an analysis as similar as possible to that of Bishop for slope stability as described in Sect. 2. The only further assumption made is that a pillar applies to the floor the loading shown in Fig. 5, which is an approximation to the variation of vertical stress in a coal pillar indicated by various numerical analyses.
In the comparison of the values of ultimate bearing capacity given by the proposed analysis with those according to Terzaghi's formula for a strip footing with zero embedment, the greatest difference is about 7%, and it is pointed out in Sect. 4.1 that this could be due to a significant difference between the failure mechanism shown in Fig. 12 and that proposed by Terzaghi. The agreement between the proposed analysis and the finite element method is very good for cohesion 0.5 MPa and angle of friction 25 degrees, but it is not yet known whether that would be so for other values of those strength parameters. It is also not known whether the assumption of limiting equilibrium analysis that peak strength is mobilised simultaneously at every point of the slip surface is reasonable. Possibly a satisfactory approach would be to adopt peak values of cohesion and angle of friction for the estimation of short to medium (life of mine) bearing capacity and residual values in the estimation of bearing capacity in the long term as required in the assessment of eventual environmental impact. Furthermore, a floor could collapse by means other than a rotational mode of failure.
The analysis of the effect of pore water indicates that due to redistribution of load to pillars, for a fully saturated floor, a reduction of pillar stress at bearing failure occurs even if the initial pore water pressure is zero, so for example, in a case considered in Sect. 3 for coefficient of consolidation equal to 0.6 and initial pore water pressure zero the average pillar stress at bearing failure is 6.30 MPa compared with 10.0 MPa for a dry floor. It is clear from the results shown in Table 1 that for the proposed analysis to be applicable, a reasonably accurate value of the coefficient of consolidation must be available.
Finally, no analysis can be better than the input data. There currently exists very little field or laboratory data upon which to base a validation of the proposed analysis. The future work will, therefore, include gathering quality data to validate that analysis.
Data availability
The datasets generated during and/or analysed during the current study are available from the corresponding author on reasonable request.
Abbreviations
- \(B\) :
-
Width of shallow foundation
- b :
-
Dimension in Fig. 3
- \(c\) :
-
Cohesion
- \(D\) :
-
Depth of embedment into soil
- \(F_{i}\) and \(F_{i + 1}\) :
-
Interslice forces parallel with slip surface
- h i :
-
Height of rock slice
- K t :
-
Ratio of average pillar stress to vertical pre-mining stress
- K v :
-
Ratio of vertical pre-mining stress to elastic core
- k :
-
Coefficient of permeability
- \(N_{c}\), \(N_{q}\), and \(N_{\gamma }\) :
-
Factors in Terzaghi's bearing capacity formula
- N i :
-
Normal force on base of rock slice
- P i and P i + 1 :
-
Inter slice normal forces
- q :
-
Vertical stress
- q I :
-
Vertical pre-mining stress
- \(q_{m}\) :
-
Lowest computed stress in pillar elastic core at general shear failure
- \(q_{0}\) :
-
Computed stress in pillar elastic core at general shear failure for one particular ship surface
- \(q_{u}\) :
-
Ultimate bearing capacity according to Terzaghi's formula
- S i :
-
Shear force on base of rock slice
- s :
-
Direction of flow of groundwater
- \(T_{i}\) and \(T_{i + 1}\) :
-
Interslice shear forces
- u :
-
Pore water pressure
- u I :
-
Pre-mining pore water pressure
- \(w\) :
-
Pillar width
- \(x,x_{h} ,x_{l} ,x_{q} ,x_{r}\) :
-
Horizontal coordinates in Eq. 4
- \(\alpha\) :
-
Biot coefficient of consolidation
- \(\alpha_{i}\) :
-
Angle to vertical in Fig. 8
- \(\beta\) :
-
Angle in Eq. 2
- \(\theta_{x}\) :
-
Weight function in Eq. 7
- θ i :
-
Average weight function for slice i
- \(\gamma\) :
-
Unit weight of soil
- \(\overline{\gamma }\) i and γw :
-
Average unit weight of slice i and the unit weight of water
- v :
-
Velocity of flow of groundwater
- σ :
-
Total normal stress
- σ׳:
-
Effective normal stress
- \(\overline{\sigma }\) :
-
Average pillar stress
- σI i׳:
-
Effective vertical stresses before mining
- σi׳:
-
Effective vertical stresses after mining at the base of slice i below a pillar
- \(\phi\) :
-
Angle of friction
References
Bishop AW (1955) The use of the slip circle in the stability analysis of slopes. Geotech 5(1):7–17
Brady, B H G and Brown, E T, 2013. Rock mechanics: for underground mining.
Craig, R F, 2013. Soil mechanics.
Faria Santos C, Bieniawski Z (1989) Floor design in underground coal mines. Rock Mech Rock Eng 22(4):249–271
Gadde, M M, 2009. Weak floor stability in the Illinois Basin underground coal mines, PhD Thesis, West Virginia University.
Galvin JM (2016) Ground engineering principles and practices for underground coal mining. Springer, Cham
Hansen JB (1970) A revised and extended formula for bearing capacity. Danish Geotechnical Institute Bulletin 28:5–11
Kostecki T, Spearing A (2015) Influence of backfill on coal pillar strength and floor bearing capacity in weak floor conditions in the Illinois Basin. Int J Rock Mech Min Sci 76:55–67
Mandel J, Salencon J (1972) Force portante d’un sol sur une assise rigide (étude théorique. Geotech 22(1):79–93
Meyerhof GG (1963) Some recent research on the bearing capacity of foundations. Can Geotech J 1(1):16–26
Mills K, Gale W (1993) Review of pillar behaviour in claystone strata. Report to Elcom Collieries and Coal and Allied.
Mo S, Ramandi H, Oh J, Masoumi H, Timms W, Canbulat I, Hebblewhite B, Saydam S (2018) A Review of floor heave mechanisms in underground coal mine roadways. In: Proc 4th Aust Ground Contr in Min Conf, pp 196–206.
Mo, S, 2019. Floor heave mechanisms in underground coal mine roadways, PhD Thesis, University of New South Wales, Sydney, Australia.
Morgenstern NR, Price VE (1965) The analysis of the stability of general slip surfaces. Geotech 15(1):79–93
Spencer E (1967) A method of analysis of the stability of embankments assuming parallel inter-slice forces. Geotech 17(1):11–26
Stuart J (1962) Interference between foundations, with special reference to surface footings in sand. Geotech 12(1):15–22
Terzaghi K (1943) Theoretical Soil Mechanics. Wiley, Germany
Terzaghi K, Peck RB, Mesri G (1996) Soil mechanics in engineering practice. Wiley, Germany
Vasundhara, 1999. Geomechanical behaviour of soft floor strata in underground coal mines, PhD thesis, University of New South Wales, Sydney.
Vesic, A, 1975. Bearing capacity of shallow foundations, in Foundation engineering handbook (eds: Winterkorn, H and Fang, H), pp 121–147 (Van Nostrand Reinhold: New York).
Acknowledgements
This study is funded by the Australian Coal Association Research Program (ACARP) (No. C29041).
Funding
Open Access funding enabled and organized by CAUL and its Member Institutions. Australian Coal Industry’s Research Program, C29041, Ismet Canbulat.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors have no relevant financial or non-financial interests to disclose.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Watson, J., Canbulat, I., Wei, C. et al. Ultimate Bearing Capacity of Weak Foundations under Coal Pillars. Rock Mech Rock Eng (2024). https://doi.org/10.1007/s00603-024-03999-z
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s00603-024-03999-z